基于IFF信號單站無源定位技術(shù)研究
2018-02-28 10:53:31徐盼盼柏如龍
無線電通信技術(shù) 2018年2期
關(guān)鍵詞:信號
孫 超,徐盼盼,柏如龍
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引言
對空中目標輻射源單站無源定位技術(shù)一直是電子偵察領(lǐng)域的一個研究難點[1]。當前單站無源定位技術(shù)的主要對象是固定目標或者勻速運動的目標,而對空中機動目標單站無源定位技術(shù)研究較少,難度較大。利用空中目標發(fā)射的IFF信號中包含高度信息的特點,基于方位、俯仰和高度3個觀測量,建立單站定位模型,可實現(xiàn)對空中目標的單站無源定位。劉睿嵐教授早在2006年就提出了利用二維測向+解譯高度值的單站定位算法[2],文獻中采用的測向算法是雙平面單脈沖測向,測向精度有限。文中主要研究基于相位差和解碼信息的多目標分離、高精度測向定位技術(shù)以及基于廣播式自動相關(guān)監(jiān)視信號(ADS-B)誤差校準等關(guān)鍵技術(shù),并在此基礎(chǔ)上分析了針對民航飛機的實際應(yīng)用情況。
1 IFF應(yīng)答信號解譯
從20世紀30年代美國率先研制出具有代表性的第一代IFF系統(tǒng)以來,到目前為止最有代表性的IFF系統(tǒng)有MARK X系統(tǒng)、MARK XII(A)系統(tǒng)和S模式。
1.1 MARK X系統(tǒng)應(yīng)答信號高度信息解譯
MARK X的應(yīng)答信號是由一組脈沖信號構(gòu)成,其信號格式如圖1所示[3]。
應(yīng)答信號由2個框架脈沖F1、F2及位于框架脈沖之間的13個脈沖寬度為0.45 μs的脈沖信號組成。相鄰脈沖之間的間隔為1.45μs,13個脈沖不一定都有,如果有脈沖,則表示為1,沒有脈沖則表示為0。脈沖信息由A(A1,A2,A4)、B(B1,B2,B4)、C(C1,C2,C4)及D(D1,D2,D4)組成,共12個脈沖,中間脈沖X不作使用,專用位置顯示脈沖 (Special Position Indicator,SPI)位于F2之后4.35 μs處,一般不使用,當2架飛機距離較近時,才使用該脈沖。12個脈沖信息可以給出4 096種組合用于傳送信息,表1 給出了各種應(yīng)答模式下所使用的編碼。

圖1 MARK X應(yīng)答信號格式
表1 應(yīng)答信號編碼

模式類型碼字個數(shù)模式132模式24096模式3/A4096模式C2048
模式3/A為飛機身份碼詢問和應(yīng)答模式,軍民共用。當應(yīng)答器響應(yīng)身份詢問時,應(yīng)答碼代表身份碼。在目標執(zhí)行任務(wù)過程中,身份碼具有唯一性,可利用身份碼對空中目標進行多目標分離。
模式C應(yīng)答信號代表高度碼,高度碼的組成順序是:D1D2D4、A1A2A4、B1B2B4、C1C2C4。
其中D1~B4按“標準循環(huán)碼”(也叫格雷碼)編碼,它的最小遞增單位為500英尺,C組碼是“五周期循環(huán)碼”,其最小遞增單位為100英尺。這樣,當C組碼連續(xù)遞增5次(累計增量500英尺),標準循環(huán)碼遞增一次。由模式C應(yīng)答信號,可獲得目標的高度值[9]。
1.2 S模式應(yīng)答信號高度信息解譯
S模式應(yīng)答信號分為長S模式和短S模式,信號格式如圖2 所示。S模式應(yīng)答引導脈沖總共4個,脈沖寬度均為0.5 μs。
數(shù)據(jù)塊根據(jù)脈沖位置進行調(diào)制編碼。每比特數(shù)據(jù)碼對應(yīng)于1 μs的時間。在編碼過程中,1 μs又分成2個周期,各占0.5 μs。若第一個周期有一個脈沖,而第二個周期無脈沖,則對應(yīng)的信息碼為1。反之,若第一個周期無脈沖,而第二個周期有一個脈沖,則對應(yīng)的信息碼為0。

圖2 S模式應(yīng)答信號格式
長S模式數(shù)據(jù)長度為112 bit,短S模式數(shù)據(jù)長度為56 bit,根據(jù)詢問信號的要求來確定應(yīng)答使用哪一種模式。不管長S模式還是短S模式,最后的24位校驗位。S模式信號可解譯得到地址碼、位置、速度、身份等信息。其中地址碼共24 bit,是國際民航組織為每架飛機分配的唯一標識,可用來進行多目標分離。高度信息的解譯與Mark X系統(tǒng)高度解譯類似[4],這里不再詳細描述。
2 時域參數(shù)檢測與模式識別
2.1 時域參數(shù)檢測
IFF信號時域參數(shù),即脈沖描述字,包括脈沖到達時刻(TOA)、脈沖寬度(PW)、脈沖幅度(PA)等,脈沖描述字檢測原理如圖3所示。
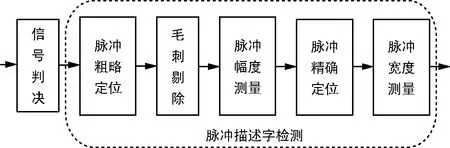
圖3 敵我識別信號時域參數(shù)檢測原理
① 計算脈沖檢測門限Threshold,將信號中所有小于門限值Threshold的樣點置零;
② 檢測脈沖上升沿、下降沿,并計算脈沖寬度PW,實現(xiàn)脈沖的粗略定位;
③ 根據(jù)脈沖寬度設(shè)置門限,將脈寬小于門限的毛刺剔除;
④ 計算脈沖上升沿和下降沿之間信號的最大幅度,按照幅度的一半進行截取,獲得脈沖的起止時刻,實現(xiàn)對脈沖的精確定位;
⑤ 脈沖精確定位之后,利用脈沖的起止時刻計算得到精確的脈沖寬度。
2.2 脈沖分選和模式識別
根據(jù)測得的時域、頻域參數(shù),進行脈沖信號的分選與模式識別。在測量出各脈沖時域參數(shù)的基礎(chǔ)上,根據(jù)敵我識別信號格式及技術(shù)參數(shù)[9]分析,進行脈沖的分選與信號模式識別。敵我識別信號脈沖分選與模式識別原理如圖4所示。
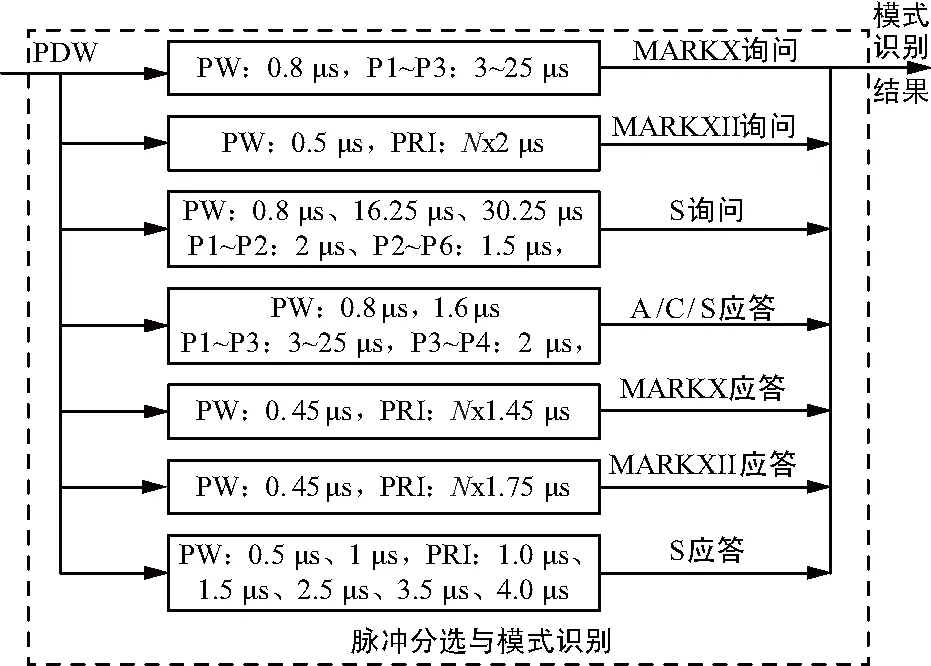
圖4 敵我識別信號脈沖分選與模式識別原理
對于詢問信號,篩選出脈沖寬度為0.5 μs、0.8 μs、16.25 μs、30.25 μs的脈沖。
對于脈沖寬度為0.5 μs的脈沖,再篩選出脈沖間隔為2 μs的整數(shù)倍的脈沖,并將符合寬度為0.5 μs、間隔為2 μs整數(shù)倍的脈沖串識別為MARK XII(4)模式;
對于脈沖寬度為0.8 μs的脈沖,分析脈沖間隔,如果2個脈沖之間的間隔為3/5/8/17/21/25 μs,則將該脈沖串分別識別為1、2、3/A、B、C、D模式;如果在第2個脈沖之后的2 μs處出現(xiàn)寬度為0.8 μs或1.6 μs的P4脈沖,則將其識別為A/C/S全呼叫模式;
對于脈沖寬度為0.8 μs的脈沖,如果2個脈沖之間的間隔為2 μs,則進一步檢測P6脈沖,根據(jù)P6脈沖持續(xù)時間為30.25 μs或16.25 μs分別將其識別為長S模式或短S模式;
對于應(yīng)答信號,篩選出脈沖寬度為0.45 μs、0.5 μs、1.0 μs的脈沖。
對于脈沖寬度為0.45 μs的脈沖,再篩選出脈沖間隔為1.45 μs的整數(shù)倍的脈沖,如果檢測到框架脈沖,則將其識別為MARK X應(yīng)答模式;將脈沖間隔為1.75 μs整數(shù)倍的脈沖識別為MARK XII(4)應(yīng)答模式;
對于脈沖寬度為0.5 μs或1.0 μs的脈沖,再篩選出脈沖間隔為1.0 μs、2.5 μs、3.5 μs、4.0 μs的脈沖流,如果檢測到前導脈沖,則將其識別為S模式應(yīng)答信號,根據(jù)信號持續(xù)時間進一步確定為長、短模式。
3 IFF信號測向定位
基于IFF信號單站無源定位模型如圖5所示,其中R0為地球半徑,Lon0、Lat0、H0分別為接收站經(jīng)度、緯度、高度,Lon1、Lat1、H1分別為空中目標經(jīng)度、緯度、高度,H1由IFF應(yīng)答信號C模式或者S模式解譯得出,β為接收站觀測到的目標俯仰角,L為目標與接收站之間的距離。

圖5 IFF單站無源定位模型
3.1 二維測向
如圖6所示,方位基線上的理論相位差φα與方位角α、俯仰角β、方位基線長度lα之間的關(guān)系式如式(1)所示。

圖6 方位與俯仰在二維測向模型中的示意圖
(1)
式中,λ為信號波長。俯仰基線上的理論相位差φβ與俯仰角β、俯仰基線長度lβ之間的關(guān)系式表示為:
φβ=2π/λ·lβsin(β)。
(2)
先利用式(2)求解俯仰角β,再將β代入式(1),求解方位角α。
3.2 已知方位俯仰求解目標位置
根據(jù)獲知的目標方位角α、俯仰角β,解譯得到的目標高度H1以及接收站經(jīng)度Lon0、緯度Lat0、高度H0的條件下,建立定位模型,根據(jù)公式推導,目標經(jīng)緯度的計算公式可表示為:
H=(H1-H0)/arcsin(β)/R,
(3)
Lat1=asin(sin(Lat0)cos(H))+cos(Lat0)sin(H)cos(α)),
(4)
Lon1=Lon0+
(5)
式中,R表示為地球半徑。
4 IFF單站定位系統(tǒng)校準
IFF應(yīng)答信號長S模式中包含了ADS-B信號, ADS-B信號中包含民航飛機的位置信息,可以實時解譯出民航目標的經(jīng)度、緯度、高度信息[5]。利用這種特性,可將民航目標上的ADS-B設(shè)備作為校準源、ADS-B信號作為校準信號,對系統(tǒng)進行誤差校準。
4.1 利用ADS-B信號精確估計方位和俯仰
根據(jù)接收站的經(jīng)緯度Lon0、Lat0、H0及目標的經(jīng)緯度Lon1、Lat1、H1,按照定位模型可將方位角α、俯仰角β,表示為:
(6)
(7)
式中,L表示民航目標與接收站之間的距離。
4.2 通道相位誤差估計
在求得理論上的方位角和俯仰角后,繼續(xù)對通道誤差進行校準。利用通道誤差公式
Error方位= mod(α-[l方位×cos(α理)×
cos(β理)×360×f/c],360),
(8)
Error俯仰= mod(β俯仰-[l俯仰×sin(β理)×
360×f/c],360)。
(9)
分別求得不同基線長度(不同通道之間)的誤差值,各自求平均值,作為通道誤差校準值。
5 試驗結(jié)果
5.1 通道相位誤差估計結(jié)果
通過外場試驗數(shù)據(jù)測試系統(tǒng)性能,在實際信號環(huán)境中,對一段時間內(nèi)多個民航目標發(fā)射的IFF信號進行偵收,并且篩選出其中的ADS-B信號,解譯出民航目標的位置信息。首先利用式(6)和式(7)求解出理論上的俯仰角和方位角,然后利用式(8)和式(9)計算得到通道誤差曲線,剔除每條基線的相位誤差散點后再求平均,實現(xiàn)對基線通道相位誤差的高精度估計,如圖7所示。

圖7 方位俯仰基線通道相位誤差曲線
5.2 二維測向結(jié)果
完成對系統(tǒng)誤差的校準之后,在實際信號環(huán)境中,對空中的民航目標發(fā)射的IFF信號進行偵收和處理,其中方位測向和俯仰測向的結(jié)果如圖8所示。
對圖8中方位測向和俯仰測向結(jié)果分別與ADS-B解譯得到的方位俯仰結(jié)果進行比較,得出結(jié)論:方位精度優(yōu)于0.4°,俯仰精度優(yōu)于0.3°。
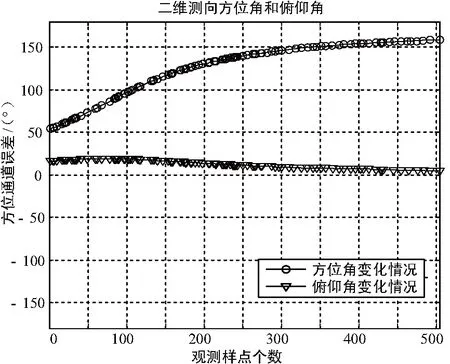
圖8 對空中目標二維測向結(jié)果曲線
5.3 單站定位結(jié)果
在實際信號環(huán)境中,對空中民航目標進行定位,其定位結(jié)果與ADS-B解譯位置信息進行比較,得到定位精度的曲線如圖9所示。

圖9 對空中目標定位誤差曲線
從圖9的定位誤差曲線可以看出,在200 km以內(nèi),系統(tǒng)的定位精度在1%~1.5%之間,隨著目標距離的增加,定位誤差逐漸增大。
6 結(jié)束語
對基于IFF信號單站無源定位技術(shù)進行了研究,并通過偵收實際信號環(huán)境中的IFF信號驗證了二維測向+高度的定位體制的可行性。該技術(shù)需要的設(shè)備量小,實現(xiàn)簡單,未來可布置在島礁、偏僻西部山區(qū)對空域中的民航目標、無人機甚至軍事目標進行監(jiān)視與跟蹤,具有重大的推廣價值。
[1] 張軍.空域監(jiān)視技術(shù)的新進展及應(yīng)用[J].航空學報,2011,32(1):1-14.
[2] 劉睿嵐,鐘民.基于敵我識別信號的單站無源定位技術(shù)研究與實現(xiàn)[C]∥2006軍事電子信息學術(shù)會議論文集.北京,2006:1265-1269.
[3] RTCA DO-260A.Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance-Broadcast(ADS-B) and Traffic Information Services-Broadcast(TIS-B)[S],2003.
[4] 錢眺,茅玉龍,查榮.混疊敵我識別信號分離算法研究[J].無線電工程, 2011, 41(1):18-21.
[5] 彭良福,鄭超,劉志剛.1090ES廣播式自動相關(guān)監(jiān)視系統(tǒng)的CPR算法[J].中國民航大學學報,2010,28(1):33-37.
[6] 張濤,唐小明,金林.ADS-B用于高精度雷達標定的方法[J].航空學報,2015,36(12):3947-3956.
[7] 鄭攀,程婷,何子述.二維干涉儀測向算法研究[J].現(xiàn)代電子技術(shù),2013,36(1):1-4.
[8] 李淳,廖桂生,李艷斌.改進的相關(guān)干涉儀測向處理方法[J].西安電子科技大學學報,2006,33(3): 400-403.
[9] 李桓.基于模式A/C和模式S的機載詢問及應(yīng)答機系統(tǒng)[D].成都:電子科技大學,2012.
[10] 趙琨,何玉紅.IFF 應(yīng)答信號實時檢測技術(shù)[J].無線電通信技術(shù),2012,36(2):52-54.
[11] 任巧.敵我識別S 模式突發(fā)DPSK 信號解調(diào)算法研究及PDGA 實現(xiàn)[D].鄭州: 解放軍信息工程大學,2009.
[12] 孫凌宇,羅靜,屈佑金.混疊敵我識別信號分離算法研究[J].無線電工程,2011,41(1):18-21.
[13] 李紅偉,李仕云,紀學軍.一種高精度運動多站無源定位算法[J].無線電工程,2014,44(3):24-27.
[14] 高新平.敵我識別S模式詢問信號實時檢測技術(shù)[J].無線電工程,2016,46(6):27-29.
[15] 楊松.基于峰值比的疊加單滑窗信號檢測算法[J].無線電工程,2017,47(4):78-82.
[16] 林肖輝,柏如龍.長時間相干累積算法研究[J].無線電工程,2015,45(4):74-76.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06