基于語義分割的增強現實圖像配準技術
2018-02-28 09:38:04卞賢掌費海平李世強
電子技術與軟件工程 2018年23期
關鍵詞:深度學習
卞賢掌 費海平 李世強
摘要
增強現實(AR)通過分析場景特征,將計算機生成的幾何信息通過視覺融合方法添加到真實環境中,以增強對環境的感知。其中圖像配準技術是AR技術的核心問題之一,即在三維環境中估計視覺傳感器的姿態并理解場景中的對象。近年來,計算機視覺領域取得了巨大的進步,但是AR系統在三維場景中基于自然特征點的配準技術仍然是一個嚴重的挑戰。由于不穩定因素的影響,在三維場景中精確計算移動相機的姿態還存在較大的困難,如圖像噪聲,光照變化和復雜的背景圖案。因此,設計一種穩定、可靠、高效的場景識別算法仍然是一項非常具有挑戰性的工作。本文提出了一種結合視覺同步定位與地圖構建(SLAM)和基于深度卷積神經網絡(語義分割)的語義分割算法來提高AR圖像配準性能。基于語義分割的語義分割是一種計算量較大的預測任務,其目的是在應用AR圖像配準時預測圖像中每個像素的類別,并能夠縮小兩幀之間特征點的搜索范圍,從而提高系統的穩定性。實驗結果表明,語義分割的場景信息將大幅提高AR圖像配準技術的性能。
【關鍵詞】語義分割 SLAM 深度學習 增強現實
1 介紹
增強現實技術(AR)是一種新型的人機交互技術,它利用計算機系統提供信息來增強人們對真實環境的感知。真實場景將疊加計算機生成的虛擬場景、對象或系統信息,實現對現實的增強。AR技術強調現有虛擬世界與虛擬世界的融合,強調真實對象與虛擬對象的共存與互補。其中圖像配準是AR技術的關鍵內容之一。
如圖1所示,目前大多數川之應用都是通過相機識別已知的標記來計算三維配準的空間位置,將虛擬模型疊加在真實場景中。然而,一般在行業應用中不允許使用標記,因此使用自然特征點進行三維配準是AR應用的必然趨勢。
目前,基于自然特征點的三維配準技術主要采用視覺同步定位與地圖構建(SLAM)算法[1][2]。圖2是視覺SLAM的示意圖。利用機器視覺提取圖像特征點,計算描述符和匹配特征點。相機捕捉相鄰幀的連續視頻序列并匹配關鍵點,并根據相機姿態的匹配結果,最終實現AR的3D配準。
然而,基于自然特征點的三維配準算法目前還不成熟。很容易匹配錯誤的特征點,從而限制了AR應用的推廣。造成不匹配的主要原因是場景中有很多特征點,并且有很多相似的特征,這時當相機采集圖像并匹配像素點時,就很容易混淆。本文研究了一種基于語義分割的強魯棒場景感知技術,在對自然特征點進行匹配的同時對匹配區域進行限制。首先將相機拍攝的場景進行語義分割,即根據對象本身的含義將各階段的對象進行分割。當對三維配準的自然特征進行匹配時,相鄰幀的匹配結果僅限于同一對象的像素區域。
如圖3所示,當相鄰幀特征點匹配,桌子和椅子分別對應,如果匹配特征點是放在桌子上,其余的是在椅子上,我們可以判斷哪些是錯誤匹配點并刪除它們,這將提高自然特征點匹配精度。
2 相關研究
基于自然特征點的AR尚處于初始階段,大多數基于自然特征點的AR應用配準都使用了視覺SLAM算法。Castle等人[3]的作品是最早將物體識別和單眼關鍵幀與SLAM相結合的作品之一。在檢測到兩幀圖像中的物體后,他們在地圖上計算出物體的位置。但與我們的方法不同,它們只關注點的幾何意義,對AR三維配準的語義信息和優化不感興趣。
Bao等人[4]是第一個從運動(SSFM)中應用語義結構的研究員。SLAM執行視頻流使得點云和關鍵幀的映射逐漸遞增,而SSFM可以同時處理所有幀,SSFM的重構與識別是分離與獨立的,SSFM使用邊框搜索對象并專注于重建。
Fioraio等人[5]展示了一個新的SLAM系統,該系統將3D對象添加到地圖中,并通過調整來優化它們的姿態。他們建立了含有7個對象的數據庫來描述這些對象,這些對象采用RGB-D攝像機在幾個尺度上獲得三維特征,并為每個尺度創建了獨立的索引。通過尋找3D到3D的對應關系,實現了目標識別,并采用RANSAC算法進行濾波。雖然它們可以生成房間大小的地圖,但是它們的應用程序不會實時運行。
Salas-Moreno等人[6]提出了一種結合了RGB-D地圖重建和目標識別的新型視覺SLAM系統。他們用KinectFusion預建對象數據庫,用點來描述對象的幾何形狀。這些點都由哈希表索引,并通過計算hough投票來標識。但它對數百個對象的可擴展性尚不清楚。
Abhishek Anand等人[7]提出了一種通過檢測點云來獲取語義對象的方法。他們訓練相應對象的特征點,并匹配新幀的幾何信息。Liefeng Bo等人[8]提出了一種利用特征點與RGB-D信息匹配來檢測目標的方法。DanielMaier等人[9]利用NAO機器人攜帶AsusXtion Pro實時傳感器,實現了機器人在3D環境下的定位和障礙物識別,重建了3D點云環境,但缺乏場景的語義信息。
為了理解場景,語義分割起著至關重要的作用,引起了越來越多研究者的興趣[10-13]。在現有的方法中,卷積神經網絡(neural network,CNN)在利用RGB圖像進行語義分割方面具有很大的優勢。典型的CNN,稱為全卷積神經網絡(FCN),在過去幾年中已經取得了重要的進展。文獻[14]采用以不同層間融合為代表的編碼器式FCNs,大大提高了預測精度的密度。為了在不丟失分辨率的情況下擴展接收域,并在多個分割任務中獲得更好的性能,擴展卷積算子取代了碼譯碼器體系結構。盡管做了很多努力去改進,但效果仍然不令人滿意,尤其是在物體的邊界上。為了解決這個問題,研究者們開始將基于全連通條件隨機場(allconnectedconditions random field,CRFs)的RGB模型與CNN相結合,并進行了改進[15][16]。然而,這些方法很難應用于室內環境中顏色相近的物體。
3 系統設計
在本節中,我們將從兩個部分介紹我們的方法,視覺SLAM和語義分割。圖4是這個系統的簡圖。本文關注SLAM和語義分割,而不是g2o庫的優化。AR的圖像配準主要分為語義分割和視覺slam兩部分。
3.1 視覺SLAM
可以使用類似于depth camera Kinect的微軟Hololens進行圖像采集,得到每個像素的RGB和depth值。我們假設坐標系如圖5所示。
如圖5所示,o-xyz是圖像的坐標,o-xyz是攝像機的坐標。假設圖中的點為(u,v),對應的3D點為(x,y,z),則它們的坐標變換如式(1)。
首先,我們得到地圖的深度數據來代替Z,計算出x和y,其中f代表焦距,c代表中心點。然后,當我們得到圖像中每個點的位置時,由于相鄰幀之間的差異,我們可以計算出相機的位移和旋轉。
在圖6中,很容易看出這兩個數字已經轉向了一個特定的角度。但它會轉多少度呢?這個問題被稱為相機相對姿態估計。經典的算法是迭代最近點(ICP)。該算法需要兩個圖像的特征點。我們使用OpenCV進行特征點匹配。這樣就可以用PnP算法預測攝像機的姿態。如式(2)所示。
R是攝像機的姿態,C是攝像機的標定矩陣。R是連續變化值,C是穩定常數。一般情況下,只要有四組匹配點,就可以計算出模型。圖7為本次實驗的圖片,結果顯示相鄰兩幀檢測到的特征點有317個,出現大量誤匹配特征點。
理論上,只要不斷地比較新幀和舊幀,就可以解決定位問題。然后,把這些關鍵點放在一起,就可以生成地圖。當然,如果slam如此簡單,那就不值得學習超過30年。這主要是由于相鄰幀之間有大量相似的特征點,噪聲處理非常復雜,導致了不匹配。因此,我們提出了一種優化匹配誤差的方法。
3.2 語義分割
本方法需要圖像的語義信息的目的是當相鄰的幀特征點匹配時,合格的匹配點在同一個像素區域,根據語義分割信息進行篩選。語義分割主要采用全卷積神經網絡。全卷積神經網絡輸入一個圖像得到與原始相同大小的輸出圖像,輸出圖像具有像素到像素的映射,這是一個像素級的識別,輸出圖像中每個像素的輸入圖像在原始圖像上都有相應的標記,表示什么對象最有可能是對象或類別。
Jiang[17]提出了一個RGB-D FCN體系結構(DFCN)來生成每個像素上每個類的一元可能性的響應。如圖8所示,DFCN部分主要有兩個模塊:
(1)三個向下樣本池的卷積層,用于特征提取和深度融合;
(2)用于上下文推理和稠密預測的膨脹卷積層。
它使用了16層的VGG net第一層 Conv1到Conv4作為基本框架。該基本結構適用于RGB通道和深度通道的特征提取。在網絡的兩個分支的每次池化之前都將它們與元素求和。然后,在主分支的每個池化層之前添加融合層。為了防止函數映射的進一步減少,VGG-16中的第4池化層被替換為一次最大池化,而第五池化層被替換為一次最大池化和一次平均池化。為了使兩個分支中的值兼容并更易于訓練,它對深度通道進行了規范化,深度通道的初始范圍從0到65535到相同的彩色圖像范圍從0到255。
4 實驗評價
在我們的設計中,利用語義分割的輸出來限定兩個視頻幀之間的匹配點。具體來說,我們將這兩種技術的結合定義為式(3)。p和Q是連續幀圖像m和n中的特征點,R和t是旋轉矩陣和位移向量,PRGB-m和QRGB-n是三個通道在語義分割圖對應特征點上的RGB值。
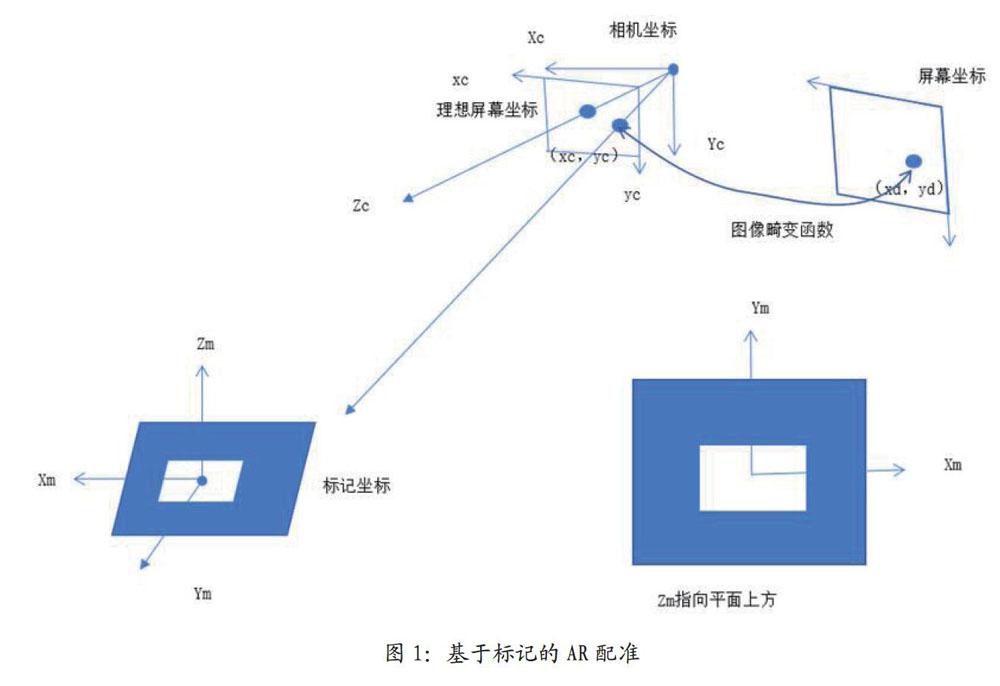
我們使用開放數據集SUN RGBD進行測試。它包含NYUv2圖像及其像素級語義注釋的數據。在TensorFlow框架中實現了DFCN-DCRF架構,并使用隨機梯度下降(SGD)進行端到端訓練。如圖9所示,左邊的RGB,深度在中間和右邊的語義分割和不同顏色代表了不同場景的對象。可見,目前顯著的目標分割效果是理想的。然而,小對象的分割并不理想
假設有兩個相鄰的幀圖像F1、F2和兩組對應的特征點,如式(4)所示。
我們的目標是算出位移矢量的旋轉矩陣R和t,如式(5)所示。
然而,在現實中,由于誤差的存在,不可能得到等號,所以我們通過最小化誤差來求解,如式(6)所示。
這個問題可以用經典的ICP算法來解決。其核心是奇異值分解(SVD)。我們將調用OpenCV中的函數來解決這個問題。接下來,我們將簡要介紹實現過程。由于我們需要匹配兩個圖像并計算它們的旋轉和位移關系,所以我們分三部分來做。首先,使用SIFT算法提取圖像特征點,用這些關鍵點周圍的像素計算描述子。其次,在前面的描述的基礎上,使用快速最近似近鄰搜索庫(FLANN)進行圖像特征匹配,返回DMatch結構,包括queryldx(上一個關鍵幀)、trainldx(下一個關鍵幀)、距離。然后根據經驗值將距離大于最小范圍4倍的點移除。最后,根據語義分割的結果,對匹配的特征點進行RGB值的過濾,保持顏色相同的特征點即相同的對象,反之亦然。最后,用PnP算法估計攝像機的姿態,得到旋轉矩陣和位移向量。
5 結果評價
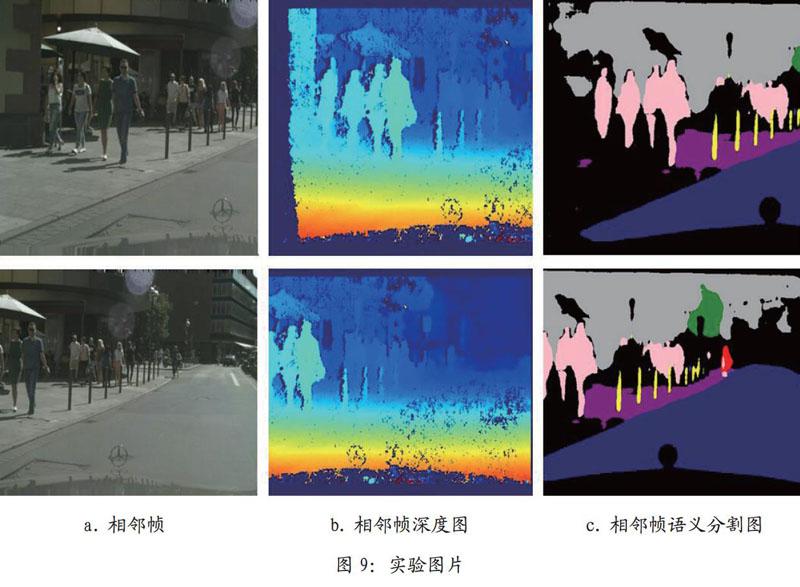
將視覺slam和語義分割相結合是利用視覺SLAM圖像處理方法得到的特征匹配結果,判斷下一幀匹配的特征點是否在同一目標像素區域內。如果不在同一區域內,則判斷為不匹配并刪除。圖7所示,這是只使用自然特征點為特征點匹配,很明顯,有很多錯配的結果,一些房子的匹配點誤以為傘,一些墻壁誤以為路面等等。在使用過本文新的方法后如圖10中,我們刪除一些相鄰幀處在不相同的像素區域內的匹配點,結果明顯好了很多。我們的方法在一定程度上提高了匹配的準確性,提高了增強現實圖像配準的準確性。
如表1所示,兩幀的特征點總數為317,兩個匹配特征點之間的最小距離為6.7像素。沒有語義信息的匹配特征點有114個,有語義信息的匹配特征點有87個。也就是說,當我們使用語義信息時,我們可以減少21個不匹配特征點。盡管進行了篩選,但仍然存在不匹配的可能性。
本文提出了一種結合語義分割的圖像配準方法來提高視覺SLAM的準確性,進而提高增強現實圖像配準的準確性。圖像特征匹配限制在同一物體在不同幀中的像素區域,以減少噪聲對特征匹配的影響。當然,當前的語義分割在場景中不能被充分識別。本文僅在一定程度上提高了SLAM匹配精度。隨著語義分割準確率的逐步提高,對階段的感知將逐步增強,用于AR的圖像配準技術將變得更加智能化。
參考文獻
[1]趙洋,劉國良,田國會,羅勇,王梓任,張威,李軍偉.基于深度學習的視覺SLAM綜述[J].機器人,2017,39(06).
[2]江宛諭.基于深度學習的物體檢測分$1[J].電子世界,2018,15(05).
[3]R.O.Castle,G.Klein and D.W,Murray,Combining monoSLAM withobject recognition for sceneaugmentation using a wearablecamera,Image Vis.Comput.28(11)(2010)1548-1556.
[4]S.Y.Bao and S.Savarese,Semanticstructure from motion,Comput.Vis.Pattern Recognit.,20-25 June 2011,Providence,R1 pp.2025-2032.
[5]N.Fioraio,G.Cerri and L.Di Stefano,Towards semanticKinectFusion,Lecture Notes inComputer Science(includingsubseries Lecture Notes in Arti cialIntelligence and Lecture Notes inBioinformatics)8157 LNCS(PART 2)(2013)299-308.
[6]R.F.Salas-Moreno,R.A.Newcombe,A.J.Davison and P.H.J.Kelly,SLAM++:Simultaneous localisation andmAPPing at the level of objects,inIEEE Int.Conf.Comput. Vis.PatternRecogni.23-28 June,Portland,OR
[7]A.Anand,H.S.Koppula,T.Joachimsand A. Saxena,Contextually guidedsemantic labeling and search for 3Dpoint clouds,Int.i.Robot.Res,32(1)(2013)19-34.
[8]L.Bo,X.Ren and D.Fox,Learninghierarchical sparse features forRGB-(D)object recognition,Int.J.Robot.Res.33(4)(2014)581-599.
[9]D.Maier,A.Hornung and M.Bennewitz,Real-time navigationin 3d environments based on depthcamera data,in 2012 12th IEEE-RASInt.Conf.Humanoid Robots(Humanoids2012),2012,pp.692-697.
[10]梁明杰,閔華清,羅榮華.基于圖優化的同時定位與地圖創建綜述[J].機器人,2013,35(04):500-512.
[11]王浩.基于視覺的行人檢測技術研究[D].遼寧工業大學,2018.
[12]嚴超華.深度語義同事定位與建圖[D].浙江大學,2018.
[13]付夢印,呂憲偉,劉形,楊毅,李星河,李玉.基于RGB-D數據的實時SLAM算法[J].機器人,2015.
[14]V.Badrinarayanan,A.Kendall and R.Cipolla,Segnet:A deep convolutionalencoderdecoder architecture forscene segmentation,IEEE Trans.Pattern Anal.Mach.Intell.39(12)(2017)2481-2495.
[15]L.-C.Chen,G.Papandreou,I.Kokkinos,K.Murphy and A.L.Yuille,Deeplab:Semantic image segmentationwith deep convolutional nets,atrousconvolution,and fully connectedcrfs,arXiv:1606.00915.
[16]J.Dai,K.He and J.Sun,Boxsup:Exploiting bounding boxes tosupervise convolutional networks forsemantic segmentation,in Proc.IEEEInt.Conf.Comput.Via.2015,pp.1635-1643.
[17]J. Jiang,Z. Zhang,Y. Huang andL.Zheng,Incorporating depth intoboth CNN and CRF for indoor semanticsegmentation,arXiv:1705.07383.
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49