基于路面識別的汽車穩定系統滑模控制?
2018-03-01 03:41:04王其東陳無畏汪洪波
汽車工程 2018年1期
王其東,劉 偉,陳無畏,汪洪波,黃 鶴
(1.合肥工業大學汽車與交通工程學院,合肥 230009;2.安徽理工大學機械工程學院,淮南 232001)
前言
汽車電子穩定系統(electronic stability program,ESP)是繼汽車防抱死系統(ABS)和牽引力控制系統(TCS)之后汽車主動安全控制技術的一次里程碑式的跨越提升。目前汽車穩定控制系統主要通過3種方式實現對汽車的穩定性控制:調整轉向角、調整垂向載荷和調整驅動制動力[1]。調整轉向角進行穩定性控制,適合車輪處于線性區域的汽車;調整垂向載荷進行穩定性控制,適合裝有主動懸架的汽車,且只有在很大的側向加速度或側傾角時才有效;隨著ABS和TCS的發展,通過差動制動或驅動產生附加橫擺力矩,是目前控制系統多采用的控制方法[2-4]。
汽車穩定性控制系統研究中的核心內容是系統的控制策略和結構。國內外在此方面進行了深入的研究,文獻[5]中應用混合靈敏度控制理論,通過合理選取加權函數,設計了基于模型的反饋控制器,將其離散化后,采用適當的最小化技術實現了其穩定性控制,但加權函數的計算較為復雜,且穩定性要求較高;文獻[6]中采用神經網絡預測方法,提高了汽車的橫擺暫態性能,但神經網絡內部模型結構的確定較為困難;文獻[7]中分析了ESP系統在低附條件下控制目標的選擇機理,開發了低附著路面汽車穩定控制器,但僅針對低附著這一種路面情況,而控制系統主要通過調節輪胎與路面之間的作用力,路面與輪胎之間力的傳遞受路面附著系數的制約,因此汽車主動安全控制策略的優劣很大程度上取決于能否充分利用當前路面附著系數。
當汽車在高附著路面行駛時,質心側偏角較小,可用橫擺角速度表征汽車的狀態。但當汽車在低附著路面行駛時,汽車易發生側滑,此時汽車質心側偏角迅速增大,輪胎側向力逐漸增大并達到飽和,使橫擺力矩與側向力趨于恒定值,此時駕駛員幾乎很難通過改變轉向盤轉角來改變橫擺力矩,汽車喪失轉向穩定性,要想控制汽車的穩定性變得很難[8]。因此,在低附著路面上更應嚴格限制質心側偏角,才能保證汽車的穩定性。而當汽車在中等附著路面行駛時,汽車的穩定性有時受限于過大的橫擺角速度,有時又取決于過大的質心側偏角,故可通過聯合協調控制,實時調節控制參數,通過兩個控制變量實現控制參數的最佳匹配,以適應不同行駛工況下汽車穩定性控制的要求。但現有的控制算法很少考慮路面條件的影響,通常將路面附著系數設為常量,算法只能在某種特定路面下獲得較好的控制效果,無法實現對不同路面條件的動態自適應。因此本文中采用卡爾曼濾波和遞歸最小二乘法相結合的方法對路面附著系數進行估算;在此基礎上,基于滑模控制理論采用指數趨近律分別設計了橫擺角速度滑模控制器、質心側偏角滑模控制器和兩者的聯合協調控制,并選取典型路面工況分別進行Matlab/Simulink-Car-Sim聯合仿真和硬件在環試驗,驗證所提出控制策略的有效性。
1 汽車動力學建模
1.1 整車動力學模型
CarSim軟件中的汽車模型是一個27自由度的高精度參數化整車動力學模型,將7大子系統(車身、空氣動力學、動力系、制動系、轉向系、輪胎和懸架)的特性都包括在內。根據研究需要,保留Car-Sim整車模型的主體,僅對動力系統、制動系統和轉向系統模型做適當修改,并嵌入自行設計搭建的控制器模型。而對其他子系統僅修改部分參數值,從而完成整車動力學模型的建立。
1.2 線性2自由度參考模型
當汽車的側向加速度小于0.4g,輪胎的側偏特性處于線性范圍內,線性2自由度汽車模型可很好地表征汽車的理想行駛狀態,因此可用來計算汽車期望的橫擺角速度和質心側偏角。2自由度汽車運動微分方程為

式中:β為質心側偏角;Iz為汽車繞z軸轉動慣量;γ為橫擺角速度;k1和k2分別為前、后輪胎的總側偏剛度;u為汽車縱向車速;δf為前輪轉角;a和b分別為質心至前、后軸的距離;m為汽車質量。
當汽車進入穩態時,橫擺角速度γ和質心側偏角β均為定值,此時β·=0,γ·=0,由式(1)可得期望的橫擺角速度和質心側偏角為,是表征汽車穩態響應的重要參數。
由于汽車的橫向加速度ay不能超過輪胎與路面的最大附著系數μ所決定的加速度,即ay≤μg,故理想的橫擺角速度和質心側偏角也將受到限制。穩態時汽車橫向加速度為

式中:γd為期望橫擺角速度;βd為期望質心側偏角;L為軸距,L=a+b;K為汽車穩定性因數,K=
式中R為轉彎半徑。這樣橫擺角速度就受式(4)不等式的限制:

因此由路面附著系數μ所確定的最大理想橫擺角速度和質心側偏角為

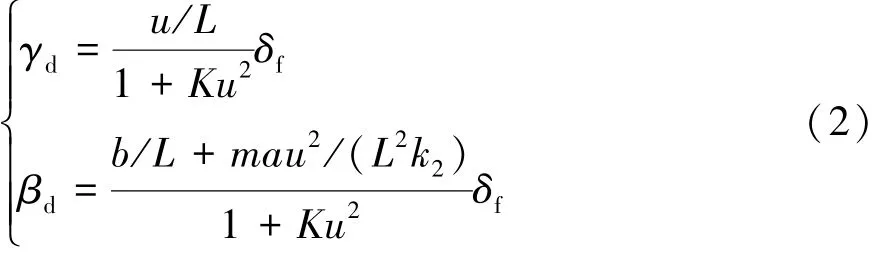
從而式(2)中期望的橫擺角速度和質心側偏角修正為

2 路面附著系數識別算法
刷子輪胎模型能比較準確地描述如飽和輪胎力和摩擦橢圓影響等輪胎的非線性特征且求解參數少于魔術公式等模型[9],本文中采用縱滑側偏組合刷子輪胎模型進行路面附著系數識別,識別框圖如圖1所示。

圖1 路面識別結構框圖
圖中:Fx和Fy分別為輪胎的縱向力和側向力,可利用卡爾曼濾波方法進行估算[10];Fz為輪胎的垂向載荷;Td為輪胎的驅動力矩;Tb為輪胎的制動力矩;α為輪胎的側偏角;κ為車輪滑動率。
刷子輪胎模型公式為

其中:


式中:Cx為輪胎縱滑剛度;Cα為輪胎側偏剛度;r為車輪滾動半徑;vω為輪心處的縱向速度。刷子輪胎模型需要辨識的參數包括 Cx,Cα和 μ,根據文獻[10]可知,Cx,Cα與輪胎尺寸、胎面寬度、充氣壓力和負載等因素有關,且在短時間內變化很小,可近似看作定值。而路面附著系數μ可采用遞歸最小二乘法進行估算。
首先,非線性的刷子輪胎模型可被寫成如下的形式:

式中:y為輪胎力的測量值,由卡爾曼濾波獲得,即 y = [Fx,Fy]T;f(k,μ(k)) 為刷子輪胎模型的表達式,其中μ(k)為輪胎模型參數;v1為相應的測量噪聲。
為滿足最小二乘法要求,將y(k)線性化,式(12)可近似寫為

其中

定義變量h(k)為

將式(14)代入式(15)中,可得

由此得到關于路面附著系數μ的近似線性化表達形式,然后進行遞歸最小二乘估算。設置遞歸最小二乘的價值函數為

式中λ為遺忘因子。最小二乘法的估算原則是使價值函數的導數為零,即將其值最小化。最小二乘法的估算表達式為

參數向量μ(k)可由新的觀測值h(i)進行更新,因此能被在線估算。其中的誤差協方差矩陣為

可由Sherman-Morrison方程遞歸計算:
將式(19)和(20)代入式(18),并設定狀態初值μ(0)和P(0),則遞歸最小二乘法的迭代過程為

在滑動率很小時,算法可能會出現較大的振蕩和不可預估的估算結果[11]。為避免這種錯誤的估算結果,設置一個滑動率門限κup,估算結果只有在大于滑動率門限時才進行更新,如果低于滑動率門限則保持上一個時刻的估算值不變:

路面附著系數估算算法的靈敏度由設定的滑動率門限決定,若門限值過大,則估算靈敏度不夠,估算值不能及時更新,而門限值過小,則滑動率較低時,估算值會出現較大的振蕩和不可預估的估算結果,本文中κup取0.08。
3 ESP控制系統設計
3.1 ESP控制系統結構設計
圖2為包含上層協調控制器和下層子系統控制器的ESP控制系統結構框圖。該系統是一個基于汽車運動狀態識別的協調控制器,根據汽車各個運動狀態和運動關系,可總結出如下的狀態識別流程:首先根據前輪轉角、橫擺角速度偏差和質心側偏角偏差來判斷汽車是處于不足轉向、過度轉向還是中性轉向;接著根據識別的路面附著系數,選取合適的控制策略。上層狀態識別器根據獲得的信息,進行分析判斷后,實時分配給下層子系統控制器控制參數和控制目標,使汽車在各種路況下都能穩定行駛。下層子系統控制器則根據誤差的大小確定所需產生的附加橫擺力矩ΔM。由于單輪制動對汽車沖擊和運動性能的影響較小,故參考文獻[12]選取單輪制動的方法來實現附加橫擺力矩的分配。

圖2 ESP控制系統結構
3.2 上層協調控制器設計
上層協調控制器是一個決策控制器,對下層控制器起決策、監控的作用。它相當于一個選擇開關:當汽車正常行駛時,上層協調控制器起到監控下層各控制器的作用,對主要指標(路面附著系數、橫擺角速度和質心側偏角)進行監控;當汽車出現失穩工況時,上層協調控制器發現異常后,對下層控制器發出決策指令,以確定下層子系統所采用的控制策略,其流程圖如圖3所示。

圖3 上層控制器控制流程圖
上層協調控制器的控制策略設計如下。
(1)根據文獻[13],確定汽車失穩時橫擺角速度準穩定公差帶|Δγ|=|γ -γd|=|c·γd|和質心側偏角準穩定公差帶|B1β+B2β·|<1,式中c=0.165,B1= 9.459,B2= 2.497。
(2)如果橫擺角速度偏差和質心側偏角偏差在穩定范圍內,則ESP系統不工作,上層協調控制器起監控作用,不發出控制指令。
(3)如果橫擺角速度偏差和質心側偏角偏差不在穩定范圍內,則上層協調控制器發出決策指令;此時,根據文獻[14],若路面附著系數小于0.35,則選取質心側偏角控制策略;若路面附著系數在(0.35,0.6]之間,則選取聯合控制策略;若路面附著系數大于0.6,則選取橫擺角速度控制策略。
3.3 下層子系統控制器設計
以線性2自由度模型為基礎,設計考慮控制變量變化率的高階滑模控制器,從而對整車失穩狀態施加附加橫擺力矩ΔM。因此,式(1)演變成加入附加橫擺力矩的2自由度模型微分方程:

3.3.1 橫擺角速度滑模控制器設計
橫擺角速度滑模控制器控制面的設計,須使汽車實際橫擺角速度跟隨期望橫擺角速度,保證輪胎始終處于線性特性范圍內。因此定義橫擺角速度滑模面為

對滑模面s進行1階求導,并將式(25)代入可得

采用指數趨近律的方法,結合式(27)可得橫擺角速度控制的附加橫擺力矩ΔMγ:

式中:εγ和kγ為橫擺角速度控制指數趨近律參數,且 εγ> 0,kγ> 0。
3.3.2 質心側偏角滑模控制器設計
質心側偏角滑模控制器控制面的設計,須使汽車實際質心側偏角始終跟隨期望質心側偏角,防止汽車側滑。假設實際值與理想值的誤差為零,即:eβ=β-βd=0,誤差變率=-定義質心側偏角滑模面為

對滑模面s進行1階求導,將式(25)代入可得

其中

同理,可得質心側偏角控制的附加橫擺力矩ΔMβ:

式中:εβ和kβ為質心側偏角控制指數趨近律參數,且 εβ> 0,kβ> 0。
在滑模控制器設計中,符號函數sgn(s)的存在使系統出現不連續的開關特性而造成抖振,本文中為削弱或抑制抖振,在控制器的設計中采用飽和函數sat(s/φ)代替符號函數sgn(s),保證在切換面附近控制輸入的光滑連續性[15]。飽和函數為

式中:φ為邊界層厚度,取0.05。
3.3.3 橫擺角速度和質心側偏角協調控制
當汽車在中等附著路面行駛時,汽車的穩定性有時受限于過大的橫擺角速度,有時又取決于過大的質心側偏角,必須同時對這2個變量進行控制,這樣可以解決單獨控制橫擺角速度時質心側偏角過大和單獨控制質心側偏角時不能很好跟蹤理想橫擺角速度的問題。因此須對橫擺角速度和質心側偏角進行聯合控制,實現汽車在各種工況下的穩定行駛。橫擺角速度控制器輸出的附加橫擺力矩ΔMγ和質心側偏角控制器輸出的附加橫擺力矩ΔMβ進行加權協調控制,得出最終的附加橫擺力矩ΔM:

式中n為協調控制加權系數。n的取值由路面附著系數決定:

式中:μ0和μ1為確定的路面附著系數,其值由文獻[14]確定。
3.3.4 滑模變結構控制系統穩定性分析
利用李雅普諾夫第二穩定判據對設計的控制系統進行穩定性分析,以橫擺角速度為例分析控制系統的穩定性。定義Lyapunov函數為

可得

將ΔMγ代入上式可得

因為kγ>0,所以L·≤0,表明系統穩定。同理可證質心側偏角控制和聯合控制時系統均穩定。
4 仿真分析和試驗驗證
4.1 仿真分析
為驗證所提出控制策略的有效性,在CarSim中建立整車動力學模型并與Matlab/Simulink進行聯合仿真,分析比較在不同路面附著系數下所設計的控制器對汽車極限工況的響應特性。整車參數見表1。

表1 整車參數表
仿真條件:根據 GB/T 30677—2014,采用初始車速 80km/h、幅值 1.5rad(85.95°)、頻率為 0.7Hz的正弦信號作為轉向盤轉角的輸入,驗證所設計的控制器在對應的路面附著系數下的控制效果,選取典型高、中、低路面附著系數下相同的極限工況進行仿真。
工況1:在CarSim中設定低附著路面的路面附著系數μ=0.2,汽車在此路面行駛的仿真結果如圖4~圖6所示。

圖4 低附著路面附著系數估算
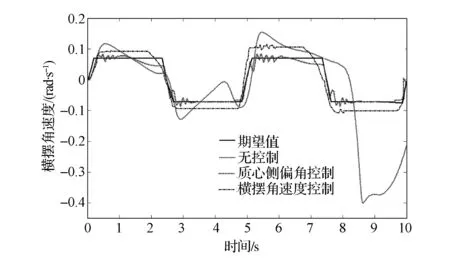
圖5 橫擺角速度響應曲線

圖6 質心側偏角響應曲線
圖4 為采用式(16)估算的路面附著系數值與CarSim給定值的比較,結果顯示估算值能夠在很短的時間內收斂到0.2附近,表明了所提出的路面附著系數估計算法的正確性。圖5和圖6分別為橫擺角速度和質心側偏角的響應曲線。可以看出,無控制時,橫擺角速度和質心側偏角出現較大變化,且在8.5s時達到0.4rad,遠遠超過此附著系數下汽車所允許的最大橫擺角速度和質心側偏角,表明汽車嚴重失穩并出現側滑。采取質心側偏角控制后各項參數均能很好地跟隨轉向輸入的變化而變化,穩定在期望值附近;而采取橫擺角速度控制后雖對汽車失穩有一定的控制作用,但偏離期望值較大,綜上分析表明,汽車在低附著路面上失穩時,采取質心側偏角控制比橫擺角速度控制效果好。
工況2:在CarSim中設定路面附著系數μ=0.5,汽車在此中附著路面上行駛的仿真結果如圖7~圖9所示。

圖7 中附著路面附著系數估算
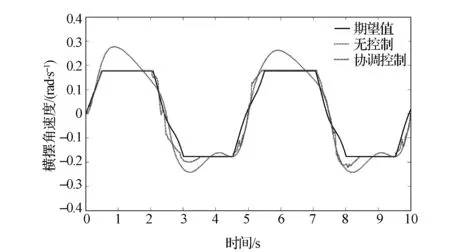
圖8 橫擺角速度響應曲線

圖9 質心側偏角響應曲線
由圖7可見,路面附著系數估算值幾乎在2s內收斂到給定值0.5左右,充分證明了該估計算法的有效性。由圖8和圖9可見,無控制時汽車出現過度轉向趨勢,且橫擺角速度在1s后達到0.3rad,導致汽車不穩定,而施加聯合協調控制后,汽車響應能較好地跟蹤期望橫擺角速度和質心側偏角。
工況3:在Carsim中設定高附著路面的附著系數μ=0.85,仿真結果如圖10~圖12所示。

圖10 高附著路面附著系數估算

圖11 橫擺角速度響應曲線
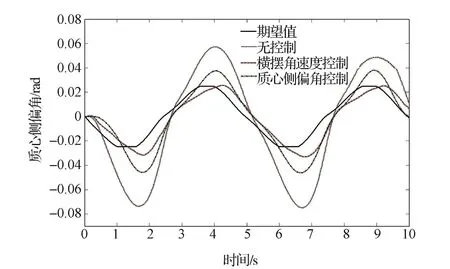
圖12 質心側偏角響應曲線
由圖10可見,高附著路面附著系數估算值能迅速收斂到CarSim給定值,充分證明了該估計算法的有效性和正確性。而由圖11和圖12可見,無控制時汽車出現不足轉向,而施加橫擺角速度控制后汽車的橫擺角速度和質心側偏角趨近期望值,汽車行駛在穩定范圍內,而采取質心側偏角控制后雖對汽車的不足轉向有一定的改善作用,但效果并不明顯,說明汽車在高附著路面上失穩主要是由過大的橫擺角速度偏差造成的,采取橫擺角速度控制比質心側偏角控制效果好。
以上仿真結果表明了所設計的路面附著系數識別算法的正確性;同時表明了基于路面識別所設計的不同控制器能夠很好地保持在對應路面附著系數下的汽車高速行駛穩定性,系統響應迅速。
4.2 硬件在環仿真試驗
采用硬件在環仿真試驗對提出的控制策略進行驗證,試驗平臺如圖13所示。

圖13 硬件在環試驗平臺
該試驗臺由上位機、下位機、接口系統、控制器和硬件系統5個部分組成。上位機是一臺普通PC機,在安裝的CarSim軟件中建立整車動力學模型,并在LabVIEW軟件中編寫ESP虛擬控制器程序;下位機是NI公司的PXI8196實時系統,運行上位機建立的整車模型和虛擬的ESP控制器;接口系統起承上啟下的作用,一方面將傳感器采集到的信號通過PXI實時系統輸入到虛擬控制器[16],另一方面將虛擬控制器控制輸出信號發送給控制對象。應用Lab-VIEW進行ESP虛擬控制器設計;硬件系統主要包括轉向機構、傳感器和執行器等。上位機、下位機、虛擬控制器和液壓單元驅動模塊四者通過網絡互連交互數據,上位機對仿真過程的狀態監控通過使用LabVIEW RT提供的網絡共享變量技術實現,其它信號通過信號線在硬件平臺之間傳遞,信號流程如圖14所示。
硬件在環試驗方案:由 NI公司開發的 Lab-VIEW-RT系統,在工控機Windows XP操作界面上運行LabVIEW軟件,實現硬件的在線控制、信號的實時采集處理和曲線的顯示等功能。硬件在環仿真測試開始前,在CarSim軟件內設置車輛參數和試驗工況,進行硬件在環仿真試驗。

圖14 硬件在環試驗平臺信號流程圖
(1) 采用車速 80km/h、幅值 1.5rad(85.95°)、頻率為0.7Hz的正弦信號作為轉向盤轉角輸入,設置路面附著系數為0.2,試驗結果如圖15~圖17所示。

圖15 路面附著系數估算

圖16 橫擺角速度曲線
由圖15可見,估算值介于 0.17~0.22之間,最大瞬態誤差約為15%,其余時刻的估算誤差均在10%以下,可較好地跟隨真實值,證明了估算方法可有效地估算出路面附著系數的變化趨勢。由圖16和圖17可見:不加控制時,汽車的橫擺角速度和質心側偏角的最大值已遠遠超過此路面附著系數所允許的最大值,汽車出現嚴重的失穩現象;施加控制后橫擺角速度和質心側偏角的幅值迅速減小,且處于穩定范圍內。

圖17 質心側偏角曲線
(2)采用車速80km/h、幅值1.5rad(85.95°)、頻率為0.7Hz的正弦信號作為轉向盤轉角輸入,在0-2.3s時,設置路面附著系數為0.8,在2.3s后的路面附著系數設置為0.4,轉向盤轉角幅值為1.5rad(85.95°),試驗結果如圖18~圖20所示。

圖18 路面附著系數估算

圖19 橫擺角速度響應曲線
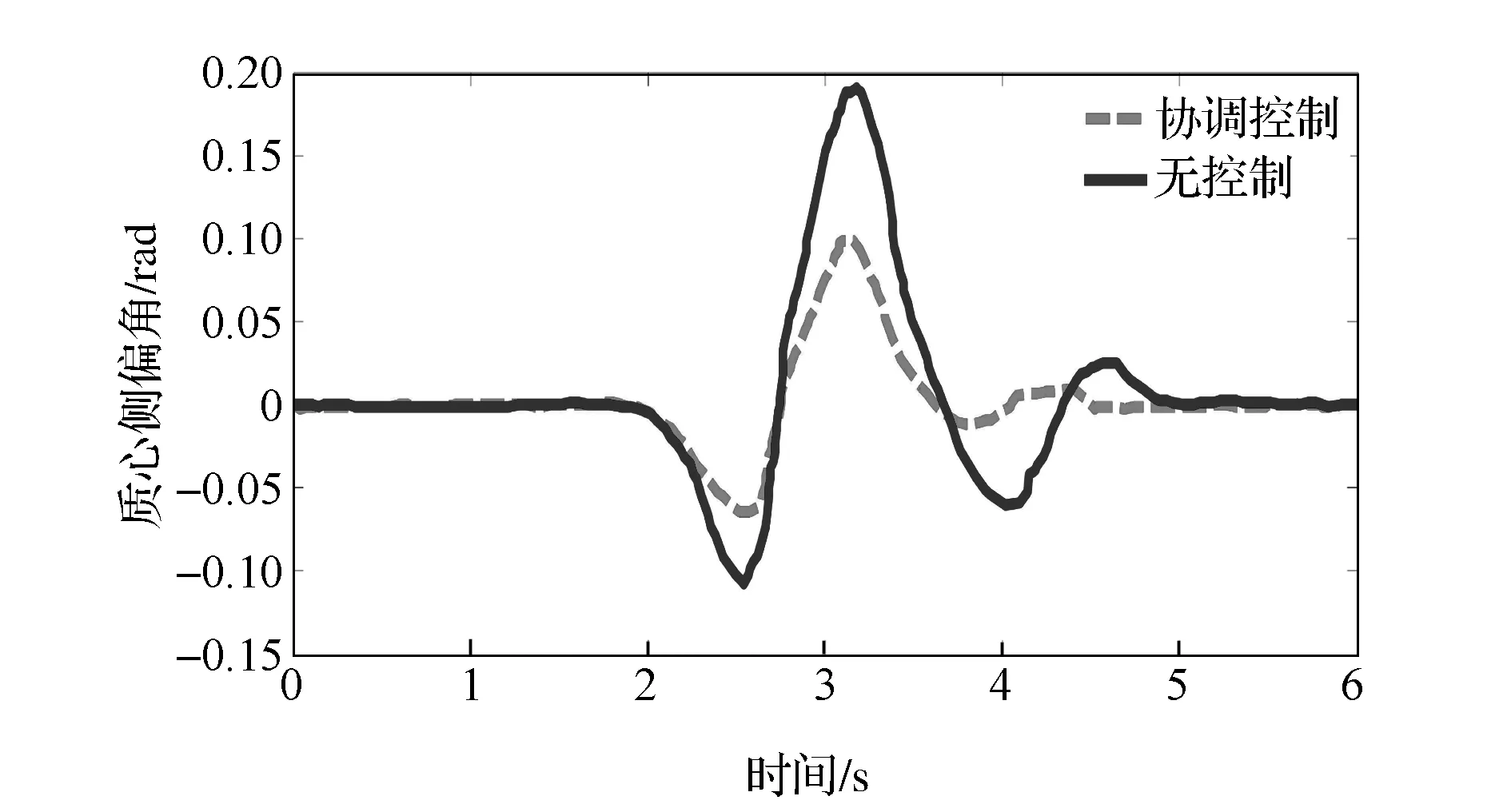
圖20 質心側偏角響應曲線
由圖18可見,當路面發生躍變時,估算值可較好地跟隨真實值,證明了估算方法可有效地估算出路面附著系數由大到小的變化趨勢,算法響應速率較快,估算結果較為準確。值得注意的是,當時間為2.3s時,估算值出現了較大波動,原因是滑移率的變化,之后的估算值趨于穩定,且穩定后的估算誤差在3%以內,說明此處的波動對整體估算結果沒有較大的影響。由圖19和圖20可見,采用ESP控制的幅值比未采用的幅值要小,且汽車行駛在穩定范圍內。硬件在環仿真試驗的結果驗證了仿真結果的正確性,表明所提出的控制器能使汽車在不同附著路面上失穩時的汽車橫擺角速度和質心側偏角的幅值得到較明顯的降低。
5 結論
(1)路面附著系數對汽車的穩定性具有重要影響,不同路面附著系數下汽車的動力學特性不同,汽車失穩的主要因素也不同。因此,引入路面附著系數識別對簡化汽車穩定性控制系統結構,提高控制精度具有重要作用。
(2)采用指數趨近律設計了滑模變結構控制器,采用遞歸最小二乘法進行路面附著系數估算,將識別的路面附著系數傳遞給控制器,控制器通過傳感器對汽車的運動姿態和駕駛員指令進行監控,當汽車失穩時,對比汽車實際行駛狀態與駕駛員期望狀態的誤差,計算附加橫擺力矩,同時根據識別的路面附著系數選取不同的控制策略。
(3)進行了典型工況仿真分析和硬件在環試驗,結果驗證了所提出的路面附著系數估算算法及ESP控制策略的有效性。試驗結果表明,硬件在環試驗是ESP控制器控制算法開發、調試和參數匹配的有效手段。
[1] 林程,彭春雷,曹萬科.獨立驅動電動汽車穩定性的滑模變結構控制[J].汽車工程,2015,37(2):132-138.
[2] 胡延平,陳無畏,劉翔宇,等.基于非線性直接橫擺力矩控制的ESP研究[J].汽車工程,2013,35(5):424-429.
[3] 夏長高,李心慶,鄭恩瑞.主動橫擺控制在車輛橫向穩定性中的應用研究[J].機械設計與制造,2015(4):35-38.
[4] 楊鵬飛,熊璐,張康,等.分布式電驅動汽車穩定性控制策略設計與試驗[J].機械工程學報,2013,49(24):128-134.
[5] CERONE Vito, MILANESE Mario, REGRUTO Diego.Yaw stability control design through a mixed-sensitivity approach[J].IEEE Transactions on Control Systems Technology, 2009,17(5):1096-1104.
[6] YANG T,SONG D D.Vehicle stability control study based on neural network predictive method[J].Applied Mechanics& Materials,2015, 734:295-298.
[7] 李亮,宋健,于良耀,等.低附路面汽車動力學穩定性控制系統控制策略[J].機械工程學報,2008,44(11):229-235.
[8] 徐明法.基于最優滑模控制理論的車輛穩定性控制策略研究[D].長春:吉林大學,2011.
[9] ZHAO J, ZHANG J, ZHU B.Development and verification of the tire/road friction estimation algorithm for antilock braking system[J].Mathematical Problems in Engineering, 2014, 2014.
[10] CHOI M,OH J J,CHOI S B.Linearized recursive least squares methods for teal-time identification of tire-road friction coefficient[J].IEEE Transactions on Vehicular Technology, 2013,62(7):2906-2918.
[11] SAVINKINA E N,SAKHANENKO A I.Enhancement of collision mitigation braking system performance through real-time estimation of tire-road friction coefficient by means of smart tires[J].SAE International Journal of Passenger Cars-Electronic and Electrical Systems, 2014, 18(1):69-77.
[12] LI J,YANG H.Fuzzy logic applied to yaw moment control for vehicle stability[J].Vehicle System Dynamics International Journal of Vehicle Mechanics& Mobility,2005,43(10):753-770.
[13] 邱磊.汽車ESP控制系統建模及仿真研究[D].重慶:重慶大學,2013.
[14] 趙林峰.全工況電動助力轉向系統建模控制及試驗研究[D].合肥:合肥工業大學,2009.
[15] 王先耀.基于滑模控制的線控轉向系統穩定性研究[D].淄博:山東理工大學,2012.
[16] 高明,趙楠,張榮蕓.基于LabVIEW的ESP硬件在環仿真實驗臺開發及仿真研究[J].汽車零部件,2013(6):53-56.
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
汽車與安全(2019年9期)2019-11-22 09:48:03
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
決策探索(2014年21期)2014-11-25 12:29:50
電測與儀表(2014年17期)2014-04-04 11:56:50