X-in-the-loop方法在燃料電池汽車動力系統測試上的應用?
2018-03-01 03:41:09牛文旭陳會翠高海宇
汽車工程 2018年1期
章 桐,牛文旭,陳會翠,宋 珂,高海宇
(1.同濟大學新能源汽車工程中心,上海 201804; 2.同濟大學汽車學院,上海 201804; 3.同濟大學中德學院,上海 200092)
前言
燃料電池汽車因其能量密度與能量轉化效率高和環境友好的特點,具有廣闊的發展前景。在燃料電池汽車開發過程中,動力系統的測試驗證是其中的重要環節。由于燃料電池汽車動力系統同時具有結構復雜、涉及部件眾多和模型驗證難度高等特點,現有的開發驗證方法難以完全滿足要求。因此,需要引入新的測試驗證方法,以完成燃料電池汽車動力系統的測試驗證工作。
1 燃料電池汽車動力系統測試現狀
針對燃料電池汽車動力系統測試驗證的要求,國內外學術機構和企業開發了不同規格和結構的燃料電池汽車動力系統測試平臺。其主要功能單元包括人機交互系統、燃料電池系統、其他電源系統、DC/DC轉換系統、驅動電機系統、測功機系統和數采系統等。
在小型燃料電池動力系統測試平臺方面,文獻[1]中開發了一套小型燃料電池汽車動力系統測試平臺,可完成整套動力系統的匹配和性能測試。文獻[2]中開發了一套燃料電池/超級電容雙能源測試系統,并分析比較了該系統中單一能源供電與雙能源供電的效果。文獻[3]中開發了一套5kW燃料電池/超級電容動力系統測試平臺,可完成動力系統性能測試。文獻[4]中開發了一套5kW燃料電池/蓄電池動力系統測試平臺,可完成動力系統動態性能測試和能量管理控制策略研究。
在燃料電池汽車動力系統虛擬測試方面,文獻[5]中采用CompactRIO嵌入式控制器與Lab-VIEW圖形化設計軟件來設計燃料電池的控制系統,使用NI CompactRIO控制器來監視和控制燃料電池機車和控制器局域網(CAN)總線的安全和運行。另外,文獻[6]中采用基于NI VeriStand的實時測試環境,Wineman Technology公司的INERTIA控制附加軟件和NI PXI的硬件測試系統,創建了硬件在環(HIL)測試系統,使其能仿真、控制、監測福特汽車公司開發的乘用車燃料電池動力系統模型。
文獻[7]中開發了一套燃料電池電動汽車動力系統綜合測試平臺,可完成30kW燃料電池/動力蓄電池動力系統測試,為動力系統的控制、性能的測試和工況的模擬提供了可靠的平臺,可完成系統的控制和部件的測試等。文獻[8]中開發了超級電容與燃料電池發動機混合動力系統測試平臺,可滿足額定功率為70kW的燃料電池發動機的動力系統測試的要求。另外,文獻[9]~文獻[11]中開發了針對燃料電池發動機、DC/DC變換器、電機和控制器等關鍵部件的測試平臺。
燃料電池動力系統包含了諸多不可測量或難以測量的量,這些量對于整個動力系統又是不可或缺的。利用若干可測量并通過合適的算法進行估計、推斷和預測出這些量,已成為解決上述問題的一種有效途徑。
考慮到燃料電池汽車動力系統的開發測試要求,現有燃料電池汽車動力系統測試平臺存在一定局限性。它主要以動力系統關鍵部件(驅動電機、燃料電池發動機等)測試臺架為主,缺少聯動設備。針對大功率車載燃料電池發動機/動力蓄電池構成的動力系統的測試平臺較少,無法滿足該類動力系統的開發測試需求。另外,若出現某一動力系統關鍵部件缺失的情況,現有測試平臺無法實現軟硬件的測試。
針對現有測試平臺的不足,須引入新的開發測試方法,開發新型燃料電池汽車動力系統測試平臺,以滿足開發測試的需要。
2 X in the Loop開發測試驗證方法
X in the Loop開發測試驗證方法由德國Karlsruhe Institute of Technology的Albers教授等學者提出,旨在針對日益復雜的整車系統,集成駕駛員和環境,是一種新型的整車開發和驗證方法[12]。X in the Loop中的X指待測試單元(Unit under test, UUT),它可以是模型(Model in the Loop,MiL)、軟件(Software in the Loop, SiL)或硬件(Hardware in the Loop, HiL)[13-14]。 X in the Loop方法可集成仿真模型和真實組件,并充分應用現有工具和方法,可充分考慮駕駛員和外界環境對于需求和開發過程的影響。該方法的核心是當測試中出現部件缺失的情況時,利用模型或代碼替代缺失部件,實現軟硬件結合測試。
X in the Loop方法中的Model in the Loop,即模型在環,意指被測對象的存在形式為模型,利用環內其他部件的軟件或硬件形式,對模型進行驗證和標定。模型在環的測試結果是軟件在環的重要參考。Software in the Loop,即軟件在環,意指被測對象的存在形式為代碼,利用實時仿真平臺與環內其他部件的軟硬件進行數據交互,從而對代碼的準確性進行驗證。Hardware in the Loop,即硬件在環,在傳統V模式開發中,指實際控制器與虛擬控制對象組成的仿真系統。在X in the Loop方法中,硬件在環的范圍由狹義的控制器擴展到廣義的硬件,即被測對象的存在形式為硬件,利用環內其他部件的軟硬件對被測硬件進行測試驗證。
典型的X in the Loop開發測試驗證方法在動力系統開發測試中的應用,包括以下組成部分:動力系統關鍵部件測試平臺,動力系統關鍵部件仿真平臺,駕駛員和環境仿真模擬系統,如圖1所示。
在該架構下,動力系統測試驗證平臺的結構更為靈活。對于測試對象為部件、子系統或系統等不同情況,充分利用模型庫中的整車和動力系統模型,構建出測試環,來完成其他部件或子系統缺失時的測試。

圖1 基于X in the Loop的動力系統測試平臺架構[13]
3 燃料電池汽車動力系統動態性能綜合測試儀器平臺
基于X in the Loop方法,參考典型的X in the Loop開發測試驗證方法在動力系統開發測試中的應用,并考慮燃料電池汽車動力系統測試的現狀和特點,文獻[15]中開發了一套燃料電池汽車動力系統動態性能綜合測試儀器平臺[15]。該平臺為一套綜合考慮溫度、濕度、壓力環境和NVH環境,進行燃料電池汽車動力系統及其關鍵零部件匹配和測試的多功能重大儀器。該測試平臺的組成框架如圖2所示。
該測試平臺包括燃料電池電堆測試模塊、燃料電池發動機匹配測試模塊、燃料電池汽車動力系統匹配測試模塊、燃料電池汽車動力系統儀器仿真模塊、NVH環境、溫度/濕度/壓力環境、綜合數據管理模塊和儀器主控系統。其中燃料電池汽車動力系統儀器仿真模塊包含了燃料電池汽車動力系統的主要部件模型,即燃料電池發動機模型、動力蓄電池模型和電驅動系統模型,以及模型運行硬件環境。燃料電池汽車動力系統匹配測試模塊包含動力系統測試的核心硬件設備,包括測功機和電源模擬/電子負載。綜合數據管理模塊包含測試所需工況信息、工況顯示系統和駕駛模擬臺架。儀器主控系統是整套測試平臺的中樞,可實現被測系統匹配、系統控制策略設定、整車模型設定和設備總體控制與監測。
由于該測試平臺提供了燃料電池汽車動力系統主要部件的模型與測試平臺,且儀器主控系統可實現不同軟硬件設備信息流的交互,因此,在該測試平臺上,可應用X in the Loop方法,實現動力系統集成測試。
構建合適的應用場景是X in the Loop方法的重點之一。由于本測試平臺集成燃料電池堆匹配測試模塊、燃料電池發動機匹配測試模塊和燃料電池汽車動力系統匹配測試模塊于一體,能實時聯動測試分析燃料電池動力系統的多項技術指標和性能指標,儀器綜合度高,因此構建合適且典型的測試場景,確定可在該平臺上實現的測試項目,是在該平臺上應用X in the Loop方法的重要工作。
在測試驗證中,主要涉及的模型包括燃料電池模型、蓄電池模型、DC/DC模型、電機模型、整車模型、控制策略模型和駕駛員模型等,各模型主要參數如表1所示。
4 X in the Loop方法在動力系統測試中的應用場景
4.1 Model in the Loop(模型在環)
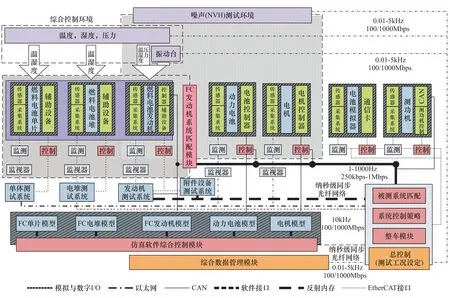
圖2 燃料電池汽車動力系統動態性能綜合測試平臺框架

表1 模型參數
Model in the Loop的測試驗證對象為模型,組成環的其他部分為硬件或軟件。在本測試平臺上,可利用燃料電池汽車動力系統儀器仿真模塊中的動力系統主要部件模型,作為測試驗證對象,模型運行環境為實時仿真器。當燃料電池模型/蓄電池模型作為測試驗證對象時,主控系統將燃料電池模型/蓄電池模型與電源模擬器相連,電源模擬器產生的電能由負載系統(電驅動系統或電子負載)消耗,從而實現燃料電池/蓄電池模型在環。當電驅動系統模型作為被測對象時,電驅動系統需求功率由工況決定,該需求功率直接由電源模擬器提供,由負載系統消耗,不受電源模型的電流電壓特性的約束。
圖3為基于該測試平臺應用的一種模型在環典型場景,即燃料電池模型測試驗證,該場景利用實時仿真器、電源模擬器和測功機等硬件和蓄電池模型、電驅動模型和整車模型等模型來實現燃料電池模型的驗證。測試儀器的綜合數據管理模塊中包含了測試所用的工況信息,它可由駕駛模擬器采集,或由綜合數據管理模塊后臺數據庫提供。測試儀器的主控系統的主要功能為任務調度、運行整車模型與控制策略模型和通信調理等。測試儀器的實時仿真器主要運行動力系統關鍵部件模型,包括蓄電池和燃料電池及其輔助系統等。電源模擬器的主要功能為根據模型數據提供電流電壓信號,并向電驅動系統輸出。其中燃料電池模型、蓄電池模型、電驅動模型和主控系統中的整車模塊(實現整車模型功能),構成了一個完整的燃料電池動力系統模型。

圖3 燃料電池模型測試驗證示意圖
主控系統調用數據庫中的工況信息,由主控系統的整車模塊計算行駛阻力。根據行駛阻力,由電驅動模型提出功率要求,并由燃料電池發動機模型給出功率響應,并發往電源模擬器。電源模擬器根據燃料電池發動機模型的輸出特性,產生模擬燃料電池發動機的電壓信號,該部分產生的能量由負載系統消耗。若負載系統為電機 測功機系統,則輸出實時轉速信號,由駕駛員模型根據期望車速和實際車速的差值調整電機轉矩。利用此類架構,可實現燃料電池模型的測試驗證,特別是燃料電池汽車動力系統的匹配測試,即在燃料電池缺失的情況下,利用模型與電源模擬器構成完整的動力系統。
與全仿真和純實物測試相比,使用模型在環的測試方法,可完成測試鏈中部分測試設備實體缺失情況下的測試驗證;在此過程中,可充分利用現有測試設備,將被測模型的輸出信號輸入相關測試設備中,實現模型信號的實時動態檢測。
4.2 Software in the Loop(軟件在環)
Software in the Loop的被測對象為代碼,組成環的其他部分為硬件或軟件。本測試平臺的實時仿真器配置有軟件在環平臺,可實現代碼驗證。
當被測對象為系統控制策略時,將系統控制策略生成代碼,利用軟件在環平臺,與動力系統模型連接,實現策略驗證功能,如圖4所示。當被測對象為系統控制策略和動力系統模型時,可將系統控制策略與動力系統模型均生成代碼,利用軟件在環平臺進行驗證。當被測對象為動力系統關鍵部件控制策略時(如電驅動系統),則將該部分控制策略生成代碼,其他部分仍為模型。

圖4 系統控制策略驗證示意圖
軟件在環測試可進一步實現模型的測試驗證,使待測模型所生成的代碼可應用于硬件。軟件在環測試實例中,代碼和模型均運行在實時仿真器中,在虛擬實時環境中將生成的C代碼用于控制部件模型,實現軟件在環平臺與Simulink仿真平臺的聯合仿真,借助實時仿真,改進和測試控制策略。
在X in the Loop方法指導下的軟件在環,可將代碼驗證平臺與動力系統測試設備連接,將被測代碼的輸出信號輸入相關測試設備中,實現實時動態檢測。由于實驗條件所限,基于該儀器測試平臺的軟件在環場景局限于包含被測代碼 模型和被測代碼 模型代碼兩類場景。
4.3 Hardware in the Loop(硬件在環)
Hardware in the Loop的被測對象為硬件,組成測試環的其他部分為硬件或軟件。在本測試平臺上,由于測試手段的軟硬件組合方式靈活,故可完成多種硬件在環測試驗證。
當被測對象為燃料電池發動機或動力蓄電池,即動力源部件時,可調用電源模擬器充當負載,或使用真實的電驅動系統充當負載。當被測對象為電驅動系統時,可利用真實的燃料電池發動機或動力蓄電池,或調用電源模擬器,作為動力源。測試所需其他部件可使用模型或實物。當被測對象為控制器時,該測試場景符合傳統意義上的硬件在環,除控制器為實體,其他部分均為模型。
圖5為基于該測試平臺應用的一種硬件在環典型場景,即利用實時仿真器、電源模擬器和測功機等硬件和燃料電池模型/蓄電池模型等模型來實現電驅動系統的匹配與性能測試。
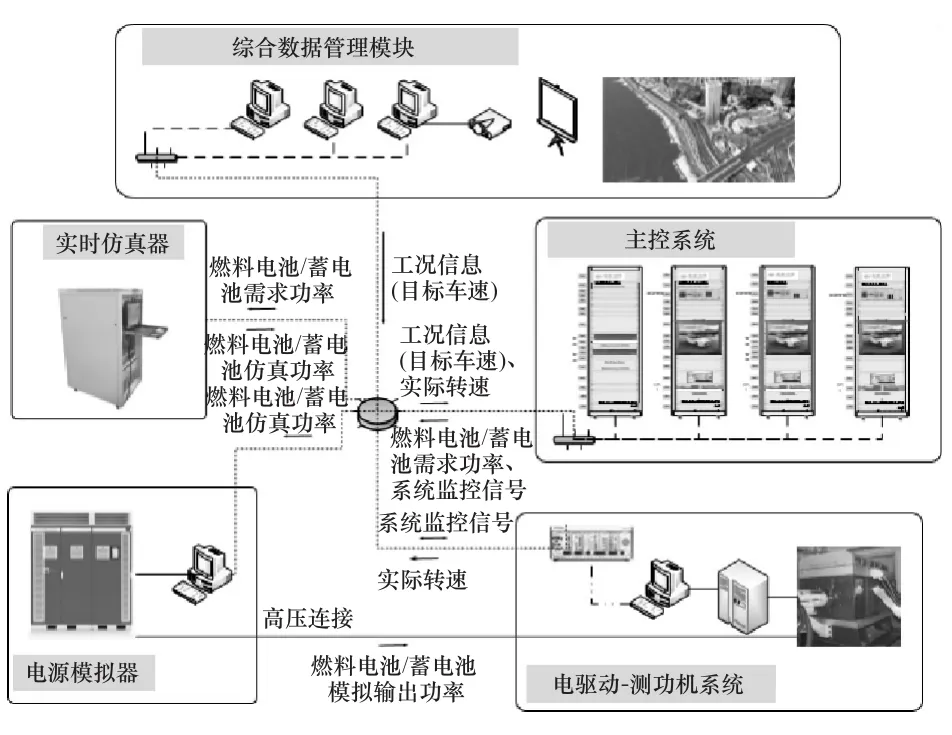
圖5 硬件在環 電驅動系統匹配與性能測試示意圖
在該類場景下,主控系統從綜合數據管理模塊調用工況信息,并利用系統控制策略模塊和整車模塊求得燃料電池發動機和蓄電池的需求功率,電源模擬器根據燃料電池發動機模型和動力蓄電池模型并聯后的特性產生電流電壓信號,并為電驅動系統提供能量,電驅動系統工作并拖動測功機。利用此類架構可在動力源部件缺失的情況下,實現燃料電池汽車動力系統電驅動部分的匹配與性能測試。
在X in the Loop方法中,硬件在環的定義由硬件僅指代控制器擴展為硬件指代被測對象,測試鏈中的其他部分可以為真實對象,也可用模型代替。因此利用X in the Loop方法可構建靈活的硬件在環測試系統,實現動力系統關鍵部件的匹配和性能測試。
5 X in the Loop應用實例
根據X in the Loop測試驗證方法的研究現狀和動力系統測試驗證的特點,基于已有設備設計了一套利用X in the Loop方法實現動力系統測試驗證的架構。
5.1 系統配置
該架構的組成如圖6所示。在該架構中,被測對象為電機,組成測試環的其他部分為綜合數據管理模塊(包括駕駛模擬器)、計算機、測功機和輔助系統等。其中,綜合數據管理模塊與駕駛模擬器相連,提供工況信息。計算機集成了整車模型和信號處理模塊,用以調用工況信息和處理接收到的信號。電機 測功機系統由兩個對拖電機組成,其中一個為被測電機,另一個為負載電機,被測電機的參數如表2所示。
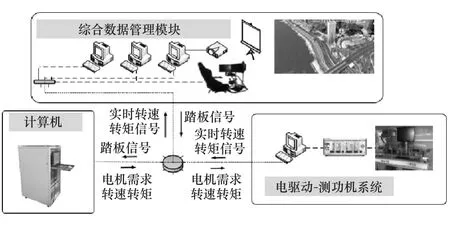
圖6 基于X in the Loop方法動力系統測試驗證架構
5.2 測試過程說明
綜合數據管理模塊提供工況信息數據,由駕駛員操縱駕駛模擬器的加速踏板和制動踏板,踏板信號再上傳至綜合數據管理模塊,計算機的整車模型和電機模型調用踏板信號,通過計算得到電機需求轉速轉矩,將轉速轉矩信號發送至驅動電機 負載電機一體化系統,該系統將實際轉速轉矩信息返回給綜合數據管理模塊,駕駛員根據實時轉速信息調整踏板行程,由駕駛員實時操縱駕駛模擬器,從而實現速度跟隨。
5.3 測試結果
圖7為該架構下的電機測試結果。由圖7可知,在X in the Loop方法中,該電機能基本滿足測試需求。

圖7 測試結果
6 結論
基于燃料電池汽車動力系統測試的現狀,針對現有測試平臺的局限性和無法實現軟硬件結合測試的特點,引入X in the Loop開發測試驗證方法,并基于該方法開發了一套燃料電池汽車動力系統動態性能綜合測試平臺,可實現模型在環、軟件在環和硬件在環等針對不同類型測試對象的匹配和性能測試。利用X in the Loop方法和測試平臺進行燃料電池汽車動力系統及其關鍵部件的開發測試,可明顯提高測試驗證的效率,縮短時間,降低成本,為燃料電池汽車系統開發提供了關鍵性的技術支持,具有廣闊應用前景。
[1] CORBO P,CORCIONE F E,MIGLIARDINI F,et al.Experimental assessment of energy-management strategies in fuel-cell propulsion systems[J].Journal of Power Sources,2006,157(2):799-808.
[2] THOUNTHONG P, RA?L S, DAVAT B.Control strategy of fuel cell/supercapacitors hybrid power sources for electric vehicle[J].Journal of Power Sources,2006,158(1):806-814.
[3] VURAL B,BOYNUEGRI A R,NAKIR I,et al.Fuel cell and ultra-capacitor hybridization:a prototype test bench based analysis of different energy management strategies for vehicular applications[J].International Journal of Hydrogen Energy,2010,35(20):11161-11171.
[4] SALAH M,MALLOUH M A,YOUSSEF M,et al.Hybrid vehicular fuel cell/battery powertrain test bench:design, construction,and performance testing[J].Transactions of the Institute of Measurement& Control,2016,39(9):1431-1440.
[5] ERICKSON T.借助NI LabVIEW和CompactRIO控制世界上最大的燃料電池混合動力機車[EB/OL].http://sine.ni.com/cs/app/doc/p/id/cs-15579#,2016-12-11/1016-12-13.
[6] 福特公司使用NI VeriStand和INERTIA附件部署燃料電池測試系統[EB/OL].http://sine.ni.com/cs/app/doc/p/id/cs-15071#,2016-12-11/2016-12-13.
[7] 謝長君,全書海,張琴,等.燃料電池混合電動汽車動力系統綜合測試平臺及測試方法:CN102494898A[P].2012.
[8] 張冰戰,趙韓,張炳力,等.超級電容與燃料電池發動機混合動力系統測試研究[J].汽車技術,2008(4):44-47.
[9] 劉振.輪轂電機驅動系統與燃料電池電動汽車的動力匹配[D].長春:吉林大學,2015.
[10] 金振華,歐陽明高,盧青春,等.燃料電池動力系統仿真及實時控制平臺開發[J].中國機械工程,2008,19(15):1879-1882.
[11] 楊挺.燃料電池汽車DC/DC變換器的虛擬儀器測試系統研究[D].上海:同濟大學,2008.
[12] ALBERS A,DüSER T.A new process for configuration and application of complex validation environments using the example of vehicle-in-the-Loop at the roller test bench[C].ASME 2010 International Mechanical Engineering Congress and Exposition,2010:807-816.
[13] ALBERS A, DüSER T.Implementation of a vehicle-in-the-Loop development and validation platform[C].FISITA World Automotive Congress,2010.
[14] ALBERS A,YOU Y,KLINGLER S,et al.A new validation concept for globally distributed multidisciplinary product development[C].Proceedings of 20th International Conference on Industrial Engineering and Engineering Management,Springer Berlin Heidelberg,2013:231-242.
[15] 章桐,左曙光,許思傳,等.用于燃料電池汽車動力系統的動態性能測試系統:CN103207084A[P].2013.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37