基于時(shí)頻圖像特征約簡(jiǎn)的柴油機(jī)故障特征提取新方法?
2018-03-01 03:41:10岳應(yīng)娟蔡艷平牟偉杰
汽車工程 2018年1期
岳應(yīng)娟,王 旭,蔡艷平,牟偉杰
(1.火箭軍工程大學(xué)理學(xué)院,西安 710025; 2.火箭軍工程大學(xué)五系,西安 710025)
前言
柴油機(jī)是非常復(fù)雜的機(jī)械系統(tǒng),所測(cè)的振動(dòng)信號(hào)屬于典型的非線性、非平穩(wěn)信號(hào)。基于振動(dòng)信號(hào)的柴油機(jī)故障診斷的本質(zhì)是模式識(shí)別問題,其中,如何從振動(dòng)信號(hào)中準(zhǔn)確提取出故障特征是問題關(guān)鍵。
時(shí)頻分析的方法能很好地反映信號(hào)時(shí)間和頻率的局部化信息,處理非線性、非平穩(wěn)的振動(dòng)信號(hào)時(shí)效果較好[1]。采用時(shí)頻分析是將獲得的時(shí)域信號(hào)轉(zhuǎn)化為時(shí)頻圖像,時(shí)頻圖像提供了足夠的信號(hào)故障分類信息,可通過分析圖像實(shí)現(xiàn)故障的特征提取和智能診斷[2]。如文獻(xiàn)[3]中通過灰度共生矩陣提取出時(shí)頻圖像的紋理特征;文獻(xiàn)[4]中通過提取時(shí)頻圖像的三維質(zhì)心與信息熵來進(jìn)行設(shè)備狀態(tài)識(shí)別;文獻(xiàn)[5]中提出從時(shí)頻圖像的形狀特征、灰度統(tǒng)計(jì)特征和紋理特征來綜合提取特征參數(shù)的思想;文獻(xiàn)[6]中提出對(duì)時(shí)頻圖像進(jìn)行分割并選取特征體質(zhì)心位置、面積、數(shù)目和熵作為特征參數(shù)。
然而,在利用圖像分析方法對(duì)時(shí)頻圖像進(jìn)行特征提取時(shí),大多是提取圖像的紋理特征、灰色統(tǒng)計(jì)特征或形狀特征。這些方法都忽略了時(shí)頻圖像中的局部特征關(guān)系,難以區(qū)分出在不同時(shí)刻具有相同頻率分量的時(shí)頻圖像。若將時(shí)頻圖像矩陣元素直接構(gòu)成特征向量進(jìn)行模式識(shí)別,又會(huì)由于矩陣數(shù)據(jù)維數(shù)過大帶來“維數(shù)災(zāi)難”,故有必要進(jìn)一步獲取蘊(yùn)含在時(shí)頻圖像內(nèi)部的低維特征。非負(fù)矩陣分解算法(nonnegative matrix factorization,NMF)[7]是一種局部特征提取方法,能將存放數(shù)據(jù)的矩陣維數(shù)進(jìn)行約簡(jiǎn)并保留關(guān)鍵信息。文獻(xiàn)[8]和文獻(xiàn)[9]中將NMF應(yīng)用于齒輪和軸承時(shí)頻圖像矩陣的低維局部特征提取,取得了很好的效果。但NMF算法存在的問題是計(jì)算效率過低,一定程度上限制了其在機(jī)械故障診斷領(lǐng)域的應(yīng)用。文獻(xiàn)[10]中提出了一種分塊非負(fù)矩陣分解算法(block NMF,BNMF),有效提高了NMF算法的計(jì)算效率。但分塊運(yùn)算將時(shí)頻矩陣分解為若干塊小矩陣,分別運(yùn)算后再進(jìn)行合成,特征矩陣的稀疏性又難以保證,不利于故障類型的識(shí)別。
針對(duì)以上問題,本文中提出一種新的時(shí)頻圖像特征約簡(jiǎn)方法(記為C-BSNMF方法)。利用三次卷積插值法將振動(dòng)譜圖像進(jìn)行維度壓縮,通過矩陣分塊計(jì)算方法結(jié)合稀疏非負(fù)矩陣分解,將壓縮后的圖像矩陣分解為一系列代表了不同時(shí)間和頻率范圍內(nèi)的時(shí)頻分量的基圖像的線性組合,直接提取出時(shí)頻圖像中的故障特征。實(shí)驗(yàn)驗(yàn)證表明,該方法能夠準(zhǔn)確地提取出柴油機(jī)氣門機(jī)構(gòu)的故障特征,并且大幅提高了特征提取的計(jì)算效率。
1 分塊稀疏非負(fù)矩陣算法
矩陣的稀疏計(jì)算由向量的稀疏度計(jì)算推演而來。給定一個(gè)向量x∈Rn,文獻(xiàn)[11]中提出使用L1范數(shù)與L2范數(shù)之比作為該向量的稀疏度測(cè)度:

一個(gè)向量的稀疏度介于0~1之間。圖1給出了對(duì)稀疏度的直觀理解,稀疏度越大,特征量就越少,主要特征就越明顯。

圖1 不同稀疏度下的稀疏向量
1.1 稀疏非負(fù)矩陣分解
SNMF是在稀疏編碼和NMF相結(jié)合的基礎(chǔ)上提出的[12]。SNMF通過對(duì)NMF中的基矩陣或系數(shù)矩陣施加稀疏約束來進(jìn)一步減少約簡(jiǎn)后信息的冗余。SNMF的本質(zhì)是一種矩陣分解和投影技術(shù),其基本原理如下。
對(duì)于非負(fù)觀測(cè)矩陣V,找到兩個(gè)合適的非負(fù)矩陣因子W和H,滿足:

式中:n為數(shù)據(jù)樣本的維數(shù);m為集合中數(shù)據(jù)樣本的個(gè)數(shù);r為特征維數(shù),一般情況下,r遠(yuǎn)小于n且滿足f(i+u,j+v)。
為了描述V≈W·H的近似效果,利用矩陣V與W·H間的K-L散度作為近似誤差,在NMF的基礎(chǔ)上加入了稀疏懲罰項(xiàng)α對(duì)應(yīng)的目標(biāo)函數(shù):

其對(duì)應(yīng)的優(yōu)化問題為
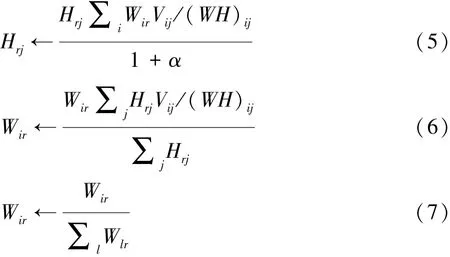
根據(jù)此目標(biāo)函數(shù),文獻(xiàn)[11]中推導(dǎo)出了W和H的更新規(guī)則,推導(dǎo)過程參照經(jīng)典的NMF基本算法,也即當(dāng)α=0時(shí)SNMF退化為經(jīng)典NMF算法。W和H的迭代公式為
1.2 分塊稀疏非負(fù)矩陣分解
分塊計(jì)算的思想最早在文獻(xiàn)[13]中提出。雖然SNMF算法符合“局部構(gòu)成整體”的認(rèn)知規(guī)律,但它開始是將矩陣看成整體而非局部之和。如果從開始就將矩陣視為“整體為局部之和”,對(duì)矩陣分塊各自分解后再將分解后的各子塊按原序拼接,而分解過程中矩陣的各塊之間并不運(yùn)算,則可以有效提高算法的收斂性能。本文中將這種分塊運(yùn)算方法應(yīng)用于SNMF,提出一種分塊稀疏非負(fù)矩陣分解算法(block SNMF,BSNMF),其基本原理如下。
將非負(fù)觀測(cè)矩陣按列平均分為一系列塊矩陣的形式 Vm×n=[V1V2… Vb],其中 Vi∈Rm×n0,b 為分塊數(shù),n0=n/b。對(duì)每一個(gè)塊矩陣按照式(5)~式(7)進(jìn)行迭代運(yùn)算,得到相應(yīng)的基矩陣和系數(shù)矩陣。

式中r0=r/b為塊矩陣的特征維數(shù)。按照式(9)和式(10)將分解得到的基矩陣和系數(shù)矩陣按原順序進(jìn)行合成,即可得到原非負(fù)觀測(cè)矩陣的基矩陣和系數(shù)矩陣。

1.3 算法計(jì)算復(fù)雜度分析
以算法中的乘法次數(shù)來表征計(jì)算復(fù)雜度。由式(5),在矩陣H的迭代計(jì)算中,SNMF算法的計(jì)算復(fù)雜度為

由式(6)和式(7),在矩陣W的迭代計(jì)算中,SNMF算法的計(jì)算復(fù)雜度為

一次迭代過程SNMF算法的計(jì)算復(fù)雜度:

對(duì)于本文中所提出的BSNMF算法,在Hi與Wi的迭代計(jì)算中,計(jì)算復(fù)雜度分別為

則一次迭代中BSNMF算法的計(jì)算復(fù)雜度為

比較式(13)與式(16)可知,BSNMF的計(jì)算量要比SNMF的計(jì)算量要小得多。
2 三次卷積插值法
雖然BSNMF算法可有效減少SNMF算法的計(jì)算量,但由于分塊計(jì)算時(shí)要滿足r0=r/b,使r0為正整數(shù),故分塊數(shù)b也要滿足(m+n)b<mn,對(duì)于較高維度的振動(dòng)譜圖像來說,算法耗時(shí)仍舊很長(zhǎng)。所以,考慮利用三次卷積插值法對(duì)每個(gè)振動(dòng)譜圖像進(jìn)行維度壓縮。
三次卷積插值[14]又稱為立方卷積插值,其本質(zhì)是利用采樣點(diǎn)的周圍16個(gè)點(diǎn)的灰度值作三次內(nèi)插運(yùn)算,如圖2所示。

圖2 待插值點(diǎn)與16個(gè)鄰近點(diǎn)排布
由連續(xù)信號(hào)采樣定理可知,若對(duì)采樣值用插值函數(shù)sinc(w)=sin(w)/(w)進(jìn)行插值,則可準(zhǔn)確地恢復(fù)原函數(shù),得到采樣點(diǎn)間任意點(diǎn)的值。三次卷積插值法實(shí)質(zhì)上就是利用一個(gè)三次多項(xiàng)式來近似理論上最佳插值函數(shù)S(w):
目標(biāo)值 f(i+u,j+v)可由如下插值公式得到:

其中:

三次卷積插值法帶有邊緣增強(qiáng)的效果,能較好地保持圖像的細(xì)微結(jié)構(gòu)。因此利用三次卷積插值算法與BSNMF相結(jié)合,能夠?qū)Ω呔S的振動(dòng)譜圖像矩陣進(jìn)行有效的特征約簡(jiǎn),同時(shí)具有較高的執(zhí)行效率,使算法的泛化性能得到進(jìn)一步增強(qiáng)。
3 柴油機(jī)氣門故障特征提取實(shí)例
3.1 實(shí)驗(yàn)流程
基于時(shí)頻圖像特征約簡(jiǎn)方法進(jìn)行柴油機(jī)故障特征提取和效果驗(yàn)證的流程如圖3所示。

圖3 故障特征提取及效果驗(yàn)證流程
實(shí)驗(yàn)對(duì)比方法設(shè)置如下。
(1)時(shí)頻圖像生成,分別用線性時(shí)頻分析中具有代表性的短時(shí)傅里葉變換(STFT)和非線性時(shí)頻分析中的魏格納分布(WVD)、偽魏格納分布(PWVD)、平滑偽魏格納分布(SPWVD)、喬威廉姆斯分布(CWD)以及參數(shù)化時(shí)頻分析方法中利用匹配追蹤算法(MP)與WVD相結(jié)合生成的時(shí)頻分布,共6種時(shí)頻分析方法產(chǎn)生振動(dòng)譜圖像來驗(yàn)證本文方法。以工況1的時(shí)頻分布為例,用6種分析方法生成時(shí)頻圖像,為便于進(jìn)一步的圖像分類與識(shí)別,將圖像轉(zhuǎn)化為維度為420×560的灰度圖的形式,如圖4所示。

圖4 工況1的6類時(shí)頻表示振動(dòng)譜圖
STFT描述的是信號(hào)的頻譜隨時(shí)間變化的情況,分辨率自適應(yīng)性差;其余5類分布都是描述的信號(hào)的能量密度隨時(shí)間變化的情況,WVD具有最佳的時(shí)頻分辨率,但是交叉干擾項(xiàng)嚴(yán)重,PWVD,SPWVD和CWD是通過加窗或引入核函數(shù)的方法來抑制WVD的交叉干擾項(xiàng),但都不可避免地降低了時(shí)頻分辨率;利用MP算法將信號(hào)分解為一系列單分量原子,再疊加每個(gè)原子分量的WVD,得到的時(shí)頻分布保持了WVD良好的時(shí)頻聚集性,并且消除了WVD中交叉項(xiàng)的干擾。
(2)特征提取,本文方法運(yùn)用三次卷積插值算法對(duì)時(shí)頻圖像矩陣進(jìn)行維度壓縮,用分塊稀疏非負(fù)矩陣分解算法對(duì)時(shí)頻表示特征約簡(jiǎn)(C-BSNMF特征提取)。將這種方法與現(xiàn)有的NMF,BNMF和SNMF 3種方法進(jìn)行對(duì)比。以特征提取時(shí)間來表征計(jì)算時(shí)間復(fù)雜度,對(duì)比方法的計(jì)算效率;以分類器的識(shí)別率來表征特征提取效果,對(duì)比方法的特征提取性能。分類器分別選擇模式識(shí)別性能較為穩(wěn)定的K-最近鄰分類器(KNNC)和在處理小樣本、非線性數(shù)據(jù)時(shí)效果較好的支持向量機(jī)(SVM)。
3.2 實(shí)驗(yàn)設(shè)置
以6135型柴油機(jī)為研究對(duì)象,實(shí)驗(yàn)平臺(tái)由柴油機(jī)、傳動(dòng)軸、電機(jī)和控制臺(tái)4部分組成,如圖5所示。取柴油機(jī)第2缸蓋表面振動(dòng)信號(hào)對(duì)柴油機(jī)進(jìn)行故障診斷,采樣頻率25kHz,轉(zhuǎn)速為1 500r/min,測(cè)試過程中,柴油機(jī)空載運(yùn)行。共設(shè)置了4種氣門間隙狀況,具體情況如表1所示。其中0.06,0.3和0.5mm分別對(duì)應(yīng)氣門間隙過小、正常和過大,開口表示在氣門上開4mm×1mm孔來模擬嚴(yán)重漏氣故障。共采集柴油機(jī)氣門4種故障狀態(tài)下各60組振動(dòng)信號(hào)樣本,總計(jì)240個(gè)。

圖5 實(shí)驗(yàn)平臺(tái)
3.3 實(shí)驗(yàn)工況分析
根據(jù)6135型柴油機(jī)的工作原理可知,引起缸蓋振動(dòng)的原因主要是氣體燃燒時(shí)產(chǎn)生的爆壓,氣門落座撞擊和排氣門開啟所引起的氣流沖擊等,鄰缸的各種振動(dòng)激勵(lì)源也會(huì)對(duì)缸蓋的振動(dòng)產(chǎn)生較大影響[15]。圖6示出進(jìn)排氣門開閉和點(diǎn)火時(shí)刻與曲軸轉(zhuǎn)角的關(guān)系。進(jìn)氣門開啟的角度在排氣上止點(diǎn)前20°CA附近,關(guān)閉的角度在進(jìn)氣下止點(diǎn)后48°CA附近;排氣門開啟的角度在做功下止點(diǎn)前48°CA附近,關(guān)閉的角度在進(jìn)氣下止點(diǎn)后20°CA附近;柴油機(jī)在0°CA點(diǎn)火。圖7和圖8給出了4種工況下振動(dòng)信號(hào)的時(shí)域和功率譜圖像。

表1 4種實(shí)驗(yàn)工況設(shè)置 mm
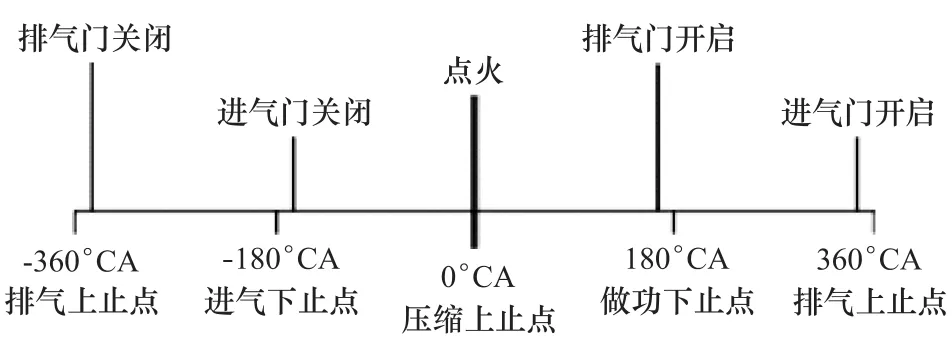
圖6 柴油機(jī)燃燒和氣門開閉轉(zhuǎn)角圖

圖7 4類工況時(shí)域波形
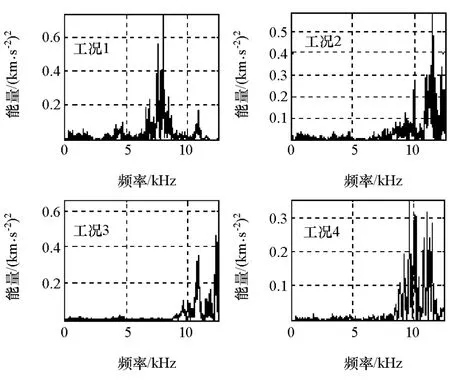
圖8 4類工況功率譜圖
從圖7的時(shí)域波形圖可以看出,氣門間隙狀態(tài)的變化對(duì)振動(dòng)信號(hào)有較大的影響,主要體現(xiàn)在幾個(gè)劇烈振動(dòng)分量產(chǎn)生與消亡的時(shí)刻發(fā)生了變化,各劇烈振動(dòng)分量的幅值變化也特別明顯。比較圖8中4種狀態(tài)下的功率譜圖可以看出,在正常狀態(tài)下,缸蓋振動(dòng)信號(hào)的能量主要集中在6.5~8.5kHz之間的高頻區(qū)域。在非正常狀態(tài),也即氣門間隙出現(xiàn)故障時(shí),主要能量向更高的頻段移動(dòng),一般集中在8.5~12.0kHz之間。
3.4 實(shí)驗(yàn)結(jié)果與分析
將每種工況的60組振動(dòng)信號(hào)中隨機(jī)選出30組信號(hào)組成訓(xùn)練樣本,其余信號(hào)組成測(cè)試樣本。第3.1節(jié)中所述6類時(shí)頻表征方法生成圖像的維度為420×560,利用三次卷積插值算法對(duì)時(shí)頻矩陣進(jìn)行0.1倍壓縮,得到維度為42×5642×56的6類時(shí)頻矩陣,如圖9所示。由于實(shí)際應(yīng)用中估計(jì)低維空間維數(shù)R十分困難,且依據(jù)應(yīng)用目的不同維數(shù)設(shè)置準(zhǔn)則也存在差別[16]。同時(shí),受分塊計(jì)算算法的限制,根據(jù)實(shí)際的矩陣維度情況,以16為步長(zhǎng),R從16到128取值,在不同的特征維數(shù)下分別迭代計(jì)算,并限定總的迭代次數(shù)為160(分塊運(yùn)算時(shí)每一個(gè)塊矩陣迭代10次)。
表2給出了4種算法對(duì)WVD時(shí)頻圖像進(jìn)行特征提取的計(jì)算效率,均不包含圖像載入時(shí)間。實(shí)驗(yàn)環(huán)境為Matlab R2012b,AMD A8處理器,CPU主頻1.90GHz,內(nèi)存為4GB,操作系統(tǒng)為Windows 7。

圖9 利用三次卷積插值算法壓縮后的6類時(shí)頻圖像

表2 4種方法對(duì)WVD時(shí)頻特征提取的耗時(shí)情況s
由表可見:從計(jì)算耗時(shí)的角度分析,縱向來看,用同一種矩陣分解方法時(shí),計(jì)算耗時(shí)隨選取的特征維數(shù)的增大而增加;橫向來看,分塊計(jì)算的方法能夠提高運(yùn)算效率,分塊數(shù)為16時(shí),BNMF的運(yùn)算效率較NMF提高了13倍左右,印證了第1.3節(jié)計(jì)算復(fù)雜度的推導(dǎo)。通過運(yùn)用三次卷積插值法對(duì)時(shí)頻圖像進(jìn)行維度壓縮,本文中所提的 C-BSNMF方法在SNMF的基礎(chǔ)上,運(yùn)算速度提高了1 500~2 000倍。
表3給出了不同特征維數(shù)下,運(yùn)用KNNC與SVM分別作為分類器,4種方法對(duì)WVD時(shí)頻圖像特征提取的識(shí)別效果。將生成的6種振動(dòng)時(shí)頻圖像分布用4種約簡(jiǎn)方法進(jìn)行處理,并用KNNC和SVM兩種分類器進(jìn)行模式識(shí)別,得到不同時(shí)頻圖像應(yīng)用不同約簡(jiǎn)方法的識(shí)別結(jié)果,如圖10所示。

圖10 6類時(shí)頻圖像識(shí)別正確率比較
由圖10可以看到,對(duì)于同樣的一批振動(dòng)數(shù)據(jù),在同樣的分類指標(biāo)下,采用的時(shí)頻分析方法不同,其識(shí)別正確率也不一樣。其中,以MP-WVD和WVD得到的時(shí)頻分布的識(shí)別正確率相對(duì)較高,最高識(shí)別率都達(dá)到了100%,而STFT和CWD分布的識(shí)別正確率相對(duì)較低。這表明,時(shí)頻分析方法對(duì)識(shí)別結(jié)果有一定的影響。WVD分布具有最好的時(shí)頻聚集特性,MP-WVD算法得到的時(shí)頻分布是將單分量原子信號(hào)WVD線性疊加,也保持了最好的時(shí)頻聚集特性。能量本身是一種二次型的表示,這種描述具有更好的邊緣特性和有限支撐性質(zhì)。這種良好的時(shí)頻聚集特性使各狀態(tài)間的差異性相對(duì)更為明顯。不論是用SVM還是KNNC作為分類器,都能保證很高的識(shí)別正確率。相比下,PWVD,SPWVD和CWD 3種分布雖然抑制了WVD分布的交叉項(xiàng)的干擾,但也降低了時(shí)頻分布的聚集性能,利用本文方法得到的特征提取效果反而不如WVD。

表3 4種方法對(duì)WVD時(shí)頻圖像特征提取效果對(duì)比
對(duì)比分析NMF,BNMF,SNMF和 C-BSNMF 4種方法的特征提取效果。以SVM作為分類器時(shí),可以看到,本文所提方法C-BSNMF的效果最優(yōu)(采用CWD時(shí)頻分布時(shí)除外);以KNNC作為分類器時(shí),本文所提方法的效果也最優(yōu)(采用PWVD時(shí)頻分布時(shí)除外),充分說明了本文方法更易獲取蘊(yùn)含在高維時(shí)頻矩陣內(nèi)部的低維特征。
4 結(jié)論
(1)將基于時(shí)頻圖像的特征約簡(jiǎn)提取方法應(yīng)用于6135型柴油機(jī)氣門機(jī)構(gòu)的故障自動(dòng)診斷中,取得了較高的識(shí)別正確率。說明該方法對(duì)于柴油機(jī)的復(fù)雜非平穩(wěn)振動(dòng)信號(hào)的時(shí)頻特征提取是有效的。
(2)結(jié)合三次卷積插值法與分塊稀疏非負(fù)矩陣分解算法的特征約簡(jiǎn)方法在低維特征提取效果和計(jì)算效率上較現(xiàn)有的幾種特征約簡(jiǎn)方法有很大程度的提高,為非線性、非平穩(wěn)信號(hào)的特征提取提供了一種有效的方法。
(3)利用時(shí)頻圖像特征約簡(jiǎn)的方法提取柴油機(jī)氣門機(jī)構(gòu)故障特征時(shí),基于匹配追蹤算法的時(shí)頻分布和魏格納時(shí)頻分布的特征提取效果要優(yōu)于其他幾種時(shí)頻表示方法,說明利用本文時(shí)頻圖像良好的時(shí)頻聚集特性能使特征提取效果更優(yōu)。此結(jié)果對(duì)時(shí)頻分析方法的研究方向有一定的借鑒意義。
[1] 張俊紅,王健,畢鳳榮,等.基于EMD和時(shí)頻分析的低振動(dòng)機(jī)體結(jié)構(gòu)優(yōu)化研究[J].振動(dòng)與沖擊,2014,33(3):117-121.
[2] FENG Zhipeng, LIANG Min, CHU Fulei.Recent advances in time-frequency analysis methods for machinery fault diagnosis:a review with application examples[J].Mechanical Systems and Signal Processing,2013,38(1):165-205.
[3] 劉建敏,劉遠(yuǎn)宏,江鵬程,等.基于包絡(luò)S變換時(shí)頻圖像提取齒輪故障特征[J].振動(dòng)與沖擊,2014,33(1):165-169.
[4] 李宏坤,周帥,黃文宗.基于時(shí)頻圖像特征提取的狀態(tài)識(shí)別方法研究與應(yīng)用[J].振動(dòng)與沖擊,2010,29(7):184-188.
[5] 蔡艷平,李艾華,何艷萍,等.基于振動(dòng)譜時(shí)頻圖像特征及SVM參數(shù)同步優(yōu)化識(shí)別的內(nèi)燃機(jī)故障診斷[J].內(nèi)燃機(jī)學(xué)報(bào),2012,30(4):377-383.
[6] 蔡艷平,李艾華,王濤,等.基于時(shí)頻譜圖與圖像分割的柴油機(jī)故障診斷[J].內(nèi)燃機(jī)學(xué)報(bào),2011,29(2):181-186.
[7] LEE D D,SEUNG H S.Learning the parts of objects by non-negative matrix factorization[J].Nature,1999,401(21):788-791.
[8] 李宏坤,陳禹臻,張志新,等.基于非負(fù)矩陣分解與主元分析的時(shí)頻圖像識(shí)別研究方法[J].振動(dòng)與沖擊,2012,31(18):169-172.
[9] LI Bing, ZHANG Peilin, TIAN Tao, et al.A new feature extraction and selection scheme for hybird fault diagnosis of gearbox[J].Expert Systems with Applications,2011,38(8):10000-10009.
[10] 潘彬彬,陳文勝,徐晨.基于分塊非負(fù)矩陣分解人臉識(shí)別增量學(xué)習(xí)[J].計(jì)算機(jī)應(yīng)用研究,2009,26(1):117-120.
[11] HOYER P O.Non-negative matrix factorization with sparseness constraints[J].Journal of Machine Learning Research,2004(5):1457-1469.
[12] LIU Weixiang, ZHENG Nanning, LU Xiaofeng.Non-negative matrix factorization for visual coding[C].Washington:Proc of IEEE Int Conf on Acoustics, Speech and Signal Processing,2003:293-296.
[13] SRA S.Block-iterative algorithms for non-negative matrix approximation[C].Eighth IEEE International Conference on Data Mining,2008:1037-1042.
[14] ZHOU D,SHEN X,DONG W.Image zooming using directional cubic convolution interpolation[J].IET Image Processing,2012,6(6):627-634.
[15] WANG Qinghua, ZHANG Youyun, CAI Lei, et al.Fault diagnosis for diesel valve trains based on non-negative matrix factorization and neural network ensemble[J].Mechanical Systems and Signal Processing,2009,23(5):1683-1695.
[16] GAO Huizhong, LIANG Lin, CHEN Xiaoguang, et al.Feature extraction and recognition for rolling element bearing fault utilizing short-time Fourier transform and non-negative matrix factorization[J].Chinese Journal of Mechanical Engineering,2015,28(1):96-105.
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
中國生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:21
計(jì)算物理(2014年2期)2014-03-11 17:01:44