發電設備在線數據的誤差處理
2018-03-02 00:13:23顧偉杜景琦
軟件 2017年9期
顧偉+杜景琦

摘要:監測水火電機組狀態,需要對水火電機組狀態在線測量數據進行預處理。主要就是判斷和校正誤差,通過改進觀測量變化率檢驗方法處理顯著誤差和通過基于SURE的小波閾值去噪法處理隨機誤差。
關鍵詞:顯著誤差;隨機誤差;觀測量變化率;小波閾值去噪
0 引言
為了建設云南省水火電機組狀態監測項目,需要參考大量電廠在線測量數據分析結果。設備的歷史運行數據除蘊涵了設備的有用狀態信息外同時還蘊涵了很多未知干擾信息,這些干擾信息對設備狀態預警的可靠性和精度具有重要影響。對在線測量數據的預處理,要考慮測量信息的一致性、精準性和完備性。電廠運行過程進行參數測量時,測量誤差的存在不可避免。在線測量數據的誤差可分為顯著誤差和隨機誤差兩大類。
1 顯著誤差的處理
顯著誤差包括T藝泄漏、設備故障、測量儀表零點漂移甚至測量儀表失靈等,以及不完全或者不正確的過程模型。實際過程中,雖然顯著誤差發生概率小,但是一旦出現顯著誤差將會嚴重破壞測量數據的品質及統計特性,導致狀態預警算法的失敗,因此顯著誤差的判別、剔除和校正是誤差處理的優先及重要環節。
目前有很多用于顯著誤差檢驗的方法,利用觀測量的變化率的大小來判斷顯著誤差就是其中之一。一般的利用變化率來檢測顯著誤差的基本思路為:通過分析過去時間序列的動態特性人為確定閾值,若當前時刻與前一時刻的觀測量的變化率(一般時間間隔為Is)大于閾值,則該時刻觀測值為顯著誤差點,否則為正常點。顯然,如何設定變化量閾值就是利用簡單的觀測量的變化率大小來檢測顯著誤差點存在的最大的難題。但設定的閾值通常不具備白適應性,閾值選取需要足夠地了解被檢測量的歷史數據。因此需對觀測量變化率檢驗法改進,并適用于時間序列的顯著誤差的檢驗和校正。
排除異常數據有四種較常用的準則,分別是狄克遜準則、格拉布斯準則、肖維勒準則和拉依達準則。由文獻指出在測量數據大于185時,建議采用拉依達準則。拉依達準則,是假設一組檢測數據只含有隨機誤差,對其計算處理得到標準偏差,按一定概率確定一個區間,認為只要超過這個區間的誤差,就不是隨機誤差而是顯著誤差,應將含有該誤差的數據剔除。將拉依達準則與傳統利用變化率來檢測顯著誤差結合來改進觀測量變化率檢驗法。
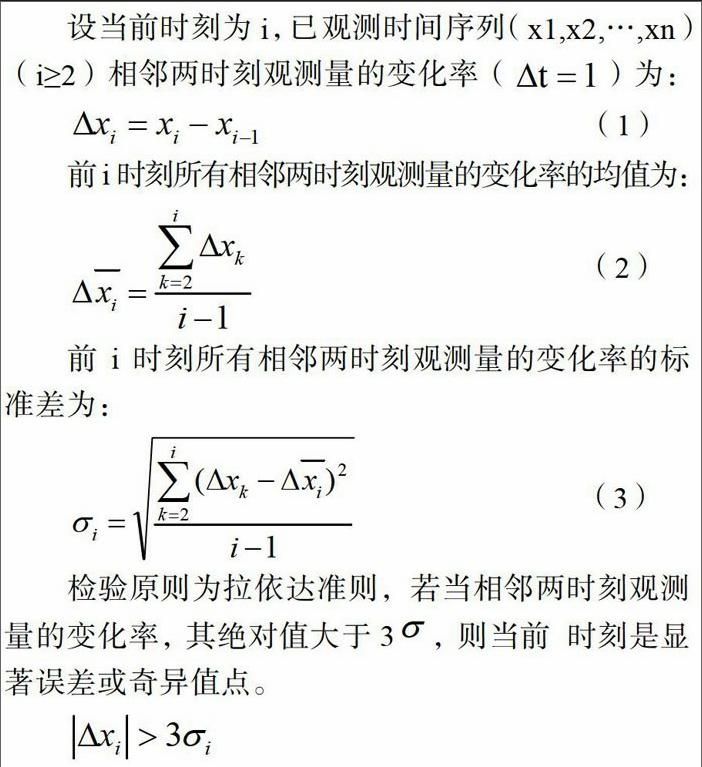
設當前時刻為i,已觀測時間序列(x1.x2.…,xn)(i≥2)相鄰兩時刻觀測量的變化率(△t=l)為:前i時刻所有相鄰兩時刻觀測量的變化率的均值為:
前i時刻所有相鄰兩時刻觀測量的變化率的標準差為:
檢驗原則為拉依達準則,若當相鄰兩時刻觀測量的變化率,其絕對值大于3σ,則當前時刻是顯著誤差或奇異值點。
根據以上基于觀測量變化率的顯著誤差(奇異點)剔除和校正,步驟如下:
Stepl:計算當前時刻的觀測時間序列的變化率標準差σ;
Step2:判斷/△xi/,I與3σi的大小,如果/x△i/<3σi,則為正常觀測值,否則為顯著誤差(奇異點);
Step3:若當前時刻為顯著誤差,判斷△xi,的符號。如果△xi>0,則該異常觀測點的校正值為xi=xi-1+σi,并替換;如果△xi<0,則該異常觀測點的校正值為xi=xi-1-σi,并替換。
Step4:采入下一時刻觀測值,重復Stepl-3的計算過程。
就火電廠一次熱風為例,對測量數據進行顯著誤差的檢驗與校正預處理過程。先從中選取樣本1000點,并含有顯著誤差的一次熱風溫度原始數據,然后經過改進觀測量變化率方法處理,結果如圖1。
對一次熱風溫度測量數據采用改進觀測量變化率檢驗方法進行顯著誤差的檢驗與校正,從圖1查驗具體顯著誤差校正后的數據比較困難,因此在表1給出6個明顯的校正點進行校正過程前后的數據,可以看出存在的顯著誤差基本被消除,并可以計算自適應閾值,使得含有顯著誤差的數據在去除后得到了及時校正。
2 隨機誤差的處理
隨機誤差是受不穩定隨機因素(例如不穩定的環境條件、不穩定的儀器和測量信號的噪聲等)的影響,一般無法避免,但符合一定的統計規律,因此可以采用數字濾波的方法來去除,例如維納濾波,卡爾曼濾波,自適應濾波等。隨著系統對精度要求的提高,近年來又提出了小波降噪技術。
目前小波降噪方法主要有小波變換模極大值法、小波系數相關法和小波閾值法等。在這三種方法中,小波閾值法實現最簡單,計算量較小,并具有良好的去噪效果。小波閾值法是在統計估計理論研究的基礎上提出的一種基于小波變換的收縮系數去噪方法,該方法認為目標信號對應的小波系數絕對值較大,但數目較少;而噪聲對應的小波系數是一致分布的,個數較多,但絕對值較小。基于這一思想,將絕對值較小的系數置為零,保留或收縮絕對值較大的系數得到估計小波系數,利用估計小波系數進行信號重構,就達到了信號去噪的目的,其中常用史坦無偏似然估計( stain unbiased riskestimation,SURE),基于SURE的小波閾值去噪法的基本原理為:
假設X=[x0,x2,..,,xN-1]T為含有噪聲信號的觀測量,即:
xi=si+ei,i=0,1,…,N-1)endprint
(4)
式中:si,ei分別為信號s和噪聲e在i時刻的值;N為信號長度。
消噪目的是根據觀測值X計算信號s的估計值s,使s與s的均方差( mean square error,MSE)最小。用均方值取代數學期望可得: 小波變換及反變換所用的小波基為正交小波基,此時上式可寫為:
式中:wj,ek為信號s在,尺度上第k個小波系數;Wj,ek為S對應的小波系數。
選取已經使用改進觀測量變化率檢驗方法校正后的一次熱風溫度測量數據進行基于SURE的小波閾值去噪法處理隨機誤差。考慮到選擇小波去噪的小波基和分解層次都影響小波去躁的效果。采取如下實驗方法:從3種常用的小波基haar、db8和sym6,依次選取一種小波基分別進行8個層次的分解與重構,以選擇最佳分解層次對于基于SURE的小波閾值去噪。
要比較小波去噪效果,小波去噪效果評價方法有以下幾種。
均方根誤差( RMSE)是用來原始信號和去噪后的信號的均方差。
式中f(/)表示原始信號,f(i)表示去噪后的信號,n表示信號長度。均方誤差體現了原始信號和去噪后的信號之間的偏差,因此均方誤差越小表示去噪效果越好。
信噪比( SNR)指系統中信號與噪聲的比例。powersignal,ek為原始信號能量,powernoise。為噪聲能量。信噪比增益( GSNR)指小波去噪后的信噪比與去噪前的原始信噪比的比值。
GSNR= SNRdn /SNRn
(9)
式中SNRdn表示去噪后的信噪比,SNRn表示原始信號的信噪比。信噪比越高、信噪比增益越大,表示濾波效果越好。
平滑度指標(r)是去噪后信號的差分數的方差根與原始信號的差分數的方差根之比。信號越光滑,平滑度指標越小,表示去噪效果越好
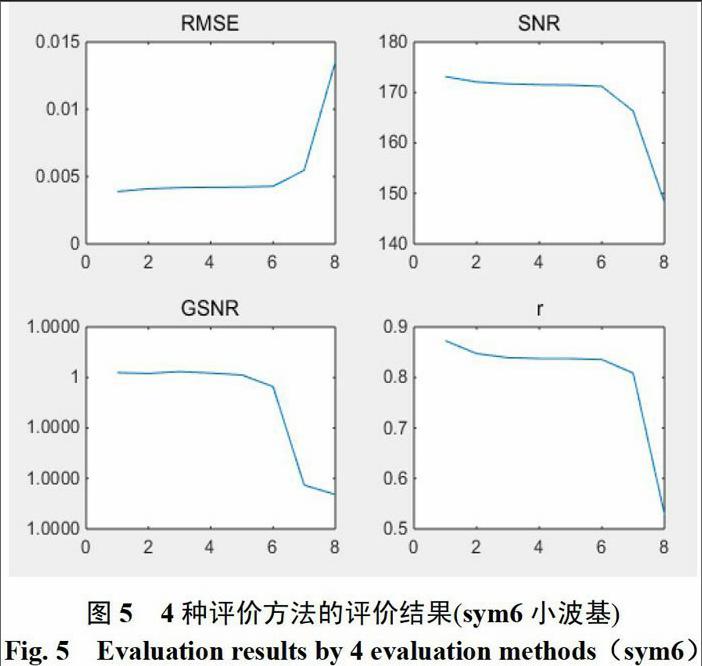
圖3展示了4種評價方法對haar小波基8個不同層次分解重構去噪結果的評價變化曲線。分析可以發現:(1)根據各評價方法的指標,沒有一種方法可以正確識別最佳的分解層次;(2)RMSE、SNR、GSNR和r都是單調遞增或遞減的,并沒有極值出現。綜合考慮發現采用haar小波基,分解層數為6時效果最佳。從圖4綜合考慮發現采用db8小波基,分解層數為4時效果最佳。從圖5綜合考慮發現采用db8小波基,分解層數為6時效果最佳。
比較小波基haar、db8和sym6的效果,發現db8和sym6都優于haar的效果,而sym6略優于db8。
3 結論
在實際應用上對數據誤差的預處理中,使用改進觀測量變化率檢驗方法校正顯著誤差,經仿真研究表明效果十分明顯。基于SURE的小波閾值去噪法處理隨機誤差,根據均方誤差、信噪比等多種評價指標選用小波基sym6分解層數為6效果較好。考慮到只選用一次熱風溫度做實驗,基于SURE的小波閾值去噪法處理隨機誤差選取小波基和分解層數可能存在偶然性,還需要通過其他電廠在線測量數據來進行進一步驗證。endprint