拖拉機前軸懸架參數優化設計
2018-03-03 03:50:26袁加奇周永清
噪聲與振動控制 2018年1期
袁加奇,范 駿,周永清
(1.江蘇開放大學 江蘇城市職業學院,南京 210036; 2.南京農業大學 工學院,南京 210031)
車輛在行駛過程中,車輪受到路面不平度激勵而激起的車體振動是較為劇烈的,尤其是輪式農用拖拉機經常行駛在較差的路面條件下。路面不平度所激起的拖拉機振動不僅會讓駕駛員身體感到不適,危害到駕駛員的身心健康,而且容易讓駕駛員產生駕駛疲勞從而降低工作效率,更嚴重的還會影響到拖拉機的操縱安全性,容易導致拖拉機事故的發生,所以對拖拉機的振動特性研究尤為重要[1–2]。
由于受到國內經濟發展及制造水平的制約,國產拖拉機的減振技術水平相對落后,也并沒有引起足夠的重視,目前我國生產的大多數拖拉機基本上是無懸架剛性結構,沒有任何的減振裝置,拖拉機的振動較為劇烈,乘坐舒適性遠遠低于道路車輛。而在歐美等發達國家,由于在拖拉機上同時安裝了駕駛員座椅懸架、駕駛室懸架、前軸懸架、后軸懸架以及全懸架等減振裝置,大大降低了拖拉機的振動強度,乘坐舒適性、行駛平順性和操縱穩定性等性能遠遠高于國產拖拉機。座椅懸架是拖拉機上的重要減振裝置,它是拖拉機與駕駛員直接接觸的部件,座椅懸架為駕駛員提供舒適乘坐環境和操縱穩定安全的工作條件[3]。前軸懸架是直接影響拖拉機前輪與地面接觸情況的部件,對于拖拉機的轉向性能和操縱安全有十分重要的作用。意大利Martelli等運用ADAMS動力學仿真軟件平臺對安裝前軸懸架輪式農用拖拉機的行駛安全性和乘坐舒適性進行了仿真研究分析,研究結果表明裝有前軸懸架的拖拉機可以改善拖拉機的行駛安全性和乘坐舒適性,但效果并不明顯,而且改善效果取決于拖拉機的實際行駛條件[4]。Mazhei等的研究結果表明,當拖拉機的前端懸掛農具工作時,安裝前軸懸架拖拉機的減振效果較為明顯,并且減振效果的好壞還取決于前軸懸架剛度系數和阻尼系數的匹配情況[5]。Lehtonen等的研究結果表明在拖拉機上安裝前軸懸架能夠明顯降低拖拉機的橫向振動強度,而對于拖拉機垂向和縱向的振動強度影響并不明顯[6]。
本文通過理論分析建立拖拉機的平面振動數學模型,運用MATLAB/SIMULINK仿真平臺建立拖拉機的振動仿真模型,主要研究拖拉機前軸懸架的剛度和阻尼參數對輪式農用拖拉機振動特性的影響,并利用MATLAB優化工具箱仿真優化設計前軸懸架的剛度系數和阻尼系數的匹配。為提高國產拖拉機的減振技術水平,降低拖拉機在較差路面條件下行駛時的振動強度以及為國產輪式農用拖拉機前軸懸架系統的參數匹配設計提供重要的理論研究基礎。
1 拖拉機振動模型的建立
輪式農用拖拉機振動系統的空間自由度較為復雜,為了簡化振動特性的理論研究,將拖拉機整體結構及懸架系統簡化為關于拖拉機中心面的左、右對稱結構,并且假設拖拉機的左、右車輪在同一路面不平度條件下行駛,只是前、后車輪的路面激勵存在一定的時間差△t,即拖拉機的后車輪受到的路面不平度激勵比前車輪受到的路面不平度激勵滯后一個時間差。考慮到拖拉機車輪和路面不平度激勵之間是弱耦合系統[7–8],理論研究和軟件仿真研究時可以忽略動彎沉量對拖拉機各部位振動特性的影響。
由于考慮到拖拉機整機系統結構的對稱性,可以將裝有前軸懸架和座椅懸架系統的輪式農用拖拉機結構簡化為二分之一整車的4自由度平面振動模型如圖1所示。
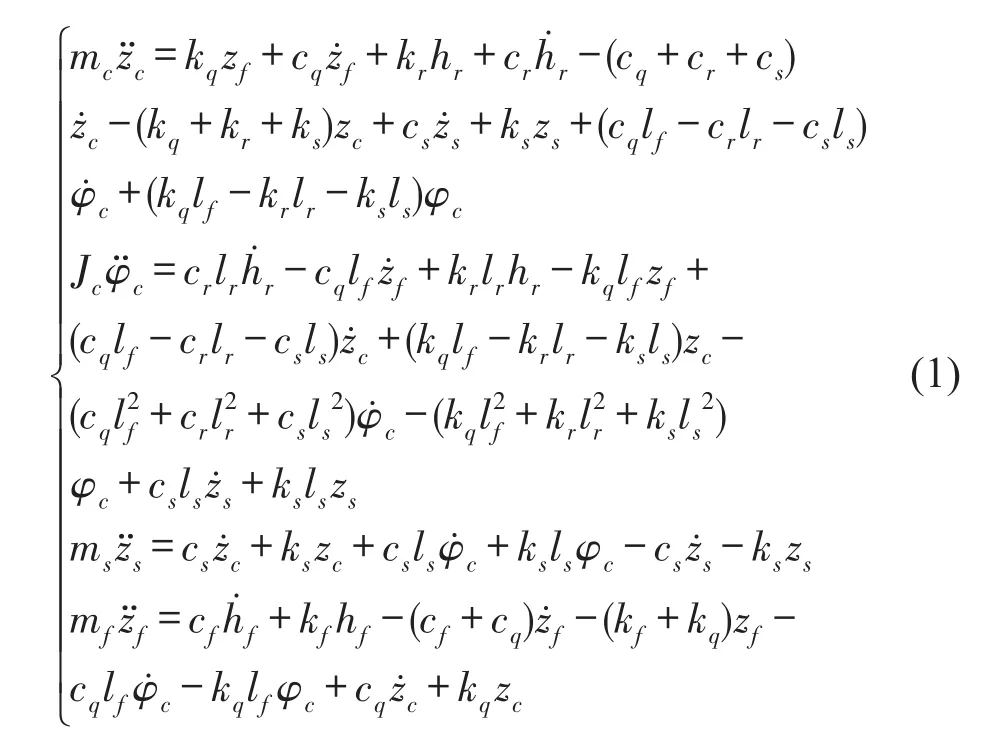
根據牛頓第二運動定律可得前軸懸架拖拉機4自由度系統的平面振動微分方程式(1)。
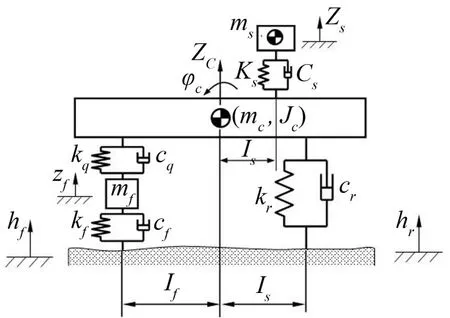
圖1 前軸懸架拖拉機4自由度平面振動模型
式中mc、ms、mf—拖拉機整車總質量、座椅懸架的簧上質量和前軸系統的質量,kg;Jc—拖拉機機身繞質心處的俯仰轉動慣量,kg?m2;kf、kr、ks、kq—前輪胎剛度系數、后輪胎剛度系數、座椅懸架剛度系數和前軸懸架剛度系數,N?m-1;cf、cr、cs、cq—前輪胎阻尼系數、后輪胎阻尼系數、座椅懸架阻尼系數和前軸懸架阻尼系數,N?s?m-1;lf、lr、ls—拖拉機前、后車軸中心位置和座椅質心位置至拖拉機機身質心處的水平距離,m;hf、hr—拖拉機前、后車輪受到的隨機路面不平度激勵的垂直方向位移,m;zc、φc、zs、zf—拖拉機機身質心處垂直方向位移、機身質心處俯仰方向角位移、座椅質心處垂直方向位移、前軸懸架垂直方向位移,m。
將式(1)的振動微分方程式轉換為矩陣形式
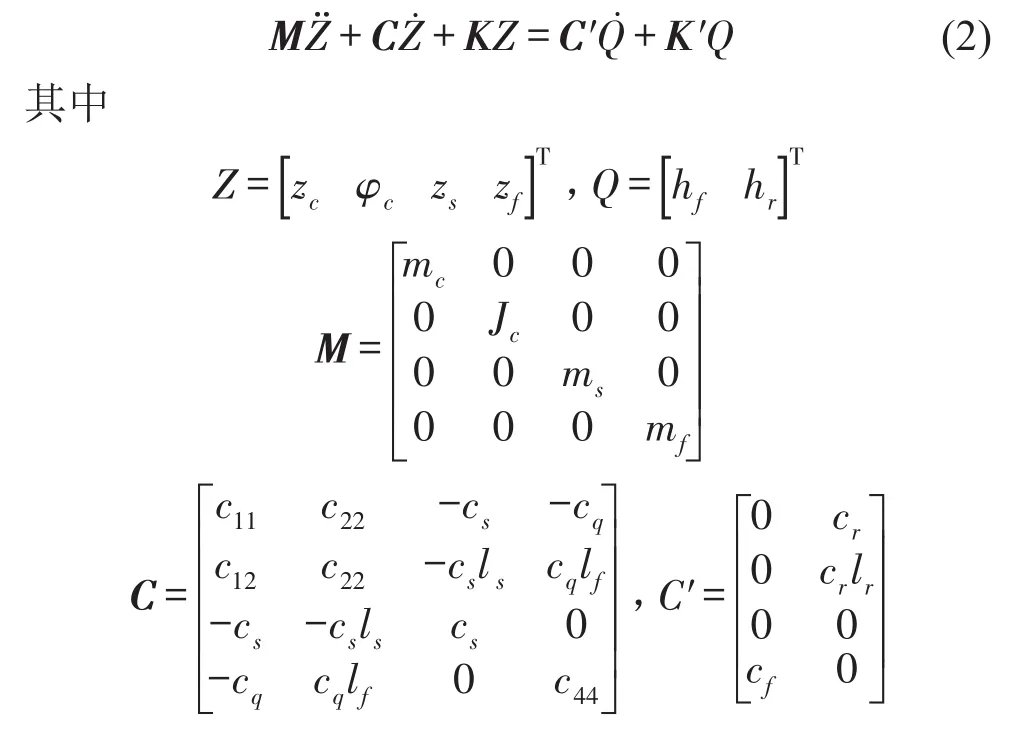
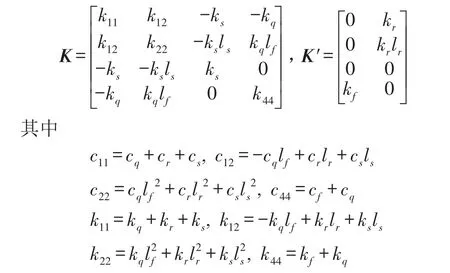
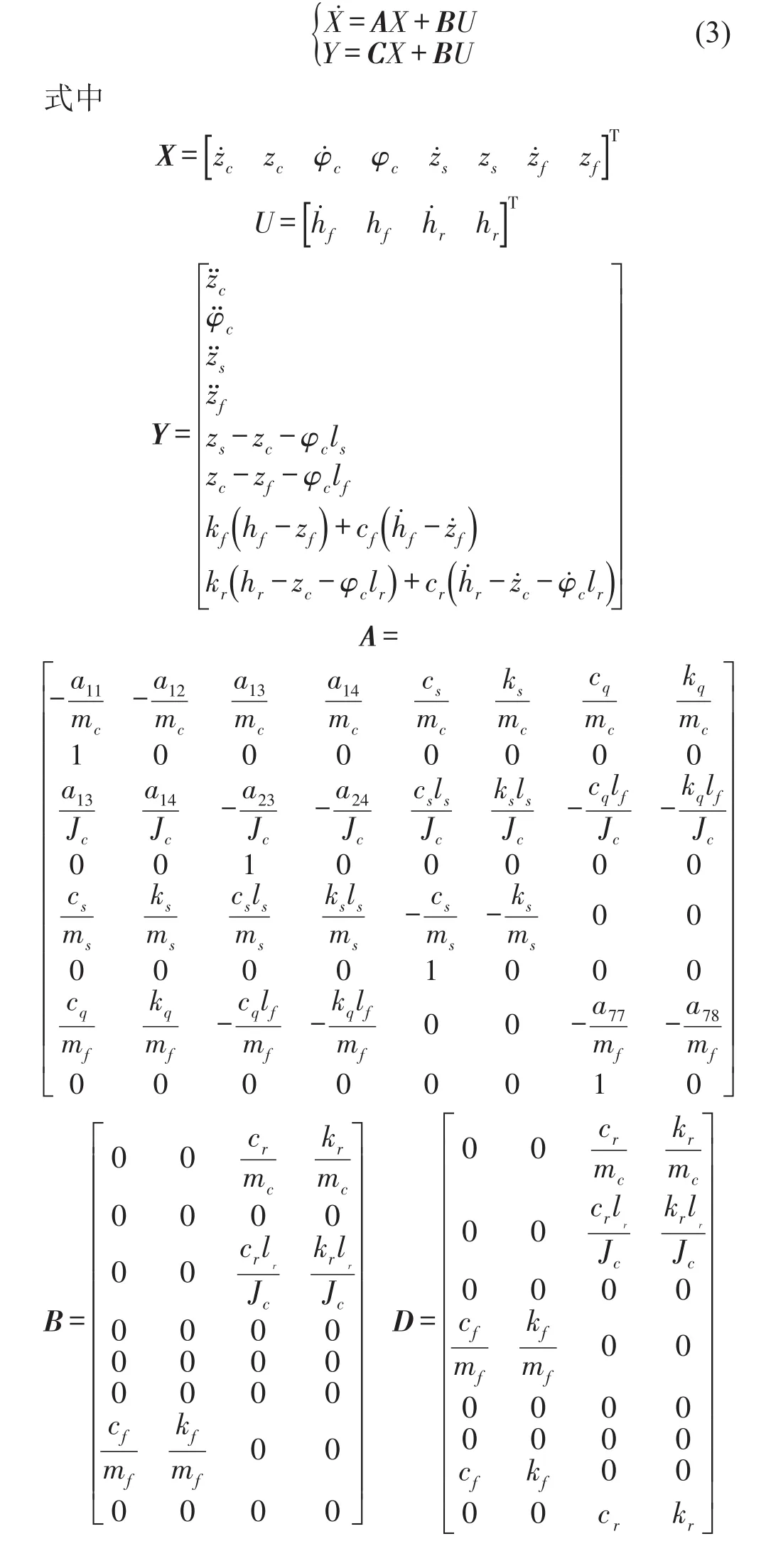
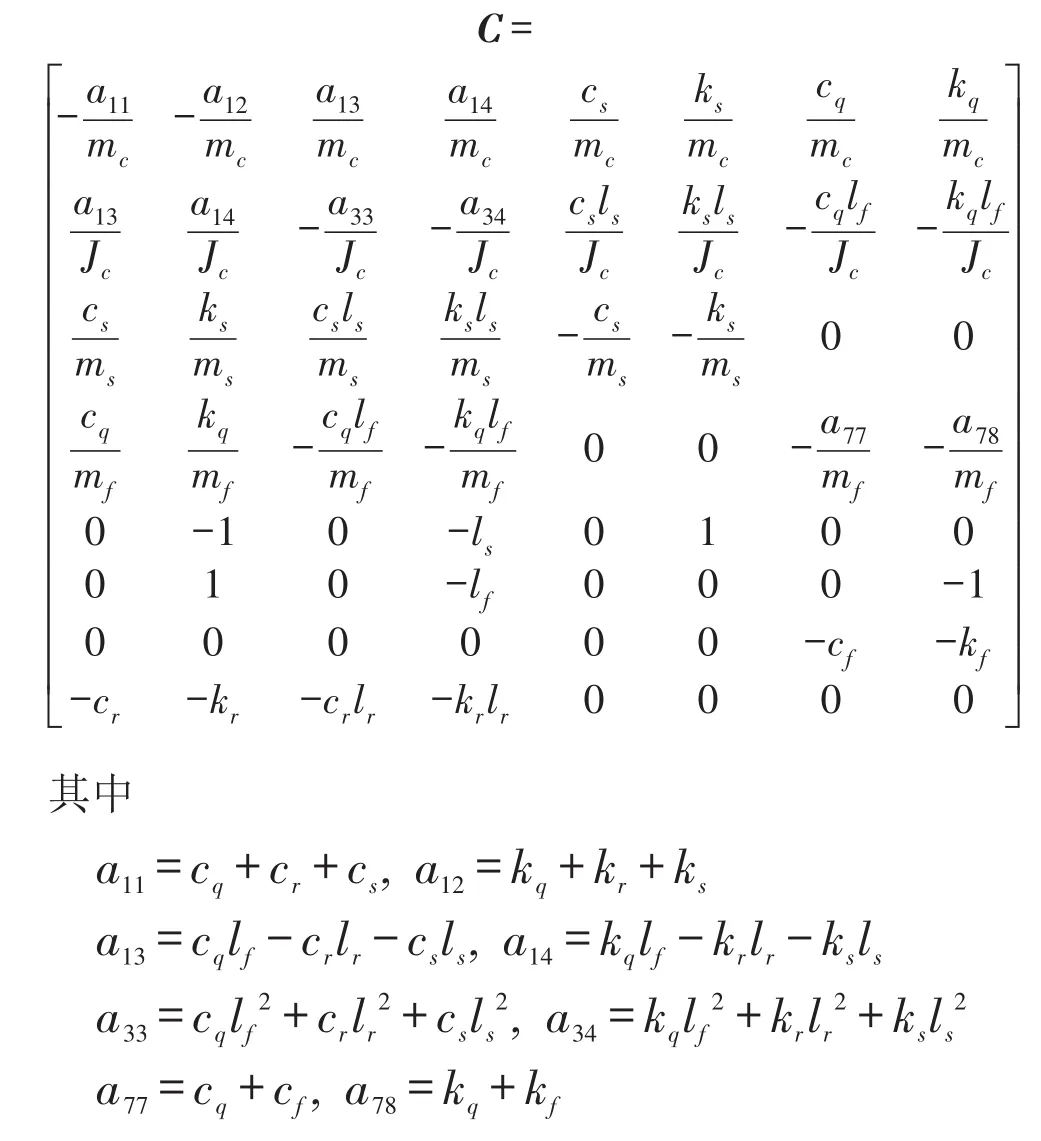
將式(2)改寫成控制狀態空間方程形式
2 拖拉機參數的獲取
為獲取常發CF700型輪式農用拖拉機的主要振動特性性能參數,在自主研制的測試試驗臺架上對拖拉機尺寸參數、質量參數、轉動慣量參數、輪胎剛度系數以及阻尼系數等參數進行測量、測試和計算[9–10],得到拖拉機的主要性能參數如表1所示。
依據文獻研究中關于車輛懸架偏頻及靜撓度的選擇原則[11–12],并結合常發CF700型輪式農用拖拉機的實際工作條件,選取拖拉機前軸懸架的偏頻為1.5~3.0 Hz,由車輛懸架的偏頻公式可得式(4)。

表1 CF700型拖拉機主要參數

式中m——前軸懸架的簧上質量,kg
由式(4)可得

根據車輛的振動理論研究和實際工程經驗,當路面不平度激勵等級為D級時,一般選擇懸架系統的阻尼比ζ=0.15~0.45,則可得拖拉機前軸懸架系統減振器的阻尼系數為

3 仿真模型的建立與驗證
3.1 隨機路面激勵模型
拖拉機行駛路面的隨機輸入是分析無懸架拖拉機在時域或頻域內的性能的重要參數。本文采用MATLAB/SIMULINK仿真軟件產生的積分白噪聲隨機路面模型作為路面不平度激勵,當拖拉機以恒定速度行駛時,拖拉機行駛速度的時域功率譜密度即為白噪聲信號,時域功率譜密度為常數4π2Gq(n0)n02v,因此隨機路面不平度激勵的輪廓可由時域功率譜密度為的白噪聲信號通過積分器產生得到,即

w(t)——單位白噪聲。
當拖拉機行駛的隨機路面不平度激勵等級為D級時,隨機路面的不平度系數為Gq(n0)=1 024×10-6m2,隨機路面不平度激勵信號的方差為n0=0.1 m-1,當拖拉機行駛速度為10 km/h時,利用MATLAB/SIMULINK仿真軟件構造出隨機路面不平度激勵的白噪聲信號模型,通過白噪聲信號仿真模型產生的隨機路面不平度激勵的垂直方向位移輪廓如圖2所示。
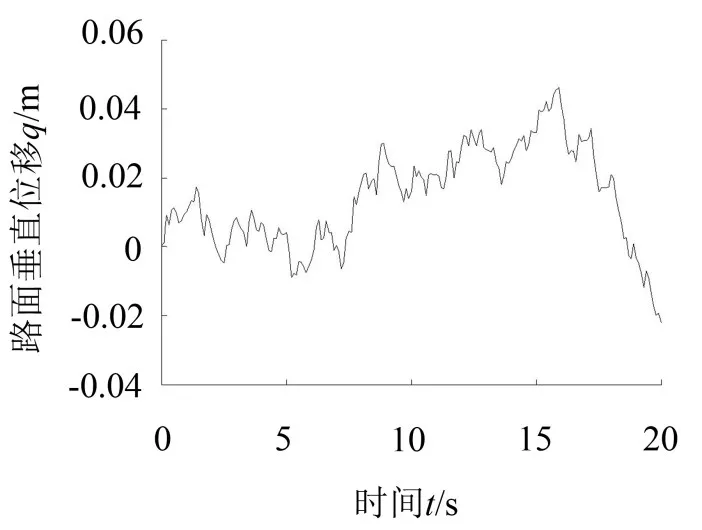
圖2 積分白噪聲隨機路面輪廓
3.2 仿真模型的驗證
為驗證所建立的拖拉機系統平面振動仿真模型的可靠性,在GB/T 10910-2004規定修建的100 m較平滑標準試驗路面跑道上進行拖拉機勻速行駛時的振動測試試驗。振動測試試驗時拖拉機在二檔位工況速度下行駛,通過測試測得拖拉機二檔位工況下行駛的前進速度為7 km/h。拖拉機振動測試系統包括用于采集并記錄振動測試信號的LMS SCADAS Mobile便攜式動態信號測量儀一臺。CA-YD-185TNC型壓電式單向加速度傳感器3個,單向加速度傳感器通過磁盤吸力分別安裝固定在拖拉機前軸中心位置正下方、后軸中心位置正下方以及座椅底板中心位置處。測試用安裝LMS測試軟件的筆記本電腦一臺用于分析振動信號。拖拉機振動試驗測試系統以及加速度傳感器在拖拉機機身上的安裝部位如圖3所示。

圖3 拖拉機振動測試系統
圖4所示為輪式農用拖拉機各部位垂直方向位移幾何關系的平面模型,可以得到拖拉機前軸中心位置的垂直方向位移zf、后軸中心位置的垂直方向位移zr和拖拉機機身質心處的垂直方向位移zc存在以下關系式(6)所示[13]。

式中zf—拖拉機前軸中心位置的垂直方向位移,m;zr—拖拉機后軸中心位置的垂直方向位移,m;zc—拖拉機機身質心位置的垂直方向位移,m;zs—座椅底板位置的垂直方向位移,m。lsr—座椅質心處至后軸中心位置的水平距離。
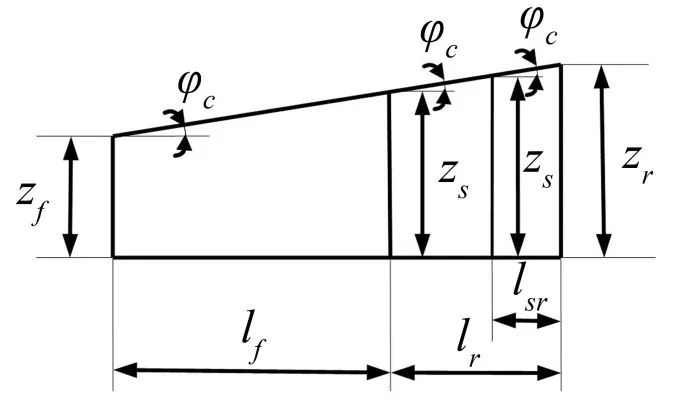
圖4 垂直位移的幾何關系
由于拖拉機機身俯仰方向的振動角位移φc較小,可近似 tanφc≈φc,則式(6)可簡化寫為

由式(7)可知,通過振動試驗測得拖拉機前、后車軸中心位置的垂向振動加速度可近似計算出拖拉機質心處垂向振動加速度和俯仰方向角振動加速度。拖拉機各部位的振動測試試驗結果與計算結果見圖5-圖8。
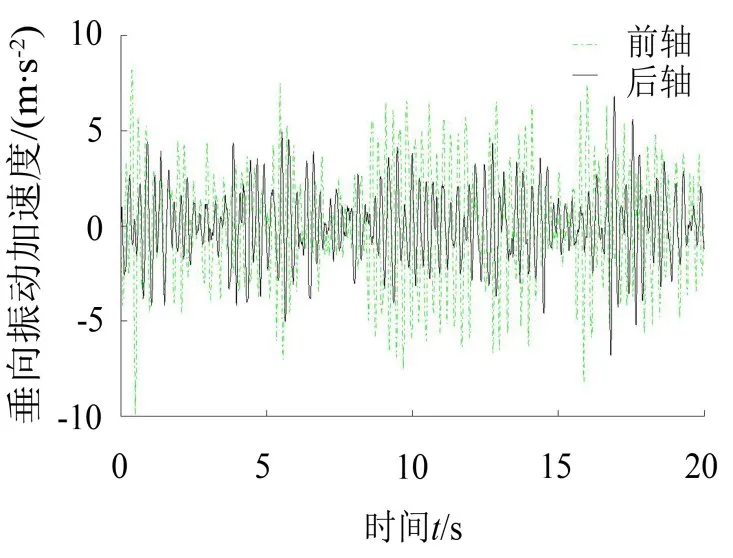
圖5 前、后軸垂向振動加速度變化曲線
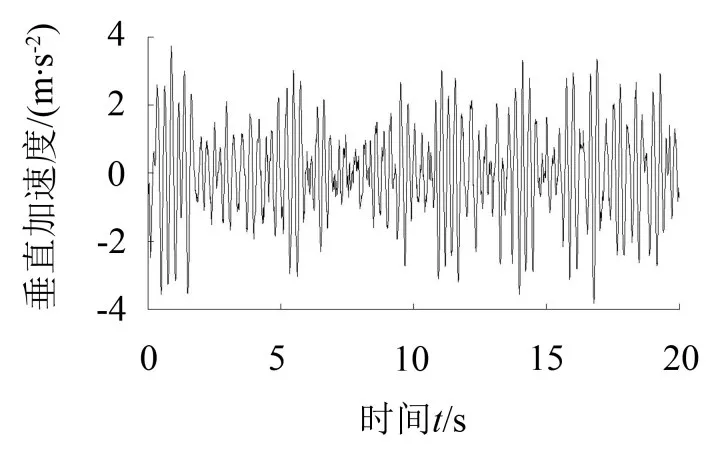
圖6 機身質心處垂向振動加速度變化曲線
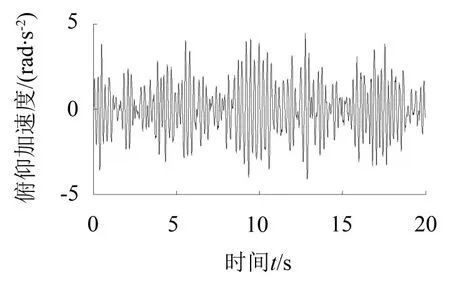
圖7 機身質心處俯仰角振動加速度變化曲線
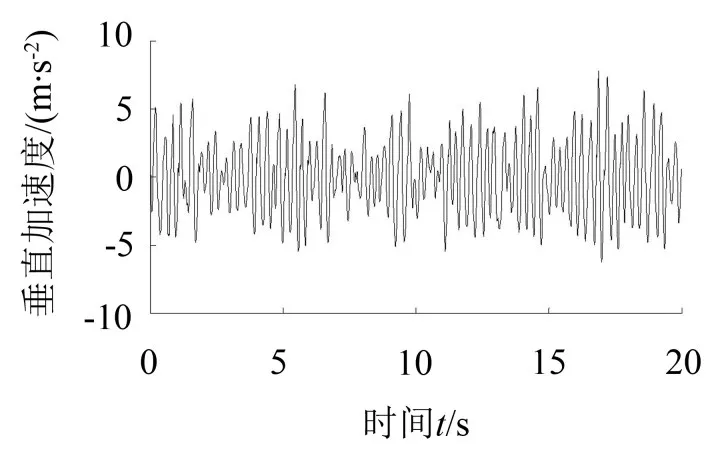
圖8 座椅垂向振動加速度變化曲線
將拖拉機行駛在標準試驗路面上的振動試驗測試結果與在同等條件下的振動模型仿真結果對比見表2。仿真時拖拉機振動模型的主要參數為表1中沒有安裝前軸懸架輪式農用拖拉機的主要性能參數。
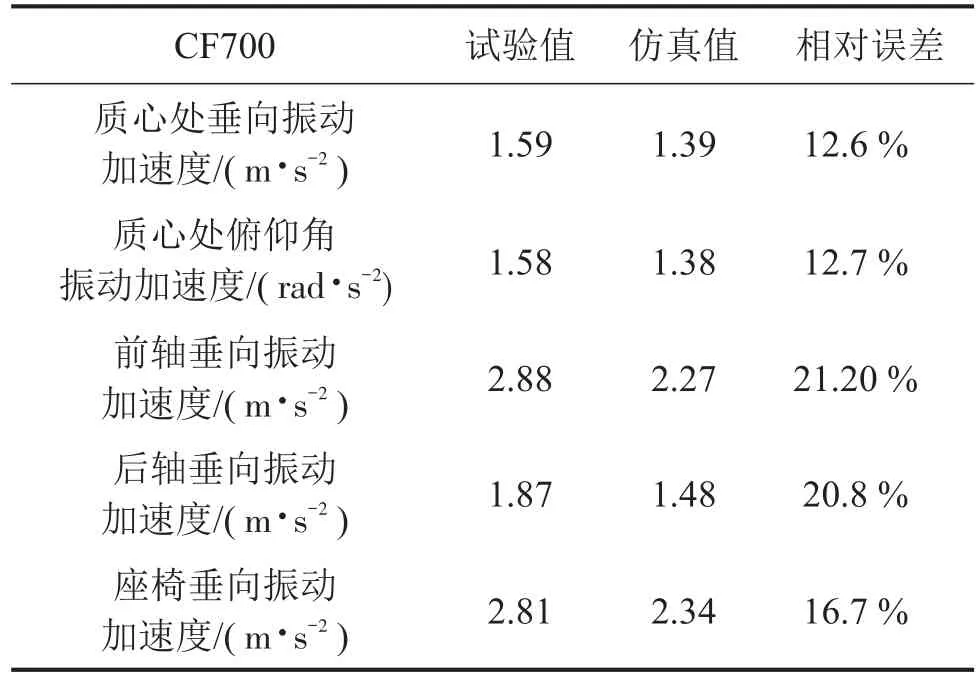
表2 試驗結果與仿真結果對比
由表2中試驗結果與仿真結果的對比情況可知,振動試驗測試結果中拖拉機各部位的振動加速度均方根值略高于振動模型的仿真結果,試驗結果與仿真結果的平均誤差率為16.8%。由于在建立振動仿真模型時并未考慮到拖拉機發動機振動傳遞到機身,拖拉機左、右車輪受到路面不平度激勵不同所引起的拖拉機的橫向振動以及車輪在實際工作過程中由于輪胎氣壓的變化而引起的剛度系數和阻尼系數的變化等多方面因素,振動模型的仿真結果與實際振動測試試驗結果的誤差在可接受的范圍內,且振動模型的仿真結果能夠真實地反映拖拉機的振動強度和振動趨勢。
4 前軸懸架參數優化
4.1 目標函數
懸架系統簧上質量的振動加速度、懸架動行程以及輪胎動載荷是評價車輛懸架系統性能好壞的最重要的三個評價指標。因此分別選取拖拉機機身質心處垂向振動加速度均方根值、拖拉機機身質心處俯仰方向角振動加速度均方根值、前軸懸架簧上質量垂向振動加速度均方根值、座椅質心處垂向振動加速度均方根值、前軸懸架動行程均方根值以及前輪胎動載荷均方根值等6個參數指標作為前軸懸架系統參數優化設計的子目標函數。
4.2 設計變量
本文主要研究前軸懸架的剛度系數和阻尼系數對拖拉機平順性的影響,只有在懸架系統中選配恰當的彈簧和減振器,懸架系統才能起到有效抑制車身振動的作用,并保證拖拉機具有較好的行駛平順性。因此,在對前軸懸架系統進行優化設計時,選取前軸懸架剛度系數和阻尼系數為優化配置的設計變量。
4.3 約束條件
綜上所述常發CF700型輪式農用拖拉機前軸懸架剛度系數和阻尼比的取值范圍約束條件為

在剛度系數和阻尼比的約束條件范圍內,采用逐步選優求解法,取剛度系數的步長Δk=1 kN/m,阻尼比的步長Δζ=0.05,并循環計算求解,逐步選優獲得拖拉機前軸懸架剛度系數和阻尼系數的最佳配置。
4.4 仿真模型的建立
本文選擇MATLAB/SIMULINK優化工具箱作為拖拉機前軸懸架剛度系數和阻尼系數的優化工具,并對拖拉機整機系統的動態振動特性進行仿真分析。通過MATLAB/SIMULINK仿真軟件產生積分白噪聲隨機路面不平度激勵模型,建立安裝有前軸懸架系統的常發CF700型輪式農用拖拉機系統四自由度平面振動仿真模型,如圖9所示。振動仿真模型中的輸入矢量為前、后車輪受到的隨機路面不平度激勵,即狀態方程式(3)中的A、B、C、D 4個矩陣,振動仿真模型的輸出量依次是拖拉機機身質心處垂向振動加速度、俯仰方向角振動加速度、座椅位置垂向振動加速度、前軸懸架垂向振動加速度、前軸懸架動行程、前輪胎動載荷等六個振動特性參數。
4.5 優化結果分析
當拖拉機在路面不平度等級為D級路面上以前進速度為10 km/h行駛時,通過建立的前軸懸架拖拉機系統4自由度平面振動仿真模型,以及結合上述確定的優化目標函數、設計變量以及約束條件等,在MATLAB平臺下編寫優化函數的M文件[14],優化仿真獲得拖拉機前軸懸架系統的剛度系數和阻尼系數的最佳配置參數值。
優化仿真結果得到當前軸懸架剛度系數kq=334 kN/m,ζ=0.35,即cq=12 665 N?s/m時,拖拉機系統的振動特性綜合性能達到最優。優化結果見表3。
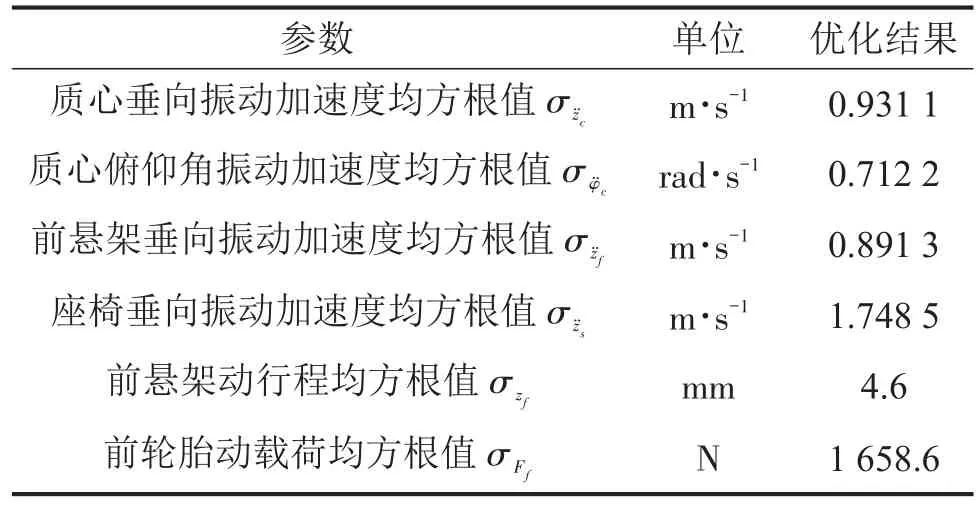
表3 前軸懸架拖拉機優化結果
改變拖拉機系統振動仿真模型中的狀態方程矢量,在同等條件下,建立沒有安裝前軸懸架的剛性輪式農用拖拉機3自由度平面振動模型,仿真得到拖拉機機身質心處垂向振動加速度均方根值、俯仰方向角振動加速度均方根值、座椅底板位置垂向振動加速度均方根值和拖拉機前輪胎動載荷均方根值分別為 1.089 9 m?s-2、1.084 2 rad?s-2、1.829 3 m?s-2和2.016 8 kN,安裝前軸懸架拖拉機的各部位振動參數較沒有安裝前軸懸架時分別下降14.57%、34.31%、4.42%和17.76%,在一定程度上改善了拖拉機的乘坐舒適性和操縱安全性等多方面性能。
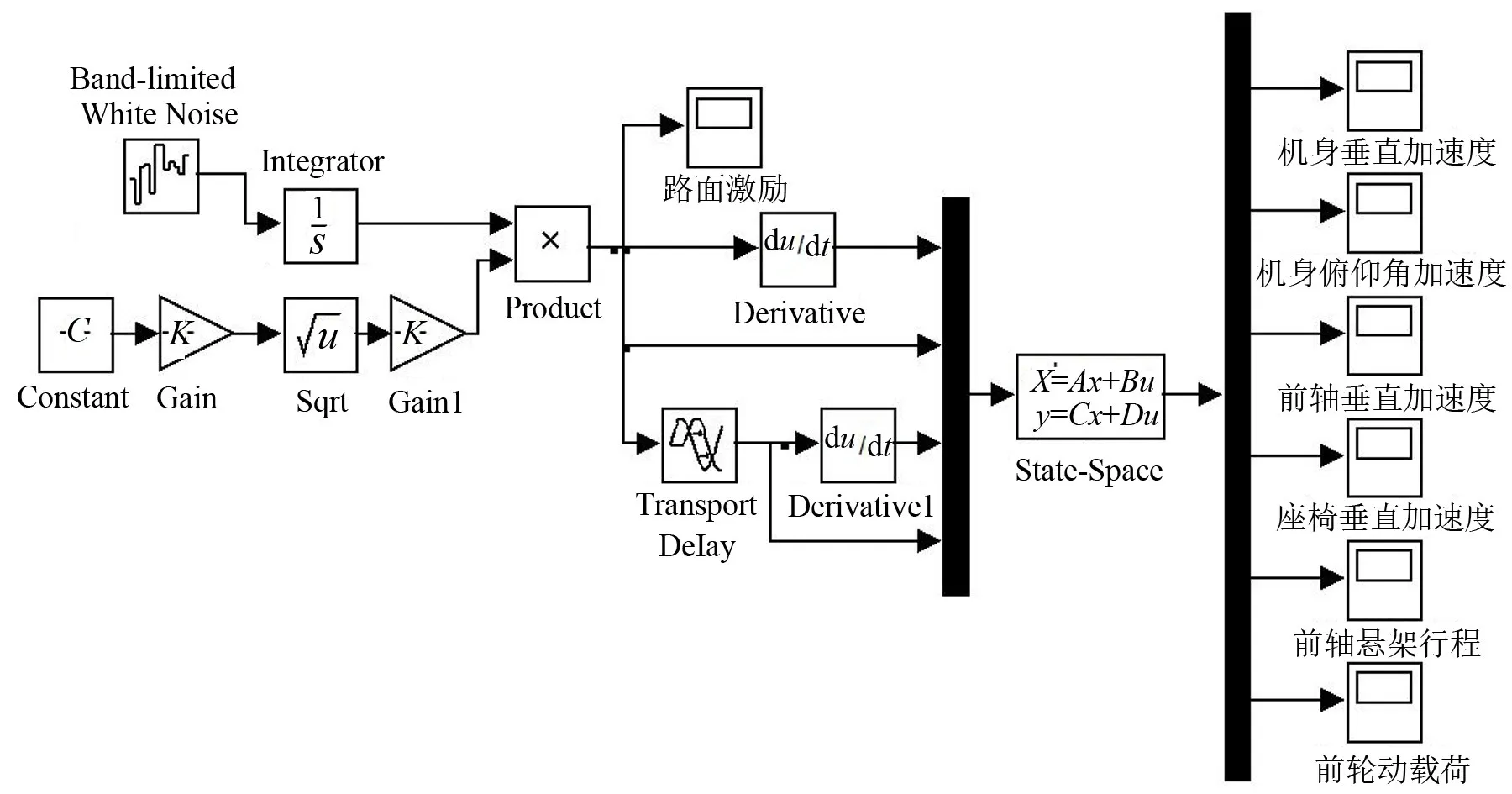
圖9 前軸懸架拖拉機平面振動仿真模型
將沒有安裝前軸懸架拖拉機的性能參數和優化配置后獲得的前軸懸架剛度系數和阻尼系數代入振動仿真模型中對比仿真分析,仿真結果得到拖拉機機身質心處垂向振動加速度值、俯仰方向角振動加速度值、座椅底板位置垂向振動加速度值以及前輪胎動載荷值隨時間變化曲線分別如圖10-圖13所示。

圖10 拖拉機質心處垂向振動加速度變化曲線
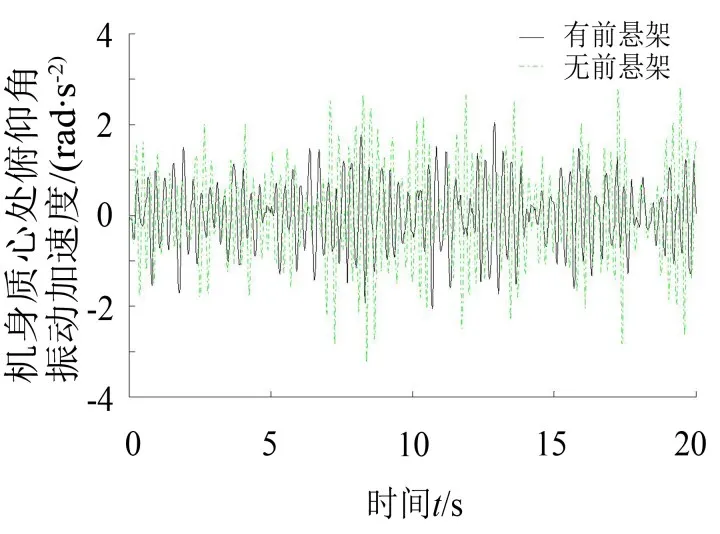
圖11 拖拉機質心處俯仰角振動加速度變化曲線

圖12 拖拉機座椅垂向振動加速度變化曲線
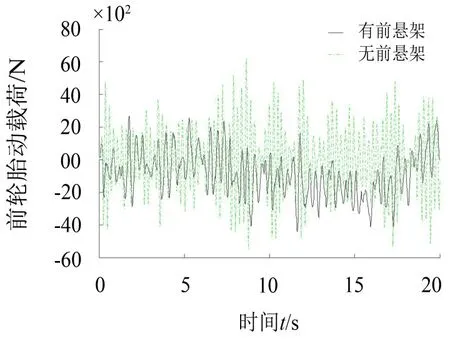
圖13 拖拉機前輪胎動載荷變化曲線
5 結語
本文以常發CF700型輪式農用拖拉機前軸懸架系統參數優化設計為研究目標,運用MATLAB/SIMULINK仿真平臺建立前軸懸架拖拉機系統四自由度平面振動仿真模型,仿真研究拖拉機整機系統的動態振動特性,在GB/T 10910—2004規定修建的100 m較平滑標準試驗路面跑道上進行了無懸架剛性拖拉機的振動試驗,并與同等條件下的振動模型仿真結果進行對比分析,得到試驗結果與仿真結果的平均誤差率為16.8%,綜合考慮其它因素誤差范圍可接受,仿真結果具有一定的可靠性。在此基礎上,利用MATLAB優化工具對拖拉機前軸懸架的剛度系數和阻尼系數進行優化設計,得到優化配置后的前軸懸架剛度系數和阻尼系數分別為334 kN/m和12 665 N?s/m。安裝有前軸懸架拖拉機的乘坐舒適性、行駛平順性以及操縱安全性等各方面性能都有明顯的改善。本文的研究結論為后期國產輪式農用拖拉機前軸懸架的參數匹配設計提供重要的理論研究基礎。
[1]萬葉青,張偉欣,楊儉,等.拖拉機機體振動分析方法及其應用[J].拖拉機與農用運輸車,2005(3):11-15.
[2]萬葉青,鄧彥平,李國英.拖拉機駕駛座傳遞振動的測量機評價[J].拖拉機,1989(1):32-38.
[3]宋春桃.車輛座椅的磁流變液減振研究[D].南京:南京理工大學,2007.
[4]MARTELLI M,PAOLUZZI R,ZAROTTI L G.The front suspension of agricultural tractors[C].14 th International Conference of the International Society for Terrain-Vehicle Systems,Vicksburg,Ms USA October 20-24,2002.
[5]WEIGELT H.Front axle suspension for agricultural tractors[C]. Internationale Tagung Landtechnik,Braunschweig(Germany,F.R.),7-8 Nov 1985:47-49.
[6]LEHTONEN T J,JUHALA M.Predicting the ride behaviour of a suspended agricultural tractor[J].International Journal of Vehicle Systems Modeling and Testing,2005,1(1/2/3):131-142.
[7]任衛群.車-路系統動力學中的虛擬樣機[M].北京:電子工業出版社,2005.
[8]FAFARD M,LAFLAMM E M.Dynamic analysis of existing continuo us bridge[J].JournalofBridge Engineering,1998,3(1):28-37.
[9]聶信天,史立新,顧浩,等.農用輪胎徑向剛度和阻尼系數試驗研究[J].南京農業大學學報,2011,34(5):139-143.
[10]聶信天,史慶春,顧浩,等.拖拉機轉動慣量測量及誤差分析[J].機械科學與技術,2012,31(8):1325-1328.
[11]張洪欣.汽車設計[M].2版.北京:機械工業出版社,1999.
[12]周長城.汽車平順性與懸架系統設計[M].北京:機械工業出版社,2011.
[13]屈維德,唐恒齡.機械振動手冊[M].2版.北京:機械工業出版社,2000.
[14]張德豐.MATLAB數值分析[M].北京:機械工業出版社,2012.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03