基于單天線的模式濾波測角方法
2018-03-04 09:11:36朱曉丹裴澤霖王克讓朱偉強
航天電子對抗 2018年6期
朱曉丹,裴澤霖,王克讓,陳 卓,朱偉強
(1.中國航天科工集團8511研究所,江蘇 南京 210007; 2.北京遙感信息研究所,北京 100192)
0 引言
角度估計是雷達、偵察、導航等領域的重要內容,按照觀測量的不同,角度估計方法大致可以分為比幅測角、比相測角、時差測角等[1]。其中,比相測角和時差測角方法需要形成基線,時差測角需要2個接收天線和通道,基線相對較長;比相測角主要包括相位干涉儀、空間譜估計測角,一般要求多個接收天線和通道。比幅測角方法通過比較多個天線/波束信號幅度的相對大小得到目標角度估計,最少只需要一個天線。由于原理簡單,且信號幅度易于測量,比幅測角方法得到較早的研究和發展。常見的比幅測角方法包括最大幅度搜索法[1]、最小幅度搜索法[2-3]、多天線/波束比幅法[4]以及和差波束法[5]等。但是,傳統比幅測角方法一般要求天線或波束的主瓣對準目標方向,因而只利用到了方向圖的主瓣信息,進一步提高測角精度需要充分利用天線在不同方向上獲取的信息。文獻[6~8]研究了利用旋轉單天線實現測角的方法,提出了最大似然估計方法,但需要進行搜索求解,算法計算量大。文獻[9]基于最大后驗概率函數提出一種迭代解卷積方法,可實現超分辨率測角。文獻[10~11]將旋轉單天線測角問題轉化為譜估計模型,并基于有限更新率采樣理論,提出一種超分辨率估計方法,但需要通過零化濾波等方法求解,計算復雜度較高。文獻[12]基于正交匹配追蹤方法估計出目標角度。文獻[13~14]將天線看成是傳輸函數,接收信號功率則是天線方向圖與觀測角度的卷積,因而提出一種基于傅里葉變換和解卷積的求法。盡管上述方法給出了目標角度的估計,但普遍存在計算復雜較高的問題,且通常將天線主瓣近似為高斯函數,引入了模型誤差,因此也難以實現高精度測角。為了避免傳統比幅方法的不足,并實現低復雜度測角,受文獻[15~16]中幅度加權測角方法的啟發,本文提出一種基于模式濾波測角方法,首先將天線方向圖表示為指數和形式,再通過加權實現對特定天線模式的選擇,將問題轉化為可解析估計的模型,同時推導得到理論精度和無模糊測角范圍。1 傳統比幅測角方法單天線在旋轉圓周上兩個不同的觀測點處接收角度為θ0的目標信號,2次觀測間隔角度為Δθ。由于接收角度的不同,接收到的目標信號存在功率的差異,比較2次接收信號功率的相對大小即可實現對角度的估計,假定天線方向圖為F(θ),兩次接收到的信號的功率分別為p1、p2,則有:p2/p1=Fθ0-Δθ/Fθ0
(1)
因此,可由天線方向圖建立比幅測角查找表,根據p2/p1確定目標角度。也可以將天線主瓣擬合為二次函數推導解析解,如將天線主瓣擬合為式(2)所示的形式:
F(θ)=aθ2+c
(2)
式中,a、c為二次擬合系數;θ∈[-θm,θm],θm為擬合的主瓣寬度,如取3dB波束寬度,其大小影響擬合的精度以及最大交叉角度Δθ,一般有Δθ<θm。則有:
(3)
此時可根據p2/p1結合擬合系數求得:
Δθ+(a2Δθ2p1p2-ac(p1-p2)2)1/2)/a(p1-p2)
(4)
這種比幅測角方法原理簡單,容易實現,但一般需要在主瓣內接收信號,測角精度和測角范圍與方向圖主瓣形狀有關,通常主瓣越窄、主瓣內增益變化越大,測角精度越高,但測角范圍也越小,在實際應用中一般難以實現高精度測角。
2 旋轉單天線測角模型
為了提高測角精度,需要充分利用天線在不同方向上接收到的角度信息[17]。如圖 1所示,接收天線圍繞圓點O旋轉并以不同角度接收來自TO方向的目標信號,圖1中箭頭表示天線旋轉方向,粗實線表示天線方向圖。假定在旋轉圓周上共有Q個均勻分布的觀測角度,稱為觀測點。天線方向圖增益表示為F(θ),對角度為θ0的目標信號,假設利用增益為0dB的天線接收到信號的平均功率為P0(P0>0),則各觀測點θq收到的信號平均功率rq(q為觀測點序號,0≤q≤Q-1)為:rq=P0F(θ0-θq)
(5)
圖1 旋轉單天線測角示意圖

圖2 不同模式下的天線方向圖分量
3 基于模式濾波的角度估計
3.1 模式濾波算法

(9)
此時,如果m=pN+l只有一組解,或僅有一組解對應的cm不為零,將該解記為cm0,則有:
gl=P0Ncm0ejm0(θ0-θd)
(10)
(11)
式中,φ為cm0的相角,稱為模式相位,即tanφ=lm(cm0)/Re(cm0)。從上述求解方法可以看出,加權求和實現了對模式的濾波,從而將角度估計模型轉化為解析形式。
3.2 加權參數l和模式m的選擇
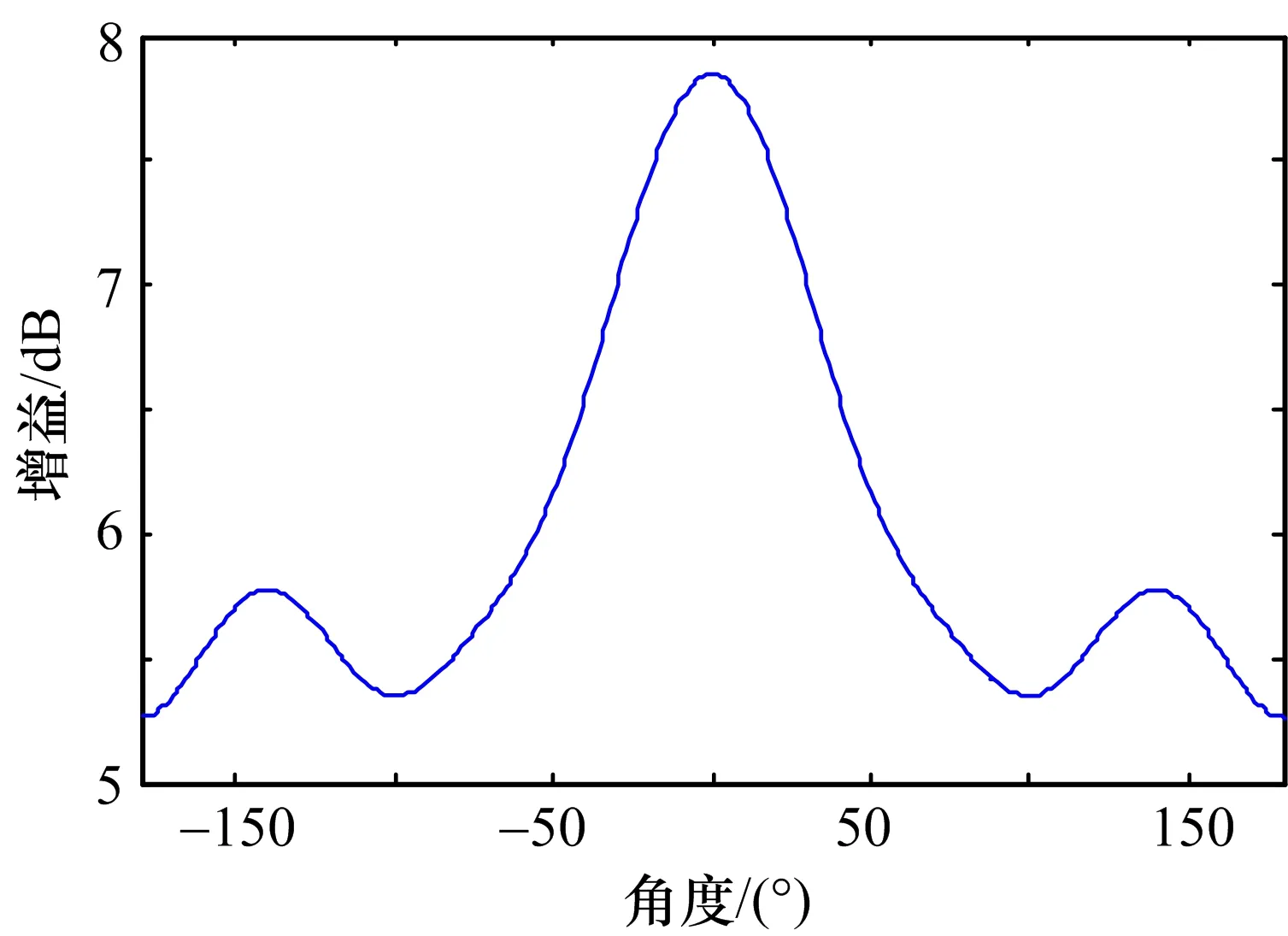
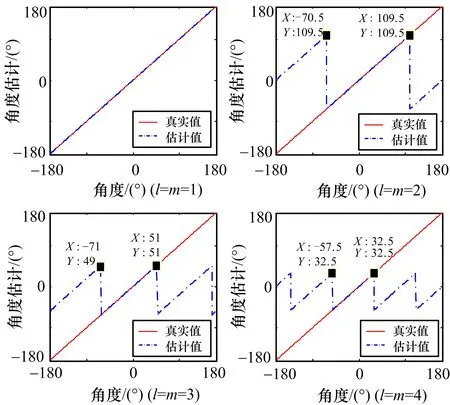
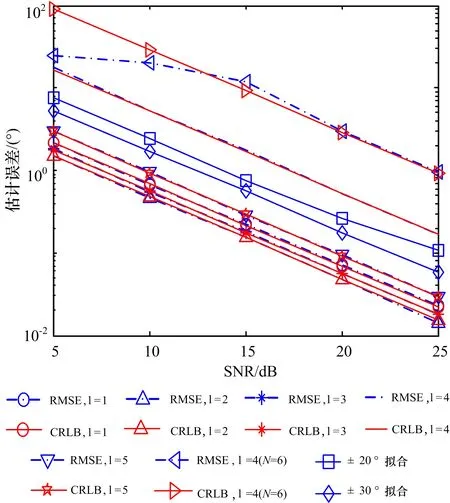
上一節指出,式(10)成立的條件是m=pN+l只有一組解,或僅有一組解對應的cm不為零。由-M≤m≤M可以得到-(M+l)/N≤p≤(M-l)/N,則p的取值范圍最多為2M/N(表示不小于 2M/N的最小整數)。1)當N>2M時有-2-1-(l/N) 表 1 M=5時加權參數和模式的選擇(c-5=c5≠0) 從本節的分析可以看出,可通過選定l和加權運算實現對cm的選擇。對于旋轉單天線,N>2M是容易滿足的,只需要在旋轉方向選擇足夠的觀測點;而如果N較小,為了使用模式濾波測角方法,需要天線滿足一定的條件,即特定的模式為零或非零。 為了估計角度,還需要知道φ,φ為實際天線的參數,可通過天線的測試計算得到。在K個不同的方向接收同一測試信號,信號功率記為r(θk)(k=1,…,K)。假定天線方向圖關于0°對稱,根據式(7)整理成向量形式為: (12) (13) 根據式(11)可以知道,由于arctan(·)函數可以得到[-π,π]的解值范圍(結合g的實部、虛部的正負性),因此無模糊測角范圍為[-(π+φ)/m0,(π-φ)/m0],超過這一范圍將出現測角模糊,模糊周期為2π/m0。實際上,經過模式濾波,天線方向圖的有效分量為2Re(cm)cos(mθ),為關于θ的周期函數,因而采用模式濾波法進行測角時,本質上是采用圖 2中所示的各種周期性的方向圖天線進行測角,因而出現了模糊問題,結合cos(mθ)的正負性可知,無模糊范圍的大小分別為2π、2π/2、2π/3、2π/4。由圖 2可以知道,m0越小,無模糊測角范圍越大;在沒有其它先驗信息的條件下,為了在[-π,π]范圍內無模糊測角,需要保留m0=1的模式。 根據式(10)可得:Re(gl)=P0N|cm0|cosφ′ (14)lm(gl)=P0N|cm0|sinφ′ (15) 式中,φ′=m0(θ0-θd)+φ。由于P0未知,對式(14)、式(15)進行微分,可整理為: (16) (17) (18)上述證明中用到了Re(a)Re (b)=2-1Re(abH+ab),H 表示對向量a或b的共軛轉置。類似地,根據Im(a)Im(b)=2-1Re (abH-ab),Re(a)Im(b)=2-1Im (abH-ab),可求得: Ι2 (19) 式中,Ι2為二階單位矩陣。代入式(17)可求得: (20) 如果對估計式(11)進行誤差推導,得到的測角精度與式(20)相同,因此式(11)所示的算法可以達到理論精度,這里不再詳細描述推導過程。由式(20)可以看出:1)測角誤差與m0成反比,根據前一節的分析可以知道,無模糊測角范圍也與m0成反比,即出現了無模糊測角范圍和測角精度的矛盾;測角精度與|cm0|成反比,對特定的天線,可通過式(20)計算出不同模式對應的理論估計精度,從而選擇特定的模式進行測角。2)在同樣的模式下,觀測點數越多,測角精度越高;信噪比越高,測角精度越高。3)估計精度與起始觀測角度θd和待估計角度θ無關,因此,天線主瓣是否對準目標對測角性能沒有影響。為了提高測角精度并兼顧無模糊測角范圍,可以選擇較小的模式保證較大的無模糊測角范圍,同時提高cm0,并選擇足夠多的觀測點數保證較高的測角精度。 圖3 隨機產生的天線方向圖 圖4 無模糊測角范圍 圖5 測角精度與模式和SNR的關系 下面對本文提出的旋轉單天線模式濾波測角進行仿真分析。將天線量化為共計M=5個模式,隨機產生的c0~c5為4.067、0.437、0.314、0.180、0.014、0.065,圖 3給出了天線方向圖。下面結合該天線進行仿真分析。仿真中,利用增益為0 dB的天線接收到信號的平均功率P0為1。仿真1(無模糊測角范圍分析):選擇N為180,此時令l=m即可實現對cm的選擇。圖 4給出了不同模式下的無模糊測角范圍,可以看出,m越大,無模糊測角范圍越小,與理論分析得到的2π/m一致。仿真2(模式和信噪比條件對測角性能的影響分析):仿真中目標角度為5°,信噪比(P0/σr)范圍為5~20dB,在旋轉圓周上均勻選擇180個觀測點,進行1000次Monte-Carlo仿真,統計測角誤差。圖 5給出了不同信噪比條件下,測角誤差與模式的關系。為了與傳統比幅測角方法進行對比,圖 5還給出了同樣信噪比條件下利用該天線進行比幅測角的精度,利用二次函數擬合主瓣,波束擬合范圍分別為-20°~+20°和-30°~+30°,對應的雙波束間隔角度分別為20°和30°,得到的方向圖擬合系數分別為[-4.711,6.090]以及[-4.224,6.090]。由圖 5可以看出:本文提出的模式濾波方法可以達到理論估計精度,估計精度隨著信噪比的提高而提高,不同模式下測角精度不同,取決于模式及模式大小的乘積。除模式4由于模式大小偏小外,模式1~3、5對應的測角精度均優于傳統比幅測角方法。圖 5中還給出了N為6、l為4、測角模式m為4時的估計性能仿真。根據表 1,此時要求c-2=c2=0,為了便于對比,仿真天線模式參數c0~c5選擇為4.067、0.437、0、0.180、0.014、0.065。可以看出,此時測角性能劣于N=180時模式4的測角性能,與理論分析給出的估計誤差反比于(N)1/2一致。圖5中,在SNR較低時出現的估計誤差小于理論誤差,是因為此時估計值被限定在[-π/4,π/4]范圍內,影響了測角誤差的估計。 本文提出一種基于模式濾波的旋轉單天線測角方法,通過將天線方向圖表示為指數和形式,設計合適的模式濾波參數,對旋轉圓周上均勻觀測點收到的信號的功率進行加權,實現對角度的解析估計;由于濾波得到的模式影響測角精度和測角范圍,在不同觀測條件下需要采用不同的模式選擇方法。本文提出的方法可獲得較高的測角精度,算法簡單,容易實現,對天線的適應性較強。由于只需要單個接收天線和處理通道,該方法可應用于小型無人機、微納衛星等裝載能力有限、或難以布置長基線的平臺,具有十分廣泛的應用前景。■
3.3 模式相位φ的估計

4 測角性能分析
4.1 測角范圍和模糊問題
4.2 理論誤差分析



5 仿真分析
6 結束語
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
