基于51單片機自控越障尋跡小車設計
2018-03-05 00:39:18胡云霄趙文寶安旭松
長春師范大學學報 2018年2期
胡云霄,丁 頌,趙文寶,安旭松
(長春師范大學工程學院,吉林長春 130032)
根據全國大學生工程訓練綜合能力競賽主題“重力勢能驅動的自控行走小車越障競賽”要求設計重力小車,其驅動行使的動能是由質量為1kg的標準砝碼(鋼制φ50mm×65mm)鉛垂下降400mm來獲得。并由除人工交互遙控外的機械或電控裝置自動實現具有賽道障礙識別、軌跡判斷及自動轉向功能和制動功能,小車示意圖如圖1所示。為使小車在如圖2所示的賽道中行駛,其分為平賽道和坡道,坡道位置位于直賽道中央,出發線在平賽道上,距離坡道起始位置大于1m,具體位置在兩端直線、半圓弧切點處,賽道邊緣設有高度為80mm的道牙擋板,并間隔不等(隨機)交錯設置多個高度約80mm的障礙板,其最小板間距為1m,每個障礙板從賽道一側邊緣延伸至超過中線130mm。本文中設計了一種機電結合的基于51單片機自控越障尋跡小車以滿足競賽主題要求。

圖1 小車示意圖
1 小車傳動系統設計
砝碼的重力勢能轉化為小車動能驅動小車前行,砝碼重力勢能一定,傳動系統的轉化效率越高,小車行駛的距離越遠。本文設計的傳動系統由齒輪、定滑輪、繞線輪組成,該系統用于進行運動傳遞和能量轉換。
[指導教師]丁 頌(1984- ),男,副教授,博士,從事機械傳動研究。

圖2 賽道示意圖

圖3 滑輪傳動簡圖
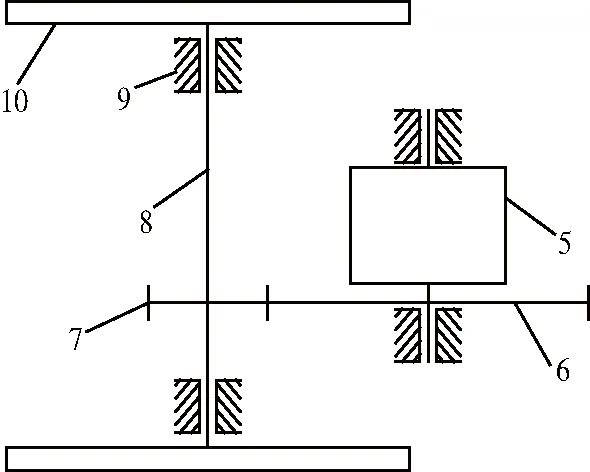
圖4 系統傳動簡圖
傳動系統結構簡圖如圖3和圖4所示,其中,1和9為支撐,當砝碼2下落時,重力勢能通過繩子4經定滑輪3傳到繞線輪5,以順時針方向將繩子纏繞在繞線輪5上。隨著砝碼2的下落,繩子4帶動繞線輪5以逆時針方向轉動,使齒輪6、7以逆時針方向轉動,后輪軸8和后輪10以逆時針方向轉動,從而將重力勢能轉化成使小車向前行駛的動能,小車向前行駛。SolidWorks虛擬建模小車如圖5所示。

圖5 小車三維圖

圖6 轉向控制系統結構
2 小車電控硬件設計
2.1 障礙檢測模塊
障礙檢測模塊為自控越障尋跡小車的主要模塊之一,障礙檢測模塊要精準、高速地采集障礙物信息,選用E18-d50NK型光電開關作為障礙檢測模塊的檢測元件,光電開關利用被檢測物對光束的反射,由同步回路選通電路,檢測物體有無。運用光電開關來檢測小車到障礙物的距離,得到小車的位置信息,通過反饋控制使小車產生相應動作。
2.2 轉向控制模塊
主控模塊通過反饋作用調用障礙檢測模塊檢測到的位置信息,對其進行處理,通過改變STC12C5410單片機的PWM端口輸出的脈寬調制輸出信號控制舵機轉角大小,實現對小車轉向控制,改變小車的行駛方向,其控制結構圖如圖6所示。
2.3 硬件總體電路設計
控制系統是由信號輸入裝置、執行器和控制單元組成,本文是以STC12C5410單片機作為主控模塊的主芯片,該控制系統由主控模塊、障礙檢測模塊、轉向控制模塊等組成,總體框圖如圖7所示。

圖7 系統總體框圖

圖8 系統總體電路
系統的總體電路如圖8所示。分別選用P3.2引腳和P3.3引腳作為光電開光P6、P7檢測小車位置信息的信號輸入端口,光電開關P6、P7檢測得到小車與障礙物的位置信息,經預處理通過信號輸入端口進入STC12C5410單片機U1內部自帶的A/D轉換器,將模擬信號轉換為數字信號,經處理后通過PWM產生一個可調的高低電平信號輸出,輸出信號通過單片機U1的P1.1引腳傳送給舵機P5,調節舵機P5轉角,控制小車的轉向,ISP端口在本系統作為程序下載和在線調試。
3 小車控制程序設計
自控越障尋跡小車在前行過程中,單片機控制系統需要接收識別電路信號,采用PWM脈寬調制,產生一個可調高低電平信號,控制舵機的轉角,從而實現小車轉向。控制系統基于KeiluVision 4軟件采用C語言編程,并采用模塊化設計方法以便于程序調試。
主程序根據小車所處位置的不同,確定舵機的任務,使小車產生相應的動作。程序流程圖如圖9所示,當小車在賽道上行走時,系統對光電開關信號進行快速的判斷處理,當距離等于25cm時,為可調的光電開關檢測距離值,當距離小于25cm時,光電開關檢測到障礙物燈亮,反之無障礙物燈滅,具體情況如下:左邊光電開關燈亮右邊燈滅,舵機右轉120度;左邊光電開關燈亮右邊燈亮,舵機保持該時刻狀態;左邊光電開關燈滅右邊燈亮,舵機左轉60度;左邊光電開關燈滅右邊燈滅,舵機保持該時刻狀態。

圖9 程序流程圖
4 結語
本文進行基于51單片機自控越障尋跡小車的傳動系統、電控硬件和控制程序進行設計。實現小車靠重力勢能轉化進行動力驅動,51單片機自動控制小車的行進方向,實現自控越障尋跡平穩運行,達到預期效果。
[1]徐冰,印江,陳俊君.不完全齒輪與曲柄搖桿的無碳小車設計[J].實驗室研究與探索,2016,35(2):59-61,134.
[2]吳新良,劉建春,鄭朝陽.重力驅動的避障小車設計與制造[J].機械設計,2014,31(10):25-28.
[3]季元進,任利惠,顧建.利用變心齒輪傳動的無碳小車的機構創新設計[J].機械設計,2014,31(3):71-74.
[4]張錚,張江寧,薛竹村,等.循跡避障滅火功能智能小車設計[J].實驗室研究與探索,2016,35(11):141-145,205.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
海峽科技與產業(2016年3期)2016-05-17 04:32:12
