混聯式混合動力汽車高速工況經濟性研究
2018-03-07 02:17:23周文太王晨趙治國于海生張彤
汽車技術 2018年2期
周文太 王晨 趙治國 于海生 張彤
(1.同濟大學,上海 201804;2.科力遠混合動力技術有限公司,上海 201501)
1 前言
由于越來越多的消費者短途選擇純電動汽車,遠行選擇混合動力汽車,因此有必要優化混合動力汽車的高速工況經濟性。為此,本文針對混聯式混合動力汽車高速工況經濟性,綜合考慮發動機比油耗、電機功率損耗、電池功率損耗,提出一種基于窮舉法[1]的經濟性最優工作點設計方案,并進行了轉轂試驗驗證。
2 混聯式混合動力系統建模
混聯式混合動力系統包括混合動力變速器、發電機、電機MG1、電機MG2、動力電池,對各零部件分別建模。
2.1 混合動力變速器模型
混合動力變速器的結構如圖1所示,采用雙行星排結構,雙行星排共用齒圈和行星架,其中齒圈R連接到輸出軸OUT,行星架PC經扭轉減振器TSD連接到發動機ENG,太陽輪S1連接到小電機MG1,太陽輪S2連接到大電機MG2。混合動力變速器還擁有兩個制動器,分別為與行星架相連的制動器B1以及與太陽輪S1相連的制動器B2。

圖1 混合動力變速器結構
雙行星排運動部件的轉速關系[1~3]為:
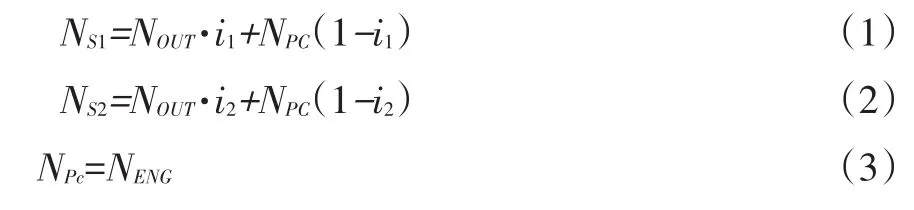

式中,i1、i2分別為前、后行星排傳動比;NOUT、NPC、NS1、NS2、NENG、NMG1、NMG2分別為齒圈R、行星架PC、太陽輪S1、太陽輪S2、發動機、電機MG1和電機MG2的轉速。
雙行星排運動部件的扭矩關系[1~3]為:

式中,aS1、aS2、aPC分別為太陽輪S1、太陽輪S2、行星架PC的角加速度;TS1、TS2、TPC和TOUT分別為作用在太陽輪S1、太陽輪S2、行星架PC以及齒圈R上的轉矩;TMG1、TMG2、TENG分別為電機MG1、電機MG2、發動機輸出的轉矩;JS1、JS2、JPC分別為太陽輪S1、太陽輪S2、行星架PC的轉動慣量。
2.2 發動機模型
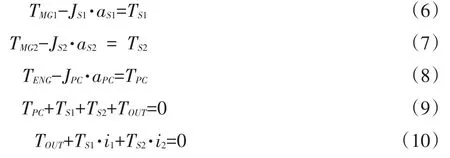
發動機萬有特性如圖2所示。

圖2 發動機萬有特性
通過查發動機萬有特性二維表格,利用式(8)求得發動機比油耗be:
2.3 電機MG1模型
電機MG1的效率特性曲線如圖3所示。
電機MG1的理論用電功率和實際用電功率計算式為:

式中,PMG1_ideal為電機MG1的理論電功率;ηMG1為電機MG1的效率;PMG1為電機MG1的實際電功率。

圖3 電機MG1特性曲線
2.4 電機MG2模型
電機MG2的效率特性曲線如圖4所示。
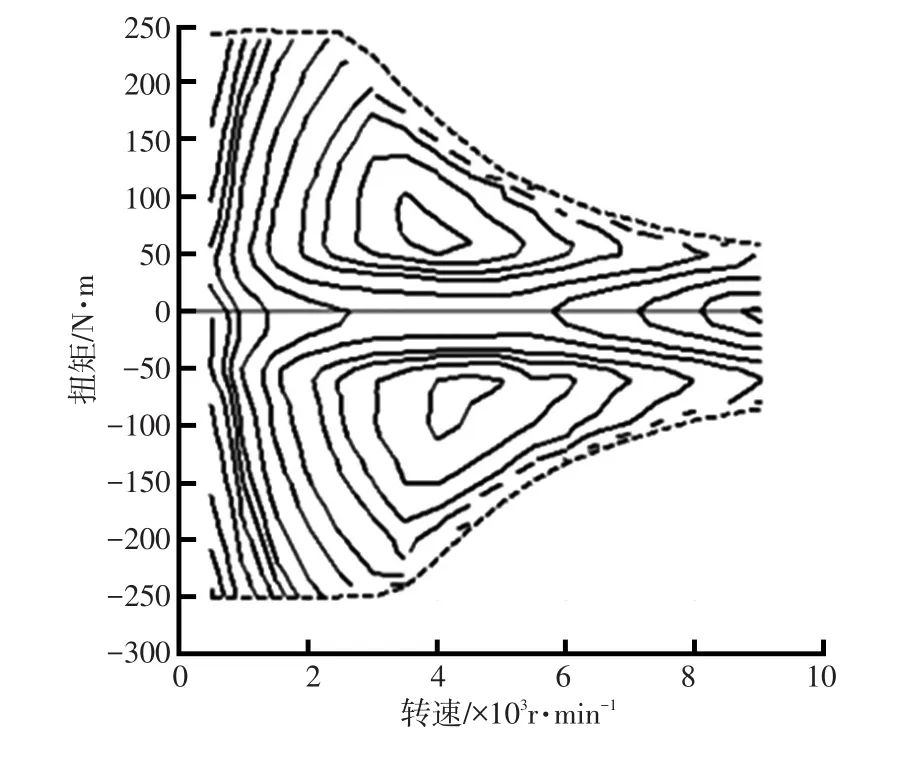
圖4 電機MG2特性曲線
電機MG2的理論用電功率和實際用電功率計算式為:

式中,PMG2_ideal為電機MG2的理論電功率;ηMG2為電機MG2的效率;PMG2為電機MG2的實際電功率。
2.5 動力電池模型
假設電池溫度處于合理范圍、電池處于健康狀態,只考慮電池內阻造成的電功率損耗,則電功率損耗計算式為:

式中,Pb為動力電池總用電功率;U為電池電壓;Pb_loss為電池的電功率損耗;I為電池電流;rb為電池內阻。
2.6 整車動力學模型
由車輛動力學可得:

假設車輛在平直路面勻速行駛,則整車行駛阻力[4]為:

式中,V為車速;r為車輪半徑;i為主減速比;Fresi為整車行駛總阻力;G為作用于整車的重力;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積。
3 高速工況油耗分析
3.1 高速工況百公里油耗計算
在車速為V的高速工況下,特定的發動機工作點NENG、TENG對應的整車百公里油耗Q的計算方法如下:

式中,PEP為電子油泵用電功率;PDC為DC用電功率,PAC為空調用電功率;PEP、PDC、PAC均從整車CAN網絡上獲取;ρ為燃油密度。
式(24)中,PMG1、PMG2、Pb_loss通過式(1)~式(5)和式(12)~式(19)計算得到。
3.2 經濟性最佳工作點的確定
在各車速下,基于窮舉法,列出所有允許的NENG、TENG組合,根據上述公式計算得到所有NENG、TENG組合對應的百公里油耗。做取小運算得到各NENG下的最經濟百公里油耗,以NENG為橫軸,各NENG下最經濟百公里油耗為縱軸,得到二者特性關系如圖5所示。

圖5 發動機轉速與百公里油耗特性
由圖5可知,各車速下均能找到一個百公里油耗最經濟的發動機轉速,且該發動機轉速與車速呈線性關系。圖6為各車速下的最經濟發動機轉速以及對應的發動機扭矩、電機MG1轉速、電池功率,由圖6可知,最經濟發動機轉速對應的電機MG1轉速為0,說明系統工作在制動器B2鎖止的混合動力模式。B2鎖止混合動力模式的系統杠桿關系[4]如圖7所示。

圖6 經濟性最佳發動機工作點及電池功率特性
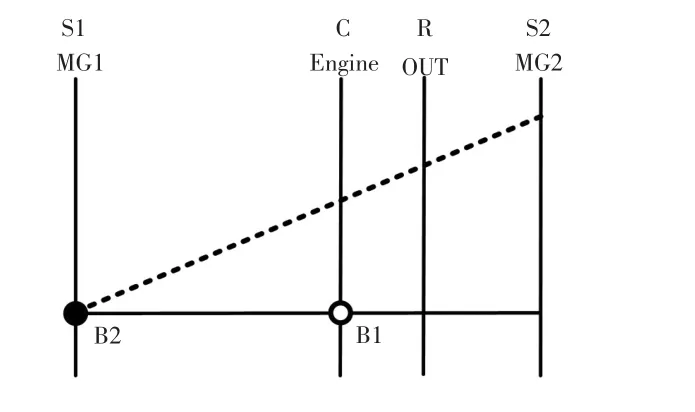
圖7 制動器B2鎖止的混合動力系統杠桿圖
制動器B2鎖止時,電機MG1轉速固定為0,發動機轉速及電機MG2轉速隨輸出軸轉速的上升而線性上升,相當于固定速比傳動。
3.3 不充不放模式下最佳工作點的確定
圖6顯示系統工作在經濟性最優工作點時,電功率為負,即系統向電池充電。本文所研究的混合動力汽車匹配6 Ah的鎳氫電池,如果以6 kW的功率給電池充電,則只需要5.4 min即可將電池SOC從0.4充電至0.7,達到電池常用SOC上限,所以不能一直向電池充電。
為此,采用兩段式控制策略,在SOC低于閾值0.7時,控制系統工作在經濟性最優模式向動力電池充電;當SOC達到指定的閾值后切換到不充不放模式,以避免電池過充。采用兩段式策略可在高速工況將電池充電到SOC較高狀態,使得車輛離開高速、進入城郊工況時擁有較長的純電續航里程,從而不僅在高速工況經濟性較佳,也有助于在城郊工況獲得較好的經濟性。
在各車速下,采用窮舉法,限制電池用電功率為0.1 kW以內,計算所有允許的發動機工作點對應的百公里加速油耗,得到不充不放模式下最佳發動機工作點如圖8和圖9所示。由圖8和圖9可知,不充不放模式系統工作在B2鎖止點經濟性最佳。
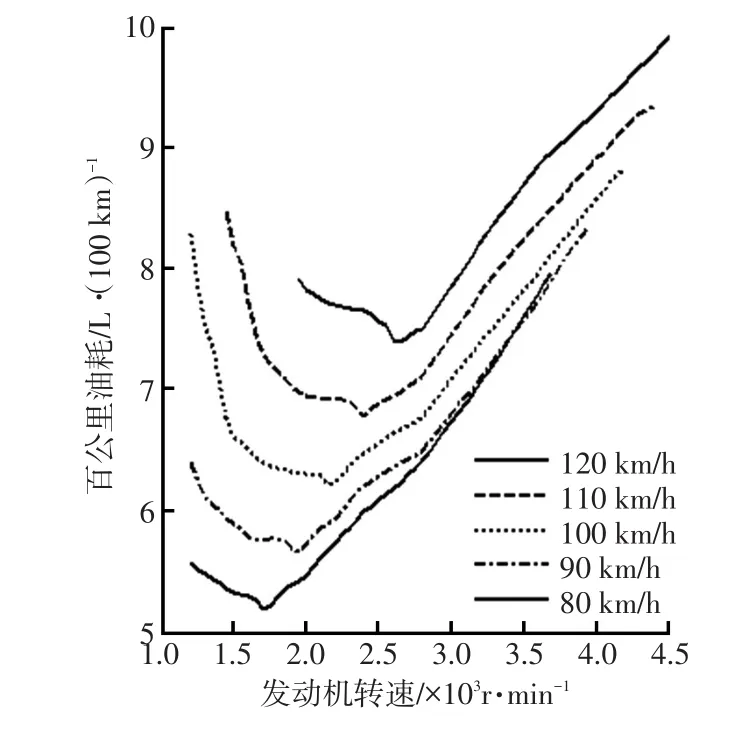
圖8 不充不放模式下發動機轉速與百公里油耗特性

圖9 不充不放模式下發動機工作點及電池功率特性
圖9與圖6的發動機扭矩曲線差距較大,圖6發動機扭矩穩定工作在100 N·m左右,而圖9發動機扭矩隨車速的上升而上升。原因是不充不放模式下電池功率需在零附近,所以發動機扭矩與整車行駛阻力呈線性關系。
3.4 鎖止點附近發動機比油耗及電機功率損耗分析
以不充不放模式、車速為110 km/h為例,分析制動器B2鎖止點附近的比油耗及電機功率損耗變化規律。
圖10為發動機扭矩及比油耗的變化規律,圖中虛線為鎖止點。在鎖止點左側,隨發動機轉速的上升,發動機扭矩從150 N·m開始逐漸下降,在扭矩為120~135 N·m范圍比油耗達到最佳的240 g/kW·h,然后,隨發動機轉速上升、扭矩下降,比油耗逐漸上升;在鎖止點處,比油耗為257 g/kW·h;在鎖止點右側,比油耗隨發動機轉速的上升而惡化。

圖10 發動機扭矩及比油耗變化規律
圖11為電機MG1工作點及功率損耗的變化規律,圖中虛線為鎖止點。在鎖止點左側,隨發動機轉速的上升,MG1轉速與扭矩絕對值均下降,MG1功率及功率損耗也隨MG1轉速逼近鎖止點而下降;在鎖止點,MG1進入Standby狀態,功率損耗為0;在鎖止點右側,隨發動機轉速的上升,MG1轉速上升、扭矩下降,功率緩慢上升,功率損耗也隨之緩慢上升。
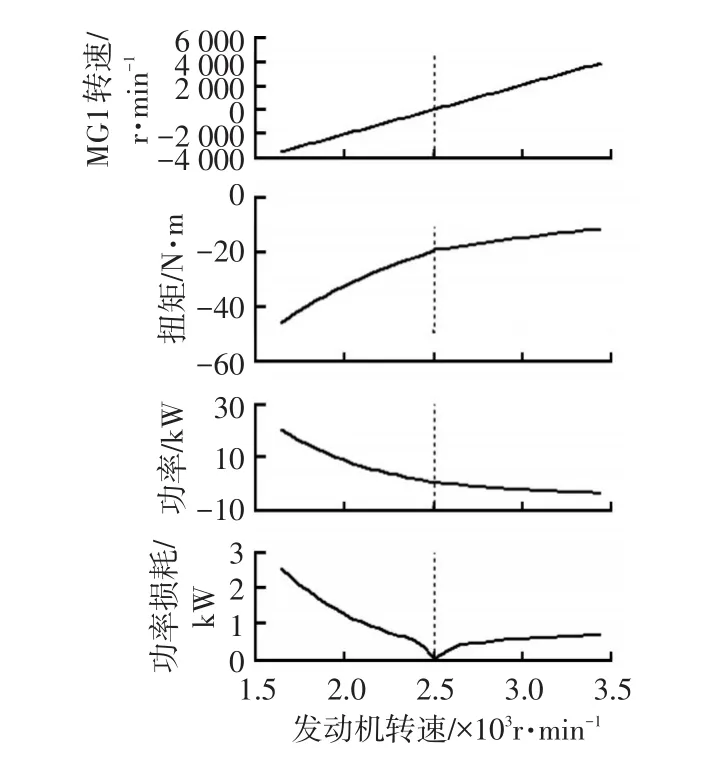
圖11 電機MG1工作點及功率損耗
圖12為電機MG2工作點及功率損耗的變化規律,圖中虛線為鎖止點。在鎖止點左側,隨發動機轉速的上升,MG2轉速與扭矩絕對值均下降,因而MG2的功率絕對值以及功率損耗也隨著逼近鎖止點而下降;在鎖止點,MG2進入停止工作狀態,功率損耗為0;在鎖止點右側,隨發動機轉速的上升,MG2轉速下降、扭矩上升,功率緩慢上升,功率損耗也隨之緩慢上升。
綜合前述分析,在鎖止點雖然發動機比油耗并非最佳,但電機MG1、電機MG2功率損耗為0,在鎖止點混合動力系統經濟性最優。
4 轉轂試驗驗證
如前所述,在經濟性最優模式下只需5.4 min即可將電池充電到常用的SOC上限并切換到不充不放模式。在高速工況下,除最初幾分鐘外,系統均工作在不充不放模式,所以針對不充不放模式的百公里油耗進行試驗驗證。

圖12 電機MG2工作點及功率損耗
如圖13和圖14所示,不充不放模式下經濟性最佳工作點對應的電機MG1轉速為0,說明混合動力系統工作在制動器B2鎖止模式經濟性最佳。圖13與圖8在發動機轉速為80 km/h和90 km/h時有一些差距,原因是整車的發動機實際比油耗與通過臺架試驗得到的發動機萬有特性有一定的差距。
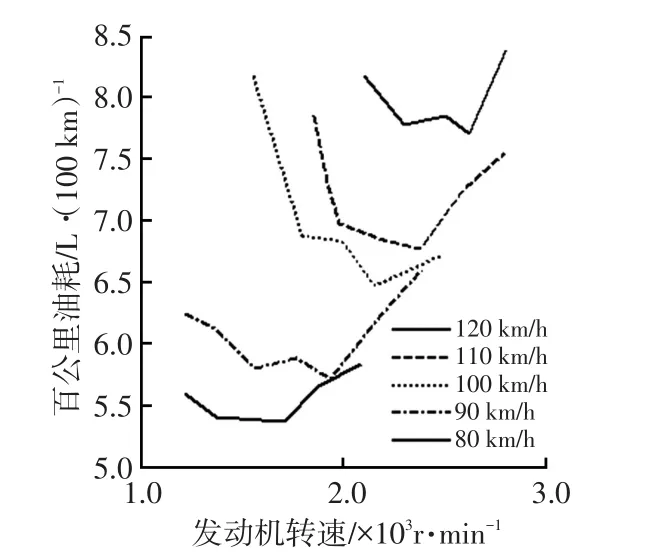
圖13 不充不放模式下發動機轉速與百公里油耗試驗結果

圖14 不充不放模式下發動機工作點及電池功率試驗結果
5 結束語
針對混聯式混合動力汽車的高速工況經濟性,綜合考慮發動機比油耗、電機功率損耗、電池損耗,提出一種基于窮舉法的經濟性最佳工作點設計方案。通過轉轂試驗表明,各車速下基于窮舉法設計的發動機工作點百公里油耗優于其它發動機工作點,本文的研究對同類的混聯式混合動力汽車改善高速工況經濟性具有一定的參考價值。
[1]吳迪,于明志.利用窮舉搜索法準確確定地下熱物性參數[J].工程熱物理學報,2017,38(04):822-827.
[2]HaishENG Yu,Jianwu Zhang,TongZhang.Control strategy design and experimental research on a fourshaftelectroniccontinuouslyvariabletransmission hy?brid electric vehicle.Proceedings of the Institution of Mechanical ENGineers,Part D:Journal of Automobile ENGineering.2012,226:1594-1613.
[3]王晨,趙治國,張彤,等.復合功率分流式e-CVT結構優化及驗證[J].中國公路學報,2015,28(3):117-126.
[4]劉釗,趙世琴,黃宗益.用杠桿模擬法建立行星變速器動力學模型[J].汽車工程,2000,22(4):274-277.
猜你喜歡
房地產導刊(2022年4期)2022-04-19 09:04:10
汽車工程師(2021年12期)2022-01-17 02:29:58
汽車工程師(2021年11期)2021-12-21 06:23:12
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
四川電力技術(2015年5期)2015-12-19 11:04:54
減速頂與調速技術(2015年4期)2015-03-16 03:39:41
汽車與新動力(2015年1期)2015-02-27 12:11:01
河南科技(2014年11期)2014-02-27 14:09:55
汽車與新動力(2014年2期)2014-02-27 12:10:15
