汽車主動(dòng)懸架作動(dòng)器故障診斷與控制補(bǔ)償方法*
2018-03-07 02:17:30陳雙鐘孝偉
汽車技術(shù) 2018年2期
陳雙 鐘孝偉
(遼寧工業(yè)大學(xué),錦州 121000)
1 前言
與被動(dòng)懸架相比較,主動(dòng)懸架能根據(jù)汽車的行駛條件對(duì)懸架系統(tǒng)的剛度和阻尼特性進(jìn)行動(dòng)態(tài)自適應(yīng)調(diào)節(jié),使懸架系統(tǒng)始終處于最佳減振狀態(tài)。目前,對(duì)主動(dòng)懸架控制的研究大部分是基于執(zhí)行器(作動(dòng)器)和傳感器完好無故障的條件設(shè)計(jì)的,一旦傳感器或作動(dòng)器出現(xiàn)故障,控制器將出現(xiàn)誤控制,影響乘坐舒適性。
近年來,容錯(cuò)控制研究在智能控制領(lǐng)域受到越來越多的重視[1],它可以確保在某些部件發(fā)生故障的情況下,系統(tǒng)仍按原有或略有降低(但可接受)的性能指標(biāo)完成控制任務(wù),如文獻(xiàn)[2]中采用全維狀態(tài)魯棒觀測(cè)器,對(duì)系統(tǒng)輸出進(jìn)行誤差估計(jì),并基于控制率重組的方法對(duì)汽車半主動(dòng)懸架進(jìn)行容錯(cuò)控制,雖然設(shè)計(jì)的觀測(cè)器能夠判斷出發(fā)生故障的時(shí)間,但是作動(dòng)器故障恢復(fù)存在延遲。文獻(xiàn)[3]設(shè)計(jì)了H∞控制器作為半主動(dòng)懸架常規(guī)控制器,基于故障診斷觀測(cè)器提出了作動(dòng)器在線故障估計(jì)算法,由完好作動(dòng)器補(bǔ)償單一作動(dòng)器故障的阻尼力損失,通過推導(dǎo)并結(jié)合半主動(dòng)懸架阻尼力的有界性,得出容錯(cuò)控制下各完好作動(dòng)器的補(bǔ)償阻尼力[4]。
本文首先建立二自由度1/4車輛模型,設(shè)計(jì)LQG控制率和卡爾曼狀態(tài)估計(jì)器,實(shí)現(xiàn)系統(tǒng)的狀態(tài)估計(jì),并以此為基礎(chǔ),在不考慮傳感器故障的前提下,對(duì)作動(dòng)器出現(xiàn)增益故障進(jìn)行實(shí)時(shí)在線診斷[5-6]。最后根據(jù)在線診斷結(jié)果,對(duì)LQG控制實(shí)施控制力的補(bǔ)償,確保性能指標(biāo)的最優(yōu)。
2 車輛建模與主動(dòng)懸架LQG控制
2.1 二自由度1/4車輛模型建立
建立二自由度1/4車輛懸架動(dòng)力學(xué)模型[7],如圖1所示。其中,x1為車身垂直位移;x2為車輪垂直位移;kt為輪胎等效剛度;m1為車身質(zhì)量;m2為車輪質(zhì)量;kf為彈簧剛度;cf為懸架阻尼;u為控制輸入。

圖1 二自由度1/4車輛懸架模型
根據(jù)牛頓運(yùn)動(dòng)定律,得到運(yùn)動(dòng)微分方程為:

將式(1)、式(2)轉(zhuǎn)換為主動(dòng)懸架空間表達(dá)式:
2.2 車輛懸架LQG控制器設(shè)計(jì)
對(duì)主動(dòng)懸架模型采用線性二次型最優(yōu)控制[7],考慮到汽車行駛平順性、操縱穩(wěn)定性和降低能耗,選取車身垂直加速度x?1、懸架動(dòng)撓度(x1-x2)、輪胎動(dòng)行程(x2-q)和控制輸入u作為性能評(píng)價(jià)指標(biāo)。采用狀態(tài)調(diào)節(jié)器,其指標(biāo)泛函為:

整理成標(biāo)準(zhǔn)二次型形式:

式中,q1、q2、q3、q4為性能評(píng)價(jià)指標(biāo)的加權(quán)系數(shù)為系統(tǒng)狀態(tài)變量的權(quán)重矩陣為系統(tǒng)控制輸入變量的權(quán)重矩陣;為系統(tǒng)干擾變量的權(quán)重矩陣為系統(tǒng)狀態(tài)變量與控制變量交叉項(xiàng)的權(quán)重矩陣為系統(tǒng)狀態(tài)變量與干擾變量交叉項(xiàng)的權(quán)重矩陣。
假設(shè)狀態(tài)變量X中各分量均可測(cè),則根據(jù)最優(yōu)控制律即可得到控制器的控制力:

從式(7)可以看出,只要求出最優(yōu)反饋增益矩陣,根據(jù)任意t時(shí)刻的狀態(tài)變量X(t)即可得到懸架的最優(yōu)控制力。
3 基于卡爾曼的主動(dòng)懸架故障檢測(cè)方法
故障檢測(cè)方法大致可劃分為基于信號(hào)處理的方法、基于解析模型的方法、基于知識(shí)的方法3類[8]。而基于解析模型的方法又可分為狀態(tài)估計(jì)方法和參數(shù)估計(jì)方法。目前,常用的狀態(tài)估計(jì)方法包括魯棒觀測(cè)器、模糊觀測(cè)器、神經(jīng)網(wǎng)絡(luò)觀測(cè)器、卡爾曼濾波法等。本文采用卡爾曼濾波算法對(duì)懸架系統(tǒng)故障進(jìn)行檢測(cè)。
卡爾曼濾波通過實(shí)時(shí)更新均值和協(xié)方差執(zhí)行濾波過程,基于卡爾曼濾波的狀態(tài)估計(jì)實(shí)際上是基于狀態(tài)變化為一階馬爾科夫過程假設(shè)的“預(yù)測(cè)—校正”的反饋控制器[9]。卡爾曼濾波可分為時(shí)間更新過程(預(yù)測(cè))和測(cè)量更新過程(校正)兩部分。時(shí)間更新過程根據(jù)當(dāng)前時(shí)刻的系統(tǒng)狀態(tài)獲得對(duì)下一時(shí)刻的先驗(yàn)估計(jì),測(cè)量更新過程將測(cè)量和先驗(yàn)估計(jì)相結(jié)合,獲得改進(jìn)的系統(tǒng)后驗(yàn)估計(jì)。
本文所建車輛系統(tǒng)的狀態(tài)方程與觀測(cè)方程為:

式中,x(k)、x(k-1)分別為k與(k-1)時(shí)刻的狀態(tài)矢量;y(k)為k時(shí)刻的觀測(cè)矢量;u(k)為k時(shí)刻的觀測(cè)噪聲;w(k)為k時(shí)刻系統(tǒng)噪聲。
由于系統(tǒng)是線性的,且系統(tǒng)噪聲呈高斯分布,容易得出卡爾曼濾波算法的時(shí)間更新和測(cè)量更新方程。
a.濾波時(shí)間更新
狀態(tài)預(yù)測(cè)方程:

誤差協(xié)方差預(yù)測(cè):

b.濾波測(cè)量更新
增益方程:

濾波方程:

誤差協(xié)方差更新:

4 作動(dòng)器故障在線診斷與控制補(bǔ)償
當(dāng)主動(dòng)懸架作動(dòng)器發(fā)生故障時(shí),控制系統(tǒng)可以根據(jù)車身垂向加速度、懸架動(dòng)撓度、輪胎動(dòng)載荷,利用卡爾曼濾波方法對(duì)懸架狀態(tài)變量進(jìn)行實(shí)時(shí)狀態(tài)估計(jì),并與懸架控制力的實(shí)際狀態(tài)變量比較得到殘差,通過與殘差門限值進(jìn)行比較,在線診斷出作動(dòng)器發(fā)生故障的時(shí)間,以便準(zhǔn)確地對(duì)控制力進(jìn)行實(shí)時(shí)補(bǔ)償,其工作原理如圖2所示。

圖2 在線診斷與控制補(bǔ)償方法工作原理
4.1 基于殘差的作動(dòng)器故障在線診斷
本文只考慮作動(dòng)器發(fā)生增益故障的情況。當(dāng)懸架作動(dòng)器發(fā)生增益故障時(shí),汽車主動(dòng)懸架系統(tǒng)的狀態(tài)空間模型也發(fā)生相應(yīng)變化,其模型表達(dá)式為:

式中,δ為主動(dòng)懸架作動(dòng)器故障增益。
則由式(3)和式(13)可得狀態(tài)誤差為:

將式(15)兩側(cè)同時(shí)積分可得狀態(tài)變量的狀態(tài)殘差:

由式(17)可知,當(dāng)時(shí)間t→∞時(shí),由于作動(dòng)器發(fā)生增益故障,殘差ΔX不趨向于零向量。
結(jié)合設(shè)計(jì)的卡爾曼濾波估計(jì)器可得主動(dòng)懸架作動(dòng)器增益估計(jì)值:

式中,pinv為求偽逆矩陣。
4.2 控制力補(bǔ)償方法
控制力補(bǔ)償在汽車主動(dòng)懸架作動(dòng)器發(fā)生故障后,不需要改變?cè)鲃?dòng)懸架LQG控制器結(jié)構(gòu),只需根據(jù)前面故障檢測(cè)與診斷出的信息對(duì)作動(dòng)器的力進(jìn)行補(bǔ)償。
由主動(dòng)懸架LQG控制器設(shè)計(jì)方法可知,無故障時(shí)作動(dòng)器輸出力應(yīng)為:

若設(shè)定作動(dòng)器發(fā)生增益故障時(shí)的控制力輸出為:

5 仿真與分析
在MATLAB中搭建車輛模型,模型仿真參數(shù)見表1。在B級(jí)路面,車速72 km/h工況下,設(shè)計(jì)LQG控制器,并人為設(shè)定第5 s起作動(dòng)器發(fā)生0.2倍的增益故障,如圖3所示。

表1 車輛模型參數(shù)

圖3 作動(dòng)器故障增益
利用前文所述卡爾曼濾波估計(jì)方法對(duì)所設(shè)定作動(dòng)器增益故障下車輛系統(tǒng)的狀態(tài)變量進(jìn)行估計(jì),并與狀態(tài)變量真實(shí)值進(jìn)行比較,得到的殘差信息如圖4所示。由圖4可以看出,在t=5 s時(shí)卡爾曼估計(jì)器得到的狀態(tài)變量估計(jì)值與狀態(tài)變量真實(shí)值出現(xiàn)明顯差別,表明此時(shí)作動(dòng)器開始出現(xiàn)故障。根據(jù)作動(dòng)器出現(xiàn)故障時(shí)刻對(duì)故障增益進(jìn)行估計(jì),得到故障增益估計(jì)值為0.2。

圖4 懸架性能殘差
在此基礎(chǔ)上,利用前文所述的控制力補(bǔ)償方法對(duì)主動(dòng)懸架控制力實(shí)施補(bǔ)償,得到的無故障主動(dòng)懸架、故障不加容錯(cuò)控制和故障加容錯(cuò)控制的車輛性能指標(biāo)對(duì)比曲線如圖5所示,均方根值對(duì)比如表2所示。
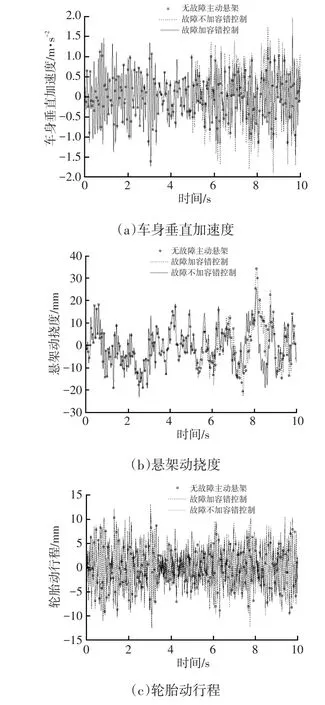
圖5 懸架性能對(duì)比

表2 懸架性能均方根值對(duì)比
從圖5及表2可以看出,在作動(dòng)器發(fā)生增益故障時(shí)刻t=5 s起,相對(duì)完好無故障狀態(tài)的主動(dòng)懸架,故障懸架的控制效果明顯變差,而增加了控制補(bǔ)償后的容錯(cuò)控制效果與無故障狀態(tài)控制效果相近,明顯提高了主動(dòng)懸架控制器的可靠性。
6 結(jié)束語
本文基于卡爾曼濾波算法對(duì)汽車主動(dòng)懸架作動(dòng)器發(fā)生故障時(shí)的容錯(cuò)控制展開研究。通過設(shè)計(jì)的卡爾曼估計(jì)器對(duì)懸架系統(tǒng)的狀態(tài)變量進(jìn)行估計(jì),實(shí)現(xiàn)對(duì)出現(xiàn)作動(dòng)器故障增益的情況進(jìn)行在線診斷,并對(duì)故障條件下的主動(dòng)懸架LQG控制實(shí)施控制力補(bǔ)償,提高主動(dòng)懸架控制的可靠性。研究結(jié)果表明,所設(shè)計(jì)的狀態(tài)估計(jì)器能夠很好地完成作動(dòng)器的故障檢測(cè)和實(shí)施在線檢測(cè),控制力補(bǔ)償方法能夠有效地確保主動(dòng)懸架控制的功能,滿足汽車行駛平順性的要求。
[1]張麗萍,弓棟梁.基于H2/H∞控制的汽車主動(dòng)懸架被動(dòng)容錯(cuò)控制[J].汽車技術(shù),2017(11):44-49.
[2]楊柳青,陳無畏,汪洪波.基于殘差信息的汽車液壓主動(dòng)懸架故障診斷與隔離研究[J].中國(guó)機(jī)械工程,2012,23(14):1746-1752.
[3]高振剛,陳無畏,汪洪波,等.基于故障補(bǔ)償?shù)钠嚢胫鲃?dòng)懸架容錯(cuò)控制[J].汽車工程,2016,38(6):705-715.
[4]Fischer D, B?rner M, Schmitt J, et al.Fault Detection for Lateral and Vertical Vehicle Dynamics[J].Control Engineering Practice,2007,15(3):315-324.
[5]Li H,Gao H,Liu H,et al.Fault-tolerant H Control forActiveSuspension VehicleSystemswith Actuator Faults[J].Proceedings of the Institution of Mechanical Engineers Part I Journal of Systems & Control Engineering,2011,226(3):348-363.
[6]Kim H,Lee H.Model-based Fault-tolerant Control for an Automotive Air Suspension Control System[J].Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering,2011,225(11):1462-1480.
[7]喻凡,林逸.汽車系統(tǒng)動(dòng)力學(xué)[M].北京:機(jī)械工業(yè)出版社,2017.
[8]陳雙,宗長(zhǎng)富.車輛主動(dòng)懸架的遺傳粒子群LQG控制方法[J].汽車工程,2015,37(2):189-193.
[9]陳學(xué)文,周越,張進(jìn)國(guó).考慮側(cè)傾影響的汽車橫擺角速度與質(zhì)心側(cè)偏角濾波估計(jì)[J].汽車技術(shù),2017(11):40-43.
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
汽車維修與保養(yǎng)(2015年12期)2015-04-18 07:51:49
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維修與保養(yǎng)(2015年2期)2015-04-17 01:30:34
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
