電輔助式混合動力礦用自卸車驅動系統設計與仿真研究*
2018-03-07 02:17:28韓愛國孟開創張瑞鵬吳浩
汽車技術 2018年2期
韓愛國 孟開創 張瑞鵬 吳浩
(武漢理工大學 現代汽車零部件技術湖北省重點實驗室 汽車零部件技術湖北省協同創新中心,武漢 430070)
1 前言
目前,傳統礦用自卸車主要分為載重百噸級以上大型礦用自卸車和百噸級以下中小型礦用自卸車,由于大型礦用自卸車造價和使用成本十分昂貴,因此主流礦山企業多使用中小型礦用自卸車。而隨著礦山生產能力的不斷擴大,期望這類礦用自卸車動力性能提高以提升運輸效率,通常為此購置更大馬力發動機,但存在著產品選擇范圍小、成本呈階梯式增長、油耗大、排放差等問題。混合動力技術是解決上述問題的有效途徑,大型混合動力礦用自卸車可采用電傳動方式,發動機帶動發電機發電提供給車輪上的輪轂電機來驅動車輛行駛[1,2];而小噸位礦用自卸車由于結構上的限制并不適用這種驅動方式,小型礦用自卸車主要采用串聯式及并聯式混合動力驅動方式[3,4],大多參考乘用車使用的混合動力系統結構對驅動系統進行重新設計,但動力耦合結構復雜,開發周期長且成本較高。
為減少開發成本、開發周期及便于工程實現,在混合動力礦用自卸車驅動系統設計中,相關研究人員考慮在原車結構基礎上進行改進,如,文獻[5]中采用雙軸獨立系統構成了復合式四驅混合動力汽車,較大程度上減少了原型車的改動費用;文獻[6]針對單軸并聯式混合動力礦用自卸車設計了電輔助式控制策略,根據不同要求能夠改善整車性能。本文在前人研究的基礎上,對某款由發動機驅動的6×6傳統礦用自卸車進行改進,采用前橋電機驅動,其余各橋仍保留原有傳動系統的結構,構成并聯式混合動力礦用自卸車,該方法對原車結構改動較小,簡單易行,并通過合理的控制策略確保了整車的動力性和經濟性。
2 混合動力礦用自卸車結構形式和設計要求
2.1 電驅動系統結構設計
原型車采用6×6貫通式驅動橋結構,發動機輸出的動力經由分動器分配到前橋和中后橋,其驅動系統結構如圖1所示,其技術參數如表1所列。

圖1 原型車驅動系統結構

表1 原型車基本參數
為了在上下坡頻繁的礦山環境下實現上坡提擋增速,減少運輸時間,對原車的驅動系統進行改造,取消前后軸之間的分動器,在前橋加入電機,使前橋由電機單獨驅動,中后橋保留原有的傳動系統結構,仍由原來的發動機提供動力。兩套獨立的驅動系統在混合驅動模式下的牽引力是相互結合的,這種驅動力結合式混合動力汽車屬于并聯式混合動力汽車的一種[6,7]。由于發動機與電動機之間沒有任何機械式的連鎖裝置,能夠充分發揮各自的特性,提高車輛的動力性能。此外,電機在下坡制動時切換到發電模式時還能實現制動能量的回收。改造后的電輔助式混合動力礦用自卸車驅動系統結構如圖2所示。

圖2 電輔助式混合動力礦用自卸車驅動系統結構
2.2 混合動力礦用自卸車設計要求
本文研究的非公路礦用自卸車主要用于露天礦山的礦石運輸,工作特點為承載質量大,行駛距離較短,一般不考慮其加速性能[8]。礦區道路多為臨時修建路面,特點為坡度大且上下坡頻繁,車輛經常處于重載上坡的工作狀態。在進行混合動力礦用自卸車設計的過程中,主要考慮其滿載爬坡性能要求。
結合礦用自卸車使用特點和原車動力性能,混合動力礦用自卸車應滿足以下要求:在滿載運輸的上坡階段電機需提供助力,原車在行駛過程中需要爬10%和20%兩個坡道,在坡道上主要使用2~4擋,車速約為4~10 km/h,而要求混合動力車應能在原有坡道上提擋增速,使用3~5擋,車速達到8~14 km/h。另外要求在下坡制動時電機實現能量回收,以確保整車燃油經濟性。
3 電驅動系統部件參數設計
3.1 驅動電機參數設計
3.1.1 電機轉矩的確定
勻速爬坡時,車輛進入電機輔助驅動模式,整車所需動力由電機和發動機共同提供,兩個動力源所能提供的總驅動力應大于此時車輛所受到的行駛阻力,即滾動阻力、坡道阻力和空氣阻力之和。整車需求的驅動力為:

式中,Ft為作用于車輪上的驅動力;uα為在坡度角α=arctani(i為爬坡度)下爬坡時的車速;g為重力加速度;ma為滿載質量,由于混合動力車型在原車型的基礎上取消了分動器但增加了電機和電池組,根據經驗和相關文獻[9],取ma=52 500 kg。
由于發動機為主要動力源,電機僅提供輔助動力,因此整車所需驅動力首先由發動機所能提供的最大驅動力來滿足,不足的部分由電機來補償。發動機所能提供的驅動力為:
式中,Ft_e為發動機扭矩傳至車輪上所產生的驅動力;Ttq為發動機扭矩;ig為爬坡時所使用擋位的傳動比。
電機所能提供的驅動力應滿足Ft_m≥Ft-Ft_e,折算為電機輸出轉矩為;根據設計要求,混合動力礦用自卸車在10%坡道上最高使用5擋,20%坡道上最高使用3擋,因此電機最大轉矩應滿足:,結合發動機萬有特性計算得到所需電機扭矩分別為T10%_5=960.2 N·m,T20%_3=1057.4 N·m,取Tm≥1 100 N·m。
3.1.2 電機功率的確定
為實現在坡道上提擋增速的目標,不僅需要考慮兩個動力源所能提供的總驅動力能否滿足車輛以高擋位行駛時整車的驅動力需求,還應考慮以更高車速爬坡時,兩個動力源所能提供的總功率能否滿足此時整車的功率需求。
根據爬坡性能要求計算整車需求總功率為:

式中,Pα為在坡度角α下爬坡時整車需求總功率。
爬坡時整車需求的驅動功率主要由發動機來提供,不足的部分由電機來補償,則電機所能提供的輸出功率應滿足Pm≥Pα-Pe(Pe為發動機所能提供的功率)。根據設計要求,混合動力汽車在10%的坡道上能以14 km/h的車速勻速爬坡,在20%的坡道上以8 km/h的車速勻速爬坡。因此,電機所能輸出的功率應滿足結合發動機萬有特性,計算得到所需電機功率分別為Pm_10%=52 kW和Pm_20%=38 kW。
根據計算結果在廠家提供的電機中選擇一款驅動電機,其參數如表2所示。
3.2 動力電池組參數設計
動力電池組在電機輔助驅動時提供電能,同時在車輛下坡制動過程中存儲電機回收的能量。本文選擇能量密度大和功率密度較高的鋰電池組,以減小電池組重量及體積,滿足大功率充放電需求。電池組的參數設計主要考慮電壓等級和容量,其中電壓等級必須覆蓋電機的電壓工作范圍[10],確定動力電池組的技術參數如表3所示。

表3 動力電池組技術參數
4 原車仿真模型建立與試驗驗證
首先利用原車參數在軟件Cruise[11]中建立整車模型,然后建立各擋最大爬坡度和礦用自卸車循環工況的仿真計算任務,原車模型如圖3所示。
4.1 爬坡性能分析
圖4為原車各擋(Ⅰ~Ⅸ)最大爬坡度。從圖4可以看出,2擋最大爬坡度為26.45%,3擋最大爬坡度為19.68%;4擋最大爬坡度為12.54%,5擋最大爬坡度為9.17%。根據仿真結果,在爬10%的坡道時,駕駛員最多只能使用4擋;爬20%的坡道時,最多只能使用2擋,與實際情況相符。原車滿載下爬坡度的仿真結果與試驗數據對比如表4所示。
4.2 循環工況仿真
非公路礦用自卸車的工作過程包括裝料—滿載運輸—卸料—空車回程—待機裝料5個步驟。單趟運距為3 km,重載上坡占單趟運距的60%(1.8 km),整車運行工況為:在礦坑內裝滿料后平路運行300 m,然后爬緩坡1 500 m(坡度10%),再平路運行300 m,然后爬陡坡500 m(坡度20%),到達坡頂后平路運行400 m,卸完料后空車沿原路返回。礦用自卸車循環工況曲線如圖5所示。
從圖5可看出,礦用自卸車的循環工況比較單一,通過采集礦用自卸車在實際工作過程中的負荷、常用車速以及常用擋位等信息,得到行駛在各路段下的運行數據,在礦區實際循環道路上以實車按照實測運行數據行駛來進行循環工況油耗試驗。表5為礦用自卸車在實際循環工況下主要運行數據。
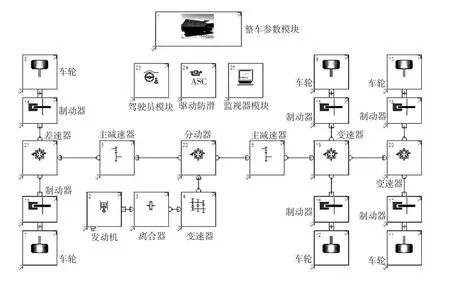
圖3 原車模型
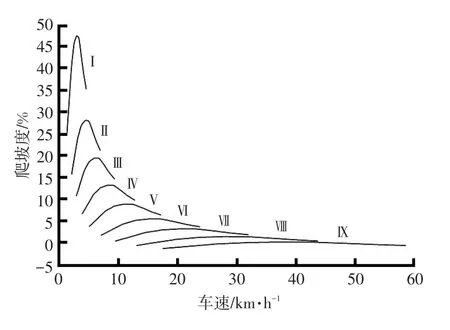
圖4 原車各擋最大爬坡度仿真結果
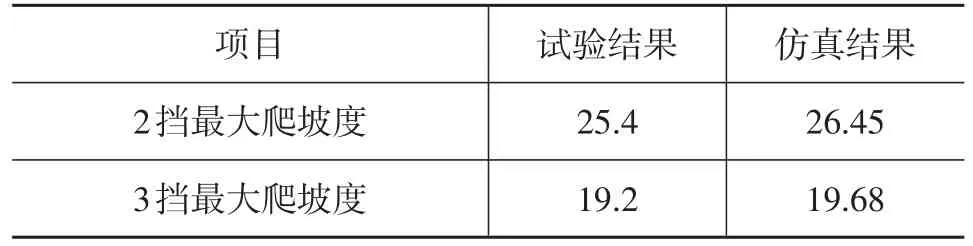
表4 原車滿載下爬坡度的仿真結果與試驗結果對比 %

圖5 循環工況曲線
在軟件Cruise中建立以上所設計的礦用自卸車循環工況并設定相應計算任務,進行仿真得到綜合百公里油耗,仿真結果與試驗數據的對比如表6所示。
由表4和表6可知,原車最大爬坡度和循環工況下百公里綜合油耗的仿真結果與試驗結果的誤差都在5%以內,驗證了在軟件Cruise中建立的整車模型的準確性。

表5 礦用自卸車實際循環工況下主要運行數據
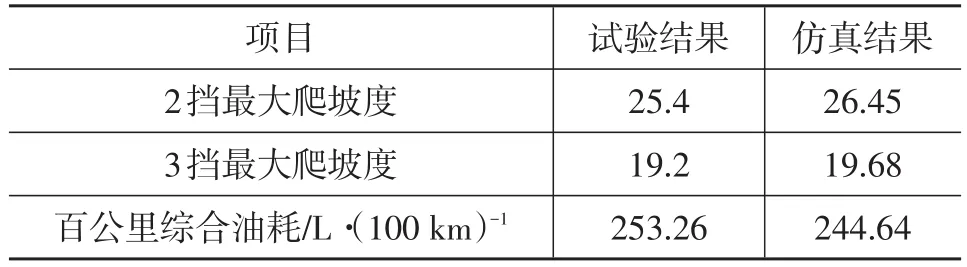
表6 循環工況下仿真與試驗結果對比 %
5 混合動力礦用自卸車控制策略
控制策略的主要作用是控制混合動力系統根據需求和實際情況切換到不同的工作模式下。在種類繁多的控制策略中,基于規則的邏輯門限值控制策略簡單可靠,在混合動力汽車中應用十分廣泛,易于在智能化程度不高的工程機械上實現[12]。結合非公路礦用自卸車的使用特點,設計了基于邏輯門限值的電輔助式控制策略。
控制策略的基本原理為,控制系統采集加速踏板信號、制動踏板信號、車速和電池荷電狀態SOC等,結合輸入信號和設定的參數門限值完成控制邏輯運算,控制發動機的開關和輸出轉矩,控制電機的開關、模式切換和輸出轉矩以及機械制動系統的輸出轉矩。
由于原車上傳感器很少,依據現階段所能提供的相關信號將整車驅動模式下的工作狀態劃分為爬坡和未爬坡狀態。礦用自卸車在礦區坡道上實際行駛過程中,車速一般不超過20 km/h,且駕駛員通常將加速踏板完全踩下,因此以車速和加速踏板開度信號作為兩種工作狀態的切換點。電輔助式控制策略的控制邏輯如圖6所示,描述如下:
a.驅動工況下,當車速大于20 km/h時,判定車輛未處于爬坡工作狀態,整車需求轉矩全部由發動機提供。
b.驅動工況下,當加速踏板開度大于85%,并且車速低于20 km/h時,判定車輛處于爬坡狀態,整車有大扭矩需求。若此時電池SOC大于下限值,則電驅系統投入工作,進行輔助驅動。
c.制動時,若電池SOC小于上限值,則電機切換到發電模式,提供再生制動力矩,進行制動能量回收并與機械制動一起構成聯合制動。
d.制動時,若電池SOC大于上限值,為避免電池過充,此時只允許機械制動。
利用軟件Cruise中的Function模塊建立控制策略及混合動力礦用自卸車仿真模型,如圖7所示。

圖6 電輔助式控制策略控制邏輯
6 仿真結果與分析
6.1 爬坡性能分析
混合動力礦用自卸車的各擋爬坡度仿真結果如圖8所示。對比原車的爬坡度仿真結果可以看出,在車速低于20 km/h、車輛處于爬坡狀態時,電機提供輔助動力,使整車的爬坡性能得到提升。其中3擋最大爬坡度為22.12%,4擋最大爬坡度為15.81%,5擋最大爬坡度為11.5%。車速大于20 km/h時,電驅系統不參與驅動,由于礦山道路本就顛簸,此時電機退出工作可能導致的車速波動不會對乘員舒適性有較大影響。因此,混合動力車在10%和20%的坡道上能使用3~5擋,車速也可相應提升。

圖7 混合動力礦用自卸車模型
6.2 循環工況仿真結果
圖9為混合動力礦用自卸車在循環工況下的車速、發動機輸出轉矩、電機輸出轉矩和動力電池組SOC隨車輛行駛距離的變化曲線。從圖9可看出,在10%的坡道上,車輛能以5擋14 km/h的速度行駛,在20%的坡道上,以3擋8 km/h的車速行駛,滿足動力性的要求。結合發動機和電機轉矩曲線可以看出,在滿載上坡的過程中,電機提供輔助動力,在平路上行駛時,發動機負荷較低,電機不參與工作;在下坡制動時,電機進入發電模式,提供一部分制動力矩,實現制動能量回收。從電池組荷電狀態曲線可以看出,在上坡電機提供輔助動力階段,電池組處于放電狀態,向電機輸出能量,SOC值減小;在下坡電機進行制動能量回收階段,電池組處于充電狀態,SOC值增大。

圖8 混合動力礦用自卸車各擋爬坡度仿真結果

圖9 混合動力礦用自卸車循環工況下仿真結果
仿真得到混合動力礦用自卸車在循環工況下油耗為216.92 L/100 km,電耗為128.18 kW·h/100 km。根據標準GB/T 19754給出的重型混合動力汽車等效燃料消耗量的定義,將耗電量轉換為燃料消耗量,得到等效百公里燃油消耗量為259.36 L/100 km。
圖10為混合動力礦用自卸車在滿載穩態行駛工況下仿真結果,由圖10可看出,在同一車速下,擋位越高發動機油耗越低;在同一擋位下,車速過高會導致油耗增加。由此可知,提擋增速不僅節約了運輸時間,還能在一定程度上降低燃油消耗量,再加上電機的制動能量回收,使整車動力性得到提升的同時保證了燃油經濟性,循環工況下的綜合油耗相比原車仿真結果降低了6%。
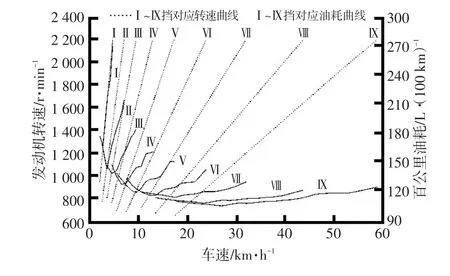
圖10 混合動力礦用自卸車等速百公里油耗曲線
7 結束語
在保證對原型礦用自卸車較小改動的基礎上,設計了前軸電驅、后軸發動機驅動的電輔助式混合動力礦用自卸車。根據整車性能要求和實際運行工況,對電驅系統的電機和電池進行了匹配選型,然后利用軟件Cruise搭建合理的整車模型和控制策略,在所設計的循環工況下進行了仿真計算。仿真結果表明,所設計的混合動力礦用自卸車能夠在原有坡道上實現提擋增速,在10%和20%的坡道上可以在比原車高一個擋位下行駛,行駛速度亦達到要求。高擋位的使用降低了發動機的油耗以及電機下坡制動能量回收,使整車在動力性得到提升的同時保證了燃油經濟性。混合動力礦用自卸車的設計滿足要求,為實車應用提供了理論依據。
[1]劉廷安.國外大型礦用汽車最新發展和未來趨勢[J].礦業裝備,2013(7):34-39.
[2]Ehsan Esfahanian,John A.Meech.Hybrid Electric Haulage Trucks for Open Pit Mining[C]//Automation in Mining,Mineral and Metal Processing,2013.
[3]Omar Hegazy,et al.Modeling,analysis and feasibility study ofnew drivetrain architecturesforoff-highway vehicles[J].Energy,2016(109):1056-1074.
[4]馬東兵,朱福堂,顧力強.四輪驅動混合動力汽車能量管理策略仿真[J].傳動技術,2013(3):13-18.
[5]牟春燕,陳少華,趙萬勝.混合動力礦用汽車電力輔助控制策略研究[J].礦山機械,2007(9):74-76.
[6]胡先鋒.并聯混合動力汽車動力系統優化及控制策略研究[D].合肥:合肥工業大學,2009.
[7]WANG C L,YIN C L,ZHANG T,et al.Powertain Design And Experiment Research Of A Parallel Hybrid Electric Vehicle[J].International Journal Of Automotive Technology,2009,10(5):589-596.
[8]劉忠政.重型混合動力汽車動力性與經濟性的仿真分析[D].洛陽:河南科技大學,2014.
[9]王維.插電式四驅混合動力汽車的匹配與仿真建模[D].重慶:重慶大學,2015.
[10]趙航,史廣奎.混合動力電動汽車技術[M].北京:機械工業出版社,2012.
[11]岳鳳來,張俊紅,周能輝,等.基于CRUISE的純電動轎車性能仿真與試驗研究[J].汽車工程,2014,36(6):669-672.
[12]Theo Hofman, Maarten Steinbuch.Rule-based energy managementstrategies forhybrid vehicles[J].Electric and Hybrid Vehicles,2007,1(1).
