汽車視野二維角度坐標法的二次開發及應用
2018-03-07 02:17:27姚樹寅王洋馮斌張健冉云飛
汽車技術 2018年2期
姚樹寅 王洋 馮斌 張健 冉云飛
(1.中國重型汽車集團技術發展中心,濟南 250102;2.重慶長安汽車工程研究總院,重慶 401120;3.西安雙特智能傳動有限公司,西安 710119;4.弗吉亞(重慶)汽車部件系統有限公司,重慶 401122)
1 前言
視野分析和校核是汽車研發過程中的重要工作。隨著三維設計軟件的廣泛應用,通過3D數據可以立體直觀地進行駕駛員視野的相關分析,這也是目前普遍采用的方法。這種方式立體、形象、準確度高,但作圖過程較為復雜,由于大量3D數據的存在,生成的線條在一定程度上干擾視覺,表達略顯凌亂。而理論上,如果不考慮光線眩目或亮度不足等外部影響,在視線可及距離內,目標物是否方便可見通常只與其所處的視線角度及其所占據的視角大小有關。McIsaac,E.J.等在1995年就提出了一種二維角度坐標圖[1]的表達方法。
二維角度坐標圖能夠包含大量的視野信息,只需2個角度參數即可表達目標點,與3D數據分析相比,在表達上更加簡潔直觀。但到目前,其研究和應用較少,原因包括:生成二維角度坐標圖需進行大量數據換算,如無合適的方法,將非常繁瑣耗時;利用3D數據可直接實現各種視野分析,視野分析通常只針對某一局部開展,也就不需要生成完整的二維角度坐標圖。本文嘗試開發了二維角度坐標圖的快速生成程序,并對其應用可行性進行了探討。
2 二維角度坐標法
McIsaac,E.J.等提出,人的視野可理解為如圖1所示模型[2]。人處在以人眼為中心的球體內部,目標點分布在球面上,人通過眼睛及頭部的轉動找到目標點。這樣,以眼點(球心)為參考,連接每個目標點的視線都可以通過水平方位角和縱向舉升角來表示,從而將三維直角點坐標轉換為二維角度坐標,簡化問題。
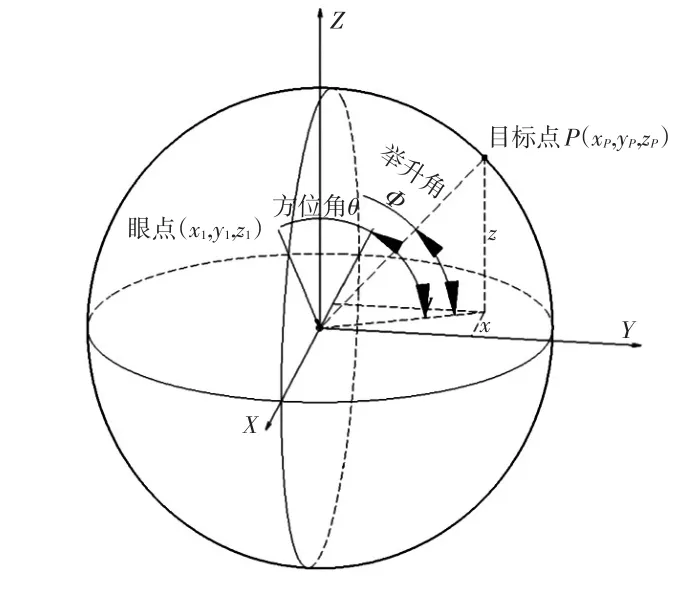
圖1 二維角度坐標法視野模型
需要注意的是,該模型是建立在視野分析校核只與角度有關的基礎上的,因為方位角和舉升角只能確定視線的方向,并不能完全確定目標點位置。這是與實際情況相符的:對于方位角和舉升角相同,與眼點距離不同的目標點,人只能觀察到近處的目標點,而較遠的目標點則會被遮擋。
同樣,在進行人機布置和視野分析時,特別是直接視野分析時,通常只需分析目標物是否在舒適視角區域內、是否被遮擋等,只需確定視線方向即可進行,因此,通過方位角和舉升角可以實現對視野的分析。
二維角度坐標圖中包含著大量的視野信息,但其生成過程需要大量的數據計算。因此,開發二維角度坐標圖的自動生成程序,對視野分析非常有利,對于二維角度坐標法的應用和推廣也具有積極意義。
3 二維角度坐標圖自動生成程序開發分析
3.1 輸入條件
程序的核心功能是實現點的坐標變換。方程未知的曲線無法進行坐標變換,因此需將待變換的曲線進行點化處理:在曲線上提取足夠的點,利用這些點進行坐標變換。
同時,完成坐標變換需要參考點,視野分析的參考點一般是眼點。因此,輸入條件需要包含眼點及待轉換的目標點或曲線。
3.2 變換規則
為保持與乘用車規定坐標系[3]和駕駛員習慣一致,規定從眼點沿車輛X軸負方向作射線,其方位角、舉升角均為零,其右側目標的方位角為正,左側目標的方位角為負,其上方目標的舉升角為正,下方目標的舉升角為負。
在三維直角坐標系中,設眼點E1的坐標為(x1,y1,z1),目標點P的坐標為(xP,yP,zP)。令x=xP-x1、y=yP-y1、z=zP-z1,則P相對于E1的坐標為(x,y,z)。則方位角θ、舉升角Φ分別為:

3.3 輸出結果
坐標轉換的直接結果為二維坐標點,將這些點連接成曲線,就完成了對輸入曲線的變換。
4 程序代碼
根據上述分析結果,本文采用CATIA V5R21作為設計工具,以VB6.0作為開發工具完成程序開發。
下面對程序部分核心代碼進行說明,本文省去了部分對象的定義語句,保留了功能代碼。
4.1 調用CATIA程序
首先調用CATIA程序,并將CATIA當前活動文檔的part文件定義為工作對象[4]。

4.2 提取輸入條件
采取的輸入方式是選擇輸入,這種方法便于控制輸入對象。

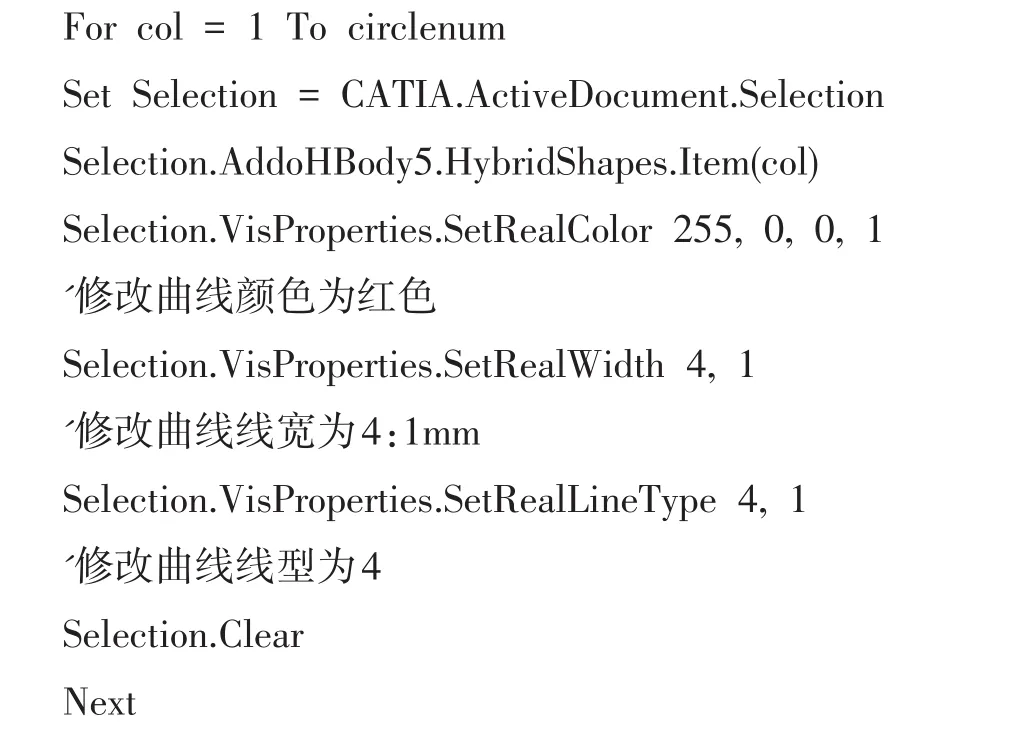
4.3 將選擇的對象加入列表
將上節中選擇的對象加入List1,以便循環引用。
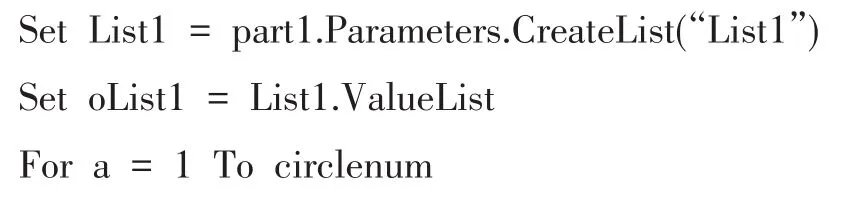
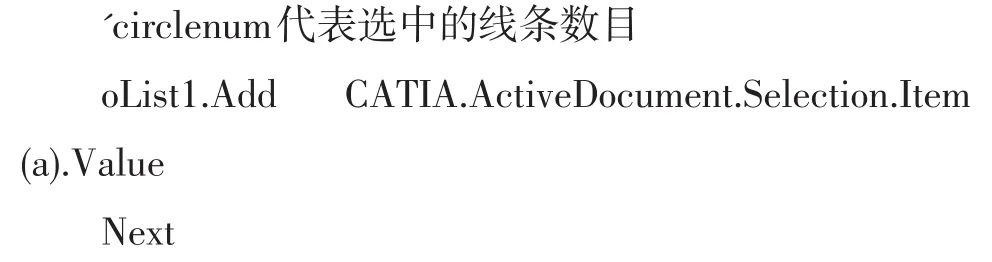
4.4 將選中的線點化
將List1中的線點化,每條線上提取大量點以便將輸入的線進行坐標變換。

4.5 坐標變換
根據前文對目標點和眼點等的坐標設定及推導的變換規則,將上面提取的點進行坐標變換。

4.6 新建點
按變換后的坐標值新建點。

4.7 連結曲線
將坐標變換后的點連結成曲線,就得到了曲線的二維角度坐標圖。

4.8 更改曲線屬性
為便于區分最終結果,可以將曲線的部分屬性進行調整。
4.9 生成程序
在VB程序界面,引用CATIA資源庫,將代碼進行打包生成程序,得到的程序界面如圖2所示。
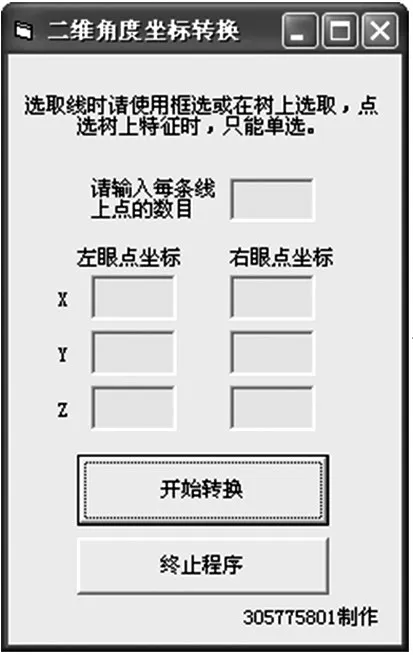
圖2 程序界面
5 程序運行及結果討論
5.1 程序運行步驟
a.運行CATIA軟件,打開存儲待轉換曲線的文件。本文以輸入圖3所示的各邊界曲線為例。

圖3 待轉換的特征曲線示意
b.運行二維角度坐標轉換程序,并將相關參數輸入程序界面。需指出的是:每條輸入線上點的數目會影響最終得到的曲線,點的數目越多,轉換得到的曲線越精確。
c.在CATIA程序界面選擇需轉換的曲線,程序自動開始運算。
d.程序自動完成運算,生成的二維角度坐標圖結果見圖4。

圖4 轉換結果
5.2 結果驗證
為檢驗這種方法的準確性,從3D圖中任取一點進行對比驗證,驗證結果如圖5所示。由圖5可知,3D圖和二維角度坐標圖中對應點的方位角和舉升角測量結果相同,表明這種轉換方式是正確的。
5.3 結果分析
從轉換得到的二維角度坐標圖(圖4)中,還可以得到以下結論:
a.二維角度坐標圖能夠直觀地區分單眼視野、雙眼視野以及雙單眼視野[5]。對分析單眼盲區、雙眼盲區(如A柱障礙角、組合儀表可視性)等非常方便。
圖6所示為按照SAE1050中規定的方法和利用二維角度坐標圖獲得的左A柱障礙角的分析結果,兩種方法分析結論一致,但后者的表達更加直觀,并能分別測得該位置左、右眼點的左A柱單目障礙角。
b.二維角度坐標圖直接地表達出各特征所占據的視角大小,并評價其可視性。
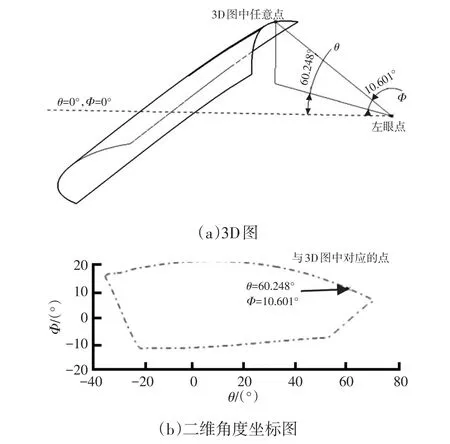
圖5 曲線上任意點的方位角和舉升角結果對比

圖6 左A柱障礙角的分析結果對比
在圖4中,可以直接估讀出組合儀表在左眼視野中所占據的視野角度范圍:方位角約-15°~20°,舉升角約-25°~-15°。
圖7所示為以3D數據方法和利用二維角度坐標圖測得的組合儀表可視性分析結果。其中,θL為左側方位角;θR為右側方位角;ФT為上方舉升角;ФD為下方舉升角。估讀得到的結果與兩種方法分析得到的結果一致,但在二維角度坐標圖中可以直接測量得到,過程大大簡化。

圖7 左眼點組合儀表視野分析結果對比
c.二維角度坐標圖反映了距離對視角大小的影響。如對稱布置的左、右前門玻璃,由于與眼點的距離不同,在視野中所占據的視角范圍也不相同。
5.4 二維角度坐標圖的其他作用
二維角度坐標圖能夠幫助理解不同因素對視野的影響。不同人體及其位置的眼點視野角度如圖8所示,它清晰地反映了人體位置和高度對視野的影響:對于同一人體,座椅前端位置前方視野更好,但組合儀表等內部視野舒適性不如座椅后端;對于同一位置的不同人體,高百分位人體的下視野優于低百分位人體,上視野和組合儀表等內部視野較低百分位人體差。二維角度坐標圖反映的這些信息,對于理解和輔助視野設計有很好的指導作用。
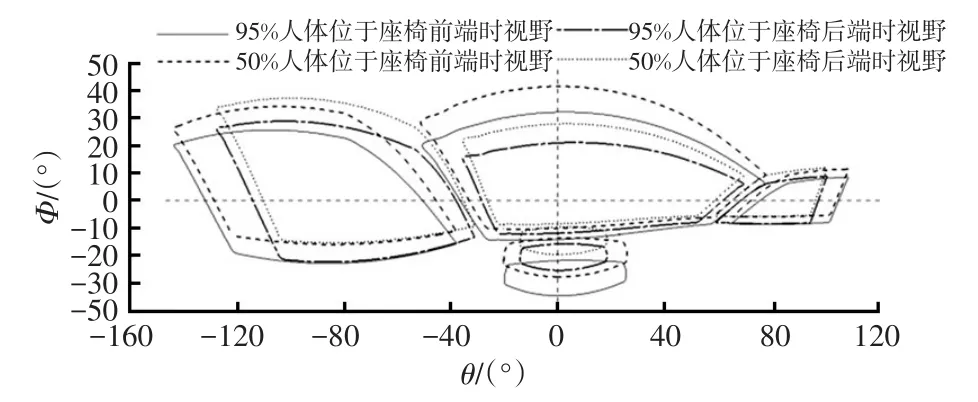
圖8 不同人體及其位置的眼點視野角度
6 結束語
二維角度坐標圖包含大量的視野信息,為汽車視野分析提供了除3D數據方法外的另一種選擇,且分析更為簡便,在表達上更為直觀。二維角度坐標圖的自動計算和生成,省去了繁瑣的操作過程,便于二維角度坐標圖的應用。
[1]McIsaac EJ,BhiseVD.Automotive Field of View Analy?sis Using Polar Plots[C]//International Congress&Ex?position.1995.
[2]Bhise V D.汽車設計中的人機工程學[M].北京:機械工業出版社,2014.
[3]中國國家標準化管理委員.汽車駕駛員前方視野要求及測量方法:GB 11562—2014[S].2014.
[4[胡挺,吳立軍.CATIA二次開發技術基礎[M].北京:電子工業出版社,2006.
[5]Society of Automotive Engineers.Describing and Mea?suring the Driver's Field of View:J1050[S].2003.
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
人大建設(2019年12期)2019-05-21 02:55:44
電子制作(2018年18期)2018-11-14 01:48:24
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
環球時報(2017-03-30)2017-03-30 06:44:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生(2015年3期)2015-11-19 02:53:32
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
政治與法律(2014年11期)2014-03-01 02:20:40
