遠(yuǎn)程自主接近軌道設(shè)計(jì)技術(shù)
2018-03-09 01:03:11鄭莉莉郝照平賀元軍解永鋒王傳魁
宇航總體技術(shù) 2018年1期
關(guān)鍵詞:設(shè)計(jì)
鄭莉莉,郝照平,賀元軍,解永鋒,王傳魁
(1. 北京宇航系統(tǒng)工程研究所,北京 100076; 2. 中國運(yùn)載火箭技術(shù)研究院,北京 100076;3. 中央軍委裝備發(fā)展部載人航天工程辦公室,北京 100083)
0 前言
目前交會(huì)對(duì)接中多為合作目標(biāo),例如我國于2011年9月至2013年6月期間完成的天宮一號(hào)與神舟八號(hào)、九號(hào)和十號(hào)飛船的3次交會(huì)對(duì)接任務(wù),均是基于地面或航天員對(duì)目標(biāo)航天器天宮一號(hào)的運(yùn)行軌道與運(yùn)行狀態(tài)完全掌握的前提下,而且所有交會(huì)過程均有地面飛控人員或飛船上航天員的參與。美國航天飛機(jī)、俄羅斯進(jìn)步號(hào)或聯(lián)盟號(hào)飛船與國際空間站的交會(huì)對(duì)接也是類似情況,即所有參數(shù)與運(yùn)行狀態(tài)已知,甚至交會(huì)過程有人參與。
針對(duì)失效衛(wèi)星等非合作目標(biāo)進(jìn)行在軌服務(wù)操作,有利于挽救高價(jià)值衛(wèi)星及航天器,是在軌服務(wù)的智能技術(shù),也是未來發(fā)展的趨勢(shì)之一。針對(duì)非合作目標(biāo)接近的研究主要集中在相對(duì)位置控制[1]與相對(duì)導(dǎo)航的研究[2]等,郝瑞[3]和程博等[4]即使考慮軌道與制導(dǎo)設(shè)計(jì)方面內(nèi)容,也是基于相對(duì)運(yùn)動(dòng)模型,即研究限于主動(dòng)航天器與目標(biāo)近程交會(huì)階段,作用距離一般不超過千米量級(jí)。當(dāng)目標(biāo)與主動(dòng)航天器軌道參數(shù)差異大,采用自主機(jī)動(dòng)模式進(jìn)行遠(yuǎn)程交會(huì),這種模式目前仍然是國際前沿研究中的關(guān)鍵技術(shù)。2016年長征七號(hào)火箭首飛中遠(yuǎn)征一號(hào)甲上面級(jí)在軌采用自主機(jī)動(dòng)模式遠(yuǎn)程接近無控的末級(jí)火箭殘骸,是對(duì)遠(yuǎn)程自主接近的一次成功試驗(yàn),取得了令人滿意的成果。
本文給出上面級(jí)遠(yuǎn)程接近非合作目標(biāo)的軌道設(shè)計(jì)方法,及遠(yuǎn)征一號(hào)甲上面級(jí)的飛行結(jié)果。
1 軌道設(shè)計(jì)中的多目標(biāo)約束
遠(yuǎn)程接近非合作目標(biāo),首先需要通過地面測(cè)控網(wǎng)搜集目標(biāo)定軌,預(yù)測(cè)目標(biāo)軌道參數(shù),將初值上傳至主動(dòng)飛行器(上面級(jí))。初步定軌結(jié)果上傳后,上面級(jí)箭機(jī)自主進(jìn)行軌道推算,然后實(shí)現(xiàn)自主遠(yuǎn)程接近。
上面級(jí)整個(gè)軌道設(shè)計(jì)過程需要關(guān)注的約束條件包括:
1)空間目標(biāo)的定軌計(jì)算:初步估算目標(biāo)運(yùn)行軌道;實(shí)際飛行中結(jié)合地面測(cè)定軌支持,箭機(jī)進(jìn)行在線計(jì)算。
2)滿足測(cè)控條件約束:空間目標(biāo)定軌參數(shù)上傳至主動(dòng)飛行器上面級(jí),一般選擇在上面級(jí)長時(shí)間滑行期間,且地面測(cè)控可覆蓋弧段作為目標(biāo)軌道參數(shù)上傳窗口;對(duì)于長時(shí)間不能覆蓋的區(qū)域,啟用天基測(cè)控,飛行姿態(tài)受相應(yīng)測(cè)控要求約束。
3)異面變軌需求:由于在軌飛行時(shí)間較長,實(shí)施接近前上面級(jí)與空間目標(biāo)(末級(jí)火箭)軌道不同,且存在軌道面差異,需要異面機(jī)動(dòng)。
4)整個(gè)任務(wù)實(shí)施過程需要綜合考慮在軌時(shí)間、推進(jìn)劑耗量等多重約束條件。
5)滿足熱控約束:為了兼顧上面級(jí)的熱設(shè)計(jì),在長時(shí)間滑行中需要關(guān)注飛行姿態(tài)對(duì)飛行熱環(huán)境影響,進(jìn)行合理姿態(tài)設(shè)計(jì)。
6)上面級(jí)具備20次以上多次點(diǎn)火能力,整個(gè)任務(wù)飛行過程小于48h。
上面級(jí)飛行軌道設(shè)計(jì)采用發(fā)射慣性系動(dòng)力學(xué)模型,參見文獻(xiàn)[5],滑行段軌道推算考慮了地球非球形J2項(xiàng)攝動(dòng)與大氣阻力攝動(dòng),參見文獻(xiàn)[5-6]。
2 遠(yuǎn)程接近非合作目標(biāo)的軌道設(shè)計(jì)
2.1 設(shè)計(jì)思路與優(yōu)化指標(biāo)
本小節(jié)以遠(yuǎn)征一號(hào)甲實(shí)際飛行為例,說明進(jìn)行遠(yuǎn)程接近軌道設(shè)計(jì)的主要思路。上面級(jí)在與火箭分離后入軌,首先要完成多有效載荷異軌部署任務(wù),完成3次點(diǎn)火,飛行時(shí)間約20h,然后執(zhí)行在軌非合作目標(biāo)接近任務(wù)。因此接近任務(wù)總時(shí)間應(yīng)小于28h,點(diǎn)火次數(shù)在17次之內(nèi)。
軌道設(shè)計(jì)的首要考慮因素是在多約束前提下推進(jìn)劑消耗最小,因此軌道設(shè)計(jì)的原則是以Hohmann機(jī)動(dòng)為主調(diào)整軌道高度與相位。實(shí)際飛行每次點(diǎn)火過程控制參數(shù)較少,便于制導(dǎo)控制,異面機(jī)動(dòng)與同面機(jī)動(dòng)分次進(jìn)行。接近任務(wù)在多個(gè)有效載荷部署后進(jìn)行,最后分離的有效載荷為用于大氣再入試驗(yàn)的返回艙,返回艙分離時(shí)的軌道為0km×300km(分離高度為170km),即上面級(jí)須從此軌道快速調(diào)整軌道高度回到近地軌道,以免進(jìn)入大氣燒毀無法繼續(xù)飛行,因此首次點(diǎn)火必須使用快速變軌的Lambert變軌方式(以發(fā)動(dòng)機(jī)有限推力實(shí)現(xiàn)),要求近地點(diǎn)高度在130km以上,遠(yuǎn)地點(diǎn)高度約400km,這次點(diǎn)火作為本文進(jìn)行遠(yuǎn)程接近任務(wù)的起點(diǎn),后續(xù)點(diǎn)火除異面機(jī)動(dòng)外均為Hohmann變軌。
考慮到要接近的空間目標(biāo)末級(jí)火箭在任務(wù)完成后會(huì)鈍化,然后完全失控,因此目標(biāo)是非合作狀態(tài),其具體軌道參數(shù)、位置需要地面聯(lián)合測(cè)定,然后將軌道參數(shù)上傳至上面級(jí)作為軌道推算基準(zhǔn)。指令上傳工作在上面級(jí)近圓停泊軌道運(yùn)行時(shí)實(shí)施(此軌道與目標(biāo)軌道在慣性空間有交點(diǎn)),異面機(jī)動(dòng)需要在上傳后進(jìn)行,經(jīng)過設(shè)計(jì)與仿真分析,目標(biāo)軌道參數(shù)上傳窗口三亞站。執(zhí)行接近任務(wù)的最小點(diǎn)火次數(shù)為5次,飛行時(shí)間在22h內(nèi),以推進(jìn)劑耗量最小為優(yōu)化指標(biāo)完成接近任務(wù),理論設(shè)計(jì)要求最小接近距離在10km內(nèi),任務(wù)執(zhí)行過程中考慮測(cè)控、傳感器、導(dǎo)航等多項(xiàng)偏差要求最終接近距離小于200km。
2.2 變軌策略
2.2.1 變軌前停泊軌道的選取
上面級(jí)在遠(yuǎn)程接近非合作目標(biāo)(末級(jí)火箭)驗(yàn)證飛行前,首先完成多星部署任務(wù),已經(jīng)機(jī)動(dòng)多次,因此需要根據(jù)目標(biāo)軌道與當(dāng)前軌道選取接近前的停泊軌道,而且為了異面機(jī)動(dòng)不影響軌道高度,選取圓軌道為宜。
上面級(jí)飛行中選取的目標(biāo)為完成任務(wù)后的末級(jí)火箭,考慮到其初始軌道近似為200km× 400km橢圓軌道,上面級(jí)在進(jìn)行接近前可以選取200km或400km圓軌道作為其初始停泊軌道,為了異面機(jī)動(dòng)更省燃料,而且地基測(cè)控覆蓋時(shí)間更長,飛行任務(wù)中選取了400km近圓軌道。
2.2.2 異面機(jī)動(dòng)
上面級(jí)與目標(biāo)(末級(jí)火箭)同時(shí)入軌,不考慮分離速度影響,初始時(shí)刻兩者軌道面相同,但是上面級(jí)經(jīng)過多星部署,在飛行24小時(shí)后,兩者受到的攝動(dòng)不同,軌道面出現(xiàn)差異,因此需要異面機(jī)動(dòng),消除軌道面偏差。
考慮到異面差異是由攝動(dòng)引起,而低地軌道LEO影響最大的攝動(dòng)因素為地球非球形與大氣阻力攝動(dòng),地球扁率不造成軌道傾角的長期攝動(dòng),而會(huì)引起升交點(diǎn)赤經(jīng)的長期漂移,即軌道進(jìn)動(dòng)[7]。因此實(shí)際設(shè)計(jì)中主要考慮消除升交點(diǎn)赤經(jīng)偏差,軌道傾角基本不變,而且升交點(diǎn)赤經(jīng)的變化量ΔΩ較小(小于1°)。對(duì)于一般情況,軌道面改變?chǔ)牟粌H造成軌道傾角的變化,也會(huì)引起升交點(diǎn)赤經(jīng)變化,設(shè)異面機(jī)動(dòng)前軌道傾角為i1,升交點(diǎn)赤經(jīng)為Ω1,在兩軌道面交點(diǎn),即緯度幅角為u的位置機(jī)動(dòng),機(jī)動(dòng)后軌道傾角和升交點(diǎn)赤經(jīng)分別為i2和Ω2,根據(jù)球面三角形關(guān)系可得:

(1)
對(duì)于本文實(shí)際情況軌道傾角攝動(dòng)較小,升交點(diǎn)赤經(jīng)差異較大,即i1≈i2,且(Ω2-Ω1)為小量,δ為小量,且兩者近似。則根據(jù)式(1)可以推導(dǎo)出cosu為與tan(δ/2)同量級(jí)的小量,則u近似位置在90°或270°附近。即在圓軌道緯度幅角90°或270°附近進(jìn)行垂直軌道面機(jī)動(dòng),改變升交點(diǎn)赤經(jīng),而軌道高度與軌道傾角基本不變。機(jī)動(dòng)產(chǎn)生ΔΩ變化量需要考慮調(diào)相過程上面級(jí)與目標(biāo)的軌道進(jìn)度差異,與兩者半長軸相關(guān),參見文獻(xiàn)[6]。
(2)
式(2)為地球扁率引起升交點(diǎn)赤經(jīng)的變化(以J2為例),其中a為軌道半長軸,i為軌道傾角。
2.2.3 同平面主動(dòng)調(diào)相
進(jìn)行接近機(jī)動(dòng)前,上面級(jí)先完成了多星部署任務(wù),所以上面級(jí)與目標(biāo)在不同軌道上飛行較長時(shí)間,與目標(biāo)相位差異較大,但是上面級(jí)與目標(biāo)軌道高度差異不大,而且目標(biāo)運(yùn)行于橢圓軌道上,因此無法通過長時(shí)間的滑行自然調(diào)相消除相位差,為了在有限燃料、飛行時(shí)間限制下盡快接近,需要通過施加推力進(jìn)行主動(dòng)調(diào)相[8],實(shí)際飛行中需要24h內(nèi)完成整個(gè)接近過程。
理論上以某一圓軌道為初始軌道進(jìn)行主動(dòng)調(diào)相時(shí),當(dāng)前高度可以為近地點(diǎn),加速抬升軌道;也可以是遠(yuǎn)地點(diǎn),減速降低軌道。但是根據(jù)前面停泊軌道的設(shè)計(jì),上面級(jí)在400km高度進(jìn)行機(jī)動(dòng)主動(dòng)調(diào)相,降低軌道高度范圍有限,因此選用加速抬升軌道的變軌策略。調(diào)相軌道運(yùn)行圈數(shù)受到燃料與時(shí)間雙重制約,需要互相權(quán)衡。
綜上,針對(duì)近似為200km×400km橢圓軌道目標(biāo),上面級(jí)部署完其他載荷后以400km近圓軌道為停泊軌道進(jìn)行后續(xù)接近機(jī)動(dòng),首先在緯度幅角為90°或270°位置垂直軌道面點(diǎn)火,消除異面;然后在合適位置加速進(jìn)入調(diào)相軌道;通過N圈主動(dòng)調(diào)相軌道運(yùn)行消除相位差后,再次點(diǎn)火可以減速回到目標(biāo)軌道上,接近空間目標(biāo)。主要的設(shè)計(jì)難點(diǎn)在于異面機(jī)動(dòng)與調(diào)相機(jī)動(dòng)。
2.3 調(diào)相軌道設(shè)計(jì)
采用主動(dòng)調(diào)相,調(diào)相軌道的設(shè)計(jì)原理參見圖1。上面級(jí)處于C1時(shí)可以進(jìn)行調(diào)相機(jī)動(dòng),假設(shè)開始調(diào)相時(shí)刻目標(biāo)的相位為θ0,上面級(jí)需要在調(diào)相軌道運(yùn)行N圈才能滿足相位要求,暫時(shí)不考慮有限推力的機(jī)動(dòng)時(shí)長,采用脈沖理論,根據(jù)主動(dòng)調(diào)相原理可知總調(diào)相時(shí)間Tphase為:
(3)
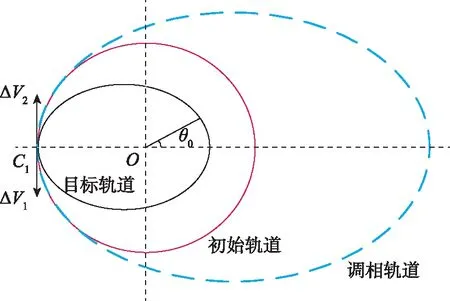
圖1 主動(dòng)調(diào)相軌道設(shè)計(jì)示意圖Fig.1 Orbit design of phase maneuvering
本次任務(wù)使用加速情況,調(diào)相軌道遠(yuǎn)地點(diǎn)高度依據(jù)相位差和燃料、接近任務(wù)時(shí)間等多種約束限制,根據(jù)實(shí)際需求,上面級(jí)在飛行31h20min(慣性空間上面級(jí)軌道與目標(biāo)軌道近似交點(diǎn))進(jìn)行加速機(jī)動(dòng),進(jìn)入調(diào)相軌道,任務(wù)選用的調(diào)相軌道運(yùn)行6圈,根據(jù)初始相位差初步估算出調(diào)相軌道遠(yuǎn)地點(diǎn)高度約為1400km。
2.4 上面級(jí)飛行剖面
長征七號(hào)末級(jí)火箭完成發(fā)射任務(wù)后,只進(jìn)行鈍化,不再進(jìn)行機(jī)動(dòng)動(dòng)作,鈍化對(duì)軌道影響較小,攝動(dòng)因素在軌道推算中考慮,初步軌道設(shè)計(jì)中按照目標(biāo)初始入軌為200km×400km橢圓軌道(目標(biāo)軌道示意見圖2中軌道⑥)進(jìn)行軌道推算,由于攝動(dòng)影響近地點(diǎn)幅角和升交點(diǎn)赤經(jīng)會(huì)有變化。設(shè)計(jì)的多次點(diǎn)火遠(yuǎn)程接近軌道見圖2,上面級(jí)完成多載荷部署任務(wù)(之前共實(shí)施3次點(diǎn)火),分離返回艙后快速調(diào)姿,首先進(jìn)行Lambert機(jī)動(dòng)(第4次變軌)進(jìn)入約140km×400km橢圓軌道(圖2中軌道①);然后在軌道遠(yuǎn)地點(diǎn)進(jìn)行Hohmann變軌(第5次變軌),使軌道圓化,進(jìn)入400km近圓軌道(圖2中軌道②)停泊,等待地面注入目標(biāo)實(shí)際軌道參數(shù)。
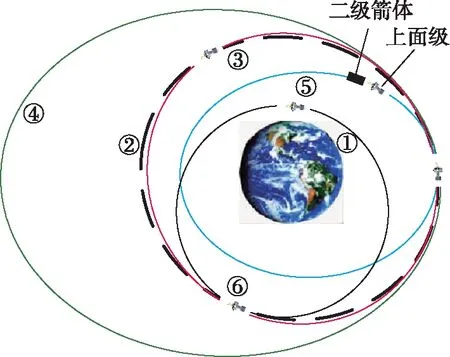
圖2 遠(yuǎn)程定點(diǎn)機(jī)動(dòng)飛行過程示意圖(二級(jí)箭體即長征七號(hào)末級(jí)火箭)Fig.2 Flight route of far range approach
上面級(jí)在停泊軌道運(yùn)行,在國內(nèi)三亞站可測(cè)控窗口進(jìn)行遙控上行,地面測(cè)控系統(tǒng)將非合作目標(biāo)末級(jí)火箭的定軌數(shù)據(jù)上傳至上面級(jí),然后在圓軌道緯度幅角270°進(jìn)行異面變軌(第6次變軌),消除接近后的上面級(jí)與目標(biāo)軌道的升交點(diǎn)赤經(jīng)差,不改變軌道高度與軌道傾角,機(jī)動(dòng)后仍然為軌道高度400km左右(圖2中軌道③)的近圓軌道;然后上面級(jí)在目標(biāo)軌道遠(yuǎn)地點(diǎn)附近進(jìn)行加速進(jìn)入調(diào)相軌道(圖2中軌道④)(第7次變軌),軌道半長軸由上面級(jí)與空間目標(biāo)(二級(jí)箭體)的相位差決定,設(shè)計(jì)方法見2.3節(jié);在經(jīng)過N圈(N值取決于飛行時(shí)間與推進(jìn)劑耗量,在長征七號(hào)首飛試驗(yàn)中N的設(shè)計(jì)值為6)滑行后,上面級(jí)與空間目標(biāo)在目標(biāo)遠(yuǎn)地點(diǎn)附近相遇,上面級(jí)進(jìn)行最后一次機(jī)動(dòng)(第8次變軌),減速進(jìn)入目標(biāo)相近軌道(圖2中軌道⑤),與目標(biāo)接近。
上面級(jí)飛行過程中,變軌段俯仰、偏航姿態(tài)根據(jù)變軌策略計(jì)算,滾動(dòng)角的設(shè)計(jì)滿足天基測(cè)控可見性約束;長時(shí)間滑行段上面級(jí)采用對(duì)地指向姿態(tài),保證熱控條件。
3 理論仿真結(jié)果與飛行驗(yàn)證
3.1 理論彈道計(jì)算仿真結(jié)果
上面級(jí)搭載長征七號(hào)火箭起飛,然后完成多載荷部署,在返回艙分離再入后,上面級(jí)迅速調(diào)姿拉起軌道高度回到近地軌道,然后遠(yuǎn)地點(diǎn)變軌進(jìn)入接近400km近圓軌道停泊,等待目標(biāo)軌道參數(shù)上行。上面級(jí)軌道設(shè)計(jì)過程中,根據(jù)空間目標(biāo)二級(jí)箭體入軌初值推測(cè)出上傳目標(biāo)軌道參數(shù)見表 1。上面級(jí)在接到目標(biāo)參數(shù)前其停泊軌道參數(shù)見表 1,上面級(jí)在經(jīng)過上傳窗口后,依次進(jìn)行異面機(jī)動(dòng)、調(diào)相機(jī)動(dòng),在飛行41.6h后,第8次點(diǎn)火后逐漸與二級(jí)箭體接近,并與目標(biāo)形成近似伴飛關(guān)系,每次機(jī)動(dòng)后軌道參數(shù)見表 1。
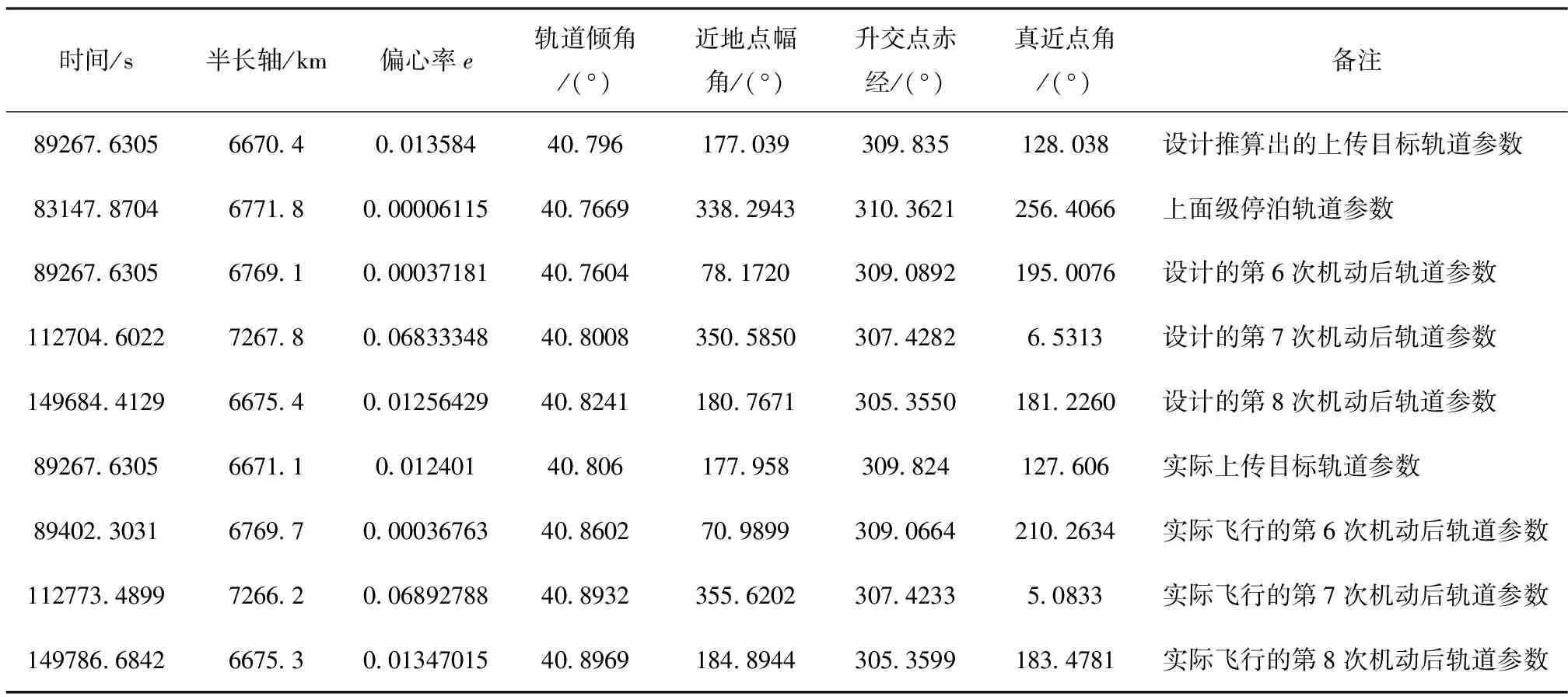
表1 軌道參數(shù)(瞬根)Tab.1 Orbital elements (instantaneous elements)
上面級(jí)經(jīng)過多次變軌,可與目標(biāo)形成伴飛狀態(tài),接近最近距離約8km,保持相對(duì)距離15km范圍內(nèi)大于3000s,參見上面級(jí)與目標(biāo)的接近距離dr隨時(shí)間變化趨勢(shì)圖3。
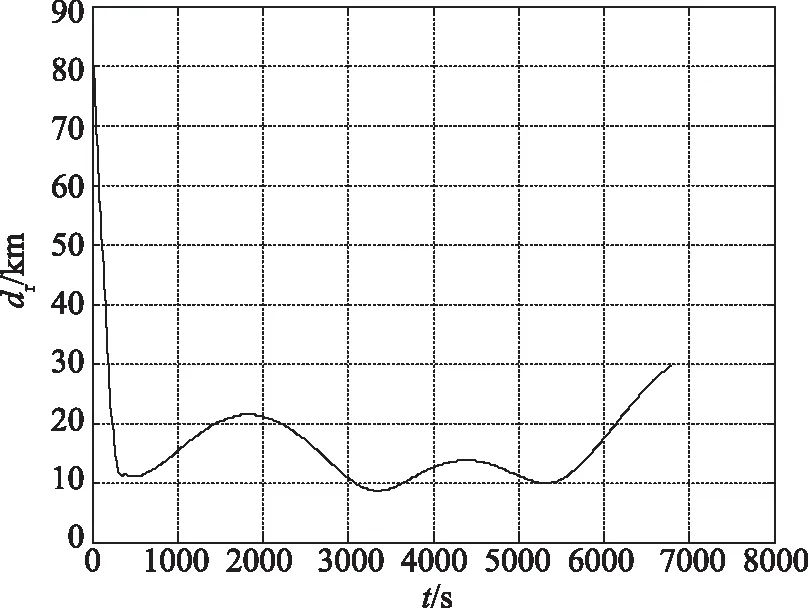
圖3 上面級(jí)與目標(biāo)接近距離仿真結(jié)果Fig.3 Approach distance between the upper stageand the target (simulation result)
3.2 實(shí)際飛行結(jié)果
2016年6月25日,遠(yuǎn)征一號(hào)甲上面級(jí)搭載長征七號(hào)火箭起飛,6月26日,完成多載荷部署,于北京時(shí)間19時(shí)進(jìn)入停泊軌道,在6月26日20時(shí)20分上傳地面測(cè)控網(wǎng)提供的目標(biāo)軌道定軌參數(shù),參數(shù)見表1。上面級(jí)在軌根據(jù)地面上傳的目標(biāo)參數(shù),計(jì)算目標(biāo)實(shí)時(shí)飛行位置,并據(jù)此將第6~8次火點(diǎn)位置與軌道機(jī)動(dòng)參數(shù)進(jìn)行在線調(diào)整(實(shí)際飛行參數(shù)見表 1),于6月27日13時(shí)36分完成第8次點(diǎn)火,與末級(jí)火箭目標(biāo)在遠(yuǎn)地點(diǎn)接近,保持接近伴飛狀態(tài),兩者實(shí)際相對(duì)位置dr隨時(shí)間的變化見圖4。鑒于上面級(jí)不做近程機(jī)動(dòng),不具備避障手段,為了保證不碰撞,在實(shí)際飛行控制過程中特意增加軌道傾角偏置量,避免兩飛行器完全同平面與接近距離不可控情況,從而造成最終接近距離在50km量級(jí)。
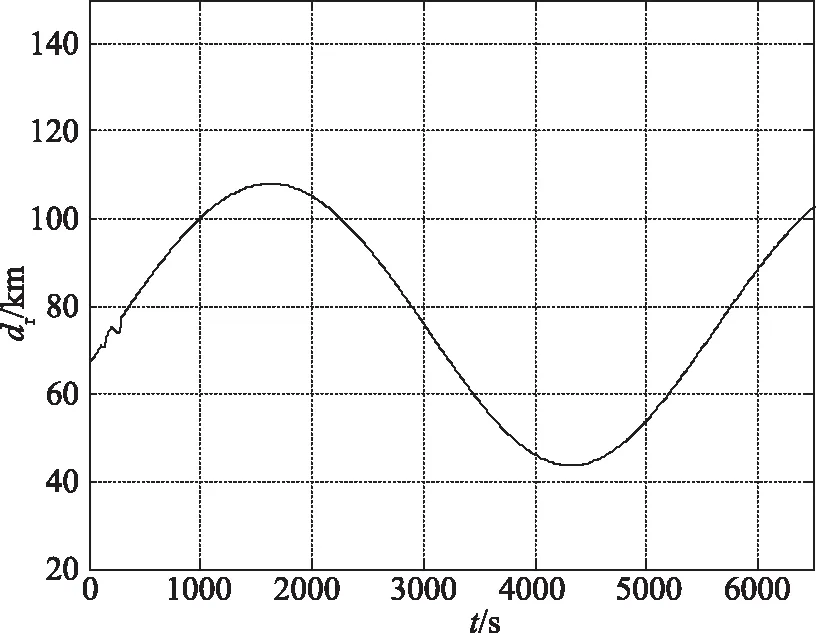
圖4 上面級(jí)與目標(biāo)相對(duì)距離的實(shí)際飛行結(jié)果Fig.4 Approach distance between the upper stage and the target(flight result)
從實(shí)際飛行結(jié)果可以看出,上面級(jí)異面機(jī)動(dòng)升交點(diǎn)赤經(jīng)終值及調(diào)相軌道半長軸與理論設(shè)計(jì)結(jié)果接近,其中升交點(diǎn)赤經(jīng)實(shí)際值與仿真值偏差約0.02°,調(diào)相軌道半長軸實(shí)際值與仿真值偏差約1.6km;上面級(jí)經(jīng)過多次機(jī)動(dòng),完成第8次點(diǎn)火時(shí)與火箭末級(jí)箭體接近距離約67km,之后兩者距離先增大后縮小,呈現(xiàn)周期性變化趨勢(shì),最小相對(duì)距離約44km,最大相對(duì)距離約108km。考慮到實(shí)際飛行發(fā)動(dòng)機(jī)推力偏差和控制偏差,上面級(jí)的飛行過程和結(jié)果與預(yù)期完全一致,驗(yàn)證飛行圓滿成功,也佐證了本文設(shè)計(jì)方法的有效性。
4 結(jié)論
本文針對(duì)空間非合作目標(biāo)進(jìn)行遠(yuǎn)程接近的機(jī)動(dòng)軌道設(shè)計(jì),提出相應(yīng)設(shè)計(jì)方案與方法,得出如下結(jié)論:
1) 遠(yuǎn)程接近非合作目標(biāo)軌道參數(shù)需要測(cè)控系統(tǒng)支持,上傳相應(yīng)軌道參數(shù)需選擇合適遙控窗口;
2) 一般工程應(yīng)用中主要考慮因素為推進(jìn)劑耗量較省,針對(duì)非合作目標(biāo)的機(jī)動(dòng)需要異面機(jī)動(dòng)、調(diào)相等多次點(diǎn)火實(shí)現(xiàn);
3) 通過目標(biāo)軌道參數(shù)上行注入,上面級(jí)可以通過遠(yuǎn)程軌道機(jī)動(dòng),在2d內(nèi)接近非合作空間目標(biāo),接近距離在幾十km量級(jí);
4) 如果進(jìn)行在軌服務(wù)等更近距離的空間操作,需要繼續(xù)進(jìn)行近程制導(dǎo)、交會(huì)對(duì)接等設(shè)計(jì)工作。
[1] 徐李佳, 胡勇. 非合作機(jī)動(dòng)目標(biāo)交會(huì)的相對(duì)位置控制[J]. 空間控制技術(shù)與應(yīng)用, 2015, 41(6): 13-18.
[2] 楊東春, 趙春慧, 顧冬晴. 基于激光測(cè)距和慣導(dǎo)的非合作目標(biāo)遠(yuǎn)程交會(huì)相對(duì)導(dǎo)航算法研究[J]. 上海航天,2016, 33(4): 75-80.
[3] 郝瑞. 空間機(jī)器人在軌接近運(yùn)動(dòng)規(guī)劃與制導(dǎo)控制研究[D].長沙:國防科學(xué)技術(shù)大學(xué), 2014.
[4] 程博, 荊武興, 陳偉躍. 遠(yuǎn)程自主交會(huì)改進(jìn)制導(dǎo)算法 [J]. 宇航學(xué)報(bào), 2008,29 (6): 1804-1808.
[5] 賈沛然, 陳克俊, 何力. 遠(yuǎn)程火箭彈道學(xué)[M].長沙: 國防科技大學(xué)出版社, 2009.
[6] 肖亞倫. 航天器飛行動(dòng)力學(xué)原理[M]. 北京: 中國宇航出版社, 1995.
[7] 劉暾, 趙鈞. 空間飛行器動(dòng)力學(xué)[M]. 哈爾濱:哈爾濱工業(yè)大學(xué)出版社, 2003.
[8] 周文雅, 劉恒, 李順利,等. 基于空間交會(huì)的天基反衛(wèi)作戰(zhàn)方案[J]. 上海航天, 2009,26(3):12-17.
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04