基于目標識別模塊的新型機械臂結構
2018-03-09 08:23:50翁江瑋熊小青陳晟鄭浩萬修其包嘉宇
科技創新與應用 2018年7期
翁江瑋+熊小青+陳晟+鄭浩+萬修其+包嘉宇
摘 要:為加強機械臂在工作空間上的整體可操作性,優化機械臂兼容目標識別模塊的整體機械機構,設計了基于目標識別模塊的新型機械臂結構。該機械結構在原有的五自由度機械臂的基礎上,提出了目標識別模塊結構的優化辦法。為避免機械臂與目標識別模塊的互相干擾,提高工作效率,采用具有創新型的機械結構與目標識別算法,可以有效地提高機械臂的可操作性。
關鍵詞:機械臂;結構優化;自由度;目標識別
中圖分類號:TP241 文獻標志碼:A 文章編號:2095-2945(2018)07-0112-02
Abstract: In order to enhance the overall maneuverability of the manipulator in the workspace and optimize the integral mechanism of the robot arm compatible with the target recognition module, a new structure of the manipulator based on the target recognition module is designed. On the basis of the original five degree of freedom mechanical arm, the optimization method of target recognition module structure is put forward. In order to avoid the interference between the manipulator and the target recognition module and improve the working efficiency, the maneuverability of the manipulator can be effectively improved by adopting the innovative mechanical structure and target recognition algorithm.
Keywords: manipulator; structural optimization; degree of freedom; target recognition
對基于目標識別模塊的機械臂結構來說,機械臂的目標識別模塊是一個非常重要的組成部分,機械臂在獲得正確的目標信息的情況下,才能控制機械臂完成預定的工作任務。傳統的基于目標識別模塊的機械臂結構,一般采用固定目標識別模塊的設計思路,不利于全方位的機械臂工作。本次計劃采用基于opencv的視覺處理庫在pc端上完成圖像處理,通過調用輕量型圖像處理函數和合理配置函數的架構達到簡單高效的目標識別定位。
1 機械臂結構設計
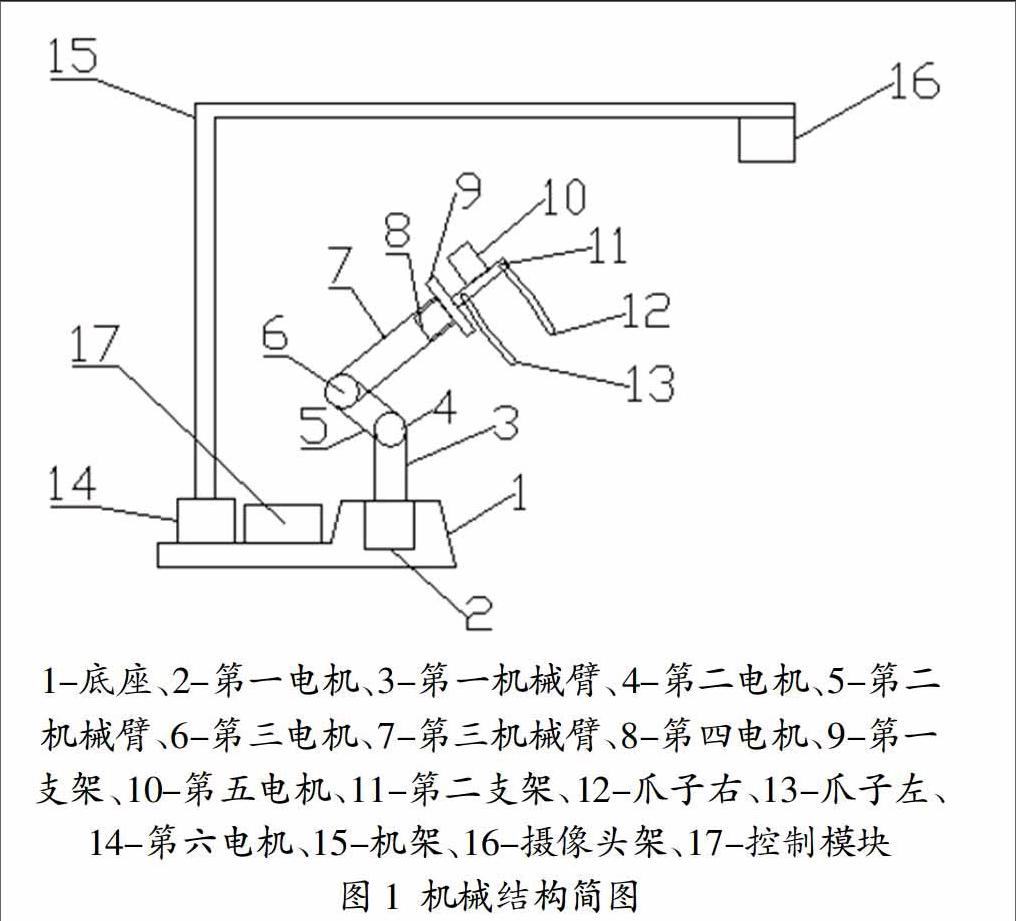
基于目標識別模塊的新型機械臂結構(見圖1)包括底座、第一電機、第一機械臂、第二電機、第二機械臂、第三電機、第三機械臂、第四電機、第一支架、第五電機、第二支架、爪子右、爪子左、第六電機、機架、攝像頭架、控制模塊;底座用于固定第一電機與第五電機,第一電機的轉軸與第一機械臂的一端固定連接;第二電機的轉軸與第二機械臂的一端固定連接;第三電機的轉軸與第三機械臂的一端固定連接;第四電機的轉軸與第一支架的一側固定連接;第二支架與第一支架的一側固定連接,且用于固定第五電機;爪子右、爪子左與第五電機的轉軸連接;第六電機的轉軸與機架的一端固定連接,機架的一端與攝像頭架固定連接。
機械臂在工作過程中,控制模塊供電啟動,驅動第六電機的轉軸轉動帶動機架與攝像頭架的運動,目標識別模塊捕捉工作范圍內的物料狀態反饋給控制模塊,經過PC端圖像數據處理后,控制模塊驅動第一電機、第二電機、第三電機、第四電機、第五電機的轉軸轉動,從而帶動第一機械臂、第三機械臂、爪子右、爪子左的運動,實現物料抓取,完成一個周期的運動,此時再重復上述過程。
新型機械臂的結構通過采用了五自由度的機械臂結構,使得機械臂的工作空間更大,同時將目標識別模塊外置于機械臂結構外,保證了穩定的工作狀態,在后期維護過程當中方便拆卸,且不會造成危險。有利于形成一定規模的模塊化設計與生產能力。
1-底座、2-第一電機、3-第一機械臂、4-第二電機、5-第二機械臂、6-第三電機、7-第三機械臂、8-第四電機、9-第一支架、10-第五電機、11-第二支架、12-爪子右、13-爪子左、14-第六電機、15-機架、16-攝像頭架、17-控制模塊
2 n處理方式
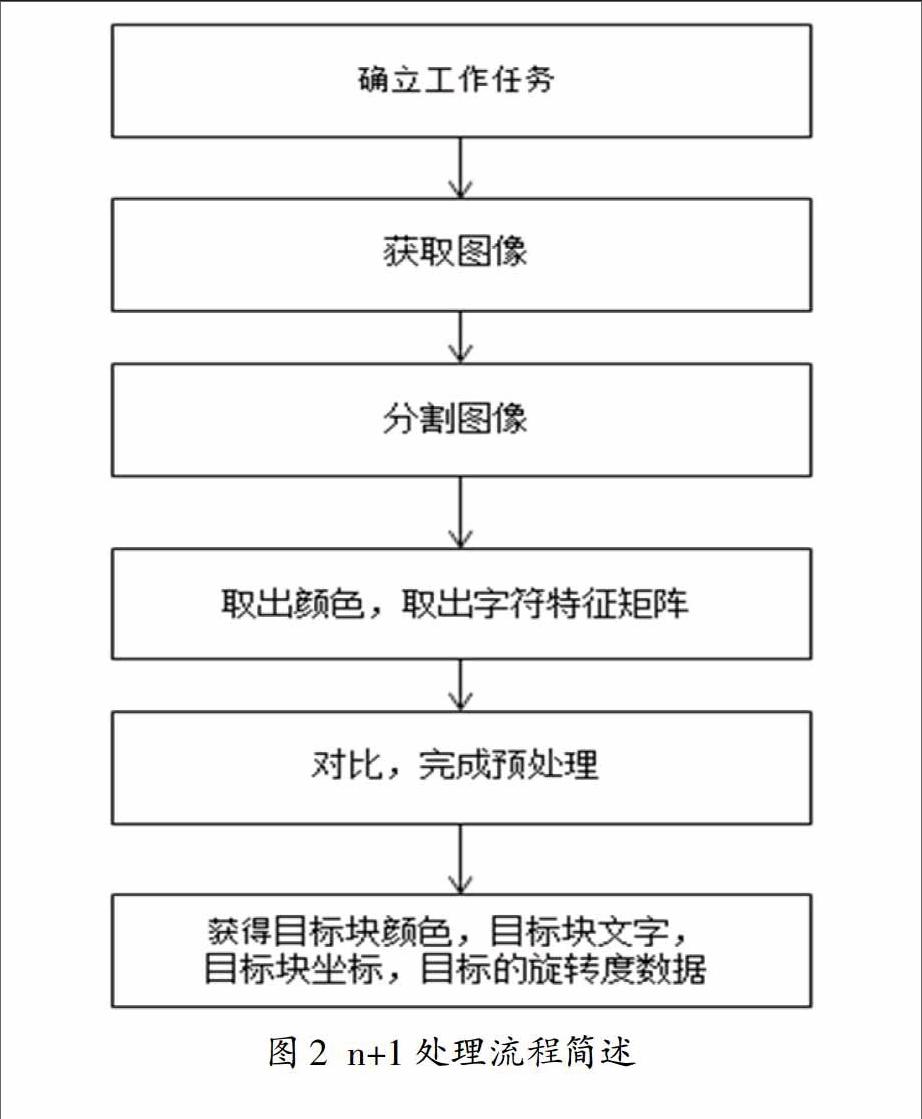
(1)不同的情況下,系統需要選擇不同的處理目標,針對不同的處理目標需要選取不同處理方案,本研究的處理目標是獲得不規則擺放的物塊上方的文字符號和物料顏色,和確定目標塊的空間坐標。
(2)處理圖像來自于高清無畸變彩色攝像頭,從成本上考慮定點攝像頭俯瞰比跟隨機械臂一同運動的攝像頭成本更為低廉,且更利于后期的維護。
(3)在目標獲取上我們采用分割法,選取面積為2倍物塊頂面的矩形為單元,從中心向四周展開網格,以此分割圖像,由此產生2大類子圖,無邊緣切割圖像與有邊緣切割圖像。在分割后對于圖像進行背景色垂直和水平投影以區分以上2類子圖(背景色是已知的并且和物料顏色有明顯區分,因此投影中出現物塊部分會有明顯的變化,根據相臨的子圖可以判定出該圖是否擁有部分物塊,以擁有50%的物塊定義為有25%以下定義為無),對于切割到邊緣的圖像以切割部分向周圍擴張調整子圖最終調整為完整的盡可能只包括一個物塊的子圖,并且對每個子圖進行編號和坐標確認。隨后對于每一個有內容的子圖用背景法取出內部物塊,并獲取邊緣,考慮到可能會有較為相近的物塊,在這一步操作中分割,本輪操作結束后獲得無背景的待處理物塊。endprint
(4)對于任一待處理物塊由于已經濾除背景,此時可以直接取顏色直方圖選取目標顏色篩選出非任務目標的部分減少工作量。隨后使用透視法矯正優化待處理圖像,同時進行旋轉,本段結束后獲得近似正方形的待處理物塊,(此處不必考慮差值,為方便處理物塊上文字采用分割取樣,是采用了降低像素的圖像校正的方式),根據待處理物塊的模型,用背景法取出上面的文字字符,并填入16*16的矩陣。
(5)用距離法將特征矩陣和數據庫內的特征矩陣作對比,獲得處理結果。
3 結束語
本文給出了基于目標識別模塊的新型機械臂結構,在靈活性的基礎上提出了一種新的目標識別抓取辦法的概念;基于目標識別模塊的n處理算法,使優化后的機械臂靈活性達到最優,優化結果可以得出:
(1)機械結構在原有的五自由度機械臂的基礎上,為
避免機械臂與目標識別模塊的互相干擾,將目標識別模塊外設,采用目標識別模塊的n處理算法,優化了目標識別模塊結構,可以有效地提高機械臂的可操作性。
(2)不同的情況下,系統可以需要選擇不同的處理目標,針對不同的處理目標需要選取不同處理方案,采用本研究裝置,能夠實現全方位的機械臂工作機能。
(3)機械臂結構采用模塊化的生產方式,有利于后期的維護,降低算法的開發難度,優化了工業機器人在碼垛、裝配等領域的技術手段。
參考文獻:
[1]賈世元,賈英宏,徐世杰.基于姿態可操作度的機械臂尺寸優化方法[J].北京航空航天大學學報,2015,41(9):1692-1699.
[2]閆繼宏,郭鑫,劉玉斌,等.一種模塊化機械臂的設計與運動學分析[J].哈爾濱工業大學學報,2015,47(1):21-25.
[3]張國亮,王捷,劉宏.大范圍視覺伺服方法在空間機器人上的應用[J].西安交通大學學報,2009,43(1):86-89.
[4]高志發,付志忠,尹鵬.窨井清掏機械臂機構實體建模設計[J].科技創新與應用,2017(11):18.
[5]陳楊,王莉,矯立強,等.基于SimMechanics的機械臂工作空間求解[J].科技創新與應用,2016(24):53.
[6]王亞騰.視覺控制的機械臂在家庭自動化中的應用[J].科技創新與應用,2015(17):14-15.endprint
猜你喜歡
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
科技視界(2016年18期)2016-11-03 20:33:59
中國科技博覽(2016年18期)2016-10-19 10:38:31
中國市場(2016年33期)2016-10-18 14:10:51
中國市場(2016年33期)2016-10-18 14:03:59
商業經濟研究(2016年14期)2016-09-14 08:58:20
中國科技博覽(2016年9期)2016-04-25 10:13:28