微型車線控轉向系統的研究
2018-03-12 06:09:17
福建質量管理 2018年4期
關鍵詞:系統
(北京信息科技大學 北京 100192)
一、引言
汽車工業發展至今的百余年里,控制技術在不斷的進步[1],在一定程度上反映了汽車的工業水平[2]。自動駕駛汽車開始出現在人們的視野中。而在自動駕駛車輛轉向過程中,方向盤依然隨著轉向柱在旋轉。在高級駕駛輔助系統(ADAS)和自動駕駛技術飛速發展的今天,若要讓轉向系統集成到整車控制、聽從中央處理器的指揮,則勢必要拋棄這種傳統的機械連接,加入智能的處理器和執行器以精準地、安全地控制轉向的力度和角度。
本文在系統仿真的基礎上,完成了微型車線控轉向系統的硬件改造和控制策略設計,利用PID算法控制轉向電機電流,并對微型車實車試驗結果進行了分析。
二、線控轉向系統結構與建模
(一)線控轉向系統結構
線控轉向系統是由轉向盤總成、轉向執行總成、轉向控制器以及容錯系統、汽車總線網絡和車載電源等輔助系統組成[3],圖1為線控轉向原理示意圖。線控轉向系統摒棄了轉向柱萬向節等部件,改為電信號總線技術傳輸控制信息。駕駛員轉動方向盤,安裝在方向盤部位的轉角傳感器將轉角信息輸入到轉向控制器中,控制器結合當前車速、橫擺角速度、質心側偏角等車輛狀態信息計算出適合當前汽車運行狀態的轉向傳動比作為理想轉向傳動比,控制器按照設計好的控制策略計算出轉向執行電機需要的電流,轉向執行電機連接轉向器,經過轉向執行機構使前輪轉向,達到駕駛員希望轉過的角度,前輪轉角傳感器將當前轉角信息反饋給控制器,形成閉環控制。線控轉向系統原理圖如圖1。
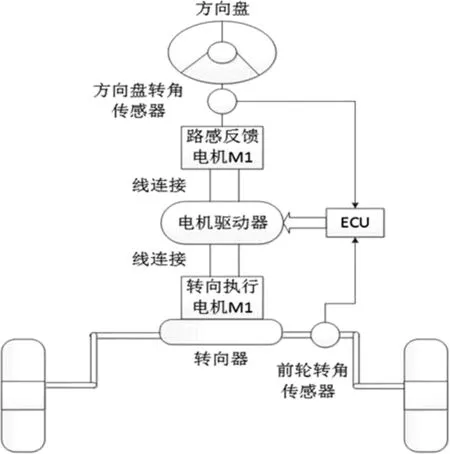
圖1 線控轉向原理圖
(二)線控轉向系統建模
方向盤系統模型:
(1)
(2)
(3)
轉向執行電機模型:
(4)
式中Js為轉向盤子系統等效到轉向柱的轉動慣量;θh為轉向盤轉角,Cs為轉向盤子系統等效到轉向柱的阻尼系數;Th為轉向盤轉矩;Tsm為路感電機轉矩;Gsm為路感電機減速器傳動比;Jf為前輪子系統等效到前輪轉向銷的轉動慣量;Cf為前輪子系統等效到前輪轉向銷的阻尼系數;Tfm為前輪轉向電機轉矩;Ta為前輪的回正力矩;θf前輪轉角;Jfm為前輪轉向電機轉動慣量;θfm為前輪轉向電機轉角;Cfm為電機軸阻尼系數;Tfm為前輪轉向電機轉矩;Gs為齒輪齒條轉向器傳動比;Gfm前輪轉向電機減速器傳動比;d為輪胎氣壓拖距與輪胎機械拖距之和,視為一定值;v為側向速度;u為車輛汽車前進速度;k1為前輪側偏剛度;ke電動勢常數。
根據上述微分方程建立Simulink模型,結合微型試驗車的整車參數,建立CarSim整車模型。控制框圖如圖2所示。

圖2 控制框圖
三、理想傳動比的設計
在傳統的機械轉向系統中,轉向系統的總傳動比為:
(6)
傳動比i由機械系統決定。傳動比是操縱性中的轉向特性和轉向盤力特性,以及穩定性方面的直線行駛路徑保持性的影響因素[7]。對于微型試驗車原轉向系統而言,i為定值。試驗車的穩態橫擺角速度增益[7]如下所示:
(7)

圖3 橫擺速度增益與車速關系
通過仿真如圖可以看出,汽車的穩態橫擺角速度增益會隨著車速的增大呈現先增大后減小的趨勢,在對試驗車的設計之中,因為試驗車的最高車速小于60km/h,故橫擺角速度增益會隨著車速的增加而增大。這就要求試驗車在低速時具有較小的傳動比,中高速時需要較大的傳動比。從而減小駕駛員的操縱負擔,使車輛橫擺角速度系統增益穩定為一常數,提高行駛安全性。
本文基于期望的橫擺角速度增益為一定值,設計了微型試驗車的傳動比,如式(8)(9)。
(8)
(9)
微型試驗車的最高時速為50km/h,為方便研究,以時速10km/h為界限,劃定了試驗車的低速區和高速區。低速狀態下,試驗車傳動比為一定值,前輪最大轉向角度為30°,令i=6,方向盤轉動角度為±180°,方向盤由左極限位置到右極限位置打滿一圈即可實現前輪由左極限角度轉到右極限角度,保證輕便性的同時,大大提高了轉向靈活性,可方便駕駛員停車移位;高速狀態下為可變傳動比,即式(10)。

(10)
四、線控轉向系統控制策略的設計
線控轉向系統雖然實現了傳動比的自由設置,但是要使前轉向輪按照轉向盤轉角和可變傳動比決定的期望前輪轉角進行準確的轉向,需要對前輪電機進行適當的位置控制,進而保證前輪轉動角度的精確性。安裝在方向盤下方的轉角傳感器,輸出的信息為方向盤目標轉角,把目標轉角和角度傳感器輸出的實際轉角的差值作為線控轉向系統控制器的輸入,控制器結合車輛當前的車速和其他參數調整電機的電流和占空比,來控制轉向執行電機,從而達到駕駛員希望轉動的角度。
在過程控制中,按偏差的比例、積分和微分進行控制的PID控制器是應用最為廣泛的一種自動控制器[7]。針對本線控轉向系統,采用了應用普遍的PID算法。經過在線調整,系統響應效果較好,本設計確定KP、KI、KD參數分別為12、0.005、0.06。
五、實驗結果分析
將設計好的傳動比和PID控制算法用C語言編寫成控制程序,通過Keil軟件將程序寫入STM32F103單片機中,用12V鉛酸蓄電池轉角傳感器、控制器、轉向電機和實驗設備供電供電,控制器對應引腳連接電機驅動器,電機驅動器連接轉向執行電機和路感電機。用Racelogic公司的V-BOX3來檢測車輛的速度和橫擺角速度等信息。用RMS公司的測力方向盤、DEWE數據采集儀采集方向盤轉角和轉矩信息。在混凝土路面,車速保持20km/h,在1s時間內,通過DEWE實時顯示系統,方向盤轉過20°,進行試驗[8][9]。實驗結果如圖4所示。

圖4 橫擺角速度隨時間變化曲線

圖5 方向盤角階躍輸入

圖6 方向盤轉矩與時間關系
經過時速20/km,30km/h,40km/h情況下的方向盤角階躍輸入試驗,可以看出試驗車的橫擺角速度穩定在合理范圍之內,能夠快速響應轉向需求,在中高速時,系統穩定時間較低速時更快。經過計算,橫擺角速度增益穩定在0.4左右。同時,轉向盤輸入轉矩大小明顯降低,提高了轉向輕便性,減小了駕駛員操作負擔。
六、結論
本文運用Matlab/Simulink與CarSim軟件對線控轉向系統進行了聯合仿真,針對微型車原有機械轉向系統進行了改造,設計了轉向控制策略,并進行了試驗。試驗結果表明,改造后的微型車轉向系統,響應快速,操縱穩定性提高,轉向輕便性更好,同時為整車線控化平臺的搭建提供了較好的工程意義。
[1]周聰,肖建.汽車線控轉向系統的研究現狀與發展[J].控制工程,2012,(5):827-831.
[2]王祥.汽車線控轉向系統雙向控制及變傳動比特性研究[D].吉林大學,2013.
[3]倪常斌.汽車線控轉向系統建模與控制策略研究[D].東北大學.2011.
[4]余志生.汽車理論[M].北京:機械工業出版社 2000
[5]Christopher D.Gadda,Shad M.Laws and J.Chritian Gerdes.Generating Diagnostic Residuals for Steer-by-Wire Vehicles[J].IEEE Transactions on Control Systems Technology,2007,15(3):529-540.
[6]Andrew Heathershaw.Optimizing Variable Ratio Steering for Improved On-Centre Sensitivityand Cornering Control.SAE Paper 2000-01-0821,2000.
[7]張靜.MATLAB 在控制系統中的應用[M].合肥:中國科學技術大學出版社,2001
[8]王長青.乘用車中心區操縱穩定性客觀評價指標體系研究[D].吉林大學,2012.
[9]GB 6323.2—94.汽車操縱穩定性試驗方法——轉向瞬態響應試驗(轉向盤轉角階躍輸入).[S].天津:全國汽車技術標準化委員會,1994.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
