基于組合函數(shù)的腳踝康復(fù)機(jī)器人軌跡規(guī)劃*
2018-03-13 08:30:36廖志煒盧宗興姚立綱
機(jī)電工程 2018年3期
關(guān)鍵詞:康復(fù)
廖志煒,張 俊,盧宗興,姚立綱
(福州大學(xué) 機(jī)械工程及自動化學(xué)院,福建 福州 350116)
0 引 言
作為人體中負(fù)重最大的關(guān)節(jié),踝關(guān)節(jié)對人們的日常生活具有重要影響[1]。腳踝康復(fù)訓(xùn)練是指患者借助輔助器材的幫助,在合理的工作空間內(nèi)完成特定運(yùn)動,進(jìn)而促進(jìn)受損部位的修復(fù)。為滿足腳踝康復(fù)的需要,學(xué)術(shù)界近年來提出了多種腳踝康復(fù)裝置。例如,Giorne等[2]研制了一種可遠(yuǎn)程控制、帶有虛擬現(xiàn)實并能進(jìn)行力反饋的踝關(guān)節(jié)康復(fù)機(jī)器人系統(tǒng)。DAI等[3-4]研制了具有3-SPS/SP和3-SPS/S拓?fù)錁?gòu)型的少自由度踝關(guān)節(jié)康復(fù)機(jī)器人,可實現(xiàn)跖屈/背屈、內(nèi)翻/外翻運(yùn)動。Takemura等[5]研制了一種基于Stewart結(jié)構(gòu)的可穿戴式踝足康復(fù)訓(xùn)練機(jī)器人,其可通過調(diào)節(jié)6個氣缸的壓力來控制患者踝關(guān)節(jié)的運(yùn)動。Xie等人[6]開發(fā)了一種通過控制氣動肌肉制動器(PMA)來實現(xiàn)康復(fù)運(yùn)動的踝關(guān)節(jié)康復(fù)機(jī)器人。Stuart等[7]提出了一種踝關(guān)節(jié)矯形康復(fù)器串聯(lián)機(jī)構(gòu),可實現(xiàn)踝關(guān)節(jié)的背屈/跖屈運(yùn)動和旋前/旋后運(yùn)動。Yoon等[8]提出了一種可重構(gòu)的踝關(guān)節(jié)康復(fù)機(jī)器人,可滿足不同運(yùn)動特性的需求。劉穎超[9]提出了一種氣動驅(qū)動的6自由度并聯(lián)踝關(guān)節(jié)康復(fù)機(jī)器人,并對該機(jī)器人的運(yùn)動學(xué)、動力學(xué)以及不同康復(fù)階段的康復(fù)策略進(jìn)行了研究。曾達(dá)幸等[10]提出了一種新型并聯(lián)式解耦踝關(guān)節(jié)康復(fù)機(jī)構(gòu),并運(yùn)用旋量理論對該機(jī)構(gòu)進(jìn)行了運(yùn)動學(xué)及相關(guān)性能的分析。
對于康復(fù)機(jī)器人而言,其軌跡規(guī)劃至關(guān)重要。規(guī)劃合理的軌跡,可使康復(fù)裝置具有較好的運(yùn)動平穩(wěn)性和較小的啟停沖擊,從而避免對患者造成二次傷害。學(xué)術(shù)界圍繞機(jī)器人的軌跡規(guī)劃,做了大量研究。其中,擺線加速度規(guī)律由正弦函數(shù)和一次項組成,在啟、停階段具有較好的平穩(wěn)性,但其最大加速度值偏大,致使機(jī)構(gòu)運(yùn)動過程中的動量較大[11-12]。樣條函數(shù)形式的加速度規(guī)律可保證機(jī)構(gòu)運(yùn)動的平穩(wěn)性,可避免在啟停階段的抖動。常用的樣條函數(shù)包括3次樣條曲線、4次樣條曲線、B樣條曲線等[13-16]。另外,為避免單一函數(shù)的缺點,已有研究者推出了一系列組合函數(shù)的驅(qū)動模式,田西勇等[17]將兩種不同頻率的正弦函數(shù)組合,提出了一種加速度為組合正弦函數(shù)的軌跡規(guī)劃方法。Ma等[18]基于H20仿人機(jī)器人手臂,提出了一種由不同頻率的擺線和余弦函數(shù)組成的軌跡規(guī)劃方法。盧君宜等[19]提出了一種加速度為組合正弦函數(shù)的軌跡規(guī)劃方法應(yīng)用于農(nóng)業(yè)采摘機(jī)器人,并與簡單的擺線函數(shù)、樣條函數(shù)進(jìn)行對比。徐達(dá)等[20]提出將三次多項式與五次多項式進(jìn)行組合應(yīng)用于彈藥裝填機(jī)器人。綜上所述,近年來組合函數(shù)軌跡規(guī)劃方法的研究為解決單一函數(shù)存在的缺點提供了參考。但現(xiàn)有研究大多應(yīng)用于一些工業(yè)用途的串聯(lián)機(jī)器人,對于康復(fù)領(lǐng)域,特別是一些以并聯(lián)機(jī)構(gòu)為基礎(chǔ)的康復(fù)機(jī)器人的應(yīng)用相對較少,實際上,康復(fù)機(jī)器人的軌跡需要精心規(guī)劃,合理的規(guī)劃軌跡可以減少裝置對患者的沖擊,避免二次損傷,對于患者的康復(fù)極為重要。
有鑒于此,本文以一種混聯(lián)式腳踝康復(fù)機(jī)構(gòu)為對象,提出一種采用擺線函數(shù)和矩形函數(shù)相組合的康復(fù)軌跡。
1 機(jī)構(gòu)描述與運(yùn)動學(xué)分析
1.1 機(jī)構(gòu)描述
課題組前期研制的混聯(lián)式腳踝康復(fù)機(jī)器人如圖1所示。

圖1 混聯(lián)式腳踝康復(fù)機(jī)器人1—連接桿;2—搖桿;3—動平臺;4—踏板;5—推桿;6—支撐桿;7—齒條;8—齒輪;9—旋轉(zhuǎn)平臺;10—步進(jìn)電機(jī);11—基臺
由圖1可知,該混聯(lián)式腳踝康復(fù)機(jī)器人由連接桿(1)、搖桿(2)、動平臺(3)、踏板(4)、推桿(5,5′,5″,5?)、支撐桿(6)、齒條(7)、齒輪(8)、旋轉(zhuǎn)平臺(9)、步進(jìn)電機(jī)(10)以及基臺(11)組成。其中,患者足底與機(jī)構(gòu)踏板接觸;推桿(5?)、齒條、齒輪、轉(zhuǎn)動平臺、支撐桿、搖桿、連接桿以及動平臺組成該機(jī)構(gòu)的串聯(lián)部分;通過推桿(5?)的運(yùn)動、齒條齒輪傳動,帶動轉(zhuǎn)動平臺繞Z軸旋轉(zhuǎn),實現(xiàn)腳踝的外展/內(nèi)收運(yùn)動。基座、3個推桿(5,5′,5″)、動平臺、支撐桿、搖桿以及連接桿組成該機(jī)構(gòu)的并聯(lián)部分;通過3個推桿(5,5′,5″)的上下運(yùn)動帶動動平臺繞X軸、Y軸旋轉(zhuǎn),實現(xiàn)腳踝的內(nèi)翻/外翻運(yùn)動和跖屈/背屈運(yùn)動。
考慮到腳踝康復(fù)運(yùn)動主要以跖屈/背屈、內(nèi)翻/外翻運(yùn)動為主,且該混聯(lián)式腳踝康復(fù)機(jī)器人的串聯(lián)部分較為簡單,下文僅以該機(jī)器人的并聯(lián)部分為對象,開展并聯(lián)部分的運(yùn)動學(xué)及軌跡規(guī)劃研究。
1.2 運(yùn)動學(xué)逆解
為方便建模和表述,下文將3個推桿(5,5′,5″)分別用字母(A、B、C)來表示。并聯(lián)機(jī)構(gòu)的運(yùn)動學(xué)逆解問題,就是已知動平臺的位姿,求出推桿A、B、C的位移P1、P2、P3。
通過對并聯(lián)部分的結(jié)構(gòu)分析,可給出該部分的機(jī)構(gòu)運(yùn)動簡圖如圖2所示。

圖2 并聯(lián)機(jī)構(gòu)運(yùn)動簡圖S,T—基臺和動平臺的中心點,兩者間的距離設(shè)為h;l1,l2,l3—各推桿在基臺和動平臺間的長度
本研究在基臺中心點S處建立固定坐標(biāo)XYZ。
由圖2可知,各推桿與動/基平臺間構(gòu)成封閉的幾何回路。如推桿A與動/基平臺構(gòu)成的幾何封閉支鏈1為(S-A1-A2-T);推桿B與動/基平臺構(gòu)成的幾何封閉支鏈2為(S-B1-B2-T)。推桿C與動/基平臺構(gòu)成的幾何封閉支鏈3為(S-C1-C2-T)。根據(jù)各支鏈幾何關(guān)系,本文以支鏈1作為研究對象,來建立并聯(lián)部分的運(yùn)動學(xué)逆解模型。
由于該并聯(lián)部分只實現(xiàn)腳踝繞X軸轉(zhuǎn)動的內(nèi)翻/外翻運(yùn)動和繞Y軸轉(zhuǎn)動的跖屈/背屈運(yùn)動,需限制其繞Z軸的轉(zhuǎn)動,即繞Z軸的轉(zhuǎn)動角度θ3為0。假定機(jī)構(gòu)動平臺依次繞Z、Y、X軸旋轉(zhuǎn)完成運(yùn)動,即:
R=Rot(X,θ1)Rot(Y,θ2)Rot(Z,θ3)
(1)
展開得:
(2)
以支鏈1為研究對象,可以得到:
(3)


另有:
(4)
(5)
上式展開后并求解可得:
(6)
同理可得推桿B、C的位移與末端動平臺位姿的關(guān)系式。最終可給出并聯(lián)部分運(yùn)動學(xué)逆解的通式如下:
(7)

2 基于組合函數(shù)的軌跡規(guī)劃
為了保證機(jī)構(gòu)運(yùn)動的平穩(wěn)性,啟停階段不能有速度、加速度的沖擊,且運(yùn)動過程中位移、速度、加速度也應(yīng)緩慢變化。與此同時,機(jī)構(gòu)運(yùn)動的最大加速度、最大速度、以及運(yùn)動過程中的沖擊都要盡可能地小。這樣,才能保證機(jī)構(gòu)運(yùn)動過程中的動量不會過大,振動不會過高。為此,本文采用加速度為擺線函數(shù)和矩形函數(shù)相組合的運(yùn)動規(guī)律。在此基礎(chǔ)上,進(jìn)一步研究組合函數(shù)不同的分段模式對系統(tǒng)位移、速度、加速度、沖擊的影響規(guī)律。
本研究設(shè)定混聯(lián)式腳踝康復(fù)機(jī)器人的啟動和停止位姿時動平臺的運(yùn)動角度分別為θb和θe,運(yùn)動周期為T。根據(jù)上述條件可知:
θ(0)=θb,θ′(0)=0,θ″(0)=0
θ(T)=θe,θ′(T)=0,θ″(T)=0
(8)
2.1 基于擺線函數(shù)的軌跡規(guī)劃


(9)
故可假設(shè)加速度函數(shù)的表達(dá)形式如下:
(10)
根據(jù)分段函數(shù)中連續(xù)性的要求,可以依次得到速度函數(shù)、位移函數(shù)、沖擊函數(shù)如下:
(11)
(12)
(13)
代入邊界條件,可得K1=π/18。
2.2 基于組合函數(shù)的軌跡規(guī)劃
矩形函數(shù)雖有較小的最大加速度,但其啟停階段有加速度的階躍變化,而擺線函數(shù)的最大加速度雖較大,但卻有較好的連續(xù)性。因此,筆者綜合兩者的優(yōu)點將加速度函數(shù)設(shè)計成一種組合分段函數(shù),其中擺線函數(shù)的1/n周期由矩形函數(shù)的定值K2代替。
加速度函數(shù)的表達(dá)式:
(14)
速度函數(shù)的表達(dá)式:
(15)
位移函數(shù)表達(dá)式:
(16)
沖擊函數(shù)表達(dá)式:
(17)

3 擺線與不同組合函數(shù)性能對比
本研究比較擺線函數(shù)與不同組合函數(shù)的位移、速度、加速度以及沖擊函數(shù)曲線。由于曲線的對稱性,下文只截取1/4周期的變化曲線進(jìn)行對比分析,其結(jié)果如圖3~6所示(其圖例中,不同組合函數(shù)括號中的數(shù)表示其組合方式,例:“組合函數(shù)(1/n)”表示該組合函數(shù)有1/n周期是由矩形函數(shù)構(gòu)成的)。
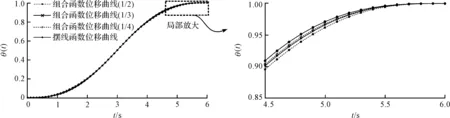
圖3 位移對比圖
如圖3所示,從位移的變化曲線來看,幾種軌跡規(guī)劃的位移曲線在啟停階段變化緩慢,而在1/8周期處(3 s)快速增長。不同組合方式下的組合函數(shù)和擺線函數(shù)的位移曲線近似一致,隨著n值的增大,位移曲線在啟停階段愈加平緩。n→∞時組合函數(shù)的曲線與擺線函數(shù)相重合。所以從位移對比圖來看,組合函數(shù)軌跡規(guī)劃具有較好的啟停平穩(wěn)性。
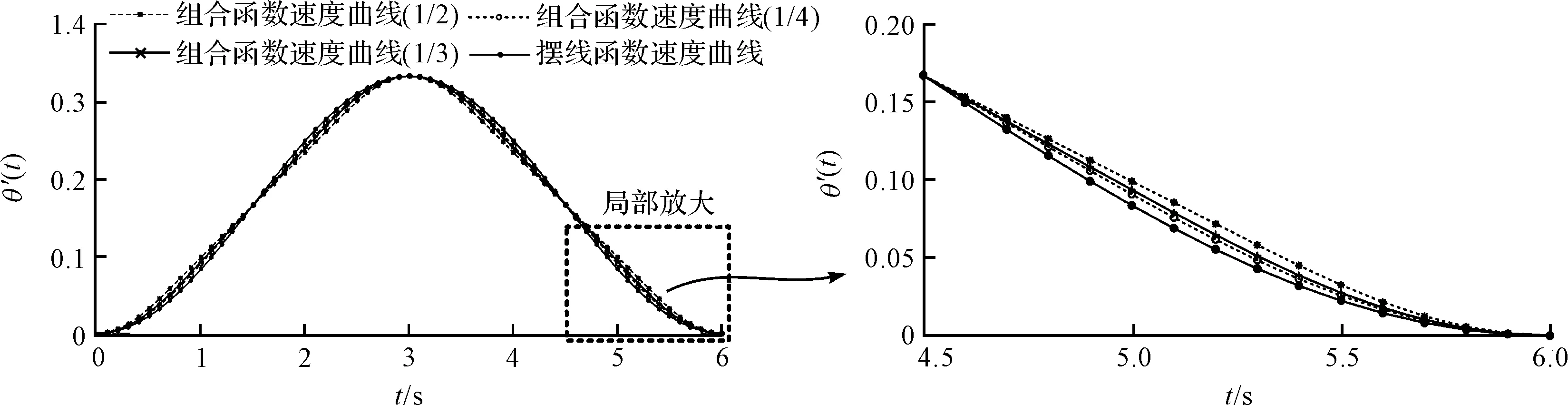
圖4 速度對比圖
如圖4來看,幾種軌跡規(guī)劃的速度曲線差別也不大,組合函數(shù)的n值越大,曲線在啟停階段愈加平緩,1/16周期處(1.5 s)速度快速增長,1/8周期處(3 s)速度達(dá)到最大。n→∞時組合函數(shù)與擺線函數(shù)重合。從速度曲線也可以看出,組合函數(shù)軌跡規(guī)劃具有相對較好的啟停平穩(wěn)性。

圖5 加速度對比圖
如圖5所示,從加速度曲線來看,組合函數(shù)驅(qū)動的加速度曲線最大值相對于擺線函數(shù)較小,且隨著n值的增大,最大加速度越大。相比于擺線函數(shù),組合函數(shù)加速度的減少量與運(yùn)動角度的變化幅值U有關(guān)。以1/2周期為矩形函數(shù)的組合函數(shù)加速度曲線為例,其最大無量綱加速度約為0.14,而擺線函數(shù)的最大無量綱加速度為0.18。而加速度最大值是衡量機(jī)構(gòu)動力學(xué)特性的重要指標(biāo)之一,最大加速度越大,機(jī)構(gòu)的最大慣性力就會越大。因此,雖然位移曲線和速度曲線兩種軌跡相似,但是相比于擺線,組合函數(shù)函數(shù)作為驅(qū)動,機(jī)構(gòu)的動力學(xué)特性更優(yōu)。

圖6 沖擊對比圖
如圖6所示,從沖擊曲線來看,相比于擺線函數(shù),組合函數(shù)驅(qū)動的最大剛性沖擊雖然略微大一些,但在整個運(yùn)動周期中,組合函數(shù)只是在啟始階段和中間一段會產(chǎn)生沖擊。因此,相比于擺線函數(shù),采用組合函數(shù)形式驅(qū)動的機(jī)構(gòu)運(yùn)行穩(wěn)定性要更好些。
綜上所述,基于擺線函數(shù)和矩形函數(shù)的組合函數(shù)不僅在位移和速度上具有較好的啟停平穩(wěn)性,能夠滿足腳踝康復(fù)患者運(yùn)動過程平穩(wěn)性的要求,而且可保證整個康復(fù)運(yùn)動周期內(nèi),機(jī)構(gòu)最大慣性力和沖擊均較小,從而提高機(jī)構(gòu)運(yùn)行的穩(wěn)定性。
4 ADAMS仿真實驗分析
不妨以n=2的組合函數(shù)軌跡為例,基于ADAMS仿真軟件,探討前敘兩種函數(shù)驅(qū)動下各推桿的輸出規(guī)律與末端參考點的運(yùn)動軌跡。研究表明,人體踝關(guān)節(jié)安全運(yùn)動范圍如表1所示[21-22]。

表1 人體踝關(guān)節(jié)安全運(yùn)動范圍
將各運(yùn)動的安全范圍值代入驅(qū)動函數(shù),可得不同康復(fù)運(yùn)動下的運(yùn)動曲線及各推桿相應(yīng)位移。篇幅所限,僅以跖屈/背屈運(yùn)動為例,仿真主要流程如圖7所示。

圖7 跖屈/背屈運(yùn)動仿真流程圖
由上述流程可得在不同函數(shù)驅(qū)動下,各推桿的位移、速度、加速度以及末端參考點的運(yùn)動規(guī)律。
兩種組合函數(shù)驅(qū)動下,1/4個跖屈/背屈運(yùn)動周期內(nèi),各推桿位移、速度、加速度對比圖如圖8所示。

圖8 兩種函數(shù)驅(qū)動下推桿各參數(shù)對比圖
由圖8(a~b)可知,組合函數(shù)驅(qū)動患者腳踝進(jìn)行跖屈/背屈運(yùn)動時,位移和速度都與擺線差別不大,兩種方法均具有較好的平穩(wěn)性,啟停階段速度均為0,無階躍變換。但相比于擺線函數(shù),如圖8(c)所示,雖然在仿真的過程中,由于存在接觸力約束,以及各推桿與動平臺之間的相互滑移,加速度曲線有一些波動,但根據(jù)基本變化規(guī)律,可得組合函數(shù)最大加速度相比于擺線函數(shù)減小近1 mm/s2。仿真實驗驗證了前述兩種函數(shù)驅(qū)動下各參數(shù)的變化規(guī)律。
將末端連接桿(1)與搖桿(2)的連接點O1作為參考點(如圖1所示),考察其相對于原點O的運(yùn)動規(guī)律,結(jié)果如圖9所示。
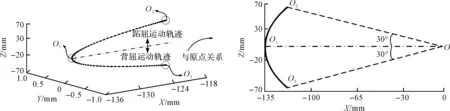
圖9 末端參考點運(yùn)動軌跡
由圖9可知,末端參考點在動平臺進(jìn)行跖屈/背屈運(yùn)動過程中,以點O1(-135,0,0)作為節(jié)點,進(jìn)行上下往復(fù)運(yùn)動,上部和下部分別為動平臺進(jìn)行跖屈運(yùn)動和背屈運(yùn)動時,參考點的軌跡。跖屈運(yùn)動時,參考點從O1(-135,0,0)運(yùn)動至O2(-118,0,68),背屈運(yùn)動時,參考點從O1(-135,0,0)運(yùn)動至O2(-118,0,-68)。從參考點運(yùn)動軌跡與原點之間的關(guān)系可知,通過3個推桿的相互配合運(yùn)動,實現(xiàn)了機(jī)構(gòu)動平臺-30°~30°的跖屈/背屈運(yùn)動。
5 結(jié)束語
基于新型混聯(lián)式腳踝康復(fù)機(jī)器人,本研究將傳統(tǒng)擺線函數(shù)與矩形函數(shù)相組合,提出了一種組合函數(shù)形式的軌跡規(guī)劃。
本研究通過構(gòu)建機(jī)構(gòu)并聯(lián)部分各支鏈封閉的幾何回路,對所提機(jī)構(gòu)的逆向運(yùn)動學(xué)進(jìn)行了研究,得到了各推桿與動平臺之間的關(guān)系。
與傳統(tǒng)擺線函數(shù)的軌跡規(guī)劃相比,本研究所提組合函數(shù)形式的軌跡規(guī)劃在保證機(jī)構(gòu)運(yùn)動平穩(wěn)性的前提下,可減小機(jī)構(gòu)運(yùn)動最大加速度,減小康復(fù)運(yùn)動過程中的沖擊。
基于運(yùn)動學(xué)逆解,本研究求出了跖屈/背屈運(yùn)動下各推桿的輸出,并將其導(dǎo)入ADAMS仿真軟件中進(jìn)行仿真實驗,得到了各推桿的位移、速度、加速度實際對比圖以及末端參考點的運(yùn)動規(guī)律。
總之,本文提出了一種啟停平穩(wěn)性較好,最大速度/加速度、剛性沖擊較小的組合函數(shù)形式應(yīng)用于一種新型混聯(lián)式腳踝康復(fù)機(jī)構(gòu),通過理論對比和實驗分析,驗證了該組合函數(shù)相比于傳統(tǒng)擺線函數(shù)的優(yōu)勢,為腳踝康復(fù)機(jī)器人的控制提供了基礎(chǔ)數(shù)據(jù)。
[1] 汪家琮.踝關(guān)節(jié)和足的康復(fù)[J].中國康復(fù)理論與實踐,2008,14(12):1197-1198.
[2] GIRONE M J, BURDEA G C, BOUZIT M. Rutgers ankle orthopedic rehabilitation interface[J].ASMEDynamicSystems&ControlDivisionDSC,1999,67(1):305-312.
[3] DAI J S, ZHAO T, NESTER C. Sprained ankle physiotherapy based mechanism synthesis and stiffness analysis of a robotic rehabilitation device[J].AutonomousRobots,2004,16(2):207-218.
[4] SAGLIA J A, DAI J S, CALDWELL D G. Geometry and kinematic analysis of a redundantly actuated parallel mechanism that eliminates singularities and improves dexterity[J].JournalofMechanicalDesign,2008,130(12):1786-1787.
[5] TAKEMURA H, ONODERA T, DING M, et al. Design and control of a wearable stewart platform-type ankle-foot assistive device[J].InternationalJournalofAdvancedRoboticSystems,2012,9(5):1-7.
[6] JAMWAL P K, XIE S Q, HUSSAIN S, et al. An adaptive wearable parallel robot for the treatment of ankle injuries[J].IEEE/ASMETransactionsonMechatronics,2014,19(1):64-75.
[7] AGRAWAL A, BANALA S K, SANGWAN V, et al. Design of a novel two degree-of-freedom ankle-foot orthosis[J].JournalofMechanicalDesign,2007,129(11):1137-1143.
[8] YOON J, RYU J, LIM K B. Reconfigurable ankle rehabilitation robot for various exercises[J].JournalofFieldRobotics,2006,22(S1):S15-S33.
[9] 劉穎超.氣動并聯(lián)式踝關(guān)節(jié)康復(fù)機(jī)器人的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué)機(jī)電學(xué)院,2014.
[10] 曾達(dá)幸,胡志濤,侯雨雷,等.一種新型并聯(lián)式解耦踝關(guān)節(jié)康復(fù)機(jī)構(gòu)及其優(yōu)化[J].機(jī)械工程學(xué)報,2015,51(9):1-9.
[11] LU Y, ZHAO X Q, ZHANG Z X, et al. Research on improved cycloid foot trajectory of quadruped robot[J].AppliedMechanics&Materials,2013(278-280):576-581.
[12] 莊 鵬,姚正秋.基于擺線運(yùn)動規(guī)律的懸索并聯(lián)機(jī)器人軌跡規(guī)劃[J].機(jī)械設(shè)計,2006,23(9):21-24.
[13] LEI J, WANG F, YU H, et al. Energy efficiency analysis of quadruped robot with trot gait and combined cycloid foot trajectory[J].ChineseJournalofMechanicalEngineering,2014,27(1):138-145.
[14] FRANCIS B, ELLIOTT A, WELDON M. Smoothing group-based trajectory models through B-splines[J].JournalofDevelopmentalandLife-CourseCriminology,2016,2(1):113-133.
[15] Dai Z, Sheng X, Hu J, et al. Design and implementation of Bézier curve trajectory planning in DELTA parallel robots[C]. International Conference on Intelligent Robotics and Applications, Portsmouth: Springer International Publishing,2015.
[16] JAHANPOURJ, MOTALLEBI M, PORGHOVEH M. A novel trajectory planning scheme for parallel machining robots enhanced with NURBS curves[J].JournalofIntelligent&RoboticSystems,2016,82(2):257-275.
[17] 田西勇,劉曉平,莊 未,等.基于組合正弦函數(shù)的機(jī)器人軌跡規(guī)劃方法[J].機(jī)械工程與自動化,2008(1):136-138.
[18] MA S, YANG L, LIU Z, et al. Trajectory planning of 6-DOF manipulator based on combination function method[C]. Chinese Control and Decision Conference, Los Angeles:IEEE,2014.
[19] 盧君宜,楊慶華,高 峰,等.五自由度農(nóng)業(yè)采摘機(jī)器人軌跡規(guī)劃[J].機(jī)電工程,2010,27(12):1-6.
[20] 徐 達(dá),夏 祥,李 華,等.基于組合函數(shù)的彈藥裝填機(jī)器人軌跡規(guī)劃[J].裝甲兵工程學(xué)院學(xué)報,2013,27(2):47-50.
[21] ORTEGA A B, MRMOL E Q, VALDES G V, et al. Control of a virtual prototype for ankle rehabilitation[C]. International Conference on Intelligent Environments, Guanajuato: IEEE,2012.
[22] LIU G, GAO J, YUE H, et al. Design and kinematics analysis of parallel robots for ankle rehabilitation[C]. International Conference on Mechatronics and Automation, Harbin: IEEE,2006.
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護(hù)理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45