基于UniTire模型的平順性和操縱穩定性協同研究?
2018-03-15 10:55:52張初旭
汽車工程 2018年2期
關鍵詞:模型
李 杰,高 雄,王 維,張初旭
前言
平順性和操縱穩定性是汽車的兩個重要性能,以往大多單獨對平順性或操縱穩定性進行研究[1-3],忽略了兩個性能之間的聯系和相互影響。
開展平順性和操縱穩定性協同研究,首先應該選用合理的技術路線。試驗研究、虛擬樣機技術和理論分析是進行協同研究的3種技術路線。
試驗研究能檢驗理論分析成果和發現研究存在的問題,但缺點是需要實物樣機、成本高周期長。虛擬樣機技術是采用商業化軟件如Adams,Carsim和Trucksim等開展研究,省去了理論建模和軟件研發等工作,缺點是只能當黑箱使用、前處理工作量巨大和一般也要存在實物樣機才能應用。理論分析采用質量、阻尼、剛度和幾何參數等描述實際零部件,通過定律和定理建立力學、數學和仿真模型,可合理設置自由度,參數確定的工作量少,求解迅速,效果令人滿意,且一般可以無需實物樣機。
平順性和操縱穩定性之間通過輪胎發生聯系。當汽車行駛在不平路面上時,會引起輪胎垂直載荷變化,導致輪胎側偏力變化,因而對操縱穩定性產生影響[4]。
UniTire模型是由郭孔輝提出的表達在各種工況下輪胎特性的模型,具有很好的理論性、實用性和很高的精度[3-5]。
本文中基于UniTire模型,同時考慮路面不平度對平順性和操縱穩定性進行協同研究,采用理論分析方法建立具有一般意義的協同模型,提出一次實現兩個性能協同仿真的算法,既可克服單獨研究的局限性,也有助于更好認知兩個性能之間的聯系,為汽車性能優化和動力學控制等提供新的研究思路。
1 輪胎和路面的模型
1.1 UniTire模型
UniTire模型側向力表達式[4-5]為
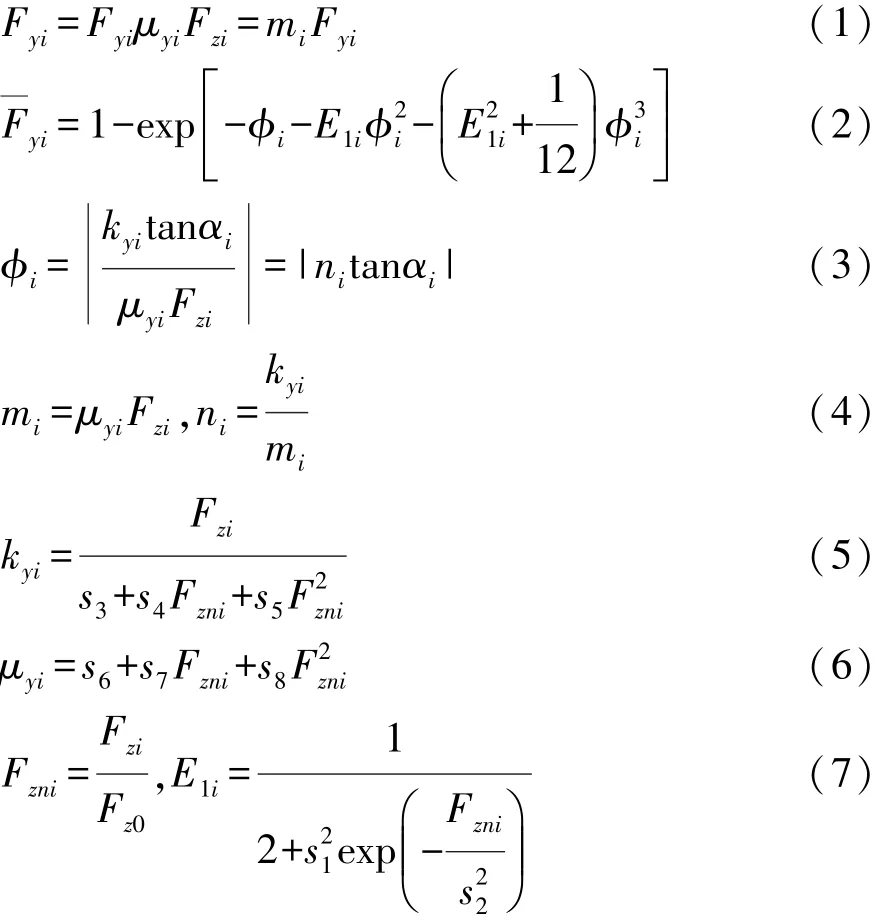
式中:Fyi為輪胎側偏力;Fyi為無量綱輪胎側偏力;μyi為側向摩擦因數;Fzi為輪胎垂直載荷;φi為無量綱側向滑移率;kyi為輪胎側偏剛度;αi為輪胎側偏角;Fzni為無量綱垂直載荷;Fz0為輪胎額定載荷;s1~s8為單一工況UniTire模型側向特性參數;mi和ni為中間參數。
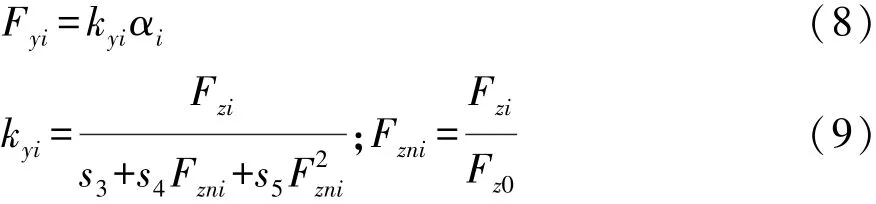
UniTire模型是非線性模型,它退化為線性模型時,側向力表達式為
1.2 濾波白噪聲路面模型
前輪路面不平度激勵 qf的濾波白噪聲模型[6-7]為

式中:nq為下限截止空間頻率;u為車速;n0為參考空間頻率;Gq(n0)為路面不平度系數;w為均值為0、方差為1的標準高斯白噪聲。
采用1階Pade逼近描述同一車道上滯后前輪的后輪路面不平度激勵qr[8],推導得
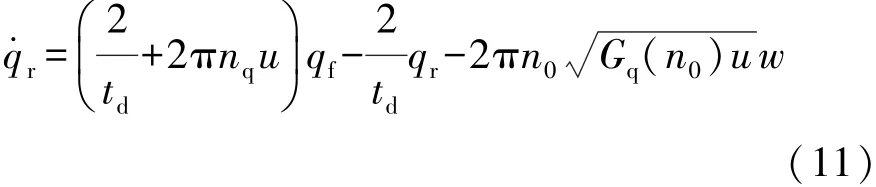
式中:td=(a+b)/u為后輪滯后前輪時間;a,b分別為車身質心到前、后軸的縱向距離。
2 平順性和操縱穩定性的平面模型
2.1 平順性4自由度平面模型
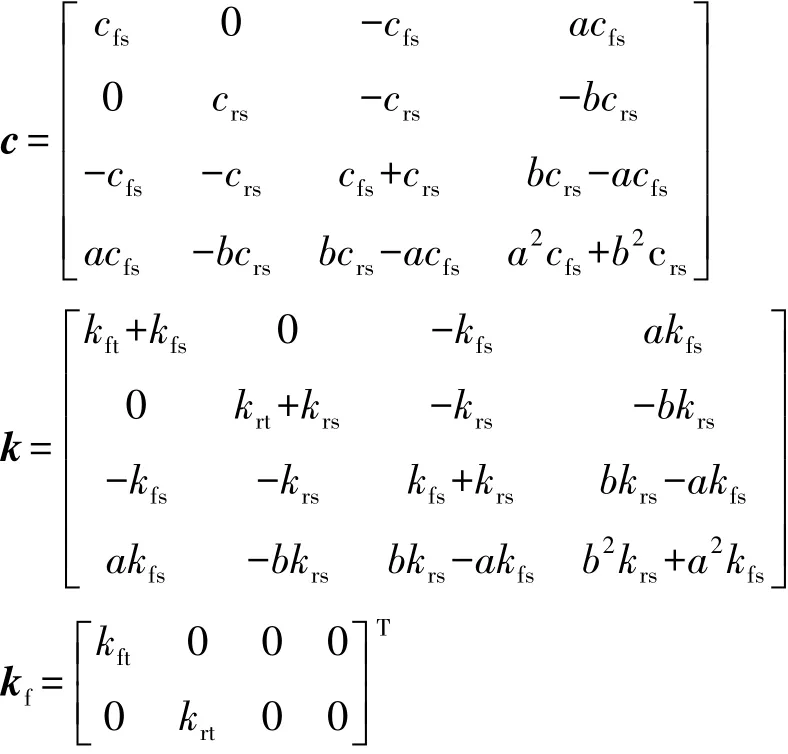
采用平面假設,建立平順性4自由度平面模型。其中,自由度為車身質心垂直位移zb、車身繞質心角位移zby,前、后軸非簧載質量的垂直位移zf,zr;慣性參數為車身質量mb,車身繞其質心的轉動慣量mby,前、后軸非簧載質量mf,mr;阻尼參數為前、后軸懸架的垂直阻尼cfs,crs;剛度參數為前、后軸懸架的垂直剛度 kfs,krs,前、后軸輪胎的垂直剛度 kft,krt。
對平順性4自由度平面模型,應用拉格朗日方法,有

其中 z=[zf,zr,zb,zby]T;q=[qf,qr]T
前、后懸架動撓度ffd,frd分別為

前、后軸輪胎靜載Gf,Gr由靜態平衡關系推導得出:

在不平路面上行駛時,前、后軸輪胎動載Ffd,Frd分別為

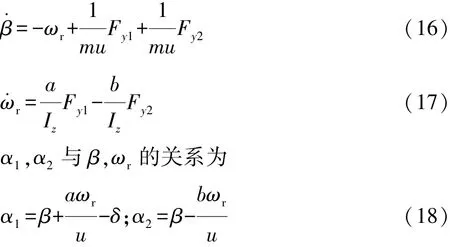
2.2 操縱穩定性2自由度平面模型
基于平面假設,且假設行駛在不平路面上,汽車簡化為2自由度平面模型。其中,自由度為汽車質心側偏角β,汽車橫擺角速度ωr;慣性參數為汽車質量m,汽車橫擺轉動慣量Iz,輪胎參數為前、后輪胎側偏角 α1,α2,前、后輪胎側偏力 Fy1,Fy2;輸入為前輪轉角δ。
對操縱穩定性2自由度平面模型,應用牛頓第二定律,有
在不平路面行駛時,前、后軸載荷Fz1,Fz2為

汽車質心側向加速度ay為

3 平順性和操縱穩定性協同模型與實現
3.1 路面的狀態方程
取 q=[qf,qr]T,聯立式(10)和式(11),路面的狀態方程為

3.2 平順性的狀態方程
對式(15)進行變換,得到平順性的狀態方程為

3.3 操縱穩定性的狀態方程
取 x2=[β,ωr]T,聯立式(16)和式(17),得到操縱穩定性的狀態方程為

3.4 協同模型
綜合路面、平順性和操縱穩定性的狀態方程,可建立平順性和操縱穩定性協同模型。
首先,聯立式(21)和式(22),得


其次,聯立式(24)和式(23),得


在不平路面上行駛時,Fy1,Fy2與 α1,α2,Fz1和Fz2有關,由UniTire模型決定。為了求解,需要引入下述表示,即
3.5 協同仿真算法
平順性和操縱穩定性協同模型仿真,是由式(25)結合UniTire模型,在時域內進行求解,獲得平順性和操縱穩定性的響應量序列,具體的仿真算法如下:
(1)總模擬時間、采樣時間分別取T,Δt,計算離散點的個數 N=T/Δt+1,離散時間點 ti=i×Δt,i=0,1,2,…,N,i=0,設置{x(0)}=0;
(2)由式(25)計算矩陣M,N和Q;
(3)生成N個離散點的高斯白噪聲序列w(i),i=1,2,…,N;
(4)由式(19)、式(14)和式(15)計算Fz1(i)和Fz2(i),i=1,2,…,N;
(5) 給定 δ,由式(18)計算 α1(i)和 α2(i),i=1,2,…,N;
(6)對非線性UniTire模型,由式(1)~式(7)計算Fzn1(i)和 Fzn2(i),E11(i)和 E12(i),ky1(i)和ky2(i),μy1(i)和 μy2(i),m1(i)和 m2(i),n1(i)和 n2(i),φ1(i)和 φ2(i),Fy1(i)和Fy2(i),i=1,2,…,N;
對線性UniTire模型,由式(8)和式(9)計算ky1(i)和 ky2(i),Fy1(i)和 Fy2(i),i=1,2,…,N;
(7)應用4階龍格 庫塔方法求解式(25),得到{x(i)},i=1,2,…,N;
(8)由{x(i)}得到協同模型各響應的時間序列,通過二次差分運算,得到加速度響應。
3.6 協同仿真結果和分析
采用某轎車參數,取B級路面和常用車速u=60km/h,前輪轉角δ=0.1rad,單一工況UniTire模型側向特性參數通過輪胎試驗獲得。按照協同模型仿真算法,采用Matlab開發仿真軟件,對協同模型進行仿真,仿真結果,即路面激勵、平順性和操縱穩定性的響應如圖1~圖3所示。
由圖1可見,前輪和后輪的路面激勵在同樣的范圍變化,且兩者存在一定滯后時間,說明基于濾波白噪聲模型能模擬前后輪的路面激勵。
圖2示出車身質心加速度、車身俯仰角加速度、前后懸架動撓度和前后車輪相對動載的變化與范圍,由這些結果可分析乘坐舒適性、懸架布置合理性和行駛安全性。而且,這些振動響應量不隨輪胎模型而變化。
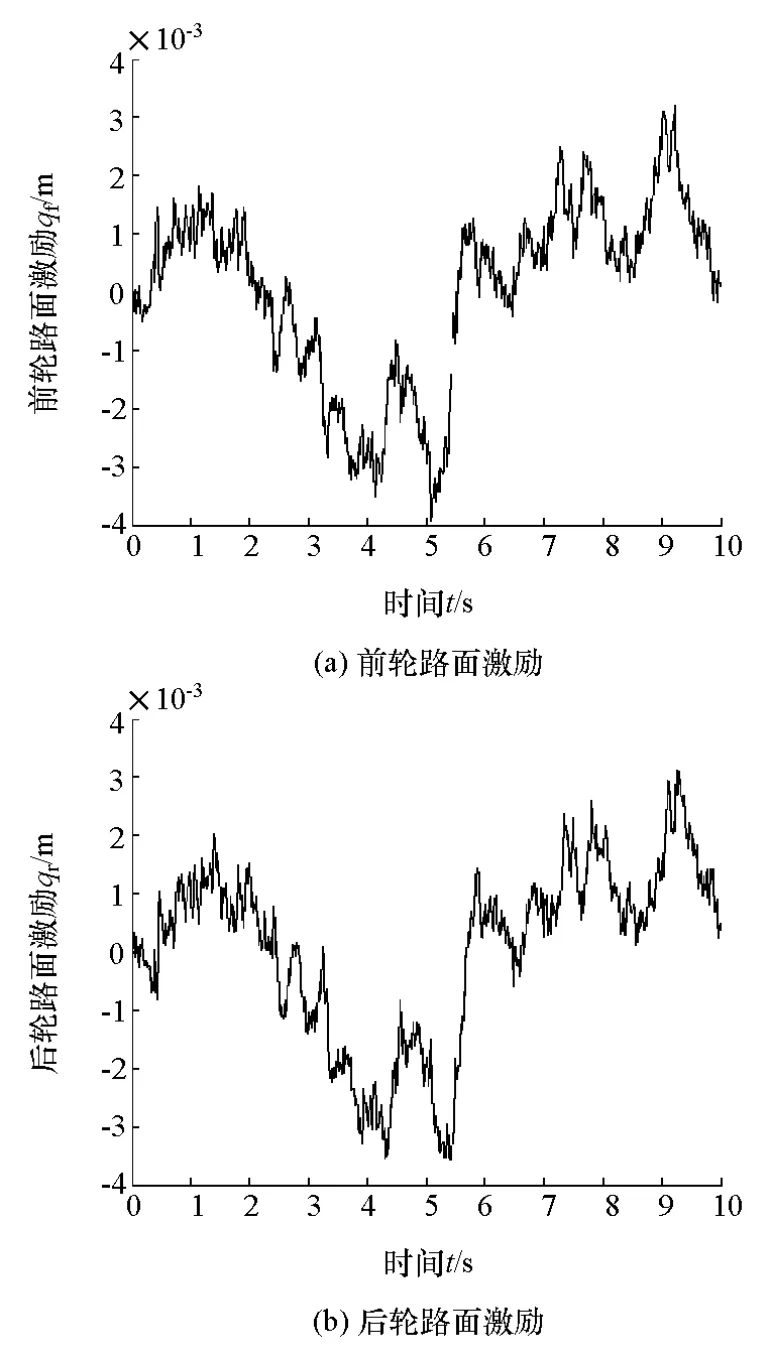
圖1 路面激勵仿真結果
由圖3可見:前輪固定轉角輸入的質心側偏角、橫擺角速度和側向加速度的變化與范圍;這些響應都會出現一定程度的波動,說明協同模型體現出路面不平度對操縱穩定性的影響;線性UniTire模型和非線性UniTire模型的操縱穩定性結果不同,由圖可明顯看出,線性輪胎模型仿真得到的質心側偏角、橫擺角速度和側向加速度,都大于非線性輪胎模型仿真的對應結果,說明以往采用線性輪胎模型研究操縱穩定性偏于保守。
采用響應均方根值并考慮響應正負表示響應的綜合效果,協同模型與單獨的平順性模型和操縱穩定性模型結果的比較,如表1和表2所示。應當說明的是,由于均方根值沒有考慮響應的負號,如果響應的主要結果是負號,為反映響應的負號,在均方根值前加負號作為綜合表示。
由表1可見,平順性模型和協同模型的車身質心加速度、車身俯仰加速度、前后懸架動撓度和前后車輪相對動載完全相同,說明操縱穩定性模型對平順性模型沒有影響。
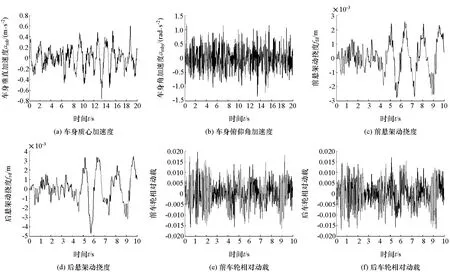
圖2 平順性仿真結果
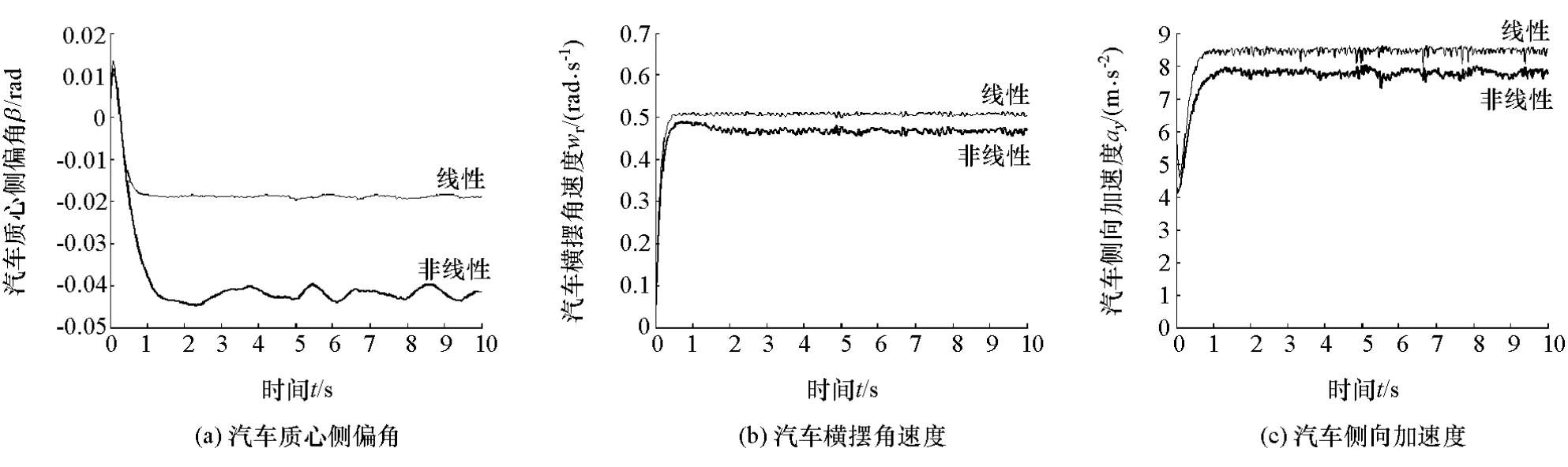
圖3 操縱穩定性仿真結果

表1 平順性模型和協同模型響應的比較

表2 操縱穩定模型和協同模型響應的比較
由表2可見,操縱穩定性模型和協同模型的質心側偏角、橫擺角速度和側向加速度不同,但兩種模型仿真得到3個參數的大小并無一定的規律。
4 結論
基于UniTire模型,考慮不平路面,采用前后輪路面不平度激勵的濾波白噪聲模型、平順性4自由度平面模型、操縱穩定性2自由度平面模型,通過狀態方程建立了平順性和操縱穩定性6自由度平面協同模型,并給出了相應的協同仿真算法,開發了相應的Matlab仿真軟件,可以一次實現前后輪路面不平度激勵、平順性和操縱穩定性的仿真。
進行了不平路面下某轎車平順性和操縱穩定性的協同仿真,結果表明:對于操縱穩定性,線性輪胎模型仿真得到的質心側偏角、橫擺角速度和側向加速度都大于非線性輪胎模型仿真的對應結果;對于平順性模型和協同模型,兩者同樣的響應的結果是相同的;而對于操縱穩定性模型和協同模型,兩者同樣的響應的結果不同,但兩種模型仿真得到3個參數的大小并無一定的規律。由此說明,平面協同模型能體現平順性對操縱穩定性的影響,不能體現操縱穩定性對平順性的影響,這主要是由于操縱穩定性模型沒有與平順性平面模型耦合的力學量。因此,有必要建立空間協同模型,以便全面反映平順性和操縱穩定性之間的影響關系。
[1] 余志生.汽車理論[M].北京:機械工業出版社,2010.
[2] 李杰,王文竹,趙旗,等.基于虛擬激勵法的軍用汽車隨機振動分析[J].汽車工程,2016,38(3):368-372.
[3] 郭孔輝.汽車操縱動力學原理[M].南京:江蘇科學技術出版社,2011.
[4] 陳煥明,郭孔輝.輪胎性能對車輛操縱穩定性影響的仿真研究[J].汽車工程,2015,37(5):491-494,505.
[5] 郭孔輝.UniTire統一輪胎模型[J].機械工程學報,2016,52(7):89-98.
[6] 陳紹維.微型客車平順性建模、仿真及參數匹配研究[D].長春:吉林大學,2011.
[7] 朱延蕾.多軸重型特種汽車在不同路面下振動性能的仿真與評價[D].長春:吉林大學,2014.
[8] 陳璐,王雨順.保結構算法的相位誤差分析及其修正[J].計算數學,2014,36(3):271-290.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19