基于紅外信標的室內定位設計
2018-03-15 06:03:37姚萬業魏立新
許昌學院學報 2018年2期
姚萬業,魏立新,張 華
(華北電力大學 控制與計算機工程學院,河北 保定 071003)
近幾年來,隨著計算機網絡技術、無線傳感器技術的發展,社會的需求,室內定位技術在商場導購、餐廳服務等諸多領域中得到廣泛應用,同時室內定位的研究也是國內外研究的熱點.在過去的這些年里,對定位的研究主要使用的是GPS,RFID,超聲波,藍牙,WLAN等技術.然而,采用GPS定位多用于室外,對于室內環境,受障礙物及建筑物的影響,其定位精度下降嚴重.雖然用于室內定位的RFID,超聲波,WLAN等技術可以提供從幾米到幾十厘米的定位精度[1].然而,射頻系統對電磁感應敏感,在很多場合不能使用,有很大的局限性;另外依靠無線信號的定位系統,受電磁干擾影響,不能給予精確定位.
此外,現在有些科研人員提出了基于VLC(VisibleLight Communication)的室內定位技術,因為LED具有高速調制及響應時間短的特性,從而使得LED的應用從照明領域擴展到通信領域[2],常用的可見光定位技術主要是基于三角形法,該方法需要估計發射端和接收端的距離,而實現測距的方法有很多如接受信號強度(RSS)、到達時間(TOA)、到達時間差(TDOA)、到達角度(AOA)等[3].
可見光定位可以將其分為非成像定位技術和成像定位技術兩種,在文獻[4]中,吳楠,王旭東等人基于接收信號強度定位技術,提出一種利用多個LED發射端實現室內定位的方法,就是非成像定位技術中的一種;在文獻[5]中利用LED照明陣列作為可見光通信(VLC)發送部分,從陣列中至少4個LED發射的三維坐標通過兩個光學透鏡被接收,然后由兩個圖像傳感器解調信息,并使用圖像傳感器中接收到的LED圖像的距離幾何關系計算出目標的位置.在文獻[6]中也有對成像定位技術的簡單介紹.
然而這兩種定位都有其缺陷.對于非成像定位的思想需要為每一個發光信標編碼,同時要有相應的解碼機制,制作成本高,另外不論是選擇RSS、TOA、TDOA還是AOA中那種測距方法,其技術難度都是很大的,不易實現.而如果選擇成像傳感器定位,LED可見光又很容易受室內已有燈光和自然光的影響.
在文獻[7]中,趙響,林基明針對室內可見光定位系統的參數優化問題,計算了基于成像傳感器接收的接收機位置的估計理論極限,求出了估計量的克拉美羅下界.通過仿真實驗,他們得出可見光與成像傳感器結合可以實現精確的定位,定位精度為毫米級,定位誤差的影響因子在于傳感器距屋頂高度,透鏡的焦距,成像傳感器像素的大小,圖像讀取的幀速等.
成像定位技術在室內定位的研究中前景是好的.所以,在前人的研究基礎上,提出一種基于紅外信標的室內定位技術,首先在室內布置好已知坐標的紅外發射裝置,利用攝像頭作為接收裝置,通過STM32F407控制兩自由度云臺,使信標的像一直處于成像傳感器的中心,而后通過測量云臺的水平轉角與垂直轉角,計算出目標相對信標的實際位置.制作成本低,算法實現簡單,適宜于餐廳,酒店等服務領域.
1 紅外信標室內定位
紅外信標的原理就是由有限個紅外光源組成一個集合,通過改變集合中元素的數量或元素的排列方式,使得每一個光源集合對應一個唯一確定的位置信息,也就是編碼.而后通過成像傳感器接收到信標的信號,識別出對應的ID,獲取信標的位置信息,然后通過目標與信標直接的空間位置關系求得目標的實際位置坐標.
1.1 紅外成像
光包括可見光和不可見光,可見光就是我們通常所說的紅、橙、黃、綠、青、藍、紫這七種,其中紅光的波長一般在600~750 nm范圍內,波長超過750 nm小于1 000 μm的光就是紅外光.同時,0.75~1.5 μm的光叫近紅外光;1.5~4.0 μm的光叫中紅外光;4.0~1 000 μm的叫遠紅外光.
雖然人眼無法感知紅外光,但不管是CCD還是CMOS圖像傳感器可以感知所有的光.而常見CCD光譜響應曲線[8]見圖1.從圖中可以看到CCD傳感器光譜響應范圍從400~1 100 nm,如果不對成像傳感器做一些處理的話,攝像機拍出來的照片和我們人眼看到的效果是有很大差別的.為解決這個問題,攝影師們通常會在攝像機的鏡頭前添加紅外濾光片,過濾掉人眼不可見的紅外光,使得圖像傳感器接收到的都是可見光.

圖1 常見CCD光譜響應

圖2 攝像頭和濾光片
用同樣的思路,在攝像機的鏡頭前添加一塊濾光片,就可以把可見光過濾掉只剩下紅外光,這樣圖像傳感器所成的像就是紅外成像.紅外光成像就是將人眼不可見的紅外線通過特殊的裝置轉換為可見或可測的信號.紅外成像系統一般可以分為主動式和被動式兩種[9].本文將采用主動式成像技術,使用可以產生940 nm近紅外光的紅外LED燈制作紅外信標,同時在攝像機鏡頭前加上了940 nm的濾光片,見圖2.通過這種方式使得成像傳感器只能感知940納米附近的紅外光,而不會讓可見光被成像傳感器所接收.
1.2 信標的設計
所謂的信標(路標)就是指,目標通過所攜帶的傳感器對外界環境進行感知而能夠識別的特征信息.目標在移動的過程中,通過自身攜帶的傳感器識別出環境中固定位置的信標,而后根據信標和目標之間的位置關系,在已知信標的位置情況下計算出目標的實際位置.
常見的信標根據信標與環境之間的關系,可以將信標分為自然信標和人工信標兩種.自然信標是指本身就存在于環境當中的物體或者特征,如房間的墻角,頂棚的吊燈;人工信標就是在環境中人為的加入某物或某種特征,其目的就是為了完成目標的定位.
以往的信標設計多以簡單的顏色或者數字作為路標圖案[10].文獻[11]以變電站巡檢機器人為背景,提出了一種多元M序列的人工路標設置方法.該方法在盡可能減少路標種類的情況下,擴大路標的特征差異,從而提高定位對測量噪聲的抗干擾能力.
紅外信標屬于人工信標,作為人工信標起碼需要滿足兩點要求:首先,信標易于識別,同時不同信標可以區分,每個信標都代表唯一不同的一個ID值;其次,每個信標需要提供幾個特征值用于定位計算.在此基礎上,本文提出用有限個紅外LED組成一個集合,通過改變集合中元素的個數或元素的排列方式,使得每一個紅外LED集合對應一個唯一確定的位置信息,如圖3所示.圖中A和B位置上的LED是信標提供的特征點,1,2,3位置上的紅外LED燈可以任意改變,對于1,2,3每一個位置上,如果有紅外LED表示1,沒有表示0,這樣就會產生23=8種結果,也就是說會有8種唯一與之對應的ID值.
使用圖3的信標設計基本滿足一般情況的室內定位需求,同時由A,B作為信標的位置特征,會很方便定位目標計算自身的實際坐標值,同時這種設計結構使得每個LED燈的距離最大,便于識別.本文設計的紅外信標如圖4所示.

圖3 紅外信標示意圖 圖4 紅外信標實物圖
1.3 紅外信標定位原理
信標定位的方式在很早的時候就已經被提出,利用電感、電磁耦合及雷達反射傳輸特性的射頻識別定位技術就可以看做是一種信標定位.在該定位系統中,將射頻讀寫器放置在待測目標上,射頻電子標簽(信標)嵌入到室內環境中,電子標簽上存儲有位置識別的信息,讀寫器通過有線或無線形式連接到信息數據庫[12].前文介紹路標可分為自然路標和人工路標,在文獻[13]中,提出利用室內墻棱邊與墻平面(Edge&Plane)做路標,在已知環境地圖的前提下,當檢測到某一墻棱邊L與墻平面LM,通過待定位目標身上自帶的測距傳感器測出目標與墻棱邊L的距離、與墻平面LM的距離,同時知道L的坐標,與它的夾角,就可以求得目標的實際坐標.文獻[14]首先設計了一種抗干擾能力強,易于識別的人工路標,然后建立雙目立體視覺系統,通過左右視覺傳感器識別到路標,根據路標和傳感器直接的空間位置關系,計算出待測目標的實際位置.
雙目視覺在應用中算法復雜,成本較高,本文采用的是一種基于紅外信標的室內定位,首先利用紅外LED設計出人工路標,然后利用成像傳感器識別這些紅外信標.當識別到某一定位信標,通過待測目標上的云臺移動使得當前信標的中心在成像傳感器的中心成像,最后根據信標的空間坐標、云臺轉角求出待測目標的實際坐標.
首先讓紅外信標的中心的像落在圖像的像素中心,也就是說第一步要使得定位平臺識別出紅外信標的ID,并且讀取信標中心當前的像落在了圖像的那個位置,而后計算出該位置到圖像中心點的差值,通過PID后輸出控制信號使得云臺轉動,最終讓信標中心的像落在圖像中心上.圖5是信標通過濾光片在攝像機所成的像.根據信標的識別算法,很容易知道該信標的ID值和信標的中心坐標.信標的中心坐標值是根據圖3中 A.、B圓心坐標的平均值獲得,信標的ID值獲得可以見表1,依據ID-Map可以得知當前信標的ID值,同時知道該信標代表的實際坐標值(X,Y,Z).
計算出信標像的中心值,之后控制云臺使得這個中心可以落在圖像的中心上.在該過程中,通過角度傳感器將會測出云臺上下兩個電機的旋轉角度,水平的角度傳感器測得角度是水平電機以坐標軸X為0度角,旋轉得到的角度,垂直的角度傳感器測得角度是垂直電機以水平面為0度角旋轉的角度,見圖6.
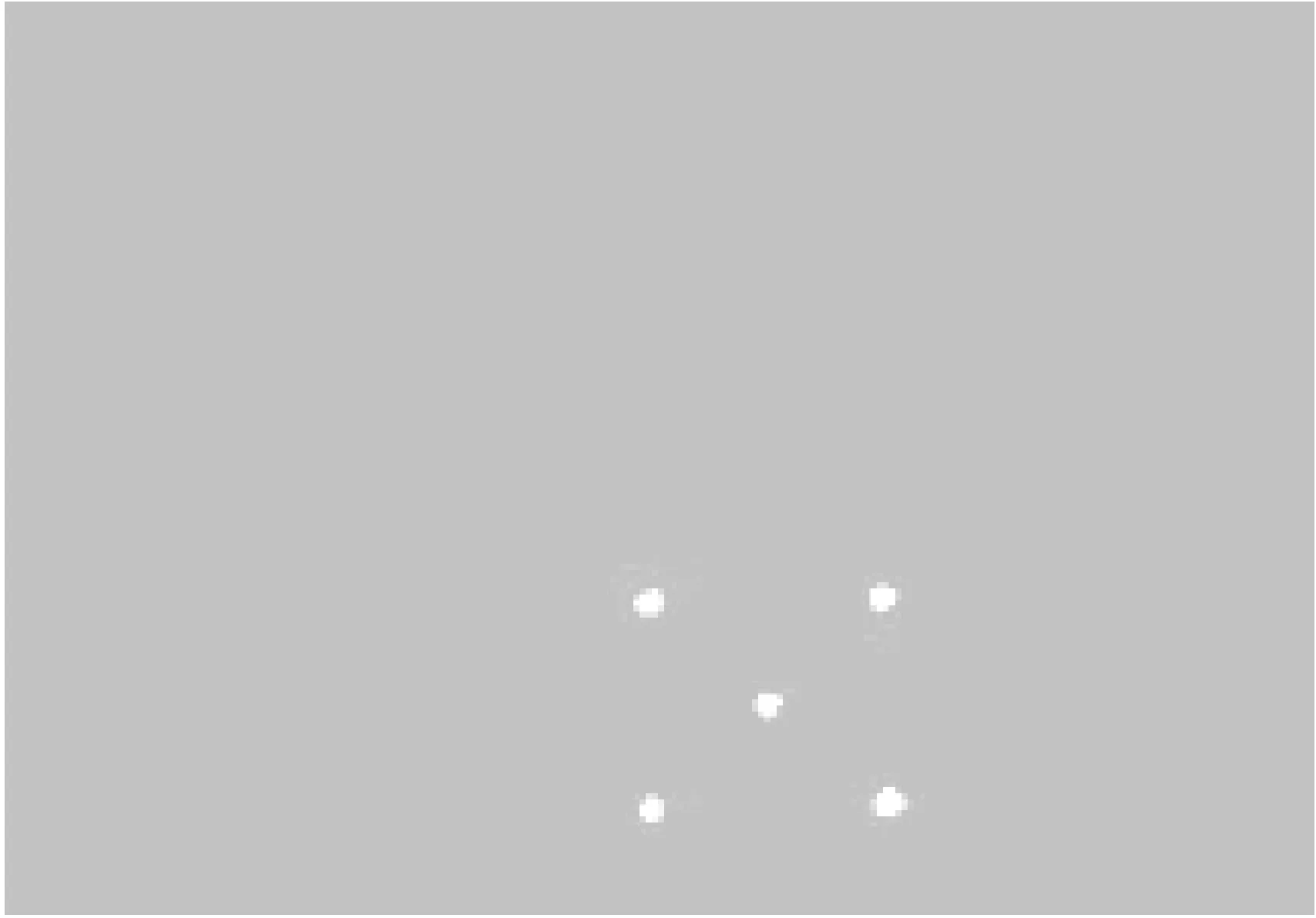
圖5 紅外信標成像

LED個數LED位置(以下符號見圖1-3)ID號2A,B13A,B,12A,B,23A,B,344A,B,1,25A,B,2,36A,B,1,375A,B,1,2,38
圖6中a點是紅外信標發射端,b點是信號接收端;A點是平面坐標的原點,AB線作為水平方向的基準線,垂直角度傳感器測得的角度是以水平面為基準.根據平行線定理,圖中角β就是水平角度傳感器測得的角度,圖中角α就是垂直角度傳感器測得的角度.無論是理論上還是實際中,信標到水平面的垂直距離是不變的,圖中h是一個定值.

(1)
由式(1)可知,X、Y、h都是已知的,只要測得α和β的值,就可以確定唯一的x和y的值.現如今傳感器技術發展迅速,已經十分成熟,市面上常見的角度傳感器精度可以達到12位以上,甚至有精度可以達到18位的角度傳感器.就拿12位精度的角度傳感器,其測量精度可以達到0.088度.所以很容易獲得目標的實際坐標.
2 實驗與結果
本次實驗采用STM32作為控制器,同時有兩個12位精度的角度傳感器,兩個步進電機和攝像頭構成待測目標,紅外信標作為信號發射裝置.STM32上將連接藍牙信號發射模塊,每隔2秒STM32控制器向PC端發送一次定位信息.實驗以300*300cm平面模擬室內面積,將紅外信標裝置固定在150cm的高度上,本實驗使用了信標ID為8,規定紅外信標的坐標為(0,0,150).本文定位平臺見圖7所示.
定位平臺放在實驗環境中,平臺將會沿直線移動,每隔2s向PC端發送一個定位結果,測得數據和計算所得坐標值都通過串口打印,如圖8所示.
定位平臺在模擬室內環境中,沿一條長300cm的直線移動,在移動的過程中每隔2s輸出一次目標的當前位置坐標,圖8是目標一次實驗得到的數據,包含了15個數據點.使用MATLAB模擬該次定位,可以比較直觀的觀察到,定位系統的測量坐標偏移路徑和實際坐標的情況,見圖9所示.

圖6 紅外信標定位模型
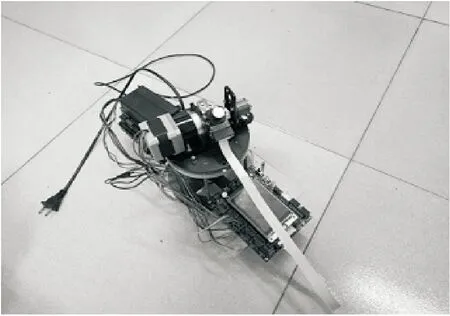
圖7 定位平臺

圖8 目標位置顯示

圖9 路徑模擬
使用MATLAB對15個數據進行定量分析,橫向最大偏移值是5.6cm,縱向最大偏移值是6.1cm,定位目標本次沿直線移動所得數據的均方差為2.68,也就是說該組實驗數據離散度較小,數據的可靠性較高,滿足實驗前的預估.為了實驗的準確性,在不改變定位路徑的前提下一共測得25組數據,計算所測數據的均方差為3.73,本設計的定位精度在10cm范圍內,滿足大多數室內環境的定位需求,因此該設計方案是實用的.
3 結語
常見的室內定位方式,設計復雜,數據處理繁重,或者定位精度不高,實用性差.本文提出的基于紅外信標的室內定位設計,不影響正常光照情況下日夜使用,設計簡單易行,滿足對定位精度要求不是很高的室內環境,尤其是適用于賓館酒店地形簡單的場所.對于本文提出的設計,在信標識別和云臺設計方面可以改進,將會進一步提高系統的定位精度.
[1] 胡晴晴,王旭東,吳 楠.基于距離加權的室內可見光定位算法[J].光電工程,2015,42(5):82-87.
[2]OkadaH,IshizakiT,YamazatoT,etal.Erasurecodingforroad-to-vehiclevisiblelightcommunicationsystems[C].ConsumerCommunicationsandNETWORKINGConference.IEEE, 2011: 75-79.
[3] 張 倩.基于無線網絡的高精度定位方法研究與實現[D].南京:東南大學,2010.
[4] 吳 楠,王旭東,胡晴晴,等.基于LED的高精度室內可見光定位方法[J].電子與信息學報,2015,37(3):728-732.
[5]DambulKD,O’BrienDC,FaulknerG.IndoorOpticalWirelessMIMOSystemWithanImagingReceiver[J].IEEEPhotonicsTechnologyLetters, 2011, 23(2): 97-99.
[6] 許銀帆,黃星星,李榮玲,等.基于LED可見光通信的室內定位技術研究[J].中國照明電器,2014(4):125-128.
[7] 趙 響,林基明.室內可見光成像傳感器定位系統的理論極限[J].西安電子科技大學學報:自然科學版,2016,43(4):64-68.
[8] 郭 陽,徐心和.在基于形狀信息的視覺識別中顏色信息的應用[J].儀器儀表學報,2006,27(s1):758-759.
[9] 劉曉龍.基于被動式紅外路標的移動機器人室內定位技術研究與嵌入式實現[D].北京:北京工業大學,2012.
[10]BriggsAJ,ScharsteinD,BraziunasD,etal.Mobilerobotnavigationusingself-similarlandmarks[C].IEEEInternationalConferenceonRoboticsandAutomation, 2000.Proceedings.ICRA.IEEE, 2000, 2: 1 428-1 434.
[11] 唐恒博,陳衛東,王景川.基于多元M序列的人工路標設置方法[J].機器人,2014,36(1):29-35.
[12] 趙嘉琦,遲 楠.室內LED可見光定位若干關鍵技術的比較研究[J].燈與照明,2015(1):34-41.
[13] 唐 琎,白 濤,蔡自興.移動機器人的一種室內自然路標定位法[J].計算機工程與應用,2005,41(15):44-47.
[14] 劉振宇,姜 楠,張令濤.基于人工路標和立體視覺的移動機器人自定位[J].計算機工程與應用,2010,46(9):190-192.
