一種交叉足競走機器人機械結構的設計與研究
2018-03-17 08:28:26唐瑜謙
價值工程 2018年8期
摘要: 本文設計了一種交叉足競走機器人的機械結構,該機器人能夠模擬人的左右腿進行行走,主要結構包括機器人的頂板、腿部結構、連接結構、腳板等機械機構,并繪制了該機器人的CAD模型和三位立體模型。通過對該雙足競走機器人的設計和制作,并進行了運行試驗,該機器人能夠完成相應的穩定行走動作,該機械結構能夠有效應用于教學、競賽等領域。
Abstract: This paper designed the mechanical structure of the cross foot walking robot, and the robot can simulate people around the leg to walk. The main structure comprises the robot roof, leg structure, connection structure, mechanical foot mechanism, and the CAD model of the robot and three-dimensional model are proposed. Through the design and manufacture of the cross foot walking robot, and running test are given. The robot can complete the corresponding stable walking action, and the mechanical structure can be effectively applied to teaching, competition and other fields.
關鍵詞: 交叉競走機器人;機械結構;減速伺服電機
Key words: cross foot working robot;mechanical structure;deceleration servo motor
中圖分類號:TG580.23+1 文獻標識碼:A 文章編號:1006-4311(2018)08-0148-02
0 引言
仿人機器人技術融合了機械設計、結構設計、模型分析、控制技術、計算機技術等,仿照人的運動機理,進行機器人的設計和研究。機器人的機械結構作為機器人最重要的基礎設計,通常使用CAD、Soildworks等軟件進行整體機械機構的設計。仿人機器人能夠模仿人的動作,在機器人研究領域中有著重要的理論研究價值,并且相關研究成果與現實社會聯系緊密,有著不可忽視的現實意義[1-2]。目前的機器人的研究中,雙足機器人的設計具有重要研究意義和使用價值,仿人型雙足行走機器人可以大大地幫助人類解決很多問題,比如馱物,搶險,等一系列危險或繁重的工作[2]。
基于以上研究意義和價值,本文設計了一種交叉足競走機器人的機械結構[3-4],該機器人只設計機器人的雙腿結構。該機器人能夠模擬人的左右腿進行行走,主要結構包括機器人的頂板、腿部結構、連接結構、腳板等機械機構,并繪制了該機器人的CAD模型和三位立體模型[5-6]。本文首先介紹了交叉競走機器人的總體結構設計,并給出了機器人的總體結構三維模型立體圖,然后對機器人的機械結構的設計進行描述和分析,包括機器人的頂板和腳板詳細設計、機器人腿部結構的詳細設計。最后通過運行試驗,驗證了本文所設計的交叉足競走機器人的合理性和有效性。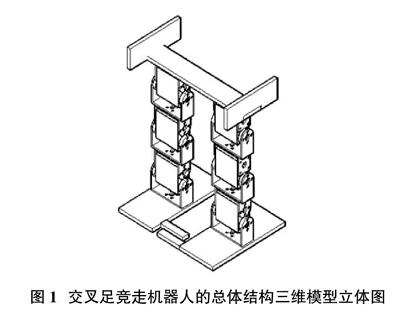
1 交叉足競走機器人的總體結構設計
交叉足競走機器人的總體結構三維模型立體圖如圖1所示,包含交叉足競走機器人的頂板、機器人左腿、機器人右腿、機器人的左腳板、機器人的右腳板。交叉足競走機器人左腿和右腿均為一個3自由度的結構構成,每一個自由度由一個金屬結構件和一個伺服電機組成;機器人的頂板為一個U型結構,方便放置單片機控制器和7.4V直流電源;機器人的腳板為帶齒結構,前端和后端均有一個長方形小齒,實現機器人的穩定前后交叉運行。
2 交叉足競走機器人機械結構設計
2.1 機器人的頂板和腳板
交叉足競走機器人的頂板和腳板如圖2所示,2(a)為機器人的頂板的俯視圖,2(b)為其中一個腳板的俯視圖,兩個腳板為一個對稱結構。為了方便設計和加工,本文采用2mm的黑色的亞克力板作為材料來制作和加工,因為亞克力板是輕型高硬度材料,易于切割和打孔。
2.2 機器人腿部結構
交叉足競走機器人腿部結構如圖3所示,圖3(a)為機器人的正視圖,3(b)為機器人的側視圖。交叉足競走機器人腿部結構包含左腿和右腿,每條腿均由一個3自由度的結構構成,每一個自由度由一個金屬結構件和一個伺服電機組成。每個自由度代表一個關節,每個關節可以實現0-180度的旋轉,實現機器人行走動作的模擬。通過該結構的設計,可以實現機器人的前進、后退、前跟頭,左轉、右轉等動作。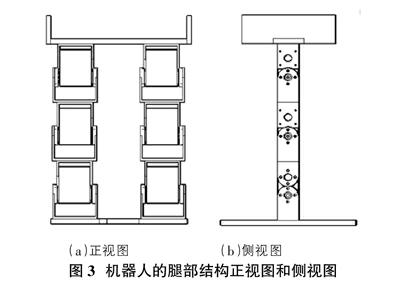
2.2.1 伺服電機
本文設計的交叉足競走機器人選用伺服電機來實現和模擬人的關節運動。伺服電機的好壞決定了機器人行走的質量,為了保證機器人的運行平穩、執行到位,通常選用扭力在12-15kg左右的伺服電機,結構件的尺寸與型號決定的關鍵是在于舵機的尺寸型號,所以制作機器人要優先決定好舵機的尺寸與型號。
本伺服電機選用雙軸伺服電機,包含一個主動輪和一個從動輪,相關參數見表1。該伺服電機的重量為60g,尺寸大小為40*20*40.5mm,速度為0.16sec/60°7.2V,堵轉扭矩為15kg/cm 7.2V,工作電壓為5-7.2V,工作電流>100mA。其中主動輪的舵盤的安裝孔間距為14mm,直徑為20mm,其中花齒孔徑5.5mm,花齒數量25,使用4個M3攻絲安裝孔。
2.2.2 金屬結構件
金屬結構件主要用于機器人關節的連接,固定于交叉足競走機器人的頂板、腳板和伺服電機上。結構件大小和尺寸的設計取決于伺服電機的尺寸和大小。為了便于結構簡的設計和加工,交叉足競走機器人的結構件采用鋁材的作為材料進行制作,鋁材具有硬度高、質量輕、易加工等優點。結構件的尺寸如圖4所示,長度為52mm,寬度為25mm,高度為42.5mm,厚度為2.5mm。
3 機器人的結構分析與實驗
基于上面交叉足競走機器人的設計,為了驗證本文所設計的交叉競走機器人設計的合理性、穩定性和可行性,通過機器人的直走、前滾翻、后退、左轉彎、右轉彎等動作完成率,來進行運行試驗分析。
通過每個動作的20次試驗,動作完成情況和完成率如表2所示,該結構機器人實現直走的后退動作的完成率均為100%,完成左轉彎和右轉彎的完成率為90%,完成前翻動作的完全率為80%。雖然本文所設計的機器人結構不能在20次試驗中,100%完成所有的動作,但是受限于只有雙足結構,一定程度上是符合設計要求的。本文所設計的交叉足競走機器人能夠有效完成的機器人相應的動作,該機器人能夠完成相應的穩定行走、后退等動作,該機械結構能夠有效應用于教學、競賽等領域。
4 結論
本文設計了一種交叉足競走機器人的機械結構,該機器人能夠模擬人的左右腿進行行走,主要結構包括機器人的頂板、腿部結構、連接結構、腳板等機械機構,文中給出了該機器人的CAD模型和三位立體模型。通過對該雙足競走機器人的設計和制作,并進行了運行試驗,該機器人能夠完成相應的穩定行走動作,證明了該機械結構的有效性和合理性。由于本文設計的交叉足競走機器人只有雙足結構,存在一定的問題,可以通過進一步的設計和改進,實現100%完成相關的動作,可以廣泛應用于教學、競賽等領域。
參考文獻:
[1]崔慶權,尹遜和,唐瑜謙.一種競賽型雙足競步機器人設計與研究[J]. 電子測量技術,2015(11):96-99.
[2]崔慶權.一種雙層頭部結構的雙足機器人:CN 205256500 U[P].2016.
[3]朱開波,等.機械工程基礎[M].西南交通大學出版社,2015.
[4]王占軍,趙玉剛,劉新玉.直角坐標型機器人機械結構與控制系統的設計[J].制造業自動化,2015(4):18-19.
[5]林悅香,潘志國,劉艷芬.工程制圖與CAD[M].北京航空航天大學出版社,2016.
[6]封金祥,姜隆,史曉君.機械制圖與CAD[M].北京理工大學出版社,2016.