低空機載LiDAR點云定位誤差分析
2018-03-20 03:05:32劉亞南
測繪工程 2018年3期
杜 婷,李 浩,楊 彪,蘇 博,劉亞南
(河海大學 地球工程與工程學院,江蘇 南京 211100)
近年來,隨著無人機等攝影硬件平臺技術的逐步成熟,一種新型、快捷的遙感系統——低空機載LiDAR系統應運而生。與傳統攝影測量相比,該系統因其具有較強的植被穿透能力,能更直接、高效獲取地面高精度點云數據;與傳統機載LiDAR技術相比,其靈活的飛行平臺、相對較低的硬件成本具有顯著優勢。因此,該系統在地形測量、防災減災、工程設計、地質勘查、林業資源調查等多領域具有廣闊的應用前景,并已取得了一些實質的研究成果[1-4]。
低空機載LiDAR系統的定位精度問題是該系統生產應用關心的核心問題。目前,LiDAR系統的定位精度評價主要集中在傳統機載LiDAR領域。為了定量分析點云的定位誤差,各種嚴格的LiDAR點云定位誤差模型已被提出。Schenk總結主要誤差源推導出系統誤差方程[5],張小紅根據Schenk的誤差模型,詳細推導了系統誤差公式[6]。然而,不同于傳統機載LiDAR,現有低空機載LiDAR系統普遍采用低成本POS裝置,飛行平臺穩定性也相對較差,其得到的點云誤差精度相對較低[7-9],因此怎樣通過設置飛行參數來保證精度是個難題。
為此,本文緊密結合現有低空LiDAR技術水平,分析航高、掃描角、IMU姿態角及其誤差、安置角誤差等主要因素對點云定位精度的影響,并探討了其影響規律,旨在為該系統的實際生產應用提供建議。
1 低空機載LiDAR系統組成及其主要誤差來源
低空LiDAR系統組成部分:
1)低空遙感平臺:包括載人小型直升機、動力三角翼、氣艇、旋翼無人機、固定翼無人機;通常飛行高度小于1 000 m,云下作業。
2)低空機載LiDAR掃描儀:按掃描原理分為有搖擺式掃描系統、旋轉多棱鏡掃描系統、光釬掃描系統三種。
3)POS裝置:包括GPS和IMU(IMU- Intertial Measurement Unit,慣性導航單元)。GPS設備通過實時差分或事后差分得到傳感器平臺的空間位置,IMU用于精確測定傳感器平臺的空間姿態角。
4)其它裝置:包括數碼相機、航線規劃與飛行控制器、系統供電裝置等;
由于低空機載LiDAR組成復雜,點云精度受很多因素影響,如IMU姿態角、姿態角誤差、偏心誤差等,其中偏心誤差是各儀器坐標系之間的平移誤差,一般來說,這種誤差在解算時可以消除,帶來的影響不大,所以在本文的分析中忽略偏心誤差。
根據《CHZ 3005-2010低空數字航空攝影規范》,目前低空LiDAR系統的主要影響參數見表1。

表1 現有低空LiDAR系統主要參數
2 低空機載LiDAR點云定位誤差模型
低空機載LiDAR系統是集成了多種先進技術的復雜系統,具體包括:測定攝影中心位置方位元素的動態GPS接收機系統;測定攝影中心姿態參數的姿態測量系統(IMU系統);測定傳感器到地面點距離的機載激光雷達測距系統等,各個系統之間定義的坐標系如圖1所示。
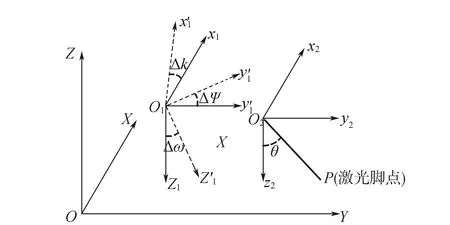
圖1 機載激光雷達系統坐標系
根據LiDAR激光測距儀測得的斜距ρ,POS系統記錄的飛行位置和姿態參數,以及各個坐標系統之間的轉換關系,推導出激光腳點定位方程[2]:
PW=PGPS+RIMU(RluRlbs+l0).
(1)
其中,PW是激光點在WGS-84中的坐標,PGPS是GPS天線相位中心在WGS-84中的坐標,RIMU是IMU姿態角旋轉矩陣,Rlu為安置角旋轉矩陣,Rlb為瞬時激光掃描系到激光掃描參考系的旋轉矩陣,s=(0,0,ρ)為激光腳點在瞬時激光掃描系的坐標,l0為GPS天線相位中心的偏心改正。
由于機載激光雷達掃描系統本身受到來自激光測距、姿態、飛行器位置等各種誤差的影響,在誤差相互獨立的情況下,對定位方程進行線性化:
(2)

式中:dX,dY,dZ為點云定位誤差分量,dXG,dYG,dZG為GPS定位誤差,Δx,Δy,Δz為偏心誤差。
由式(2)根據誤差傳播定律得
(3)
式中:mx是定位誤差X分量中誤差,mρ,mθ,mΔκ,mΔφ,mΔω,mH,mP,mR,mΔx分別是定位誤差影響因素的中誤差。定位誤差Y分量中誤差my、定位誤差Z分量中誤差mz形式與式(3)類似。
3 低空機載LiDAR點云定位誤差分析
低空機載LiDAR系統組成復雜,點云精度受很多因素影響,為了對點云定位誤差進行定量分析,假設這些誤差之間是不相關的,分別改變式(2)中的單個變量大小分析該變量的誤差對最終定位精度的影響,點云定位誤差與各個誤差的關系如圖2所示。其中m為定位中誤差,mx,my,mz分別為X方向中誤差、Y方向中誤差、Z方向中誤差。
當航偏角、俯仰角、側滾角皆為10°,最大掃描角60°,最大飛行高度1 000 m,按表1取航偏角中誤差0.1°,俯仰角、側滾角中誤差0.03°,安置角中誤差0.005°,掃描角中誤差0.005°,測距中誤差0.1 m時,各因素對定位誤差的影響分析。
3.1 航高對點云定位誤差的影響
保持其他參數不變的情況下,航高從0~1 000 m引起的定位誤差的變化如圖2(a)所示。在其他參數不變的情況下,航高與定位誤差之間的關系近似是線性的。
3.2 掃描角對點云定位誤差的影響
保持其他參數不變的情況下,掃描角從-60°~60°,引起的定位誤差的變化如圖2(b)所示。從圖中可以看出,在其他參數不變的情況下,掃描角大于0°時,掃描角越大,X,Z定位誤差越大。
3.3 IMU姿態角大小對點云定位誤差的影響
1)航偏角的影響。保持其他參數不變的情況下,航偏角從0°~15°變化時的定位誤差如圖2(c)所示。在其他參數不變的情況下,航偏角的變化對高程定位誤差沒有明顯的影響,航偏角越大,X定位誤差越大。
2)俯仰角的影響。保持其他參數不變的情況下,俯仰角從0°~15°變化時的定位誤差如圖2(d)所示。在其他參數不變的情況下,俯仰角的變化定位誤差沒有明顯的影響。
3)側滾角的影響。保持其他參數不變的情況下,側滾角從0°~15°變化時的定位誤差如圖2(e)所示。在其他參數不變的情況下,側滾角的變化與定位誤差近似呈線性關系。
3.4 姿態角誤差對點云定位誤差的影響
姿態角測量誤差主要影響因素為脫落漂移誤差、加速度計比例誤差、速度計常數誤差等[12]。
1)航偏角誤差的影響。保持其他參數不變的情況下,航偏角為10°時,其誤差從0°~0.1°變化時的定位誤差如圖2(f)所示。在其他參數不變的情況下,航偏角誤差的變化對定位誤差沒有明顯的影響。
2)俯仰角誤差的影響。保持其他參數不變的情況下,俯仰角為10°時,其誤差從0°~0.05°變化時的定位誤差如圖2(g)所示。在其他參數不變的情況下,航偏角誤差的變化與定位誤差近似成線性關系。
3)側滾角誤差的影響。保持其他參數不變的情況下,側滾角為10°時,其誤差從0°~0.05°變化時的定位誤差如圖2(h)所示。在其他參數不變的情況下,側滾角誤差的變化與定位誤差近似成線性關系。
3.5 安置角對點云定位誤差的影響
由于三個安置角對定位誤差的影響是類似的,本文分析一個安置角。保持其他參數不變的情況下,安置角從0°~0.01°變化時的定位誤差如圖2(i)所示。在其他參數不變的情況下,安置角誤差的變化對定位誤差沒有明顯的影響。
3.6 不同比例尺下的低空LiDAR作業參數的選擇
對各項誤差的分析,航高、掃描角、側滾角誤差對最終定位誤差的影響較大,基本是呈線性遞增的關系,側滾角誤差通過儀器制造商改正,實際作業時控制飛行航高和掃描角的大小即可以改善點云定位精度。
實際作業時,由相關測圖比例尺要求限制最終的定位誤差,參照誤差模型綜合分析圖2反推相應的飛行航高和掃描角,不同測圖比例尺要求下作業參數如表2所示。
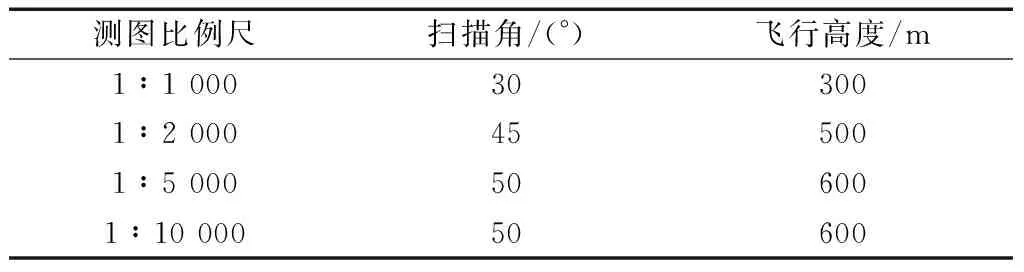
表2 不同比例尺作業參數
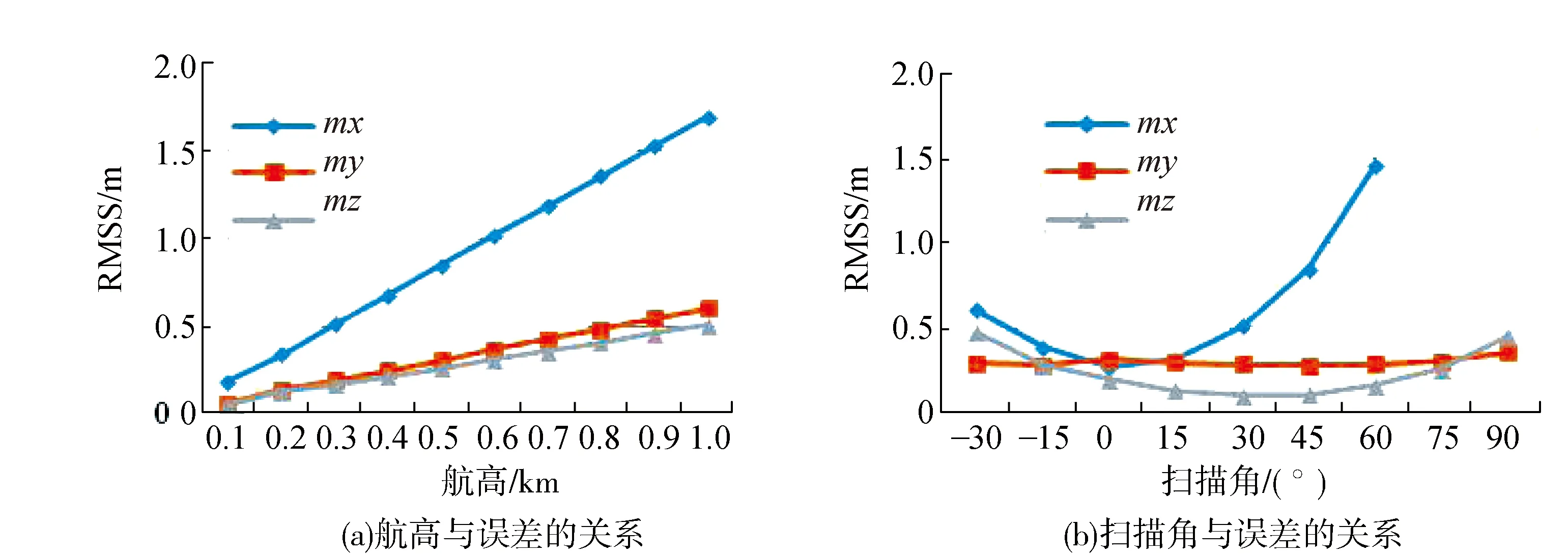
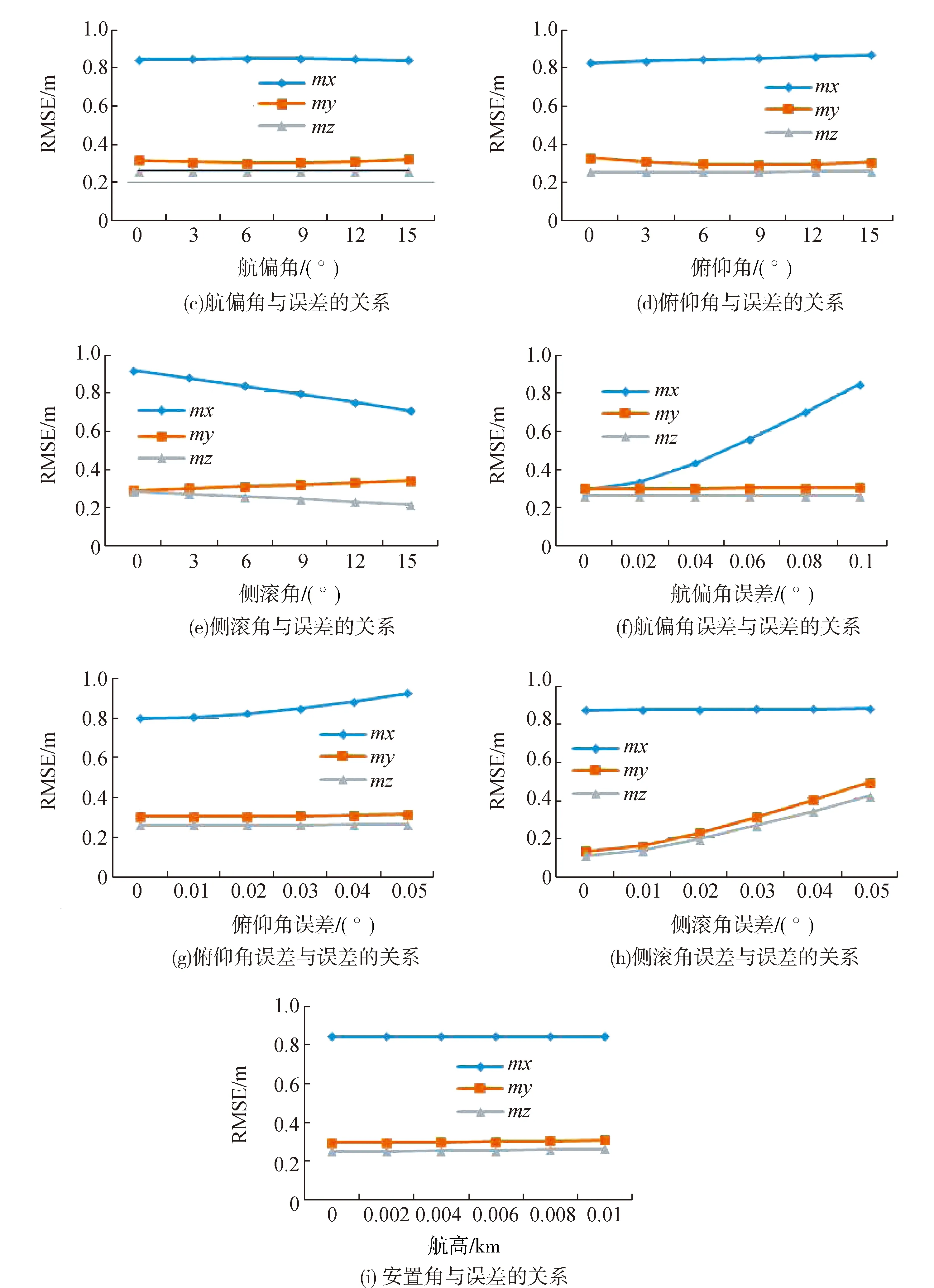
圖2 不同誤差對點云定位誤差的影響
4 實驗與分析
2015年10月,實驗選取長江河道江西九江至湖口張家洲河段為試驗區,采用動力三角翼搭載激光雷達及數碼相機同步進行數據采集,累計施測面積達60 km2。三維激光掃描系統為HawkScan1200(如圖3所示),系統的姿態角解算誤差為航偏角誤差為0.1°,俯仰角和側滾角誤差為0.03°。根據1∶2 000地形圖航空攝影測量數字化測圖規范按照表2作業參數設置相對航高約為500 m,飛行速度約100 km/h,掃描角范圍為-45°~45°。共采集29 587 722點,平均點云密度為:0.5點/m2。掃描區域的采集點云如圖4所示。

圖3 動力三角翼與HawkScan1200系統
根據采用儀器的參數代入誤差模型計算定位中誤差的理論值,計算得到該點云數據的平面中誤差和高程中誤差分別在0.270~0.847 m,0.104~0.120 m。
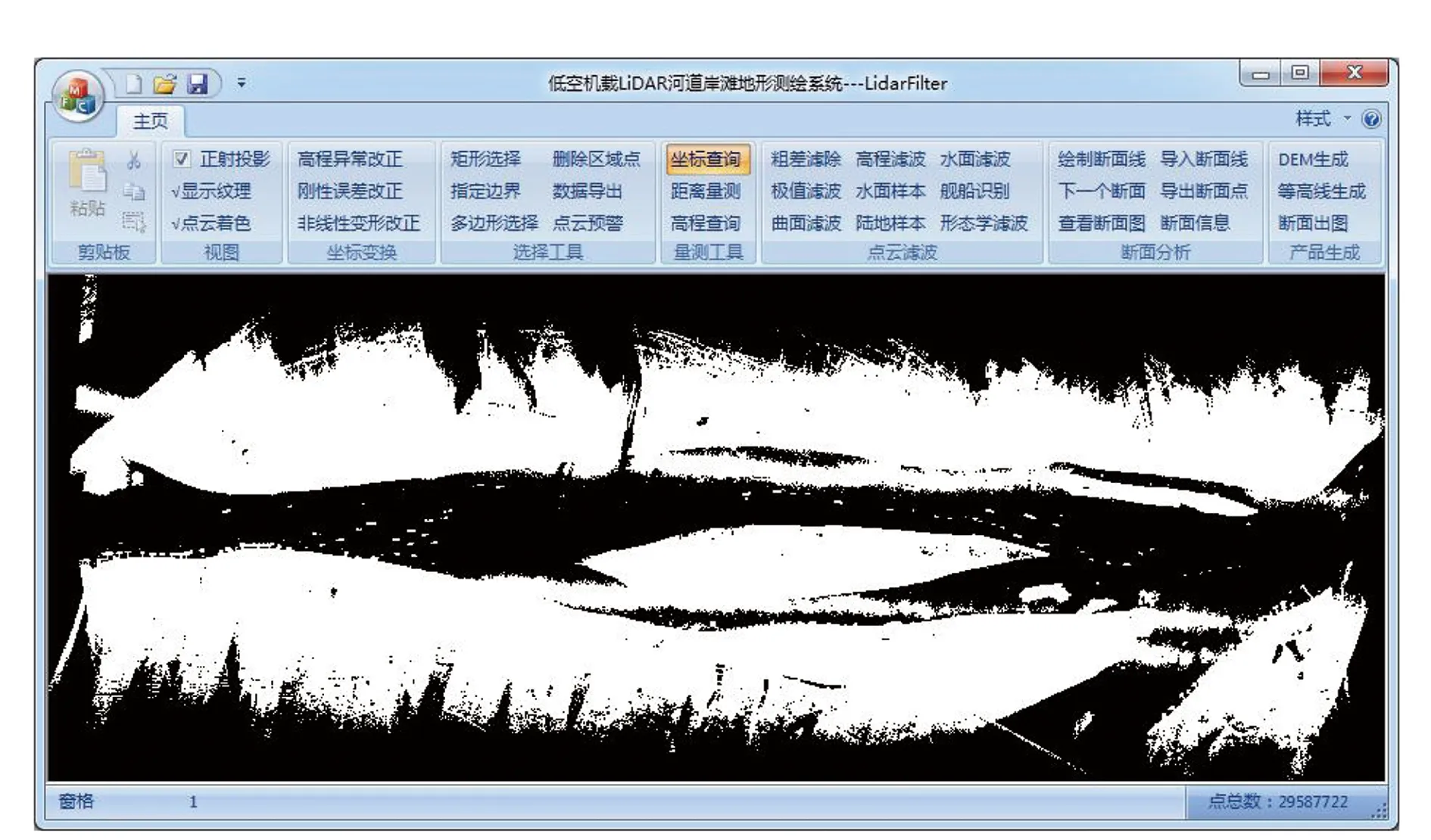
圖4 點云數據
從高程中誤差和平面中誤差兩方面來評價點云的實際定位誤差。對于高程誤差,選取道路中心、大堤兩側平坦地面、水平房頂等局部較為平坦的地表高程作為驗證高程,利用GPS-RTK在現場放樣出點的實際高程,將其與點云高程對比,并統計高程中誤差;對于平面誤差[10-11],由于LiDAR點云分布不規則,在LiDAR點云中難以像在高分辨率影像中那樣可精確選取控制點和連接點,所以需要根據測區中的建筑物墻面相交擬合兩條直線相交,取直線交點為建筑物角點,然后和實測建筑物角點進行對比,得到平面坐標誤差。實驗共選取3個驗證區,點云相應的實際定位誤差如表3所示。
根據表3實際點云定位誤差均在計算的理論精度范圍內,故該實驗的實際作業精度符合作業規范。

表3 點云實際定位精度
5 結束語
本文根據低空機載LiDAR點云定位誤差模型和目前商用低空LiDAR系統的性能,定量分析了航高、掃描角、IMU姿態角、姿態角誤差及安置角誤差對點云定位誤差的影響,得出結論:
1)掃描角和航高是影響點云定位誤差的主要因素,其對點云定位誤差的影響基本呈線性遞增關系;
2)本文研究的低空LiDAR的相關飛行參數符合相應比例尺要求下的點云精度要求,例如根據目前商用低空LiDAR系統的參數,按照飛行高度為500 m,掃描角度為45°內掃描的點云精度可以滿足1∶2 000測圖比例尺的要求。
[1] 許曉東, 張小紅, 程世來. 航空Lidar的多次回波探測方法及其在濾波中的應用[J]. 武漢大學學報(信息科學版), 2007, 32(9):778-781.
[2] 魯林, 周小成, 余治忠, 等. 隨機森林算法在機載LiDAR數據林分平均樹高估算中的應用研究[J]. 地球信息科學學報,2016,18(8):1133-1140.
[3] 陳功, 程正逢, 石克勤,等. 激光雷達在電力線路工程勘測設計中的應用[J]. 電力勘測設計, 2006(5):53-56.
[4] 楊穎, 朱磊, 張省,等. 直升機載LIDAR測量技術在高速公路改擴建勘測中的應用[J]. 地理信息世界, 2015, 22(5):104-107.
[5] SCHENK T. Modeling and recovering systematic errors in airborne laser scanners[J].Proceedings of OEEPE Workshop on Airborne Laser Scanning and Interferometer SAR for Detailed Digital Elevation Models, 2001: 40-48.
[6] 張小紅. 機載激光雷達測量技術理論與方法[M]. 武漢: 武漢大學出版社, 2007: 66-72.
[7] 劉經南, 張小紅, 李征航. 影響機載激光掃描測高精度的系統誤差分析[J]. 武漢大學學報(信息科學版), 2002, 27(2):111-117.
[8] 熊愛武, 楊蒙蒙. 機載LiDAR點云數據誤差分析[J]. 測繪通報, 2014(3):75-78.
[9] 李峰, 崔希民, 劉小陽,等. 機載LIDAR點云定位誤差分析[J]. 紅外與激光工程, 2014, 43(6):1842-1849.
[10] JIANG L F, TIAN L, GU Mei-Xia, et al. Effects of laser beam divergence angle on airborne LIDAR positioning errors[J]. Journal of Beijing Institute of Technology, 2012, 21(2):278-284.
[11] HUGENHOLTZ C H, WHITEHEAD K, BROWN O W,et al. Geomorphological mapping with a small unmanned aircraft system (sUAS): Feature detection and accuracy assessment of a photogrammetrically-derived digital terrain model[J]. Geomorphology, 2013, 194(4):16-24.
[12] LIN Y, HYYPPA J,JAAKKOLA A.Mini-UAV-borne LIDAR for fine-scale mapping[J]. IEEE Geoscience & Remote Sensing Letters, 2011, 8(3):426-430.
[12] 覃昕垚, 張建軍, 王勇,等. 機載LiDAR定位精度分析[J]. 測繪工程, 2016, 25(5):32-35.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00