基于傅立葉變換的灰度成像擴(kuò)展目標(biāo)跟蹤幀間圖像配準(zhǔn)方法?
2018-03-31 06:04:38秦雨萍
艦船電子工程 2018年3期
秦雨萍 張 萍 張 雙
1 引言
目標(biāo)的運(yùn)動(dòng)圖像序列為復(fù)雜背景下的目標(biāo)檢測(cè)提供了比目標(biāo)靜止時(shí)更多的有用信息,使得可以利用圖像序列檢測(cè)出單幀圖像中很難檢測(cè)出的目標(biāo)[1]。由運(yùn)動(dòng)目標(biāo)所形成的圖像序列可分為兩種情況:一種是靜止背景[2],一種是變化背景[3]。前一種情況通常發(fā)生在攝像機(jī)相對(duì)靜止的狀態(tài)(如監(jiān)視某一路口車流量的固定攝像機(jī)[4]),后一種情況通常發(fā)生在攝像機(jī)也在相對(duì)運(yùn)動(dòng)狀態(tài)(如裝在艦船[5]或飛機(jī)上的監(jiān)視系統(tǒng)[6])。從處理方法看,一般是采用突出目標(biāo)或消除背景的思想。對(duì)小弱目標(biāo),其信噪比低,目標(biāo)常常會(huì)淹沒于背景噪聲中,這時(shí)的目標(biāo)檢測(cè)通常采用突出目標(biāo)的方法,如李正周[7]運(yùn)用多幀形態(tài)膨脹累加取得較好的檢測(cè)效果。對(duì)于我們研究的擴(kuò)展目標(biāo)來(lái)說,由于目標(biāo)離成像傳感器較近,獲得的圖像質(zhì)量較小弱目標(biāo)好,因此我們的關(guān)鍵是從復(fù)雜背景中分離出擴(kuò)展目標(biāo)[8]。在運(yùn)動(dòng)背景下擴(kuò)展目標(biāo)的檢測(cè)中。目標(biāo)運(yùn)動(dòng)的同時(shí),攝像機(jī)也由于運(yùn)載平臺(tái)的姿態(tài)或位置改變而發(fā)生變化,因此運(yùn)動(dòng)目標(biāo)在圖像上造成的變化與背景自身的變化會(huì)混淆在一起,使得運(yùn)動(dòng)目標(biāo)的檢測(cè)變得復(fù)雜起來(lái)。為了能沿用靜態(tài)背景下的檢測(cè)思想,可考慮先將背景穩(wěn)住,即將連續(xù)幾幀圖像的相同背景穩(wěn)定在同一幅圖像的相同位置上,從而使運(yùn)動(dòng)目標(biāo)“暴露”出來(lái)。配準(zhǔn)是實(shí)現(xiàn)背景穩(wěn)定的重要方法。針對(duì)上述問題,本文提出了基于傅立葉變換的灰度成像擴(kuò)展目標(biāo)跟蹤幀間圖像配準(zhǔn)方法,并根據(jù)互能量方法計(jì)算出能量的偏倚量。實(shí)驗(yàn)表明,該方法能夠很好地實(shí)現(xiàn)平移變化中的圖像配準(zhǔn)。
2 算法描述
圖像配準(zhǔn)[9~13]技術(shù)可有效地剔除緩變背景的影響。在本文研究中,主要考慮較普遍的變化方式:平移變化。當(dāng)兩幀圖像的背景只有平移變化時(shí),計(jì)算出它們的平移量即可實(shí)現(xiàn)配準(zhǔn)。由于平移變化對(duì)圖像的相位信息影響較大,因此本文將采用相位相關(guān)的方法來(lái)實(shí)現(xiàn)圖像的配準(zhǔn)。

對(duì)M×M的圖像 fi( )k,l求其N×N 的傅立葉變換,可以得到:

其中N≥M ;k=0,1,…,M ;m=-N/2,…,N/2-1;n=-N/2,…,N/2-1。
在研究?jī)蓭瑘D像的互能量譜關(guān)系中,將兩幀圖像進(jìn)行離散相位相關(guān)的傅立葉變換,從而可以得到互能量譜關(guān)系函數(shù)[14~17]:

其中F2*為F2的復(fù)共軛。
將式(1)代入式(3)可以得到圖像 f2( )x,y 與圖像的互能量譜關(guān)系函數(shù):

根據(jù)平移理論得知,互能量譜的相位等于圖像間的相位差。將式(4)進(jìn)行傅立葉反變換,從而得到圖像的偏移量沖擊函數(shù)為

該沖擊函數(shù)在偏移位置處存在明顯的尖銳峰值,其它位置的值接近于零,所以據(jù)此就能找到兩圖像間的偏移量。
3 試驗(yàn)結(jié)果
為了驗(yàn)證算法的合理性,我們選用了大小為640×480的圖像序列,利用式(4)定義的互能量譜關(guān)系函數(shù)以及式(5)定義的圖像的偏移量沖擊函數(shù)進(jìn)行灰度成像擴(kuò)展目標(biāo)配準(zhǔn)試驗(yàn)。試驗(yàn)中(P4 2.5,1G內(nèi)存)每幀圖像處理平均時(shí)間分別為11.2ms和12.6ms,均小于20ms,故耗損資源極少,滿足實(shí)時(shí)性要求。
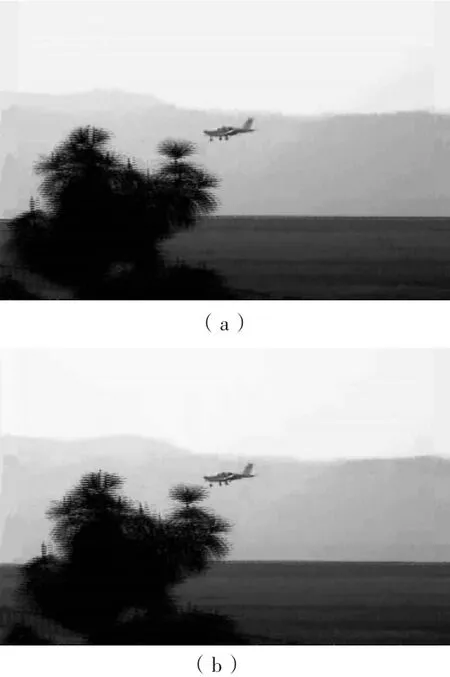
圖1 序列圖像
圖1 (a),(b)為序列圖像中相鄰兩幀圖像,從圖中可以看出,圖中參考物樹,運(yùn)動(dòng)目標(biāo)飛機(jī)均發(fā)生了一定的平移;圖2(a),(b)分別是其傅立葉變換的互能量譜,高脈沖為圖中檢測(cè)目標(biāo)飛機(jī)的相關(guān)脈沖量。圖3為兩幀圖像的偏移量沖擊函數(shù),很明顯可以看到一個(gè)沖擊脈沖,通過檢測(cè)其位置,得出其位置為(14,1),即圖1(b)參照?qǐng)D1(a)水平向右移動(dòng)14個(gè)像素,垂直向上移動(dòng)1個(gè)像素。為此在圖像配準(zhǔn)中,只需要將圖1(b)平移(-14,-1)即可實(shí)現(xiàn)兩幀圖像的配準(zhǔn)。
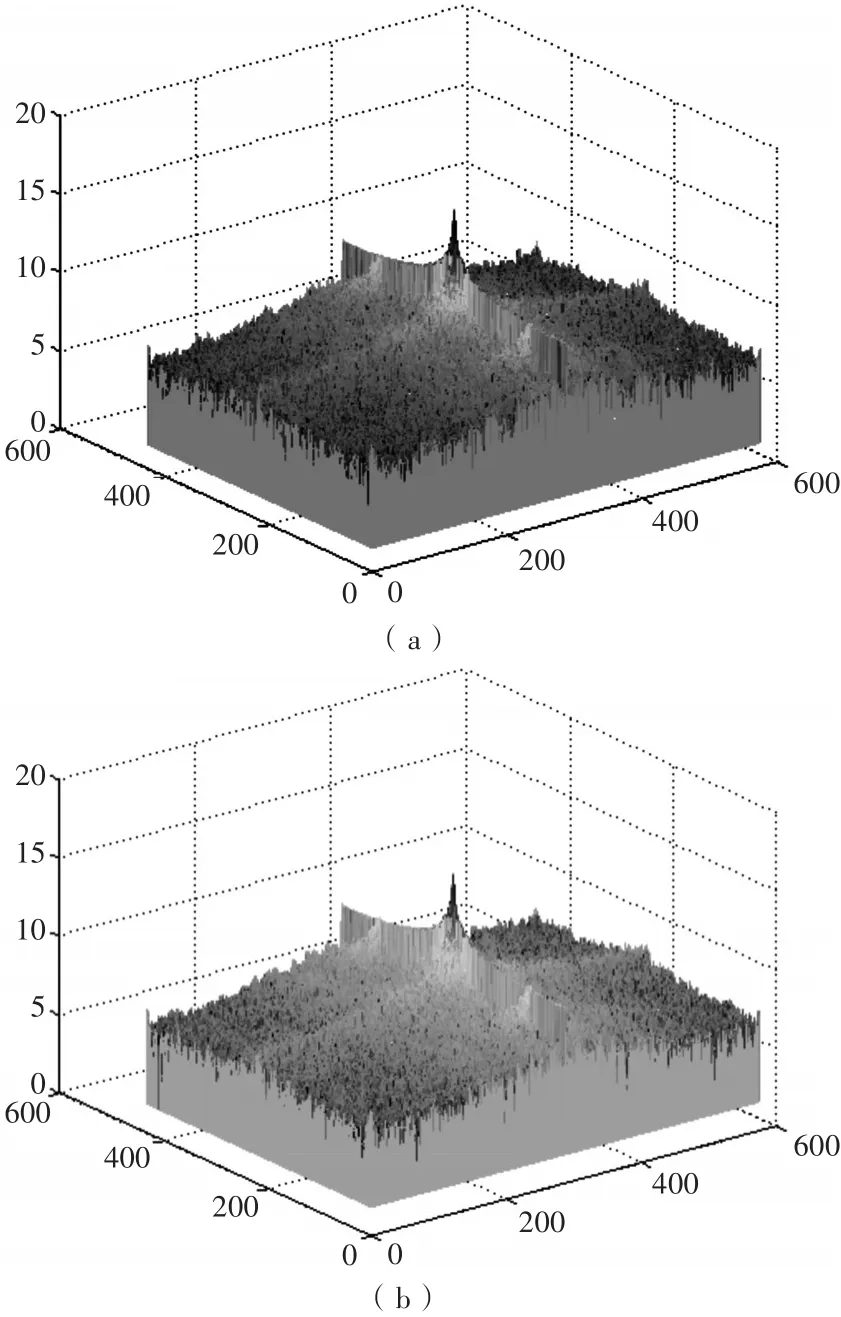
圖2 圖像傅立葉變換的互能量譜
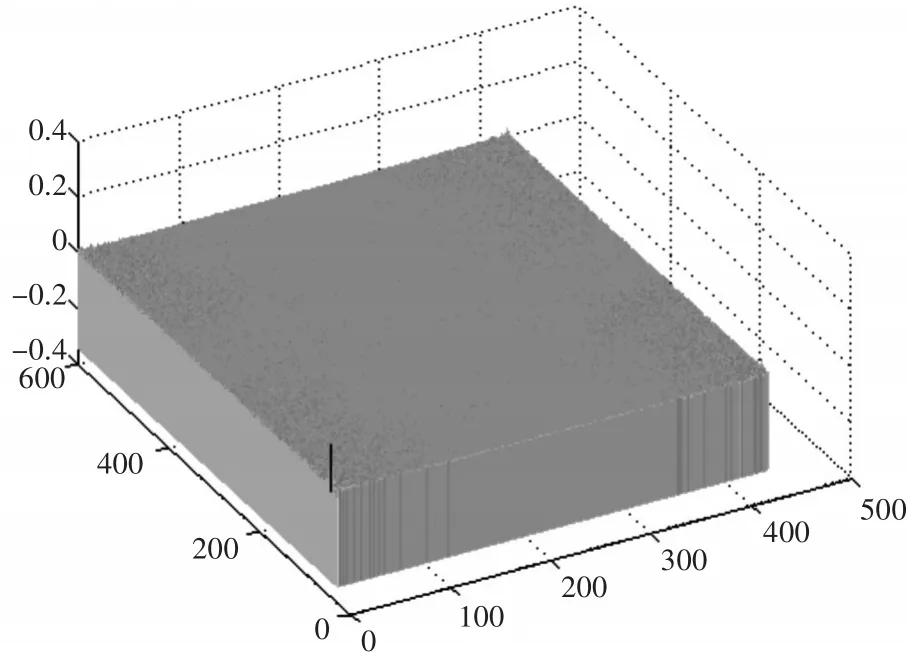
圖3 兩幀圖像的圖像的偏移量沖擊函數(shù)
4 結(jié)語(yǔ)
本文研究了一種灰度成像擴(kuò)展目標(biāo)配準(zhǔn)算法。針對(duì)運(yùn)動(dòng)背景下擴(kuò)展目標(biāo)的檢測(cè)中,運(yùn)動(dòng)目標(biāo)在圖像上造成的變化與背景自身的變化會(huì)造成混淆,使得運(yùn)動(dòng)目標(biāo)的檢測(cè)變得更加復(fù)雜這一問題。提出了基于傅立葉變換的灰度成像擴(kuò)展目標(biāo)跟蹤幀間圖像配準(zhǔn)方法。以幀間圖像的互能量譜關(guān)系函數(shù)為系統(tǒng)的目標(biāo)函數(shù),以偏移量沖擊函數(shù)為系統(tǒng)的偏移量配準(zhǔn)函數(shù)。試驗(yàn)結(jié)果表明,采用該算法,得出目標(biāo)圖與偏移圖水平向右移動(dòng)14個(gè)像素,垂直向上移動(dòng)1個(gè)像素。利用該參數(shù)將偏移圖平移(-14,-1)即可實(shí)現(xiàn)兩幀圖像的配準(zhǔn)。從而可以有效提高對(duì)灰度成像擴(kuò)展目標(biāo)跟蹤檢測(cè)的穩(wěn)定性。本文算法具有計(jì)算量小的特點(diǎn),可滿足擴(kuò)展目標(biāo)跟蹤中,圖像配準(zhǔn)的實(shí)時(shí)性要求。
[1]Stockman G.,Kopstein S.,Benett S.,Matching images to models for registration and object detection via clustering[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.1982,4(3):229-241.
[2]Gaurav Sharma;Frédéric Jurie;Cordelia Schmid,Ex?panded Parts Model for Semantic Description of Humans in Still Images[J].IEEE Transactions on Pattern Analysis and Machine Intelligence.2017,39(1):87-101.
[3]R.P.Wurtz,Object recognition robust under translations,deformations, and changes in background[J].IEEE Transactions on Pattern Analysis and Machine Intelli?gence.1997,19(7):769-775.
[4]Xinwu Liang;Hesheng Wang;Weidong Chen;Dejun Guo;Tao Liu,Adaptive Image-Based Trajectory Track?ing Control of Wheeled Mobile Robots With an Uncalibrat?ed Fixed Camera[J].IEEE Transactions on Control Sys?tems Technology,2015,23(6):2266-2282.
[5]Hanjiang Luo;Kaishun Wu;Zhongwen Guo;Lin Gu;Li?onel M.Ni,Ship Detection with Wireless Sensor Networks[J].IEEE Transactions on Parallel and Distributed Sys?tems,2012,23(7):1336-1343.
[6]R.M.O'Donnell;C.E.Muehe,Automated Tracking for Aircraft Surveillance Radar Systems[J].IEEE Transac?tions on Aerospace and Electronic Systems,1979,AES-15(4):508-517.
[7]李正周,王會(huì)改,劉梅,丁浩,金鋼,基于形態(tài)成分稀疏表示的紅外小弱目標(biāo)檢測(cè)[J],彈箭與制導(dǎo)學(xué)報(bào),2013,33(4):29-32,36.
[8]T.KAILATH.The Divergence ,Bhattacharyya Distance Measures in Signal Selection[J].IEEE Trans.Comm.Technology,1999,15(2):253-259.
[9]Barbara Zitová,Jan Flusser,Image registration methods:a survey[J].Image and Vision Computing,2003,21(11):977-1000.
[10] Kumaradevan Punithakumar; Pierre Boulanger; Mi?chelle Noga,A GPU-Accelerated Deformable Image Registration Algorithm With Applications to Right Ven?tricular Segmentation [J].IEEE Access,2017,5:20374-20382.
[11]Iman Aganj;Bruce Fischl,Multimodal Image Registra?tion Through Simultaneous Segmentation[J].IEEE Sig?nal Processing Letters,2017,24(11):1661-1665.
[12]Vijay Rengarajan;Ambasamudram Narayanan Rajagopa?lan;Rangarajan Aravind;Guna Seetharaman,Image Registration and Change Detection under Rolling Shutter Motion Blur[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2017,39(10):1959-1972.
[13]Wei Sun;Wiro J.Niessen;Stefan Klein,Randomly Per?turbed B-Splines for Nonrigid Image Registration[J].IEEE Transactions on Pattern Analysis and Machine In?telligence,2017,39(7):1401-1413.
[14]Abidi A.and Gonzalez R.C.,Data Fusion in Robotics and Machine Intelligence[M].New York:Academic Press.1992.
[15]Dasarathy B.V.,F(xiàn)usion strategies for enhancing decision reliability in multi-sensor environments[J].Optical En?gineering.1996,35(3).603-616.
[16]Li H.,Manjunath B.S.,Mitra S.K.,Multi-sensor image fusion using the wavelet transform[C]//IEEEInternation?al Conference on Image Processing.19941(11):51-55.
[17]Koren I.,Laine A.,Taylor F.,Image fusion using steer?able dyadic wavelet transform[C]//Proceedings of the In?ternational Conference on Image Processing.Washing?ton,DC,USA,1995:232-235.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
當(dāng)代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創(chuàng)新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學(xué)院學(xué)報(bào)(2016年4期)2016-12-01 03:54:07
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
