基于超聲傳感器網(wǎng)絡(luò)的定位系統(tǒng)設(shè)計(jì)
2018-03-31 12:22:42張燕沈洲
電腦知識(shí)與技術(shù) 2018年6期
張燕 沈洲

摘要:該文設(shè)計(jì)了一款可以在小范圍環(huán)境下,通過信標(biāo)進(jìn)行相對定位的系統(tǒng)。使用NRF24101搭建無線網(wǎng)絡(luò),實(shí)現(xiàn)未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)的數(shù)據(jù)通信;使用超聲傳感器獲取未知節(jié)點(diǎn)與信標(biāo)節(jié)點(diǎn)的距離。本論文使用TOA方式獲取距離信息,在獲取距離信息后,使用三點(diǎn)定位算法計(jì)算出未知節(jié)點(diǎn)的坐標(biāo)信息。通過實(shí)際運(yùn)行結(jié)果說明其正確性。
關(guān)鍵詞:無線傳感網(wǎng)絡(luò);TOA;定位系統(tǒng);NRF24L01
中圖分類號(hào):TP751.1 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1009-3044(2018)06-0029-04
1996年,美國加州大學(xué)洛杉磯分校大學(xué)提出“低功耗無線集成微傳感器”開創(chuàng)了現(xiàn)代無線傳感器網(wǎng)絡(luò)前奏。在這之后,無線傳感器網(wǎng)絡(luò)受到了來自社會(huì)各界的關(guān)注,成為在國家防御、目標(biāo)定位、環(huán)境監(jiān)測、智能交通、智能農(nóng)業(yè)、大型停車場管理和機(jī)場安檢等眾多領(lǐng)域中具有較強(qiáng)競爭力的應(yīng)用性技術(shù)之一。由于超聲室內(nèi)定位技術(shù)的應(yīng)用前景和工程需求,國內(nèi)外許多機(jī)構(gòu)都開展了這個(gè)方向的研究并取得了一定的成果。其中代表性的研究成果有:1)美國InterSense公司設(shè)計(jì)的Constel-lation系統(tǒng)。其發(fā)射器放在固定的位置上,定位目標(biāo)上有一個(gè)3D慣性傳感儀器和許多超聲接收器。發(fā)射器依次被相對應(yīng)的接收器的同步觸發(fā)信號(hào)激發(fā)出超聲脈沖信號(hào),接收器計(jì)算出脈沖的時(shí)間并轉(zhuǎn)換成距離信息。2)劍橋AT&T;實(shí)驗(yàn)室開發(fā)的ActiveBAT系統(tǒng)。它是采用超聲波傳輸?shù)膶?shí)踐延遲技術(shù)來定位的。3)MIT計(jì)算機(jī)科學(xué)和人工智能實(shí)驗(yàn)室研究的Cricket系統(tǒng)。它是由超聲發(fā)射器和定位目標(biāo)的嵌入接收器組成,通過三角測量計(jì)算來實(shí)現(xiàn)定位的。4)東京大學(xué)設(shè)計(jì)的Dolphin系統(tǒng)。它的原理和ActiveBat、Cricket是相似的。不同在于大范圍定位時(shí),Dolphin系統(tǒng)只要少量的超聲發(fā)射器和接收器,然后依據(jù)一種遞歸算法來實(shí)現(xiàn)依次定位,降低了構(gòu)造和操作的成本。5)英國劍橋大學(xué)通信工程實(shí)驗(yàn)室開發(fā)的寬帶超聲波定位系統(tǒng)。該系統(tǒng)提出一種利用寬帶傳感器的新型超聲定位系統(tǒng),具有寬頻通帶寬度。
本論文研究了基于無線網(wǎng)絡(luò)的超聲傳感器定位系統(tǒng)。
1系統(tǒng)組成和結(jié)構(gòu)
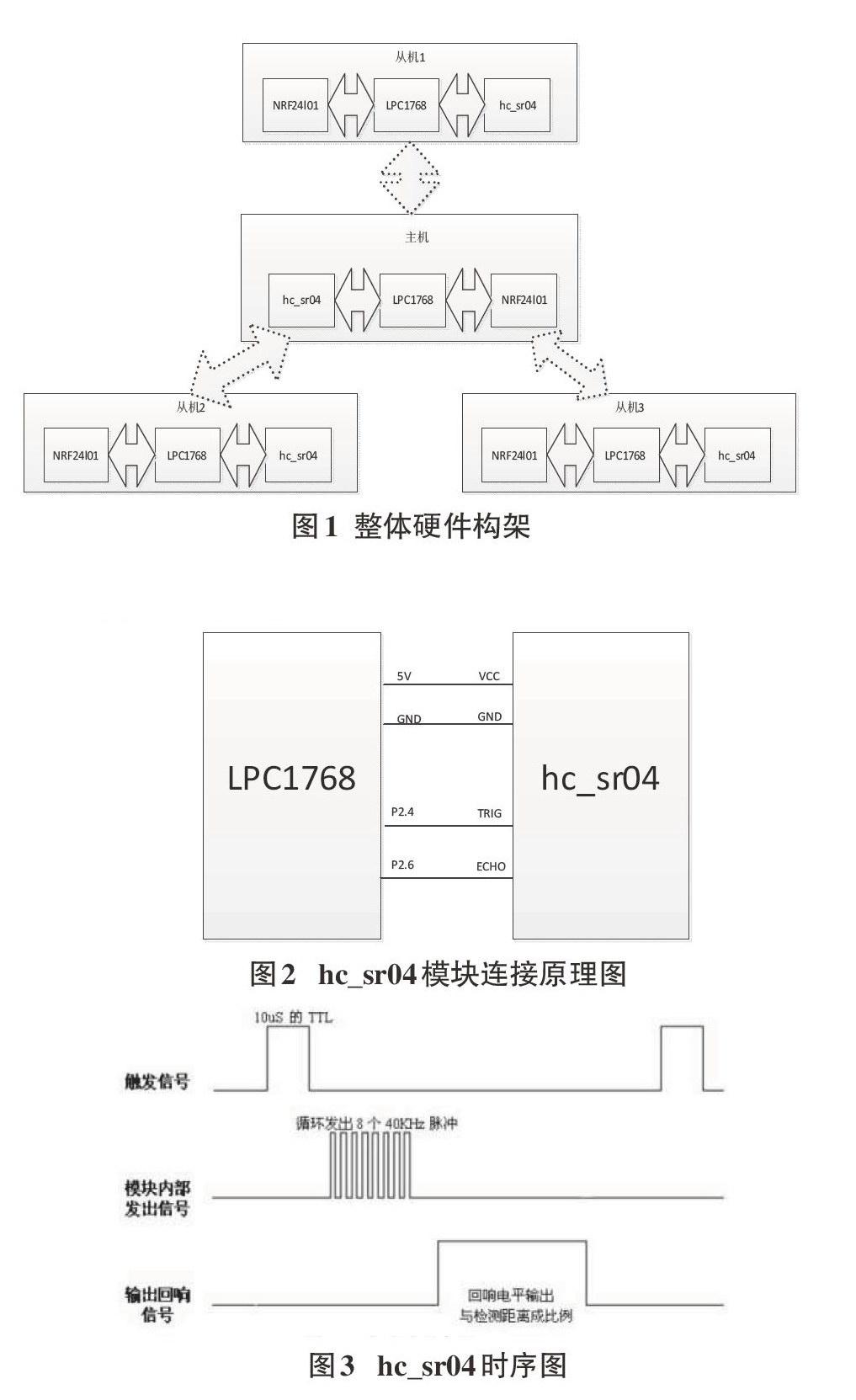
超聲傳感器網(wǎng)絡(luò)的定位系統(tǒng)整體硬件設(shè)計(jì)框架如圖1所示,分為主機(jī)和從機(jī)兩個(gè)部分,其中有1個(gè)主機(jī),3個(gè)從機(jī)。主機(jī)與從機(jī)之間通過無線網(wǎng)絡(luò)進(jìn)行通信。主機(jī)與從機(jī)都是由作為MCU的LPCI768、超聲模塊hc_sr04、和無線傳輸模塊NRF24101組成。其中無線傳輸模塊NRF24101是搭建主機(jī)與從機(jī)之間的無線網(wǎng)絡(luò),實(shí)現(xiàn)數(shù)據(jù)的傳輸;超聲模塊hc_sr04是通過超聲測距原理測量主機(jī)與從機(jī)之間的距離。由于主機(jī)、從機(jī)中都使用到超聲模塊和無線傳輸模塊,因此對此分別進(jìn)行介紹。
2 hc_sr04測量距離部分設(shè)計(jì)
hc_sr04一共有四個(gè)接口端。VCC接入5V電源,GND接地線,TRIG輸入觸發(fā)控制信號(hào),ECHO輸出回響信號(hào)。
由于hc_sr04的TRIG輸入端口和ECHO輸出端口傳輸?shù)亩际荰TL信號(hào),因此,hc_sr04與LPCI768之間通過10口就可以實(shí)現(xiàn)數(shù)據(jù)的通信。如圖2所示,可以設(shè)置LPC1768上的P2.4和P2.6端口分別為TIRG和ECHO的連接口。其中LPCI768的P2.4端口輸出TRIG觸發(fā)信號(hào),連接he_st04的TRIG輸入端口;LPCI768的P2.6端口輸入ECHO回響信號(hào),連接hc_sr04的輸出端口。函數(shù)hc_sr04_init()實(shí)現(xiàn)對這兩個(gè)IO口的初始化。
圖3為超聲模塊的時(shí)序圖。從圖中可以看出當(dāng)觸發(fā)端TIRG發(fā)出一個(gè)10us的TTL高電平時(shí),模塊的內(nèi)部會(huì)自動(dòng)發(fā)送一個(gè)8個(gè)40Khz的超聲脈沖并檢測回響信號(hào)。一旦檢測到回響信號(hào),ECHO將輸出回響信號(hào),回響信號(hào)電平輸出的寬度與檢測距離成正比,且高電平持續(xù)時(shí)間就為超聲信號(hào)發(fā)送到接收的時(shí)間。因?yàn)楸菊n題所應(yīng)用的是兩個(gè)超聲模塊進(jìn)行一個(gè)發(fā)送,一個(gè)接收的功能,所以測量的距離=時(shí)間*聲速。
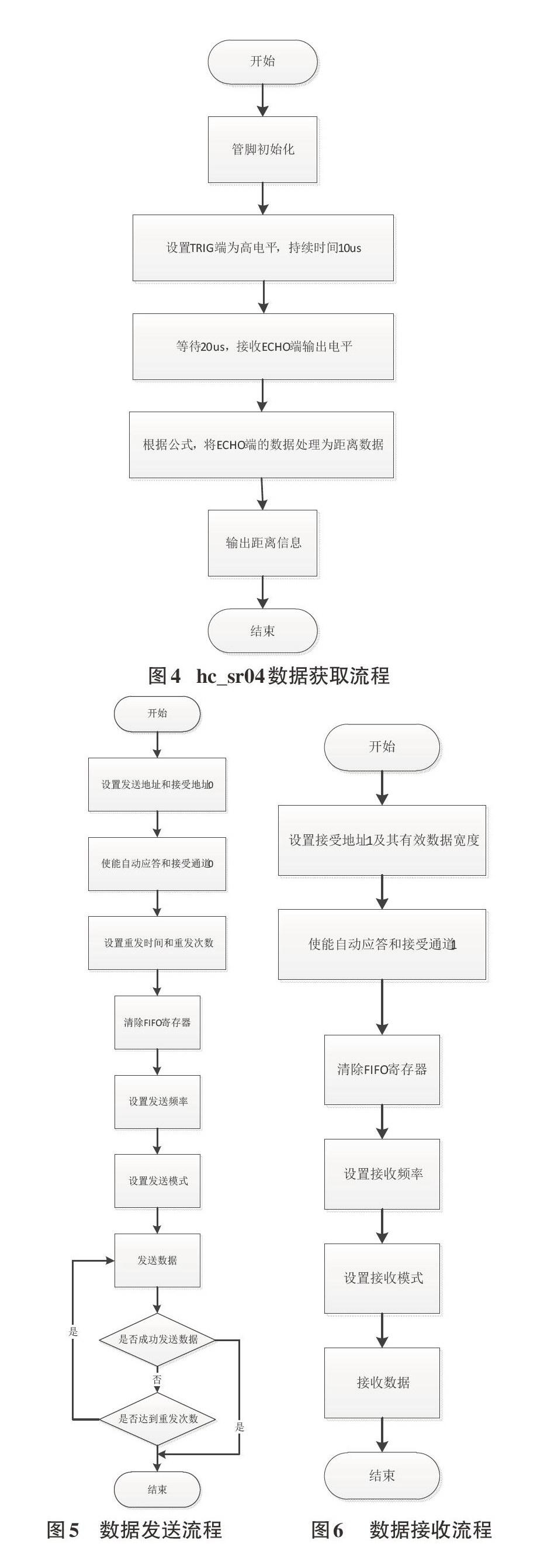
圖4是hc_sr04數(shù)據(jù)獲取的流程圖。程序開始后,首先對所用到的LPC1768的管腳進(jìn)行初始化,然后給TRIG端一個(gè)持續(xù)10us的高電平,因?yàn)槁曇舻乃俣燃s為340m/s,當(dāng)測量距離為6m時(shí)(本設(shè)計(jì)采用兩個(gè)超聲模塊進(jìn)行一個(gè)發(fā)超聲信號(hào),一個(gè)接收超聲信號(hào)進(jìn)行測距的,單個(gè)模塊的測量距離為3m,理論上的測量距離可以達(dá)到6m),聲波往返的時(shí)間約為6m/(340m/s)=20us,所以等待20us后,ECHO端接收數(shù)據(jù)。此時(shí)所接收的數(shù)據(jù)為超聲波從發(fā)送到接收到回響信號(hào)的時(shí)間。因此,此時(shí)速測的距離=時(shí)間*聲速。
3 NRF24101無線網(wǎng)絡(luò)搭建部分設(shè)計(jì)
本文所設(shè)計(jì)的超聲定位系統(tǒng)是基于無線網(wǎng)絡(luò)進(jìn)行數(shù)據(jù)傳輸?shù)模虼藢?shí)現(xiàn)無線模塊NRF24101的發(fā)送、接收設(shè)置,并搭建無線網(wǎng)絡(luò)是實(shí)現(xiàn)超聲傳感器網(wǎng)絡(luò)定位的基礎(chǔ)。
3.1 NRF24101的發(fā)送與接收設(shè)置
在無線傳輸進(jìn)行前,要先對NRF24101所使用到的管腳進(jìn)行初始化。初始化后,LPC1768可以使用SPI協(xié)議對NRF24101的寄存器進(jìn)行讀寫操作。此時(shí)可以設(shè)置相應(yīng)的寄存器完成無線傳輸?shù)陌l(fā)送和接受。
圖5是發(fā)送部分的流程圖。程序開始后,先設(shè)置發(fā)送地址和接收地址0,這兩個(gè)地址必須為同一地址,并設(shè)置發(fā)送數(shù)據(jù)的寬度。然后使能自動(dòng)應(yīng)答模式并使能接收通道0,之后設(shè)置重發(fā)時(shí)間和重發(fā)次數(shù),其次清除FIFO,為發(fā)送數(shù)據(jù)清理出空間。然后設(shè)置發(fā)送頻率,這是十分重要的一步,最后通信的實(shí)現(xiàn)不僅僅要發(fā)送地址接收地址相同,還要發(fā)送頻率和接收頻率相同才行。最后將NRF24101模塊設(shè)置為發(fā)送模式,就可以發(fā)送數(shù)據(jù),當(dāng)發(fā)送數(shù)據(jù)成功或達(dá)到最大重發(fā)次數(shù)時(shí),結(jié)束流程。
圖6為接收部分的流程圖。程序開始后,先設(shè)置接收地址1,其地址應(yīng)為發(fā)送部分的發(fā)送地址,并設(shè)置接收數(shù)據(jù)的寬度。然后使能自動(dòng)應(yīng)答模式并使能接收通道1,之后設(shè)置重發(fā)時(shí)間和重發(fā)次數(shù),其次清除FIFO,為接收數(shù)據(jù)清理出空間。然后設(shè)置接收頻率與地址相同,這的接收頻率應(yīng)與發(fā)送部分的發(fā)送頻率相同。最后,將NRF24101模塊設(shè)置為接收模式,就可以接收數(shù)據(jù),完成整個(gè)流程。
3.2無線網(wǎng)絡(luò)的搭建
本文中所搭建的無線數(shù)據(jù)傳輸網(wǎng)絡(luò),從機(jī)的地址是相同的,是通過改變不同的射頻發(fā)射接收頻率來區(qū)分各個(gè)從機(jī),實(shí)現(xiàn)主機(jī)與各從機(jī)之間的數(shù)據(jù)通信的。如圖7所示,主機(jī)的發(fā)送地址為ADD1,接收地址為ADD2;三個(gè)從機(jī)的發(fā)送地址都為ADD2,接收地址為ADD1。但它們主機(jī)與各個(gè)從機(jī)發(fā)送頻率是不同的:主機(jī)與向從機(jī)1發(fā)送數(shù)據(jù)時(shí)的通信頻率為2.432Ghz;主機(jī)與向從機(jī)2發(fā)送數(shù)據(jù)時(shí)的通信頻率為2.448hz;主機(jī)與向從機(jī)3發(fā)送數(shù)據(jù)時(shí)的通信頻率為2.464Ghz。而3個(gè)從機(jī)向主機(jī)發(fā)送數(shù)據(jù)時(shí),使用的是同一頻率為2.416Ghz。這種現(xiàn)象是因?yàn)閺臋C(jī)作為接收端時(shí),主機(jī)向從機(jī)發(fā)送數(shù)據(jù),此時(shí)的從機(jī)地址都是相同的,只能通過不同的通信頻率來區(qū)分從機(jī);但從機(jī)向主機(jī)發(fā)送數(shù)據(jù)時(shí),是在接收到主機(jī)向從機(jī)發(fā)送的數(shù)據(jù)后才開始進(jìn)行的,這時(shí)只有一個(gè)從機(jī)作為發(fā)送端,主機(jī)作為接收端,因此所有的從機(jī)都可以使用這一相同的頻率向主機(jī)發(fā)送數(shù)據(jù)。
圖8所示流程圖為主機(jī)的流程圖,程序在開始后首先進(jìn)行初始化,使各模塊能正常的使用。然后主機(jī)依次向從機(jī)發(fā)送定位信息,接收回傳數(shù)據(jù)并檢查數(shù)據(jù)是否準(zhǔn)確。之后主主機(jī)獲取光強(qiáng)數(shù)據(jù)。獲得所有數(shù)據(jù)后,主機(jī)對超聲數(shù)據(jù)運(yùn)用三點(diǎn)定位算法進(jìn)行處理,獲得位置節(jié)點(diǎn)的坐標(biāo)信息;對光強(qiáng)數(shù)據(jù)進(jìn)行對比分析,得出光信標(biāo)的相對方向。最后將處理完的數(shù)據(jù)發(fā)送至PC端,完成一次循環(huán)。
圖9所示的流程圖為從機(jī)程序的流程。程序開始后,首先進(jìn)行初始化,隨機(jī)程序進(jìn)人接收數(shù)據(jù)模式,當(dāng)接收到主機(jī)的定位數(shù)據(jù)時(shí),從機(jī)發(fā)送相應(yīng)的數(shù)據(jù)到主機(jī),完成一次循環(huán)。
4 TOA與定位算法
本文采用TOA獲取距離信息。當(dāng)需要獲取未知節(jié)點(diǎn)的位置信息時(shí),未知節(jié)點(diǎn)通過無線信道向信標(biāo)節(jié)點(diǎn)發(fā)送定位信號(hào),同時(shí)通過超聲模塊向信標(biāo)節(jié)點(diǎn)發(fā)送超聲定位信號(hào)。由于超聲波的傳輸速度遠(yuǎn)低于無線傳輸速度,所以無線電定位信號(hào)將先到達(dá)信標(biāo)節(jié)點(diǎn)。一旦信標(biāo)節(jié)點(diǎn)接收到無線定位信號(hào),立即啟動(dòng)定時(shí)器,并在隨后接收到超聲波定位信號(hào)時(shí)停止定時(shí)器。這樣就能獲得無線信號(hào)和超聲信號(hào)到達(dá)信標(biāo)節(jié)點(diǎn)的時(shí)間差。在測量距離短的環(huán)境中,無線信號(hào)的傳輸速度非常快,遠(yuǎn)遠(yuǎn)高于超聲波信號(hào)的速度,無線信號(hào)的傳輸時(shí)間可以忽略不計(jì)。這通常需要從未知節(jié)點(diǎn)到信標(biāo)節(jié)點(diǎn)的時(shí)間。并通過無線通道將時(shí)間傳回未知節(jié)點(diǎn)。其過程如圖10所示。
