步進伺服電機綜合實訓裝置
2018-04-02 07:17:10覃貴禮黃月英
裝備制造技術 2018年1期
覃貴禮,黃月英
(廣西職業技術學院,廣西 南寧530226)
1 步進伺服電機綜合實訓裝置設計要求
(1)該步進伺服電機實訓裝置集電氣控制、PLC、步進、伺服、變頻、傳感和組態等為一體的綜合實訓裝置[1]。
(2)學生可根據實訓任務要求,自行完成系統方案設計、接線、編程和整體調試的過程,全面掌握機電一體化技術綜合實訓。
(3)該實訓裝置要以機電類相關專業核心課程相對接,可單獨或者綜合實訓。
(4)該實訓裝置除可完成學生相關實訓外,同時可為教師科研提供開發平臺。
2 步進伺服電機綜合實訓裝置結構說明
實訓裝置是在鋁合金底板上裝有輸送裝置、加工裝置和輔助控制裝置。輸送裝置、加工裝置通過電纜和氣源管與輔助控制裝置連接。輸送裝置包含電機、皮帶、推料氣缸、夾料氣缸、工作臺及檢測傳感器。加工裝置包含立柱、搖臂、主軸箱、主軸、位置檢測傳感器、加工機器固定槽。輔助控制裝置包含指示燈組、按鈕、變頻器、交流伺服驅動器、步進電機驅動器、電源組、氣缸組、電磁閥組、PLC控制器。本實用新型裝置將機電類專業學生所學的電機、控制、氣動、檢測等知識有機融合;實訓裝置為開放式,實訓內容豐富,根據教學實訓要求,學生可以按自己的思路安裝、接線、調整、調試完成實訓任務,實訓裝置如圖1和圖2所示。
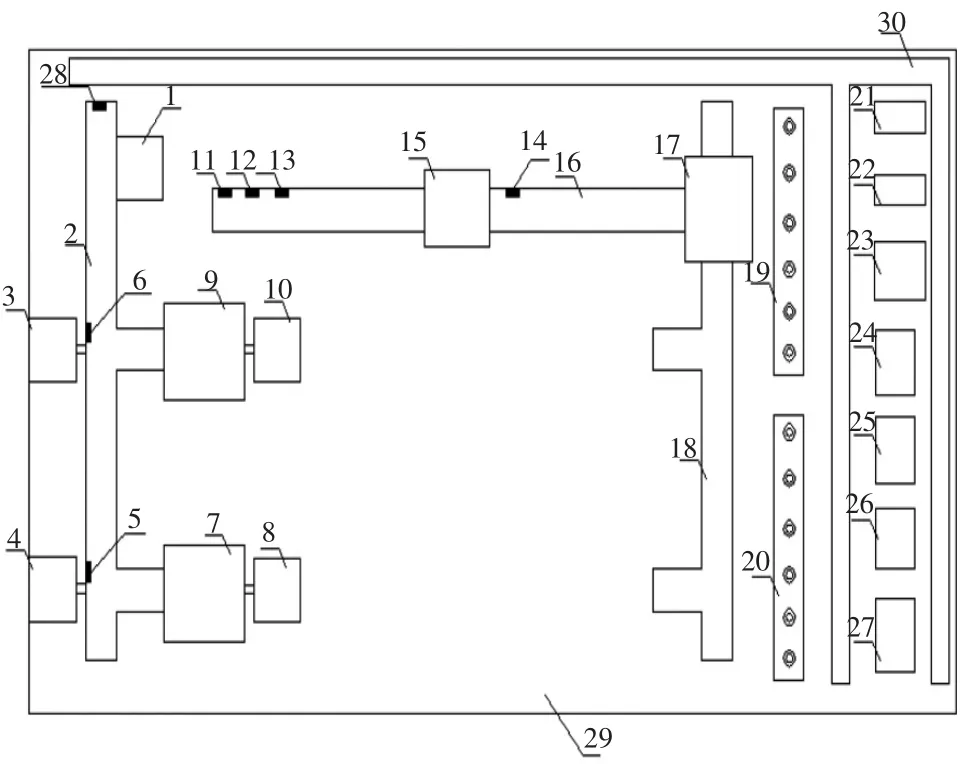
圖1 實訓裝置平面布置圖
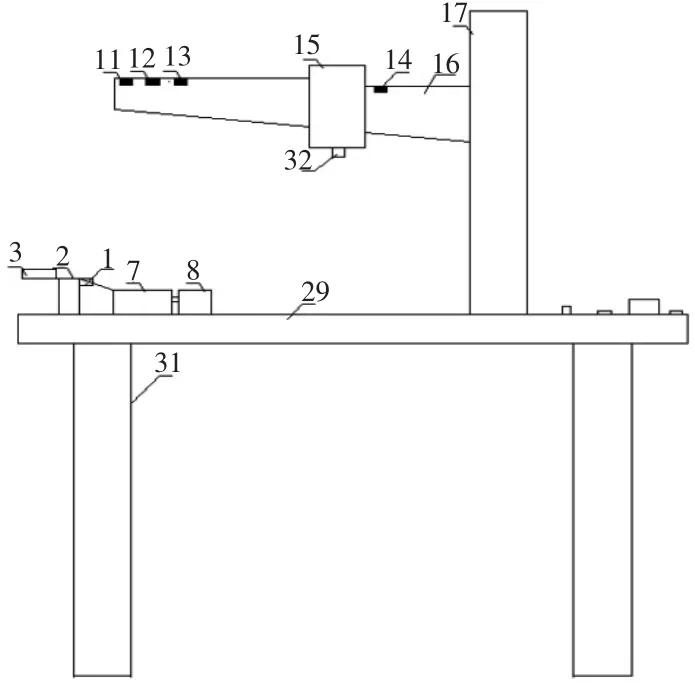
圖2 實訓裝置立面圖
1為直流電機、2為皮帶、3為推白色料氣缸、4為推黑色料氣缸、5為黑色料檢測傳感器、6為白色料檢測傳感器、7為黑色工件加工工作臺、8為夾緊黑色工件氣缸、9為白色工件加工工作臺、10為夾緊白色工件氣缸,11-14為位置檢測傳感器、15為主軸箱、16為搖臂、17為立柱、18為機器固定槽、19為指示燈組、20為按鈕、21為變頻器、22為交流伺服驅動器、23為步進電機驅動器、24為電源組、25為氣缸組、26為電磁閥組、27為PLC控制器、28為工件檢測傳感器、29為匯線槽、30為鋁合金底座、31為支架立柱、32為主軸。
所述步進伺服電機綜合實訓裝置,在鋁合金底板上安裝有輸送裝置、加工裝置和輔助控制裝置。輸送裝置、加工裝置通過電纜和氣源管與輔助控制裝置連接。
(5)從工藝上講,對小于0.045 mm細泥在底流中的混雜率要求并不很嚴格,本次試驗為21.27%,水力分級效率=粗粒正配率-細泥混雜率=77.56%,此值符合現實情況。
所述的步進伺服電機綜合實訓裝置,輸送裝置包含工件檢測傳感器28、直流電機1、皮帶2、推白色料氣缸3、推黑色料氣缸4、黑色料檢測傳感器5、白色料檢測傳感器6、黑色工件加工工作臺7、夾緊黑色工件氣缸8、白色工件加工工作臺9、夾緊白色工件氣缸10,電機 1、檢測傳感器 5、6、28 通過電纜,氣缸 3、4、8、10通過電纜和氣源管與輔助控制裝置連接。
所述的步進伺服電機綜合實訓裝置,加工裝置包含立柱17、搖臂16、主軸箱15、主軸32、位置檢測傳感器11-14、機器固定槽18.搖臂16上下控制采用伺服電動機拖動,搖臂16左右控制采用步進電動機拖動,主軸箱15移動控制由交流電動機采用變頻器拖動,主軸32動作由直流電動機控制。搖臂16、主軸箱15、主軸32、位置檢測傳感器11-14通過電纜與輔助控制裝置連接。
所述的步進伺服電機綜合實訓裝置,輔助控制裝置包含指示燈組19、按鈕20、變頻器21、交流伺服驅動器22、步進電機驅動器23、電源組24、氣缸組25、電磁閥組26和PLC控制器27.
所述的步進伺服電機綜合實訓裝置可進行多種實訓的組合。
(1)直線定位控制系統:通過PLC控制器、交流伺服電機、主軸箱、主軸、位置檢測傳感器組合,控制主軸箱精確達到搖臂指定位置。
(2)角度定位控制系統:通過PLC控制器、步進電機、立柱、搖臂、主軸箱、主軸、位置檢測傳感器組合,控制主軸箱旋轉一定角度精確到指定位置。
(3)電機變頻控制系統:通過PLC控制器、直流電機、變頻器、皮帶、工件組合,實現工件按一定速度在皮帶運輸控制實訓。
(4)物體輸送裝置控制系統:通過PLC控制器、直流電機、皮帶、推白色料氣缸、推黑色料氣缸、黑色料檢測傳感器、白色料檢測傳感器、黑色工件加工工作臺、夾緊黑色工件氣缸、白色工件加工工作臺、夾緊白色工件氣缸組合,實現PLC對輸送工件裝置控制實訓。
(5)氣源管路安裝系統:將推白色料氣缸、推黑色料氣缸、夾緊黑色工件氣缸、夾緊白色工件氣缸通過氣源管,經匯線槽與電磁閥組連接;電磁閥組氣源與供氣裝置連接,實現氣源管路安裝實訓。
(6)電氣線路安裝系統:將電機、檢測傳感器、電磁閥組、指示燈組、按鈕、變頻器、步進電機、交流伺服電機的電源線、信號線通過匯線槽連接到PLC控制器及電源組,實現電氣線路安裝實訓。
(7)氣動部件拆裝:通過對推白色料氣缸、推黑色料氣缸、夾緊白色工件氣缸、夾緊黑色工件氣缸的拆卸和安裝,實現對氣動部件拆裝實訓。
3 步進伺服電機綜合實訓裝置應用意義
隨著中國經濟的迅速發展,產業升級,智能化產業應運而生,機器人的使用將大量普及,并逐步取代人工崗位[2]。企業自動化生產線上的機器人控制中精確定位將大量使用到步進電機,伺服電機,PLC控制器及變頻器,而機器人的使用也必將需要大量的工程技術人員進行開發,維護維修[3]。培養智能化技術人員,服務于企業是高職院校的主要職責,步進伺服電機綜合實訓裝置的開發應用對于培養高職學生掌握機器人相關知識具有重要的應用意義,具體如下:
(1)本實訓裝置由專業教師與企業從事機電一體化的技術人員共同研制,根據企業實際使用零件加工設備提煉濃縮,依據教學理論及手段,綜合企業實際實用案例,將兩者有機結合而成。
(2)步進伺服電機綜合實訓裝置,將機電類學生所學的電機、控制、氣動、檢測等知識有機融合,整個實訓裝置為開放式,實訓內容豐富,學生可以按自己的思路安裝、接線、調整、調試完成工作,增強鍛煉學生實際動手能力和編程能力。
(3)綜合實訓裝置在提高學生動手能力的同時,也提高了教師整合能力。
(4)為相關課程開展線上線下混合式教學提供實訓平臺,可極大的擴展實訓內容。
(5)實訓裝置為教師提供科研平臺,可利用相關設備開展科學技術研究,實現服務于企業技術改革創新。
4 結束語
本實訓裝置為學生提供了豐富的創新性實驗,通過直流電機、步進、伺服、變頻和組態等課程實訓,可將相關課程進行相互融合、相互滲透,全面提升高職院校機電類專業學生綜合設計分析能力,以及解決問題的實際能力。該實訓裝置已經應用于我系學生的相關課程實訓當中,在實際應用中取得了良好的效果,極大推動了系部相關課程的改革工作。
參考文獻:
[1]劉遙生,林 玲,潘 鋒.多軸運動控制技術實驗平臺的設計[J].深圳職業技術學院學報,2007(4):197-199.
[2]趙光偉,張 帆,楊松立,等.步進電動機速度控制系統的設計[J].科技視界,2014(9):53-54.
[3]李金城,付明忠.三菱FX系列PLC定位控制應用技術[M].北京:人民交通出版社,2007.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
裝備制造技術(2020年12期)2020-05-22 09:25:38
福建教育學院學報(2019年4期)2019-06-12 08:39:10
計算機測量與控制(2017年6期)2017-07-01 16:23:53
電子制作(2017年8期)2017-06-05 09:36:15
海峽科技與產業(2016年3期)2016-05-17 04:32:12
