基于改進人工勢場法的飛行器軌跡規劃
2018-04-02 02:04:58范世鵬劉運鵬
航天控制 2018年1期
關鍵詞:規劃
范世鵬 吳 廣 王 亮 劉運鵬 李 伶 祁 琪
北京航天自動研究所,北京100854
為解決機器人的路徑規劃問題,斯坦福大學Khatib教授于1986年提出并首次應用一種虛擬勢場的方法——人工勢場法(artificial potential field method)[1]。該方法提出了引力場和斥力場的概念,通過為障礙物、目標點等人工構造勢場,搜索勢函數的負梯度方向,引導運動體規避威脅區,最終到達目標點,使其勢能最小化。該方法具有數學描述清晰,計算量小,實時性強,規劃速度快等優點。
隨后,該方法在機器人、機械臂和無人機等路徑規劃問題上得到了廣泛應用[2-8]。Jurgen將運動體視為點電荷,通過在等效放置點電荷形成斥力電勢場,使運動體在電場力的作用下規避禁飛區,并運用滑模控制方法,使其跟蹤負梯度方向飛行,最終到達目標點處[2];采用人工勢場法規劃出的軌跡特性完全取決于勢函數的表達形式,因此勢函數的選取是該方法的關鍵。Jing Ren針對任意形狀威脅區,介紹了一種顯式勢場函數的建立方法,通過調整單參數γ即可實現梯度的變化[3];在評估防空威脅方面,人工勢場法行之有效,因此往往可得到可行解[7]。然而,在復雜環境下,人工勢場法常常出現局部極小問題,可能使該方法產生早熟現象,運動體困于陷阱而無法到達目標,如圖1所示。
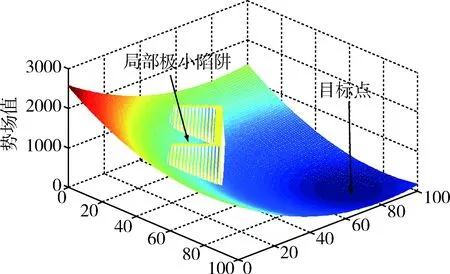
圖1 人工勢場法的局部極小問題
目前,解決局部極小問題的有效途徑主要分為2類: 1)利用某種手段預先消除局部極小點; 2)陷入局部極小區域后以算法“跳出”此區域。第1類方法構造特殊的勢函數,保證目標點為唯一的極小值點,或盡可能地減少局部極小點的數目,這就需要對全局環境進行預處理,計算量很大,因而通常為離線應用,無法滿足實時性和應對突發威脅(pop-up threat)的要求;第2類方法一般是在每次運動體陷入局部極小點后,運用諸如最佳優先、模擬退火、隨機搜索等搜索策略,尋找勢場值比當前局部極小點更低逃離點,然后繼續沿勢場負梯度方法運動直到到達目標點。
本文利用改進的人工勢場法,對飛行器在線軌跡規劃問題進行了研究。考慮飛行器的過載約束條件,使得到的標稱軌跡滿足適飛條件,并根據當前狀態動態調整參數,改變人工勢場的作用區域,從而克服人工勢場法容易陷入局部極小的固有缺陷。
1 基本原理
不失一般性,運動體的動能是廣義速度的二次形式:
(1)
其中,m為廣義質量矩陣。設勢能為U(x),則飛行器的機械能為:

(2)
由拉格朗日原理,可知運動學方程滿足:
(3)
其中,F為重力以外的合作用力。運動學方程可以寫為以下形式:

(4)
其中,C為向心力和科里奧利力的合力;G為重力。
人工勢場法是通過構造虛擬的人工勢場,將目標點設置為勢場全局最小,以虛擬引力場將飛行器吸引到目標點處,而使用禁飛區對應的虛擬斥力場,在合力的作用下,使飛行器規避障礙物和威脅區,最終使其勢函數最小化。合力F是總勢場U的負梯度矢量,即:
F(x,y,z)=-▽U(x,y,z)
(5)
總勢能滿足疊加原理,對于N個待建模的環節,總勢能可表示為:
(6)
通過人為構造的勢場,使虛擬運動體在相應的力場作用下運動,所經過的軌跡具有連續可微的特性,可作為待飛行器跟蹤的標稱軌跡。
2 人工勢場法
為簡化問題,這里不考慮虛擬運動體的動力學特性,則描述虛擬運動體的側向運動學方程為:
(7)
其中,V為運動體速度;ψ為航向角;az為運動體在總勢場中對應的法向過載。
軌跡規劃是尋找一條標稱軌跡,在到達目標點位置的同時,滿足控制輸入有限的約束,保證軌跡連續可微。為保證運動體軌跡在任意一點處的曲率是在飛行器的機動能力范圍之內,運動體航向角速率不超過飛行器的最大機動角速率,即航向角速率具有飽和特性:
(8)

設運動體速度保持不變,將人工勢場所產生的合力在速度的法向上投影,由法向過載改變軌跡的航向角。目標點和禁飛區的人工勢場分別表現為對運動體的吸引和排斥作用。圖2給出了典型的目標點和禁飛區勢場的示意圖。
人工勢場法的重點在于勢函數的設計。首先,勢函數必須滿足二階連續可微的基本要求,在空間中任意一點處的作用力是連續可微的,這樣就可以保證軌跡的光滑。其次,勢函數對軌跡的最優性影響很大。當排斥力系數設置過小或吸引力系數設置過大時,傳統人工勢場法得到的軌跡無法規避禁飛區;若排斥力系數設置過大,或吸引力系數設置過小,則會導致軌跡存在不必要的彎曲。為此,本文根據運動體到禁飛區的距離和禁飛區半徑,動態調整吸引力(排斥力)系數,并設定排斥力有限的作用區域。同時,在禁飛區附近設置零引力環狀區域,有利于規避禁飛區,則構造目標點形成的引力勢函數為:
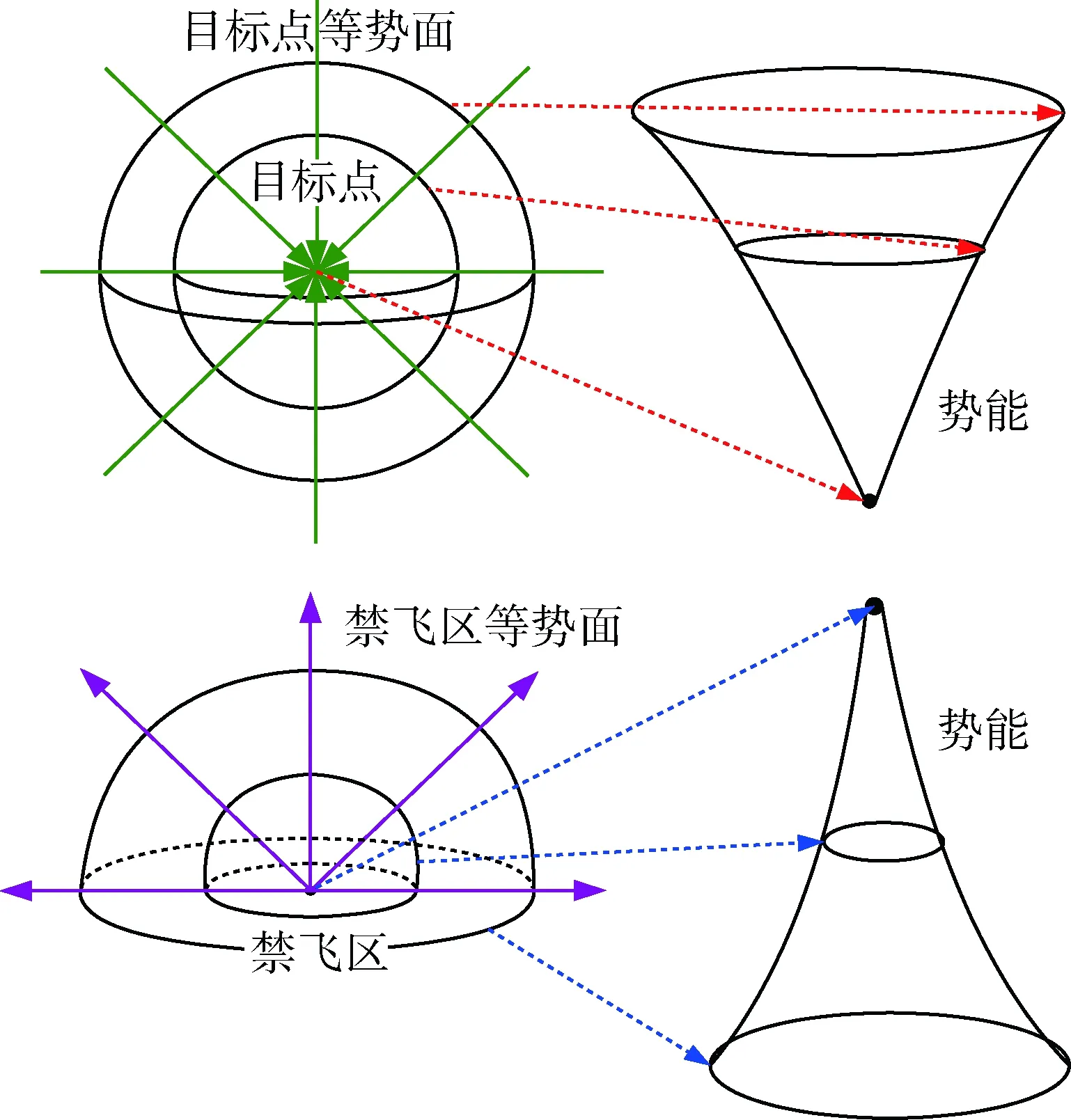
圖2 典型的人工引力場與斥力場
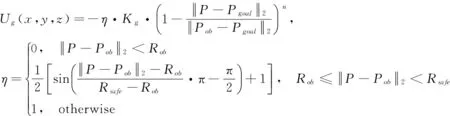
(9)
其中,n為正整數;η為動態的吸引力系數,反映了飛行器到達目標點的強烈程度;Rob為禁飛區半徑;P為當前位置;Pob為禁飛區中心位置;Pgoal為目標點位置;Rsafe為環狀區域的寬度(如圖3所示)。
同理,減小排斥的作用區域,可減少軌跡不必要的機動。當運動體縱向位置與障礙物中心齊平時,將該位置定義為跨越點。設d0為跨越點到障礙物中心的距離,本文采取勢場平滑過渡的策略,禁飛區再跨越點之后形成的斥力勢函數為:
(10)
其中,q為正整數;λ為動態的排斥力系數,反映了飛行器規避禁飛區的迫切程度;d1為環狀區域的外徑(如圖3所示)。
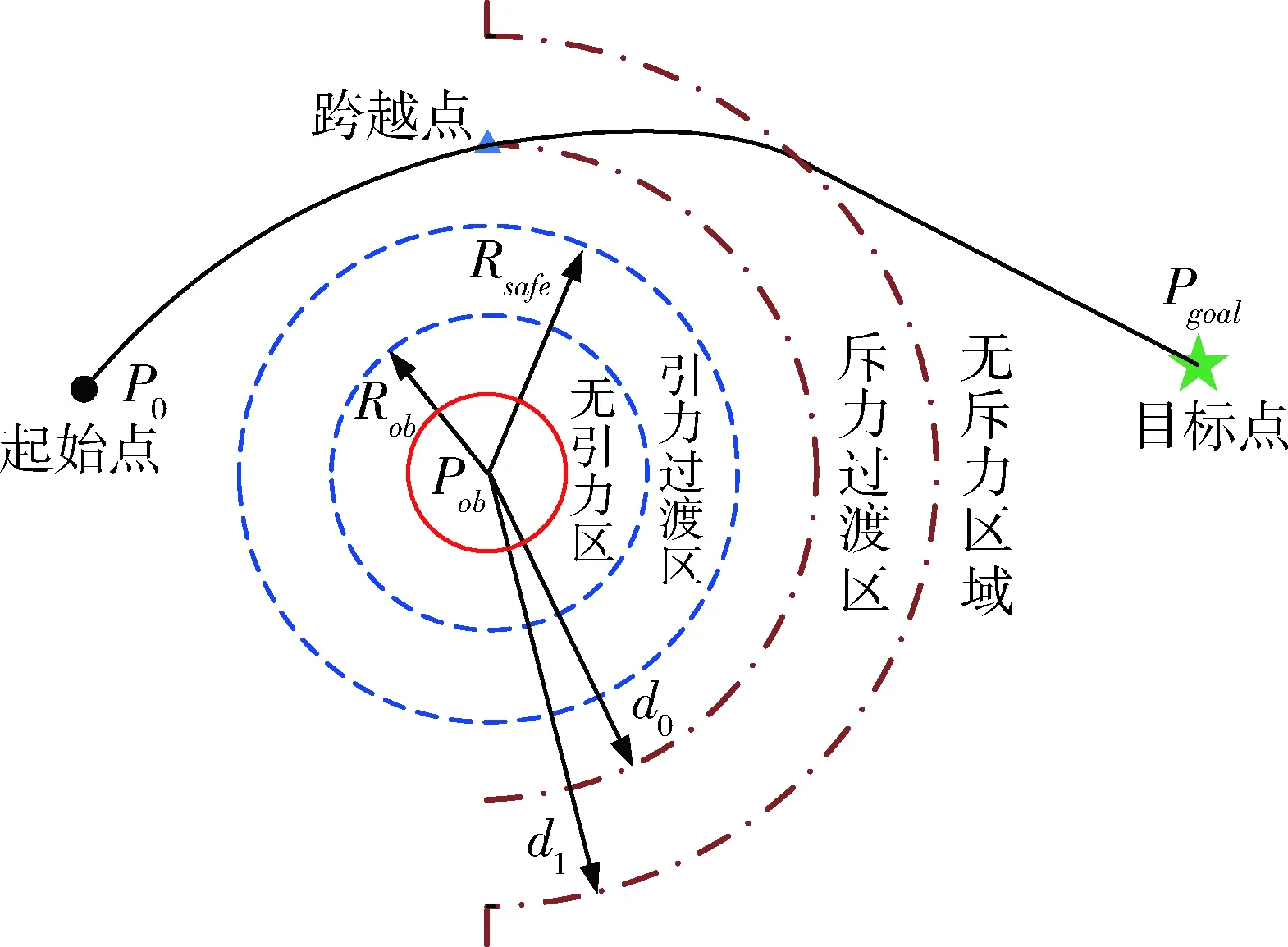
圖3 力場作用區域示意圖
根據疊加原理(superposition principle),將目標點和M個禁飛區所形成的空間約束統一到勢力場,總勢場函數為:
(11)
根據式(5),可得到運動體所受的合力,將合力投影到速度的法向,由法向過載生成航向角速率從而改變速度方向,而不改變速度大小。即僅對航向角進行實時更新,達到改變運動方向、實現規避禁飛區的效果。通過求解模型(7),即可得到可行的標稱軌跡。
為了評估軌跡的優劣,選取的性能指標首先考慮軌跡是否完成避障。在成功避障的前提下,應減少不必要的機動飛行。性能指標函數的具體形式為:

其中,w1,w2為權重系數。
為改善軌跡的性能,本文采取區間對分法,對所涉及的參數進行調整,使上述指標函數足夠小。
3 仿真驗證
假設單位質量的虛擬運動體速度為1,禁飛區
中心位置(160,0)及半徑(R=20)給定,目標點坐標為(300,0),航向角速率不大于5(°)/s。合理選擇增益Kg和Kob,在3種不同的航向角初值條件下,傳統人工勢場法得到飛行器平面內的標稱軌跡如圖4所示。
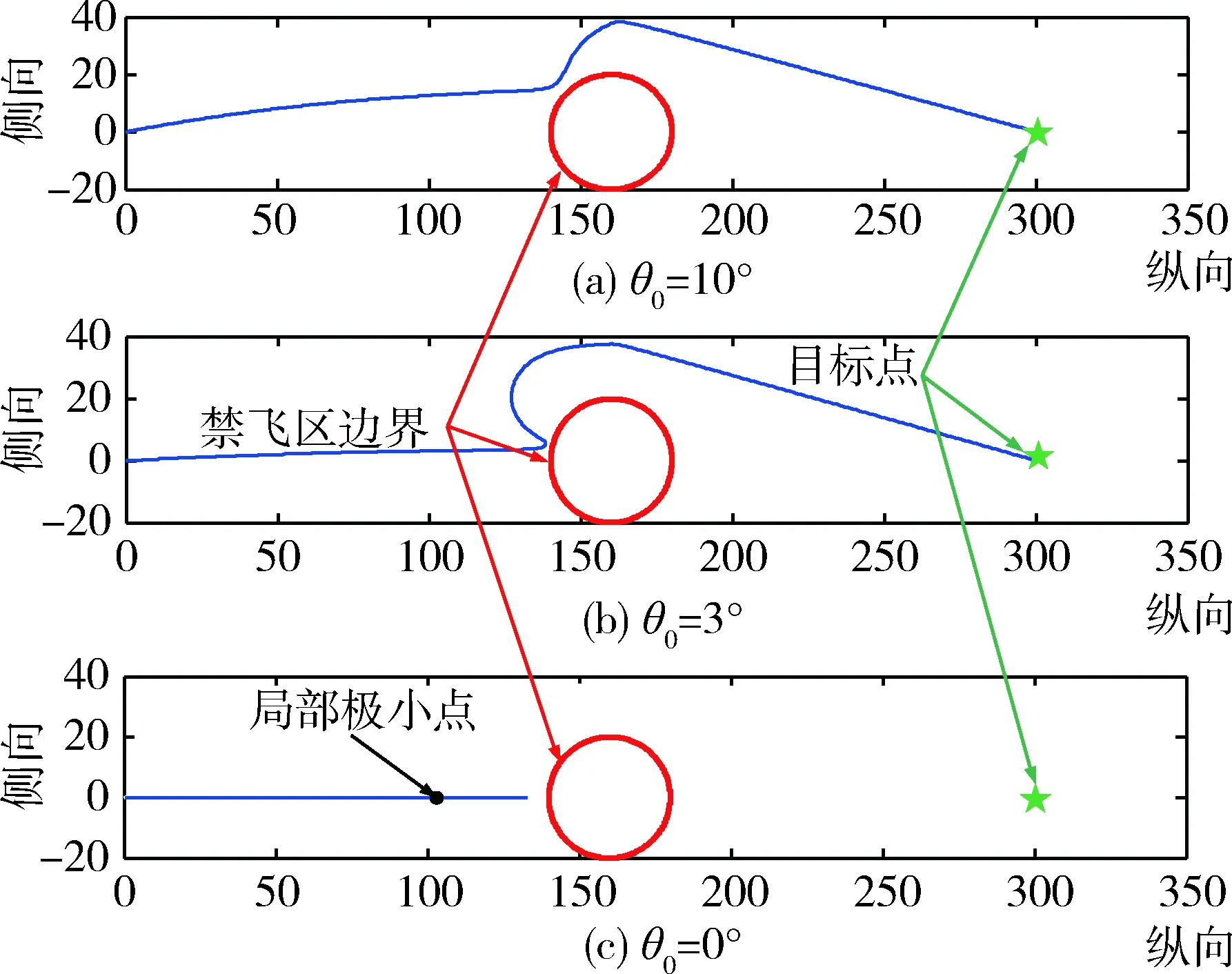
圖4 基于傳統人工勢場法二維平面軌跡規劃結果
從圖4可以看出,盡管圖(a)和(b)最終都到達了目標點處,但顯然,從曲率和路徑長度方面來講,圖(a)中軌跡要優于圖(b),而圖(c)中由于軌跡上存在受力平衡點,運動體將陷入局部極小值,在平衡點附近做往復運動而無法到達目標點,規劃失敗。
為具備全局規劃能力,在規劃之前預先求解空間內的局部極小值點。方法中的局部極小值點是合力為0的點,也就是類馬鞍面勢場的鞍點。當運動體到達極小值點處,且運動方向與引力一致時,在該點處增加附加的斥力勢場,使其逃離局部極小的陷阱。另外,在航向角更新時考慮過載約束。在不同的力場系數下,改進前后所規劃的結果如圖5所示。
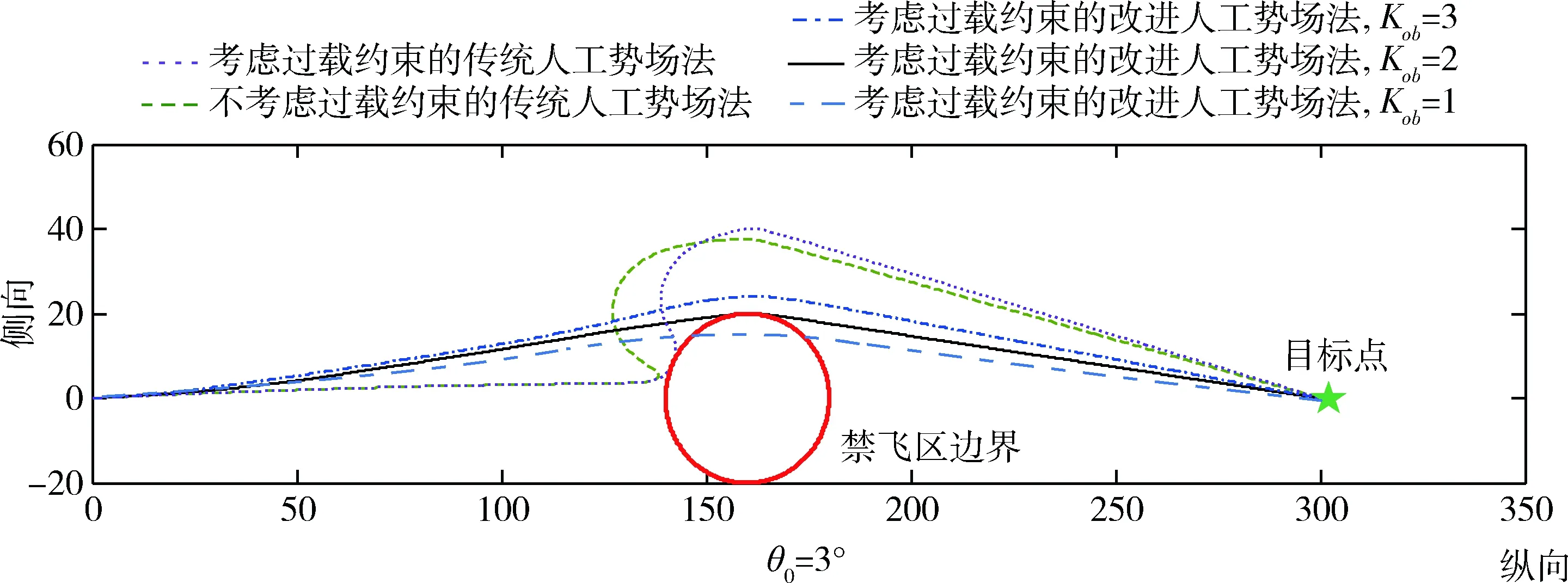
圖5 傳統與改進的人工勢場法結果對比
當Kob=1時,規劃結果未能實現避障。可見,參數Kob的取值決定了排斥力的大小,這直接關系到軌跡的平直程度。若取值過小,則有可能進入禁飛區;取值過大,則軌跡曲率有所增大,對飛行器機動能力要求較高,且控制能耗相對較多。
當禁飛區的位置(120,20)和半徑(R=30)均發生變化時,圖6給出了在Kob不同取值條件下,人工勢場法所得到的標稱軌跡。
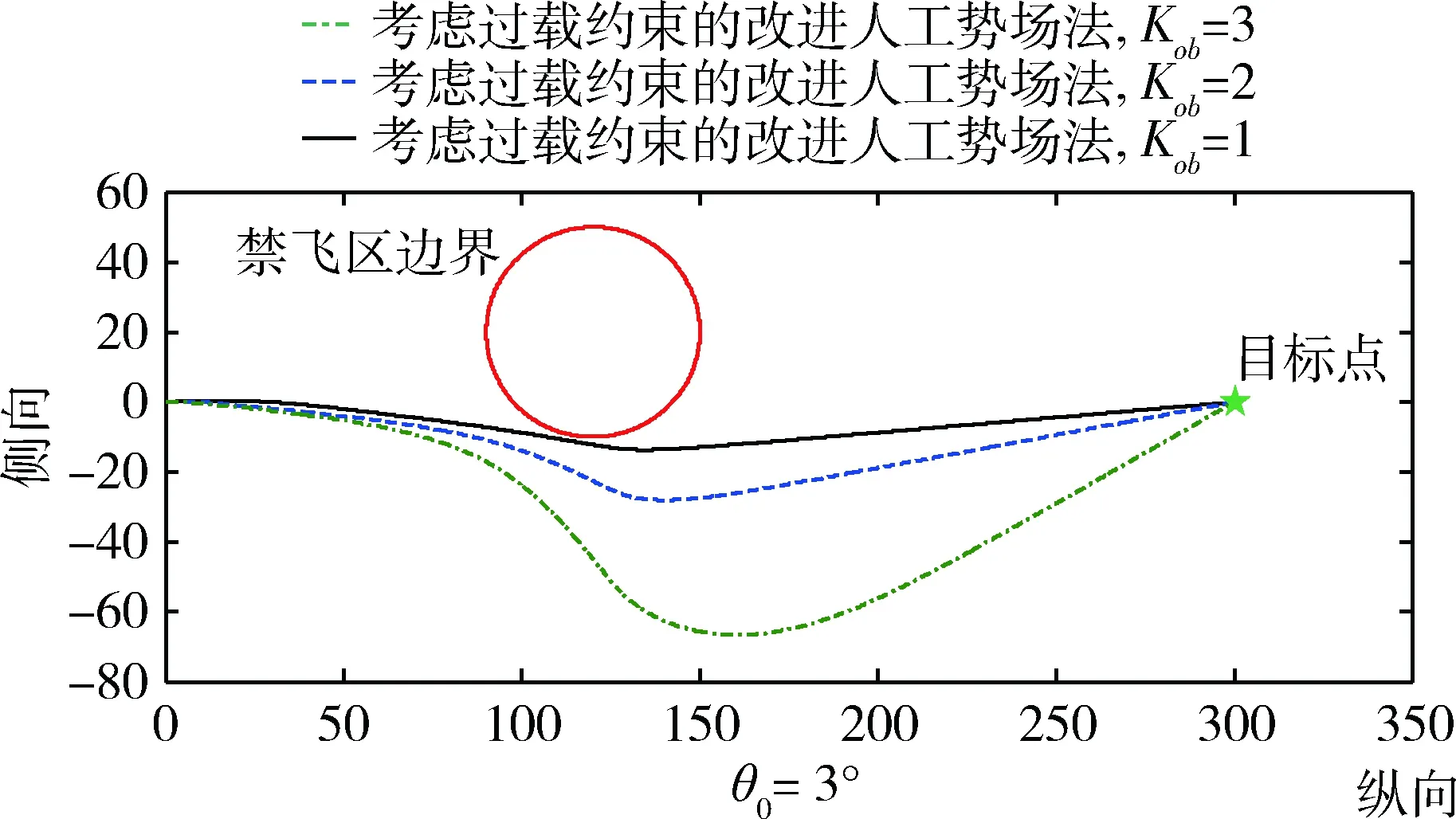
圖6 禁飛區發生變化時規劃的標稱軌跡
在上述情形下,當Kob=1時所得到的軌跡可實現避障,且軌跡相對平直,相比較Kob=2和Kob=3所得到的軌跡品質更好。通過2種情形下的仿真對比,可知最優參數與具體的約束條件密切相關。
以上數學仿真,在主頻2.08G的PC機Matlab平臺上運行,經統計,耗時均在0.1s以內,因此,該方法適用于在線規劃。
4 結論
人工勢場法是一種適用于軌跡規劃的高效方法。其形式簡單,參數相對較少,具有計算速度快、占用內存少的優點,適用于在線實現與應用。由該方法規劃得到的軌跡能保證其二階可微,同時能滿足飛行器可用過載的約束,整個軌跡始終處于飛行器的飛行包絡中。
利用改進的人工勢場法解決了二維平面的軌跡規劃問題,結果可作為待跟蹤的標稱軌跡,具有一定的工程應用價值。通過對比研究,改進的人工勢場法可預防陷入局部極小問題,且軌跡對應的機動過載是連續的。然而,這種方法得到的標稱軌跡并非某種指標下的最優軌跡。因此,應引入軌跡性能的評價機制,優化設計參數,以改善軌跡的最優性。這方面的研究有待在后續工作中展開。
[1] Khatib O. Real-time Obstacle Avoidance for Manipulators and Mobile Robots [J]. International Journal of Robotics Research, 1986, 5(1): 90-98.
[2] Jurgen. G, Vadim I. Sliding Mode Control for Gradient Tracking and Robot Navigation Using Artificial Potential Fields [J]. IEEE Trans. on Robotics and Automation, 1995, 11(2): 247-254.
[3] Jing Ren, Kenneth A. McIsaac, Rajni V. Patel, et al. A Potential Field Model Using Generalized Sigmoid Functions [J]. IEEE Transactions on Systems, Man, Aad Cybernetics—Part B: Cybernetics, 2007, 37(4): 477-484.
[4] 張建英,劉暾. 基于人工勢場法的移動機器人最優路徑規劃[J]. 航空學報,2007,28(8): S183-S188.(Zhang Jianying, Liu Tun.Optimized Path Planning of Mobile Robot Based on Artificial Potential Field [J]. Acta Aeronautica Et Astronautica Sinica, 2007,28(8): S183-S188.)
[5] 李滋堤,孫富春,吳鳳鴿等.基于人工勢場的空間遙操作共享控制[J].清華大學學報(自然科學版),2010,50(10):1728-1732.(Li Zidi, Sun Fuchun, Liu Huaping, et al. Shared Control for Space Teleoperation Using Artificial Potential Field [J]. Tsinghua Univ (Sci & Tech), 2010,50(10):1728-1732.)
[6] 朱毅, 張濤, 宋靖雁. 未知環境下勢場法路徑規劃的局部極小問題研究[J]. 自動化學報,2010, 26(8): 1122-1130.(Zhu Y, Zhang T, Song J Y, Study on the Local Minima Problem of Path Planning Using Potential Field Method in Unknown Environments[J]. ACTA Automatica Sinica, 2010, 26(8): 1122-1130.)
[7] 彭建亮,孫秀霞,蔡滿意等. 基于人工勢場的防空威脅建模與仿真[J]. 系統工程與電子技術,2010, 32(2): 338-341.(Peng Jianliang, Sun Xiuxia, Cai Manyi, et al. Modeling and Simulation of Air Defense Threat Based on Artificial Potential Field [J]. System Engineering and Electronics, 2010, 32(2): 338-341.)
[8] 羅冠辰,于劍橋,張思宇等. 穿越惡劣天氣區域的無人機航跡規劃[J]. 北京理工大學學報,2014, 34(10): 1054-1059.( Luo Guanchen, Yu Jianqiao, Zhang Siyu, et al. UAV Path Planning Across Weather Threat [J]. Transactions of Beijing Institute of Technology, 2014, 34(10): 1054-1059.)
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41