一種方向舵-螺旋槳聯用的全翼式太陽能無人機橫航向控制方法
2018-04-03 06:56:32馬振宇祝小平周洲
航空學報 2018年3期
關鍵詞:設計
馬振宇,祝小平,周洲
1. 西北工業大學 航天學院,西安 710072 2. 西北工業大學 無人機特種技術重點實驗室,西安 710065 3. 西北工業大學 航空學院,西安 710072
隨著太陽能電池、二次電池技術的飛速發展,實現太陽能飛機永久飛行成為可能,繼“太陽神[1]”無人機之后全球掀起了又一次太陽能無人機的研究熱潮。2010年英國“西風[2]”無人機不間斷飛行14天創造了新的世界紀錄。瑞士蘇黎世聯邦理工的“Atlantik[3-4]”小型太陽能無人機于2015年7月完成81.5 h不間斷飛行。Facebook公司的“aquila”太陽能無人機于2016年6月實現首飛。
受限于太陽輻射能量,太陽能無人機均采用大展弦比機翼、超低結構面密度設計來提高氣動效率、降低結構重量[5]。因此太陽能無人機具有機翼扭轉剛度差的特點,副翼的操縱效率很低,較大動壓下有可能出現副翼反效。針對這一問題“西風”和“太陽神”無人機取消了副翼,分別采用方向舵和螺旋槳差動進行橫航向控制。本文研究的全翼式太陽能無人機[6]將方向舵面放置在重心以下,方向舵偏轉既能產生偏航力矩又能產生滾轉力矩,并且機翼采用較大上反角設計,方向舵偏轉產生的側滑角也將帶來較大的滾轉力矩,因此可以采用方向舵進行橫向控制。同時采用雙螺旋槳提供動力,使全翼式太陽能無人機也可以使用螺旋槳差動進行航向控制。
除了“西風”這樣的大型太陽能無人機,“大烏鴉”、“云雀”等小型無人機為了減少系統復雜度也僅采用方向舵進行橫航向控制。Meola等[7]基于比例-積分-微分(PID)控制理論設計了由偏航阻尼、滾轉角控制和偏航角控制組成的橫航向控制器,結果表明采用方向舵控制滾轉是可行的。與副翼直接產生滾轉力矩不同,方向舵控制需要先產生側滑,再依靠橫航向穩定性產生滾轉力矩,因此需要匹配無人機的操縱性與穩定性。成鑫等[8]通過仿真及實驗分析驗證了小型無副翼電動無人機的飛行品質,對比了機翼上反角與垂尾容量對橫航向操穩特性的影響。目前針對螺旋槳差動的研究主要集中在控制分配與操穩特性分析。趙維娜等[9]提出了基于能量約束的太陽能無人機多螺旋槳差動控制分配方法。徐明興等[10]提出了以誤差和螺旋槳拉力二范數最小為目標的螺旋槳差動控制分配方法。王睿等[11]研究了螺旋槳帶來的附加偏航阻尼導數,結果表明多螺旋槳能夠大幅度提高無人機的偏航阻尼,改善無人機螺旋模態特性。
由于全翼式太陽能無人機飛行速度低、航向穩定性差,在飛行過程中對風場擾動、速度變化等比較敏感,因此設計的橫航向控制系統必須具有較好的綜合抗擾動能力。Gao[12]在韓京清[13]提出的自抗擾控制器的基礎上,設計了基于線性擴張狀態觀測器(Linear Extended State Observer, LESO)的線性自抗擾控制器,在具有較強抗干擾能力的同時簡化了參數整定過程。
基于上述分析,本文針對雙螺旋槳無副翼全翼式太陽能無人機,分析了其橫航向特性,并基于線性自抗擾控制理論設計了滾轉角控制器和偏航角控制器。在這兩個控制器的基礎上設計了適合全翼式太陽能無人機的混合型直線軌跡跟蹤器。
1 全翼式太陽能無人機橫航向飛行品質
1.1 氣動布局與橫航向氣動導數
全翼式太陽能無人機外形如圖 1所示,全機由中央翼段、垂直安定面、方向舵及外翼段組成,結構相對簡潔。外翼段上反,并和中央翼段形成負扭轉。兩個垂直安定面和方向舵面布置在中央翼段的下方,同時垂直安定面上安裝輪胎作為起落架使用。全翼式太陽能無人機與圖 2所示正常式布局太陽能無人機的基本飛行參數和橫航向氣動導數如表1和表2所示。
橫航向靜導數方面,全翼式太陽能飛機橫向靜穩定系數Cl β和航向靜穩定系數Cn β與正常式太陽能無人機基本相同,但由于采用了較大的垂直安定面,CY β大約是正常式太陽能無人機的3倍。橫航向動導數方面,全翼式太陽能無人機滾轉阻尼導數Cl p、滾轉交感力矩導數Cn p和偏航交感力矩導數Cl r與正常式太陽能無人機基本相同。由于無尾設計,全翼式太陽能飛機的偏航阻尼導數Cn r絕對值極小,大約是正常式太陽能飛機的1/5。
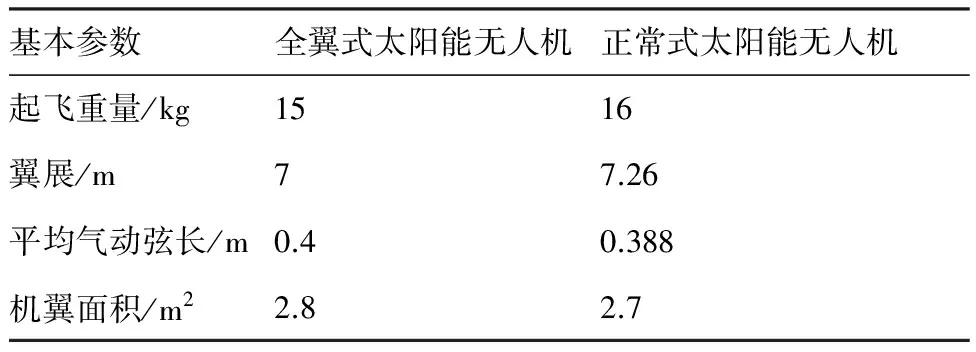
表1 全翼式和正常式太陽能無人機的基本參數
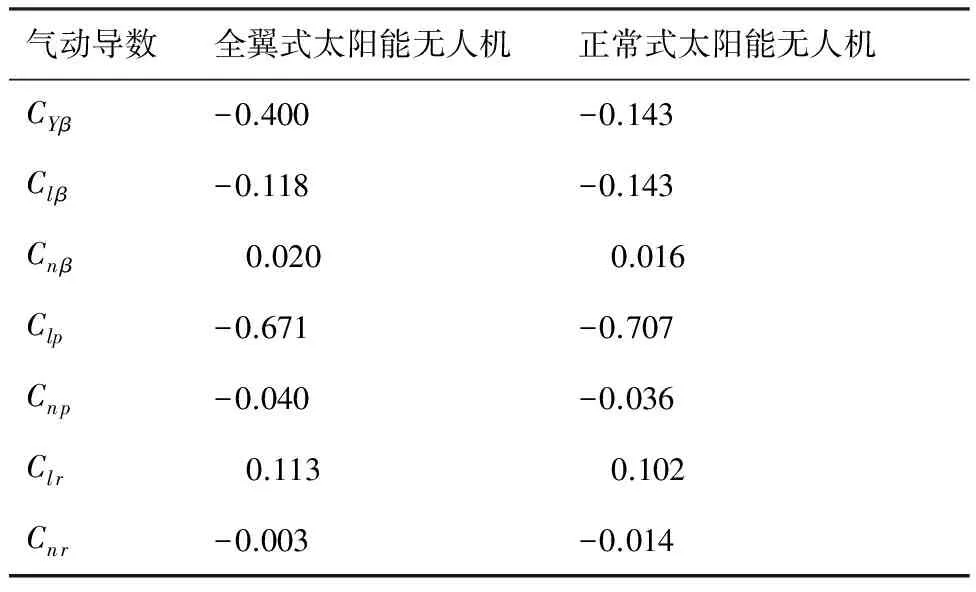
表2 全翼式和正常式太陽能無人機橫航向氣動導數
1.2 無人機橫航向運動方程
[14]建立的雙螺旋槳無人機橫航向非線性動力學模型為
(1)
式中:
(2)
(3)
ΔTdmsinθm
(4)
ΔTdmcosθm
(5)

螺旋槳拉力T與油門δt的關系可以簡化為[14]
(6)
式中:ρ為空氣密度;Sp、Cp和Vp為螺旋槳槳盤面積、拉力系數和來流速度;km為油門到螺旋槳出流速度的系數。
考慮偏航角速度對螺旋槳拉力的影響,左右側螺旋槳處的來流速度分別為
(7)
當左右油門到δt的差值為±Δδt時,左右螺旋槳拉力差為
(8)
當左右油門相同時,左右螺旋槳拉力差為
ΔT=-2ρSpCpdmr
(9)
式中:ρ、Sp、Cp和dm均為正值,所以雙螺旋槳設計可以為太陽能飛機提供一定的航向阻尼,這對于偏航力矩阻尼導數極小的全翼式太陽能無人機十分有利。
1.3 橫航向穩定性分析
添加補充方程
(10)
利用泰勒展開求橫航向小擾動方程組為
(11)
式中:狀態矢量x=[βprφψ]T;A為狀態矩陣;B為控制矩陣;u=[Δδtδr]T為控制輸入。
(12)
(13)
其中:
(14)
(15)
(16)
(17)
其他參數見文獻[15]。
在高度為500 m、速度為13 m/s的狀態點,通過狀態矩陣A計算橫航向模態特征根和模態參數,并與1.1節中的常規布局太陽能無人機在相同狀態點的數據進行對比,如表3所示。
雖然都采用大展弦比平直機翼設計,但由于正常式太陽能無人機載荷集中在機身,橫向轉動慣量小,因此滾轉收斂模態特征根是全翼式太陽能無人機的2倍。全翼式太陽能無人機的螺旋模態發散,而正常式太陽能無人機收斂,所以全翼式太陽能無人機的航向穩定性較差,更容易進入螺旋。全翼式太陽能無人機的荷蘭滾模態無阻尼自然頻率和阻尼比都稍大于正常式太陽能無人機,因此該全翼式太陽能無人機的荷蘭滾模態穩定性更好。
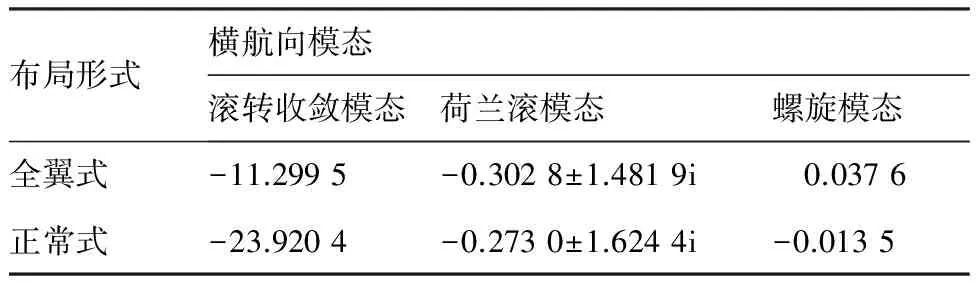
表3 全翼式和正常式太陽能無人機橫航向模態特征根
1.4 橫航向操縱性分析
通常飛機通過副翼偏轉控制滾轉,方向舵偏轉控制側滑,而全翼式太陽能飛機只能通過方向舵偏轉和螺旋槳差動進行橫航向控制,因此需要分析該類飛機的操縱特性。在巡航狀態點,無人機方向舵偏轉和螺旋槳差動產生相同的偏航力矩時響應如圖3所示。
圖 3(a)為瞬時曲線,由圖可知方向舵偏轉在較短時間內引起的滾轉角大于螺旋槳差動,而引起的航向角小于螺旋槳差動,因此使用方向舵偏轉控制滾轉而螺旋槳差動控制偏航較為合理。同時20°已是方向舵偏轉的最大值,而-6.0%遠未達到螺旋槳差動的極限,所以螺旋槳差動的操縱能力更強。圖 3(b)為較長時間的響應曲線。由圖可知,螺旋槳差動依然能產生更大偏航角,而在振蕩逐漸收斂后,螺旋槳差動與方向舵偏轉產生的滾轉效果基本相同。結合滾轉角速度的響應曲線表明,在方向舵偏轉后短時間內由于側滑較小,滾轉力矩主要由方向舵偏轉直接產生,而后側滑角逐漸變大,滾轉力矩主要由側滑角產生。相比之下副翼操縱則始終能直接產生較大的滾轉力矩,控制過程也更加直接。
2 橫航向控制器設計
橫航向控制器由滾轉角控制器、偏航角控制器和軌跡跟蹤器組成。
2.1 滾轉角控制器
全翼式太陽能通過方向舵控制滾轉,但由于偏航阻尼導數很小,需要先加入偏航阻尼器以保證安全飛行,再基于線性自抗擾控制(LADRC)理論設計滾轉角控制器,具體結構如圖 4所示。
1)只考慮偏航角速度和方向舵偏轉產生的偏航力矩,式(1)的第5項簡化為
(18)
設計偏航阻尼控制律為
(19)
式中:Krd為偏航阻尼控制律的增益系數;S為參數面積。
定義動壓縮放系數qs為
(20)
式中:qn、ρn和Van為太陽能飛機設計巡航點的動壓、空氣密度與速度。
(21)
將式(20)和式(21)代入式(19)可得
(22)
2)基于LADRC的滾轉角控制器
式(1)第2項和第4項寫為嚴格的仿射形式:
(23)
式中:fφ和fp為系統的待觀測動態環節;bp為方向舵作用系數,定義巡航點控制矩陣并與動壓縮放系數代入bp,可得
(24)
按照線性自抗擾控制器基本結構[16],設計如下LADRC控制器:
設計過渡指令產生器(TD)為
(25)
式中:φcmd為滾轉角指令;φref為滾轉角過渡指令;rφ和h0為待整定參數;fhan為最速控制綜合函數[17]。
設計線性擴張狀態觀測器(LESO)估計fφ為
(26)
設計誤差反饋并補償觀測動態環節為
(27)

(28)
設計誤差反饋并補償觀測動態環節:
(29)
(30)
代入式(29)可得
(31)
滾轉角控制器最終得到的方向舵偏角為
δr=δr1+δr2
(32)
2.2 偏航角控制器
全翼式太陽能無人機可以通過螺旋槳差動對航向進行快速調整。與滾轉角控制器類似,設計基于線性自抗擾理論的偏航角控制器,其結構如圖 5所示。
式(1)的第3項和第5項可以寫為嚴格的仿射形式:
(33)
設計偏航角過渡指令產生器為
(34)
分別設計偏航角和偏航角度誤差反饋并補償觀測動態環節:
(35)
(36)
設計LESO觀測器為
(37)
(38)
2.3 軌跡跟蹤器
[18]設計L1直線軌跡跟蹤器,無人機與直線目標路徑的示意圖如圖 6所示。圖中d為航跡誤差;L1為無人機到參考點的距離;V為水平方向上的無人機飛行速度;χ為無人機的航跡偏角;as為期望側向加速度;Ψt為目標路徑的方位角。
假設無人機在水平方向做圓周運動,并認為航跡偏角與偏航角相同:
(39)
(40)
假設轉彎過程中,無人機高度不變,此時重力與無人機升力在垂直方向的分量相等。可得期望滾轉角為
(41)
取KL為V與L1之間的比例系數,即L1=KLV,代入式(41)可得
(42)
同時可以得到期望偏航角為
Ψcmd=ψt+η1
(43)
通過控制滾轉角和偏航角都可以使太陽能無人機完成直線軌跡跟蹤。通過螺旋槳差動控制偏航角適合于航向需要大范圍快速調整的情況,而太陽能無人機正常飛行過程中都很平穩,航向調整范圍較小,使用方向舵可以避免電機頻繁加減速帶來的能量損耗。所以設計以下的混合型控制策略:
(44)
式中:φc和ψc為輸入給滾轉角控制器和偏航角控制器的指令信號;φlim為最大滾轉角指令;dlim為控制器切換的閾值;sat(·)為飽和函數。
當飛行器到目標路徑的距離大于dlim時,偏航控制器和滾轉角控制器同時工作,提高響應速度。而小于dlim時,只使用滾轉角控制器,關閉偏航控制器,提高飛行的經濟性。其結構如圖 7所示。
3 仿真分析
3.1 全翼式太陽能無人機仿真參數
該太陽能無人機方向舵可動范圍為±20°,舵機采用時間常數為0.05 s的慣性環節代替,螺旋槳差動范圍為±20%,動力系統采用時間常數為0.1 s的慣性環節代替。
仿真時考慮側向陣風對太陽能無人機的影響。采用半波長離散陣風模型:
(45)
式中:VW為陣風大小;dW為陣風尺度;VWm為陣風強度;x為遇到陣風后的運動距離。陣風對橫航向的影響主要體現在側滑角的變化上。對側滑角進行近似修正:
βcorr=βK+βW≈β-vW/Va
(46)
式中:βcorr為修正后的側滑角;βK為航跡側滑角;vW為VW在機體軸側向的分量。
3.2 控制器參數整定
3.3 仿真驗證及分析
定義3個初始飛行狀態(Flight Conditions,FC)FC1~FC3:高度為500 m,速度分別為11、13和17 m/s,初始姿態角為0°、角速度為0 (°)/s,其中:FC1為失速速度,FC2為設計巡航速度,FC3為顫振邊界速度。定義兩個仿真條件(Simulation Conditions,SC),SC1為不進行任何處理的理想狀態,SC2則將無人機機體氣動參數、舵面氣動參數和螺旋槳差動效率正向拉偏30%,并在t=0 s時加入[l,n]=[sin(2t),sin(2t)] N·m的干擾力矩。
3.3.1 滾轉角控制器
驗證LADRC滾轉角控制器的有效性、魯棒性及抗風能力,并與串級PID滾轉角控制器進行對比。圖 8為SC1仿真條件下,在FC2狀態點串級PID滾轉角控制器與LADRC滾轉角控制器跟蹤滾轉角指令的響應結果。圖 9為SC2仿真條件下,并在t=15 s遇到強度為5 m/s的側風時,LADRC控制器在FC1~FC3狀態點的響應曲線和串級PID控制器在FC2狀態點的響應曲線。
由圖 8可知,LADRC滾轉角控制器能夠很好跟蹤滾轉角指令,控制過程平滑無超調,跟蹤5°階躍指令的上升時間為4.9 s,而串級PID滾轉角控制器由于沒有LESO觀測擾動,因此收斂速度較慢。同時由于沒有TD環節,串級PID的控制過程出現超調,且舵面偏轉出現飽和。由圖 9可知,即使進行了參數拉偏并加入干擾力矩,LADRC控制器依然能在不同狀態點有效跟蹤指令信號,平穩狀態下滾轉角和側滑角的抖動幅度小于0.02°和0.5°,明顯優于串級PID控制器,表明該控制器在不同狀態點都具有較好的魯棒性。與此同時陣風對LADRC控制器滾轉姿態的影響小于1°,對側滑角的影響小于5°,也明顯優于串級PID控制器,因此LADRC控制器的抗側風能力也比串級PID控制器好。
3.3.2 偏航角控制器
驗證LADRC偏航角控制器的有效性、魯棒性及抗風能力,并與串級PID偏航角控制器進行對比。圖 10為SC1仿真條件下,在FC2狀態點串級PID偏航角控制器與LADRC偏航角控制器跟蹤偏航角指令的響應結果。圖 11為SC2仿真條件下,并在t=25 s遇到強度為5 m/s的側風時,LADRC控制器在FC1~FC3狀態點,串級PID控制器在FC2狀態點的響應曲線。
由圖 10可知,串級PID和LADRC偏航角控制器都可以有效跟蹤偏航角指令,90°階躍指令的上升時間分別為9 s和15 s。由于沒有TD環節的限制,串級PID控制器的響應速度更快,但控制過程產生的滾轉角、側滑角和螺旋槳差動也更大。
圖11驗證了偏航角控制器的魯棒性和抗風性。由圖可知,即使進行了參數拉偏并加入干擾力矩后串級PID和LADRC偏航角控制器都能夠有效跟蹤指令信號。相比于串級PID控制器,LADRC控制器可以更加有效抑制側風對偏航角的影響,但側風依然會對滾轉角和側滑角產生顯著影響。與圖 9相比,在相同側風條件下采用偏航角控制器產生的滾轉角和側滑角的幅值是采用滾轉角控制器的3.5倍和4.4倍,因此LADRC偏航角控制器在風中的安全性較差,只有將滾轉角控制器和偏航角控制器進行有效組合才能更快、更安全的進行橫航向操縱。
3.3.3 軌跡跟蹤器
在FC2狀態下跟蹤直線軌跡,內環分別采用滾轉角控制器、偏航角控制器和混合型軌跡跟蹤器進行對比仿真。圖 12為SC1仿真條件下3種控制器的響應曲線。圖 13為SC1仿真條件下,3種控制器在t=0 s時遇到5 m/s側風的響應結果。圖 14為SC2仿真條件下,t=0 s時遇到強度為5 m/s的側風時混合型軌跡跟蹤器在FC1~FC3狀態點的響應曲線。
從圖12中可以看出單獨使用滾轉角控制器跟蹤直線軌跡會出現11%的超調量,并且收斂速度較慢,而單獨使用偏航角控制器雖然沒有超調,但是控制過程中會出現較大滾轉角,不利于飛行安全。而采用混合型直線軌跡跟蹤器不僅收斂速度快、沒有超調,還能有效限制滾轉角。
從圖13中可以看到,在風場中滾轉角控制器跟蹤直線軌跡的能力最弱,而混合型直線軌跡跟蹤器能夠有效抵御陣風的影響,同時在控制過程中滾轉角和側滑角要明顯小于其他兩種控制器。
圖 14驗證了混合型軌跡跟蹤器的魯棒性和抗風能力,在參數拉偏和加入力矩干擾的條件下,控制器依然能在5 m/s的側風中,對不同狀態點進行有效控制。從圖中可以看出該軌跡跟蹤器,收斂速度較快并且幾乎沒有超調,滾轉角和側滑角變化幅度分別小于8°和5°,穩定飛行時滾轉角、側滑角和偏航角的抖動幅度分別小于0.2°、0.5°和1°。表明該控制方法不僅控制效果好,同時具有較好的魯棒性和抗風能力。
4 結 論
1) 采用方向舵偏轉和螺旋槳差動能夠對全翼式太陽能無人機橫航向進行有效控制,并且具有較好的魯棒性和抗風能力。
2) 在跟蹤直線軌跡時:單獨采用方向舵偏轉進行滾轉角控制安全性較好,但偏航角調整滯后且超調比較嚴重;單獨采用螺旋槳差動進行偏航角控制收斂速度較快,航向抗風能力強,但滾轉方向安全性較差;采用兩者組合的方法不但響應速度快、超調小,而且具有較好的抗風能力。
3) 本文設計的控制方法結構簡單,采用實際方便可測的物理量,待整定參數較少且大部分具有實際物理意義,一組參數適用于多個飛行狀態,具有較好的工程實現性。
參 考 文 獻
[1] BHATT M R. Solar power unmanned aerial vehicle: High altitude long endurance applications (HALE-SPUAV)[D]. San Jose, CA: San Jose State University, 2012: 10-13.
[2] Airbus Defence and Space. Qinetiq Zephyr[EB/OL]. (2017-5-10)[2017-7-26].https:∥en.wikipedia.org/wiki/Qinetiq Zephyr.
[3] OETTERSHAGEN P, MELZER A, MANTEL T. Design of small hand-launched solar-powered UAVs: From concept study to a multi-day world endurance record flight[J]. Journal of Field Robotics, 2017, 34(7): 1352-1377.
[4] OETTERSHAGEN P, MELZER A, MANTEL T. Perpetual flight with a small solar-powered UAV: Flight results, performance analysis and model validation[C]∥2016 IEEE Aerospace Conference.Piscataway,NJ: IEEE Press, 2016: 1-8.
[5] 張健, 張德虎. 高空長航時太陽能無人機總體設計要點分析[J]. 航空學報, 2016, 37(S1): 1-7.
ZHANG J, ZHANG D H. Essentials of configuration design of HALE solar-powered UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(S1): 1-7 (in Chinese).
[6] 甘文彪, 周洲, 許曉平. 仿生全翼式太陽能無人機氣動數值模擬[J]. 航空學報, 2015, 36(10): 3284-3294.
GAN W B, ZHOU Z, XU X P. Aerodynamic numerical simulation of bionic full-wing typical solar-powered unmanned aerial vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2015 ,36(10): 3284-3294 (in Chinese).
[7] MEOLA D, IANNELLI L, GLIELMO L. Flight control system for small-size unmanned aerial vehicles: Design and software-in-the-loop validation[C]∥2013 21st Mediterranean Conference on Control & Automation (MED).Piscataway, NJ: IEEE Press, 2013: 357-362.
[8] 成鑫, 王和平, 張怡哲, 等. 小型無副翼電動無人機橫航向特性研究[J]. 飛行力學, 2009, 27(4): 74-77.
CHENG X, WANG H P, ZHANG Y Z, et al. Electric and no aileron SUAV’s lateral-direct dynamic characters[J]. Flight Dynamics, 2009, 27(4): 74-77 (in Chinese).
[9] 趙維娜, 孫誠驍, 周平方, 等. 多螺旋槳太陽能無人機航向控制分配方法[J]. 哈爾濱工程大學學報, 2015, 36(4): 467-472.
ZHAO W N, SUN C X, ZHOU P F, et al. Directional control allocation of a multi-propeller solar UAV[J]. Journal of Harbin Engineering University, 2015, 36(4): 467-472 (in Chinese).
[10] 徐明興, 祝小平, 周洲, 等. 多螺旋槳太陽能無人機推力分配方法研究[J]. 西北工業大學學報, 2013, 31(4): 505-510.
XU M X, ZHU X P, ZHOU Z, et al. Exploring an effective method of thrust allocation for solar-powered UAV with multiple propellers[J]. Journal of Northwestern Polytechnical University, 2013, 31(4): 505-510 (in Chinese).
[11] 王睿, 祝小平, 周洲. 多螺旋槳太陽能無人機橫航向操穩特性研究[J]. 飛行力學, 2012, 30(1): 5-8.
WANG R, ZHU X P, ZHOU Z. Research on lateral-directional flying qualities of multi-propeller solar powered UAV[J]. Flight Dynamics, 2012, 30(1): 5-8 (in Chinese).
[12] GAO Z Q. Active disturbance rejection control: A paradigm shift in feedback control system design[C]∥IEEE American Control Conference. Piscataway, NJ: IEEE Press, 2006: 7.
[13] 韓京清. 自抗擾控制器及其應用[J]. 控制與決策,1998, 13(1): 19-23.
HAN J Q. Active disturbance rejection controller and its applications[J]. Control and Decision, 1998, 13(1): 19-23 (in Chinese).
[14] BEARD R W, MCLAIN T W. Small unmanned aircraft: Theory and practice[M]. Princeton, NJ: Princeton University Press, 2012: 52-92.
[15] 方振平, 陳萬春, 張曙光. 航空飛行器飛行動力學[M].北京: 北京航空航天大學出版社, 2005: 325-375.
FANG Z P, CHEN W C, ZHANG S G. Aircraft flight dynamics[M]. Beijing: Beihang University Press, 2005: 325-375 (in Chinese).
[16] 韓京清. 自抗擾控制技術[M]. 北京: 國防工業出版社, 2008: 316-331.
HAN J Q. Active disturbance rejection control technique[M]. Beijing: Nation Defense Industry Press, 2008: 316-331 (in Chinese).
[17] 黃一, 韓京清. 非線性連續二階擴張狀態觀測器的分析與設計[J]. 科學通報, 2000, 45(13): 1373-1379.
HUANG Y, HAN J Q. Analysis and design for the second order nonlinear continuous extended states observer[J]. Chinese Science Bulletin, 2000, 45(13): 1373-1379 (in Chinese).
[18] PARK S, DEYST J, HOW J P. A new nonlinear guidance logic for trajectory tracking[C]∥AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston, VA: AIAA, 2004: 16-19.
[19] 張波. 飛翼布局無人機全包線飛行控制技術研究[D]. 西安: 西北工業大學, 2016: 39-40.
ZHANG B. Flight control for flying wing unmanned aerial vehicle within full envelope[D]. Xi’an: Northwestern Polytechnical University, 2016: 39-40 (in Chinese).
[20] HERBST G. Practical active disturbance rejection control: Bumpless transfer, rate limitation, and incremental algorithm[J]. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1754-1762.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04