面向稀疏路網(wǎng)車輛行駛安全的瞬態(tài)縱向最優(yōu)化識別區(qū)域模型研究
2018-04-03 01:17:07周勁草馬玉春
東北師大學(xué)報(bào)(自然科學(xué)版) 2018年1期
周勁草,馬玉春,魏 朗
(1.長安大學(xué)汽車學(xué)院,陜西 西安 710064; 2.新疆大學(xué)機(jī)械工程學(xué)院,新疆 烏魯木齊 830046; 3.長安大學(xué)公路學(xué)院,陜西 西安 710064)
0 引言
我國內(nèi)蒙古、西藏和新疆地域遼闊,在這些區(qū)域的道路網(wǎng)普遍呈現(xiàn)稀疏特性.稀疏路網(wǎng)工況作為一種特殊高速道路工況,該類稀疏路網(wǎng)的特點(diǎn)是路網(wǎng)密度低、道路連通度差、道路車流量小、車輛運(yùn)行車速較快,道路技術(shù)等級整體偏低,且往往處于人口稀少區(qū)域.[1]一旦發(fā)生事故不易被發(fā)現(xiàn),事故死亡率較高,因此如何降低交通事故的發(fā)生顯得尤為重要.
隨著科學(xué)技術(shù)的發(fā)展,機(jī)器視覺技術(shù)在提高車輛主動(dòng)安全行駛中得到了廣泛的應(yīng)用.[2-4]文獻(xiàn)[5-6]采用了單目視覺進(jìn)行縱向安全距離測量的算法,給出了一種基于單目視覺的智能車輛前方障礙物識別與測距方法,該算法實(shí)現(xiàn)了縱向距離低于50 m障礙物距離測試,然而在50~100 m內(nèi)卻無法進(jìn)行測量.上述算法只能運(yùn)用于低速行駛的城市道路,卻無法運(yùn)用于稀疏路網(wǎng)工況.為解決這一問題,文獻(xiàn)[7]給出了一種基于擬合的高速道路單目視覺測距算法,該算法實(shí)現(xiàn)了10~100 m范圍內(nèi)的障礙物縱向安全距離測算,使得單目視覺測距技術(shù)能夠運(yùn)用于高速行駛工況下的高速道路,然而該算法在測量距離大于70 m測量誤差很大,不能運(yùn)用于稀疏路網(wǎng)工況下的縱向安全距離測算.
針對上述問題,本文首先建立了兩種常見發(fā)散態(tài)縱向識別區(qū)域模型,依據(jù)車輛操縱穩(wěn)定性仿真進(jìn)行了優(yōu)化分析,并獲取瞬態(tài)縱向最優(yōu)化識別區(qū)域模型,量化了穩(wěn)態(tài)成像焦距值與檢測范圍關(guān)系;其次基于Carsim完成了復(fù)雜路況下的制動(dòng)距離多樣化分析,并由修正安全制動(dòng)距離計(jì)算出了最優(yōu)化識別區(qū)域模型對應(yīng)的穩(wěn)態(tài)成像焦距值.
1 瞬態(tài)縱向最優(yōu)化識別區(qū)域模型
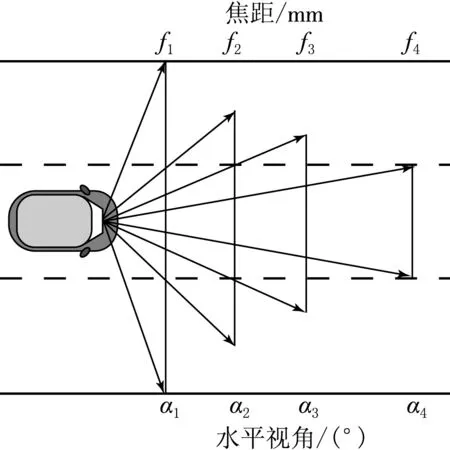
圖1 車載視覺成像范圍與水平角關(guān)系
如何恰當(dāng)?shù)倪x擇檢測區(qū)域,對于后續(xù)車輛檢測十分重要.合適的興趣檢測區(qū)不僅能夠降低計(jì)算量,而且能夠有效排除如路牌等物體的干擾進(jìn)而提高識別的準(zhǔn)確性.目前市場上流行的行車安全預(yù)警設(shè)備所采用的魚眼視角雖然能夠有效覆蓋城市道路工況,若不加改進(jìn)而應(yīng)用于稀疏路網(wǎng)工況,不僅會造成對非興趣區(qū)域的過識別,而且還會忽略有效縱向安全距離內(nèi)目標(biāo)的識別.當(dāng)車輛所載視覺感知設(shè)備選用不同焦距時(shí)獲取到的檢測范圍會有所不同(如圖1所示).為了獲取適合于稀疏路網(wǎng)工況下的最佳行車檢測區(qū)域及所對應(yīng)的焦距值,本文結(jié)合車輛操縱穩(wěn)定性原理及麋鹿實(shí)驗(yàn)對兩種發(fā)散性縱向識別模型進(jìn)行了分析,并提出收斂性瞬態(tài)最佳縱向識別區(qū)域模型,再根據(jù)稀疏路網(wǎng)固有特性及多附著系數(shù)態(tài)工況下的車輛制動(dòng)仿真,最終得出適用于稀疏路網(wǎng)工況下的最佳行車檢測區(qū)域.
作為一種特殊高速工況的稀疏路網(wǎng),事故的發(fā)生多由于駕駛員疲憊駕駛或未能及時(shí)注意前方出現(xiàn)的車輛造成.當(dāng)車載視覺傳感器焦距選擇過小,會出現(xiàn)如圖2所示的縱向過識別區(qū)及縱向欠識別區(qū).
當(dāng)車載視覺傳感器焦距選擇過大(如圖3所示),此時(shí)雖然提高了縱向行駛區(qū)域的檢測范圍,然而卻會疏漏橫向鄰域內(nèi)的檢測,造成橫向漏識別區(qū).
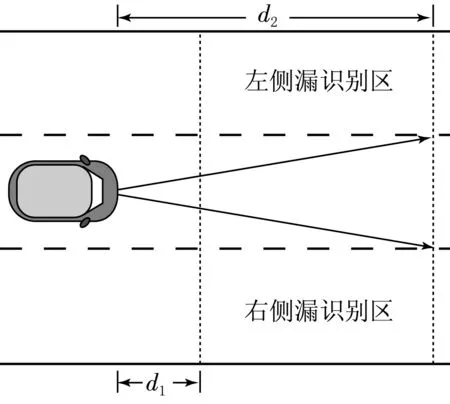
圖2 縱向發(fā)散態(tài)識別區(qū)域模型 圖3 橫向發(fā)散態(tài)識別區(qū)域模型
圖2和3中:d1,d2和d3分別為車輛縱向臨界制動(dòng)距離、縱向最大制動(dòng)距離和視覺傳感器有效檢測域值距離,S為車道總寬度.該模型下車輛有效監(jiān)測域Se=(d3-d1)×S,過監(jiān)測域So=d1×S,弱監(jiān)測域Sw=(d2-d3)×S.由于采用過小焦距,使得在弱監(jiān)測區(qū)域內(nèi)所檢測圖像像素較低,不利于縱向距離的準(zhǔn)確計(jì)算.在高速行駛中,因?yàn)轳{駛員對于前方較近距離內(nèi)車輛保持警惕,此刻視覺預(yù)警不僅沒有起到實(shí)際提醒作用,而且會增加駕駛員的緊張情緒.

當(dāng)車輛由于換道行使,監(jiān)測盲區(qū)突然出現(xiàn)在縱向監(jiān)測區(qū)域內(nèi)時(shí),駕駛員會因有效制動(dòng)距離不足,對方向盤施加一個(gè)激增力矩,以試圖規(guī)避障礙物.為了研究這種激增力矩對于行車安全的影響,本文基于Carsim進(jìn)行了模擬實(shí)驗(yàn),采用D級車、SUV和卡車3種常見車型,模擬道路工況為路面附著系數(shù)φ1=0.2的雪天和φ2=0.4的雨天工況,模擬輸入力矩為250 N·m,采用麋鹿實(shí)驗(yàn)[8-9]分析各種車輛規(guī)避前方障礙過程.實(shí)驗(yàn)道路采用如圖4(a)所示的曲線行駛道路,部分仿真結(jié)果如圖4(b)所示.
圖4(b)中Target所代表的是設(shè)定行駛路線,其余曲線代表不同車速及路面附著系數(shù)所對應(yīng)的車輛實(shí)際運(yùn)動(dòng)軌跡.計(jì)算公式為
(1)
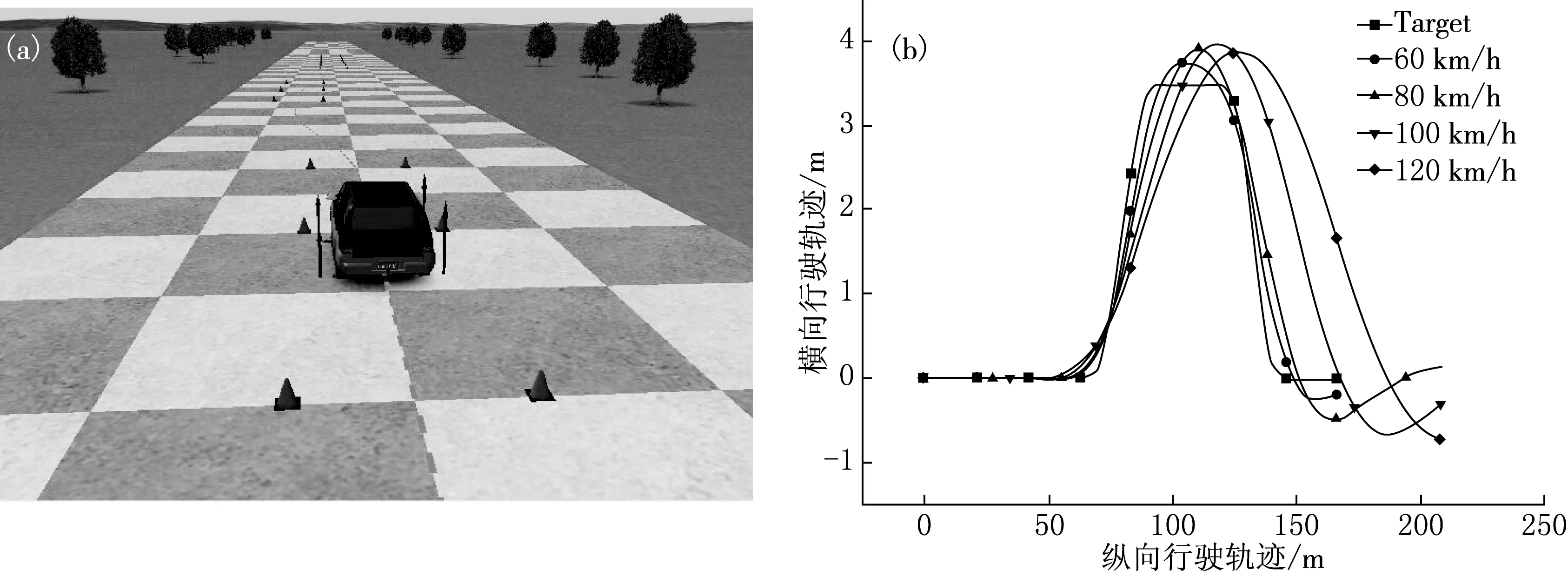
圖4 曲線行駛道路(a)及部分結(jié)果(b)
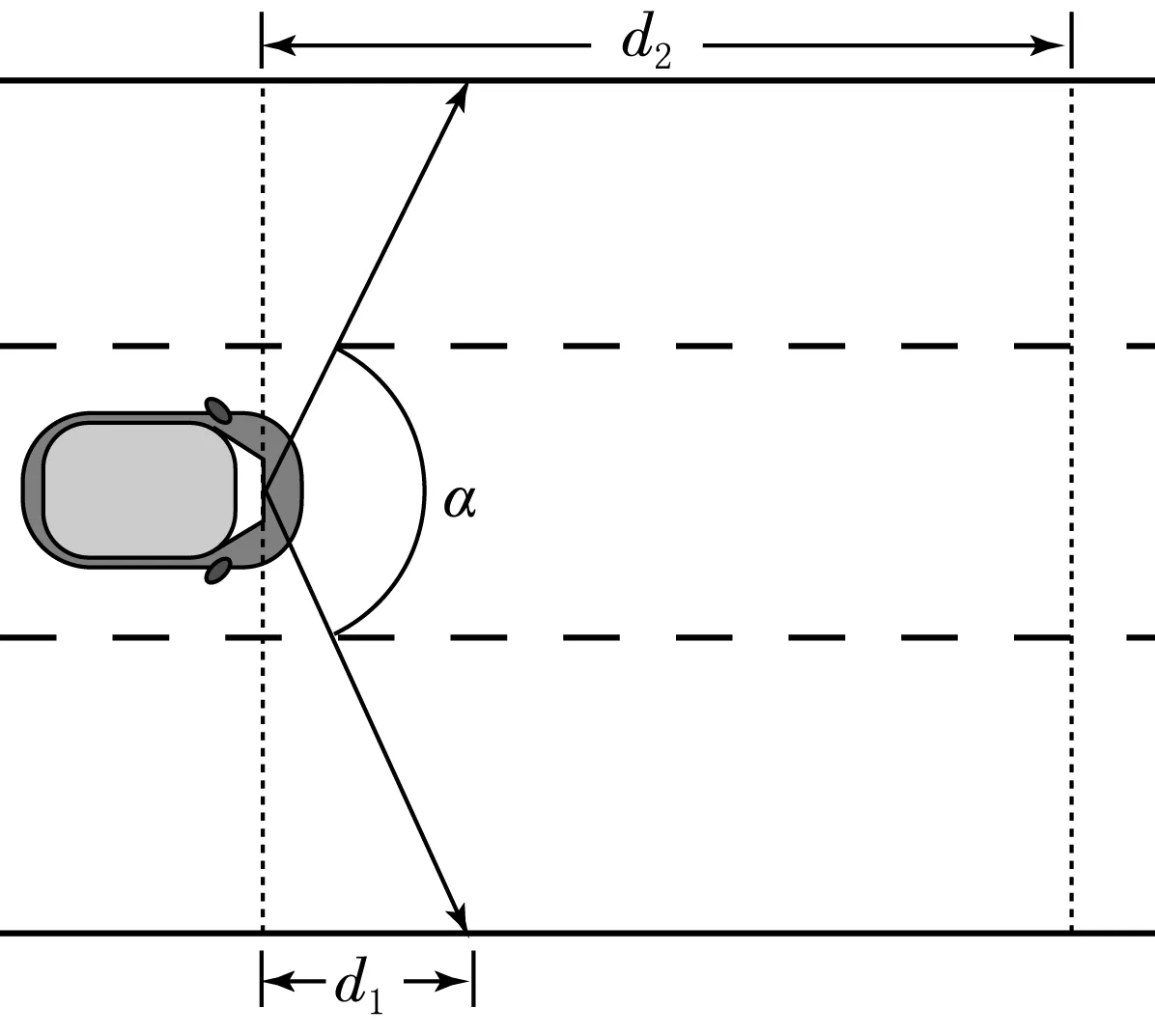
圖5 收斂態(tài)縱向預(yù)警區(qū)域模型
因此上述車輛的發(fā)散態(tài)縱向識別區(qū)域不能夠滿足稀疏路網(wǎng)工況下車輛縱向預(yù)警需求.為解決該問題,提出了如圖5所示的收斂態(tài)縱向預(yù)警區(qū)域模型.

2 車輛有效制動(dòng)域模型
為得到穩(wěn)態(tài)成像焦距值,必須獲取最小制動(dòng)距離d1;為提高算法安全度,首先建立有效制動(dòng)區(qū)域模型并基于Carsim進(jìn)行模擬仿真獲取臨界制動(dòng)區(qū)域;為提高安全系數(shù)進(jìn)行臨界制動(dòng)域修正.
2.1 有效制動(dòng)區(qū)域仿真
車輛在稀疏路網(wǎng)下行駛時(shí),從t時(shí)刻駕駛員在Xn(t)處發(fā)現(xiàn)前方車輛到采取相應(yīng)的制動(dòng)措施,經(jīng)歷Δtn時(shí)間后靜止于相距前車d0的Xn(t+Δt)處,這一過程見圖6.
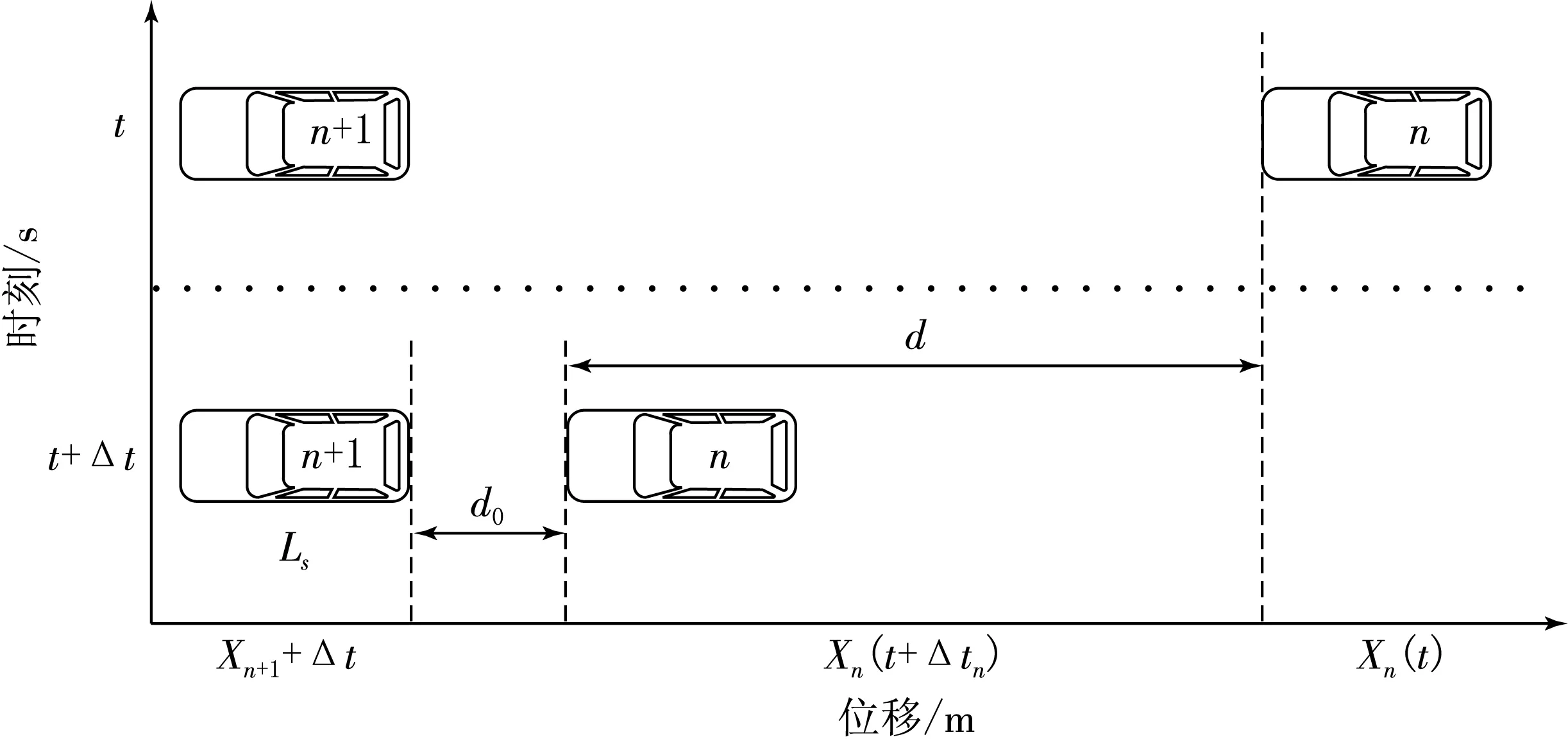
圖6 高速道路避險(xiǎn)制動(dòng)行駛示意圖
當(dāng)t時(shí)刻駕駛員發(fā)現(xiàn)前方出現(xiàn)靜止障礙時(shí),試圖采用階躍制動(dòng)力矩使車輛由初始車速靜止,為研究不同車輛在道路附著系數(shù)工況下的制動(dòng)距離,本文基于Carsim軟件進(jìn)行了模擬實(shí)驗(yàn),采用D級車、SUV、卡車及輕型皮卡4種常見車型,模擬道路工況為路面附著系數(shù)φ1=0.2的雪天和φ4=0.8的干燥道路2種極限工況,采用開環(huán)控制的階躍制動(dòng)力矩進(jìn)行研究.實(shí)驗(yàn)道路采用制動(dòng)距離測試道路,初始車速分別設(shè)定為120,90,和60 km/h.仿真道路設(shè)置及部分結(jié)果如圖7所示.

圖7 仿真道路設(shè)置(a)及部分結(jié)果(b)
2.2 有效制動(dòng)區(qū)域修正
由于Carsim中仿真僅僅考慮由車輛本身參數(shù)及路面附著系數(shù)所決定的制動(dòng)工況,然而在實(shí)際道路行駛中,必須考慮駕駛員反應(yīng)時(shí)間及安全停車間隙等問題,因此在上述仿真結(jié)果基礎(chǔ)上加入保險(xiǎn)系數(shù)(η)、停車間距(d0)及反應(yīng)時(shí)間(t).采用公式
d*=η(vt+Sb)+d0
(2)
所示的安全跟車距離進(jìn)行修正計(jì)算[10].其中:d*為安全車距;η為保險(xiǎn)系數(shù),取值范圍是1.05~1.1,本文取1.1;v為兩車相對車速,假設(shè)前車靜止,此時(shí)v等于初始車速;Sb為仿真所得車輛制動(dòng)距離;d0為停車后兩車間距,本文取值為5 m;t為反應(yīng)時(shí)間,反應(yīng)時(shí)間包括駕駛員發(fā)現(xiàn)緊急情況采取制動(dòng)的反應(yīng)時(shí)間和制動(dòng)器反應(yīng)時(shí)間之和,受駕駛員年齡、駕駛經(jīng)驗(yàn)以及車型的影響,文獻(xiàn)[7]指出我國駕駛員平均反應(yīng)時(shí)間取值范圍通常是0.73~0.93 s,本文取值為0.93 s.
令圖7中車輛制動(dòng)曲線函數(shù)為f(t),則最小制動(dòng)距離d1計(jì)算公式為
(3)


表1 最佳車載視覺成像焦距 mm
3 實(shí)驗(yàn)及分析
為獲取最佳車載視覺成像焦距值在單目視覺測距精確值,采用雙靜態(tài)實(shí)驗(yàn)-單目視覺設(shè)備保持靜止,靶源測試板靜止.實(shí)驗(yàn)場地為干燥、平坦及清潔的瀝青混凝土路面,坡度路面小于2%,直線實(shí)驗(yàn)長度為100 m.
實(shí)驗(yàn)硬件采集系統(tǒng):海康威視DS-2CD4010FWD圖像采集器、聯(lián)想L197WA顯示器、i-Ei TANK-820工控機(jī)、科電KD65-12蓄電池、紐福克斯7962NB逆變器及信息輔助采集裝置、尼康D 90,最高分辨率4 288像素×2 848像素(見圖8(a)).
軟件系統(tǒng)采用自行編寫的基于Visual C++和OpenCV計(jì)算系統(tǒng)(見圖8(b)).
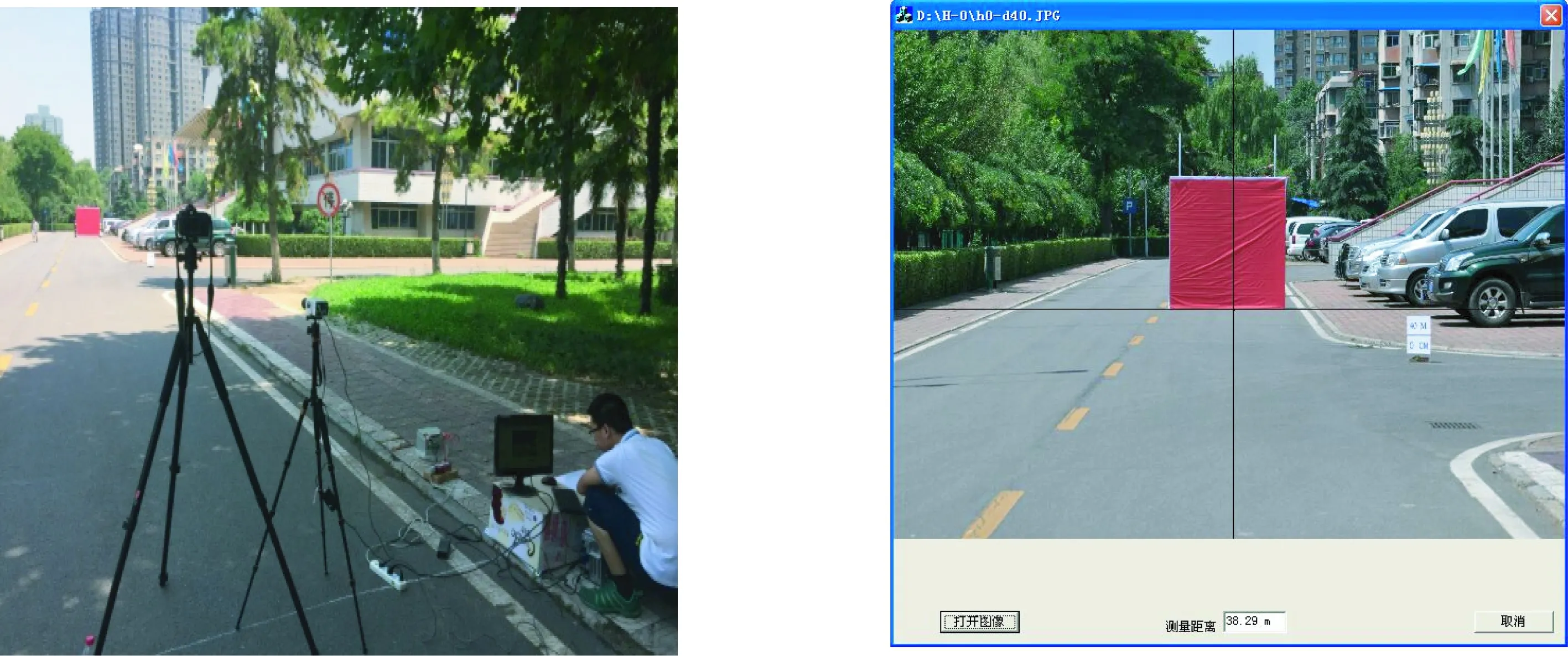
(a)信息實(shí)時(shí)采集系統(tǒng) (b)縱向安全距離實(shí)時(shí)計(jì)算系統(tǒng)
所用圖像采集設(shè)備均屬于APS-C畫幅,因此初始焦距均設(shè)定為82 mm.部分實(shí)驗(yàn)結(jié)果如圖9所示.

圖9 實(shí)驗(yàn)測定的部分結(jié)果
為說明文中給出的算法能夠有效單目視覺縱向測距精度,以文獻(xiàn)[6-7]所述算法進(jìn)行對比,結(jié)果如表1所示.

表2 測量結(jié)果對比 m
測量誤差對比如圖10所示,本文算法的相對測量誤差(Relative Error,RE)和絕對誤差(Absolute Error,AE)遠(yuǎn)遠(yuǎn)低于文獻(xiàn)[6-7].文獻(xiàn)[6]雖然在60 m之內(nèi)具有較高準(zhǔn)確性,然而大于60 m距離進(jìn)行測量的相對誤差較大.文獻(xiàn)[7]測量相對誤差隨測量距離增大而迅速增大,當(dāng)測量距離大于70 m時(shí),絕對誤差已經(jīng)遠(yuǎn)遠(yuǎn)超過20 m.這是因?yàn)樵谶M(jìn)行單目視覺測距時(shí)為覆蓋非興趣監(jiān)測區(qū)域而選擇過小的檢測焦距,在進(jìn)行高縱向圖像特征點(diǎn)坐標(biāo)逆換算時(shí)造成曲線擬合發(fā)散.
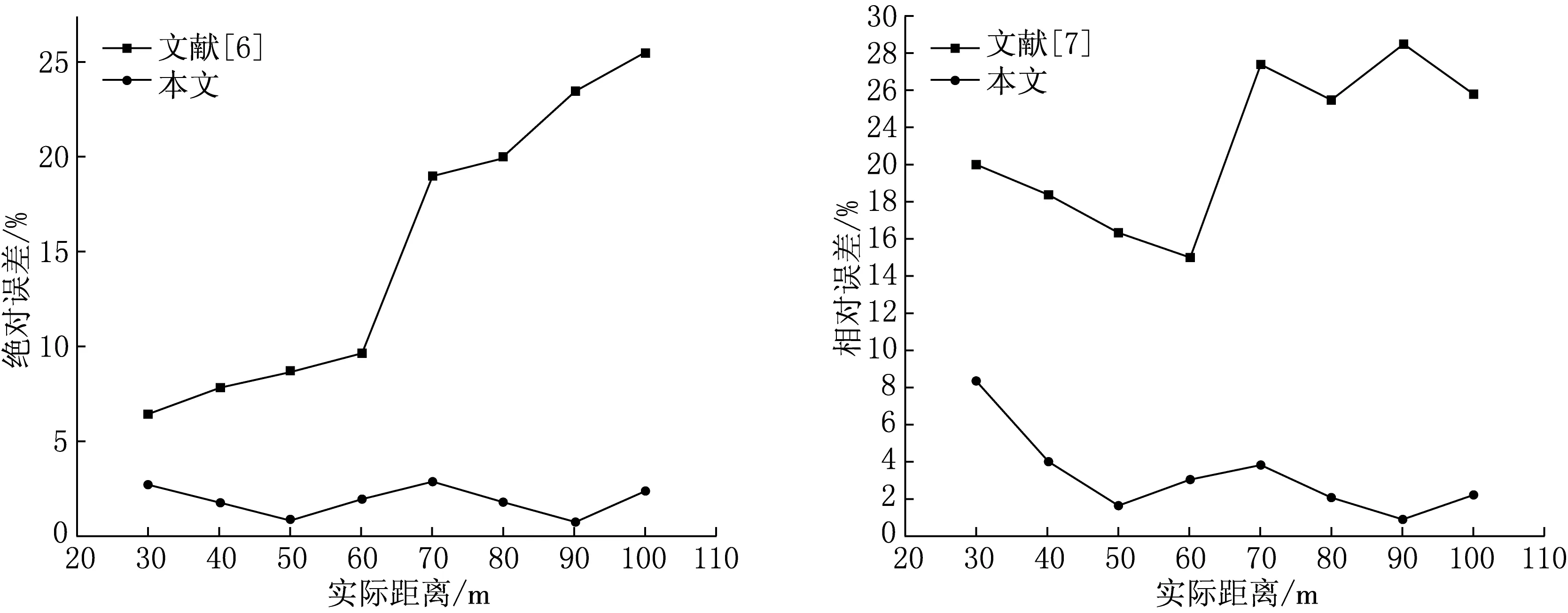
圖10 本文算法與文獻(xiàn)測量誤差的對比
4 結(jié)語
由收斂態(tài)縱向預(yù)警區(qū)域模型所得車載視覺成像設(shè)備焦距,能夠有效提高高速道路縱向行車安全距離計(jì)算精度,更加符合稀疏路網(wǎng)工況實(shí)際要求.
[參考文獻(xiàn)]
[1]劉曉鋒,常云濤,王珣.稀疏路網(wǎng)條件下的無人飛機(jī)交通監(jiān)控部署方法[J].公路交通科技,2012,29(3):124-129.
[2]WEN X,SHAO L,F(xiàn)ANG W,et al.Efficient feature selection and classification for vehicle detection[J].Ieee Transactions on Circuits & Systems for Video Technology,2015,25(3):508-517.
[3]REZAEI M,TERAUCHI M,KLETTE R.Robust vehicle detection and distance estimation under challenging lighting conditions[J].IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2723-2743.
[4]CHEN Y L,WU B F,HUANG H Y,et al.A real-time vision system for nighttime vehicle detection and traffic surveillance[J].IEEE Transactions on Industrial Electronics,2011,58(5):2030-2044.
[5]袁雨桐.基于單目視覺的智能車前方障礙物識別與測距[D].長春:吉林大學(xué),2016.
[6]郭磊,徐友春,李克強(qiáng),等.基于單目視覺的實(shí)時(shí)測距方法研究[J].中國圖象圖形學(xué)報(bào),2006,11(1):74-81.
[7]劉永濤.基于環(huán)境感知技術(shù)的客運(yùn)車輛危險(xiǎn)行駛狀態(tài)辨識技術(shù)研究[D].西安:長安大學(xué),2015.
[8]劉喜東,劉應(yīng)東.考慮轉(zhuǎn)向速度的汽車操縱穩(wěn)定性分析[J].機(jī)械工程學(xué)報(bào),2011,47(10):95-100.
[9]熊璐,陳晨,馮源.基于Carsim/Simulink聯(lián)合仿真的分布式驅(qū)動(dòng)電動(dòng)汽車建模[J].系統(tǒng)仿真學(xué)報(bào),2014,26(5):1143-1148.
[10]徐杰,杜文,孫宏.跟隨車安全距離的分析[J].交通運(yùn)輸工程學(xué)報(bào),2002,2(1):101-104.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
