高速時轉向盤角階躍工況下電動輪汽車EPS與DYC的協調控制方法
2018-04-08 10:08:19馬金麟張厚忠
重慶理工大學學報(自然科學) 2018年3期
馬金麟,吳 琦,張厚忠
(江蘇大學 a.汽車與交通工程學院; b.汽車工程研究院, 江蘇 鎮江 212013)
安全是當今汽車發展的一大主題,隨著人們對汽車操縱穩定性、行駛安全性要求的不斷提高,裝備電動助力轉向(electric power steering,EPS)與直接橫擺力矩控制(direct yaw moment control,DYC)的電動輪汽車將越來越普及。當處于高速且轉向角變化幅度大等極限工況下時,汽車可能處于失穩、側滑、轉向過多導致激轉等危險情況[1],由于車輪附著力的下降,車輛的方向控制將變得非常困難。試驗證明:在極限工況下,DYC系統的控制作用要比基于轉向的穩定性控制系統更加可靠和有效[2-3]。駕駛員對車輛進行轉向操作時就會對汽車操縱穩定性產生影響[4],特別是在高速時轉向盤角階躍工況等緊急情況下,需要加入穩定性控制。因此,利用電動輪汽車每個車輪的轉矩獨立可控、電機與輪胎響應一致等優點[5],針對高速轉向工況,對EPS與DYC的協調控制研究具有較高的研究意義。
近年來,國內外對于高速轉向工況下汽車操縱穩定性控制開展了一些研究,潘公宇等[6]通過對主動懸架系統與轉向系統集成協調控制,對高速轉向工況下汽車操縱穩定性和平順性進行研究,仿真結果表明能有效地改善高速轉向時汽車的操縱穩定性和平順性。張榮蕓等[7]以ESP和EPS為研究主體,為了避免EPS和ESP間的功能干擾與重疊,采用功能分配的方法對其進行協調控制,結果表明能明顯改善高速轉向下的汽車的操縱和側向穩定性,但沒有闡述制動力分配算法。王其東等[8]針對汽車縱向側向動力學存在的耦合因素,提出一種基于汽車行駛安全邊界的EPS與ESP協調控制策略,改善了汽車的行駛穩定性,卻沒有考慮轉向系統對汽車操縱穩定性的影響。韓國的MANDO公司提出的Unified Chassis Control(簡稱UCC)系統中,通過ESP系統檢測到的橫擺角速度和輪缸壓力反推出進行協調控制所需的橫擺力矩,再換算到轉向系統中,由EPS助力電機提供給駕駛員,輔助駕駛員進行相應的調整工作[9],但主要是針對分離系數路面制動工況。
綜上所述,國內外學者對EPS與ESP的協調控制有一定研究,但研究中的控制策略大多基于分散控制結構,其協調控制效果有限;而且對于4輪轂電機驅動汽車(簡稱為電動輪汽車)的EPS與DYC協調控制研究則更是少之又少。因此,本文基于電動輪汽車,針對高速轉向盤角階躍工況,采用分層控制結構,對EPS與DYC進行協調控制研究。
1 系統模型的建立
1.1 電動輪汽車CarSim整車動力學模型
CarSim是一款用于車輛動力學仿真分析的專業軟件,可快速預測和仿真汽車的操縱穩定性、制動性、平順性、動力性和經濟性,同時也被廣泛應用于現代汽車控制系統的開發。本文利用CarSim軟件建立電動輪汽車整車動力學模型。但是由于CarSim軟件目前尚無電動汽車這一模塊,因此本文根據電動輪汽車的特點對CarSim自帶的整車模型進行相應修改,以獲得所需的電動輪汽車整車動力學模型。其電動輪汽車的基本參數如表1所示。
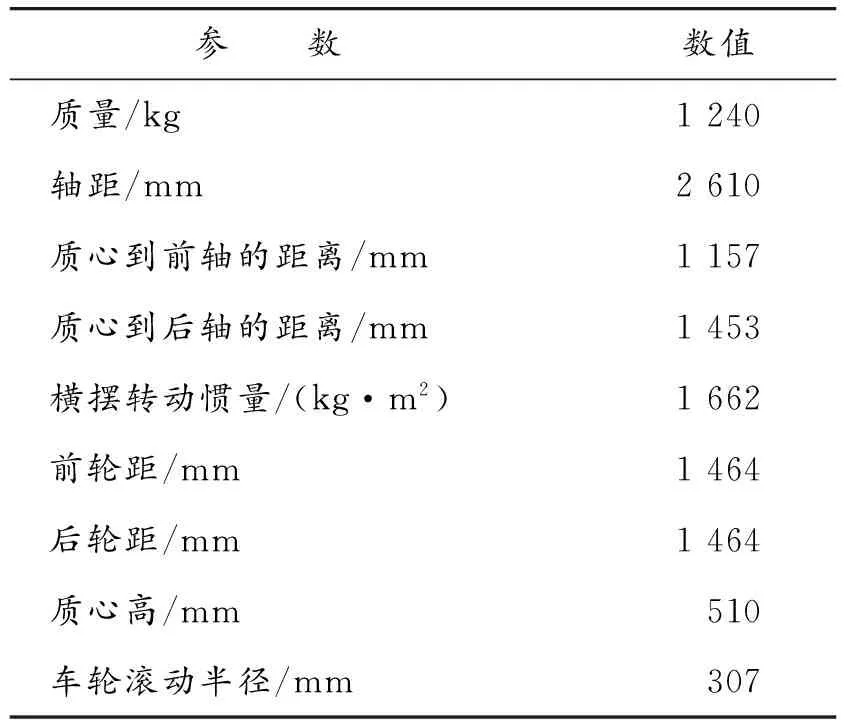
表1 電動輪汽車基本參數
電動輪汽車是由置于輪輞內的電機驅動的電動汽車,故可將輪轂電機和輪胎看做一個整體,都視為非簧載質量。因此,電動輪汽車單個輪胎的非簧載質量為40 kg,非簧載質量的轉動慣量可利用式(1)計算。
Jz=mf·r2
(1)
其中:mf為非簧載質量;r為靜載半徑(其值可用輪胎滾動半徑代替)。根據表1中參數,可以計算出非簧載質量的轉動慣量Jz為3.77 kg·m2。
電動輪汽車的動力源于裝在車輪內的輪轂電機,因此需要對CarSim中的車輛模型進行改進,將CarSim的傳動系改為四驅模式,同時將差速器改為外部差速器以中斷動力傳遞,將車輛傳動系統的部件作為簧載質量,然后將電機的輸出力矩直接加載至車輪,從而獲得基于CarSim的電動輪汽車的傳動系統仿真模型,如圖1所示。
1.2 線性二自由度理想汽車模型
駕駛員操控汽車行駛時,希望車輛參數的響應隨前輪轉角的線性變化,線性二自由度模型(圖2)是常用的汽車操縱動力學簡化模型,該模型表征了汽車操縱穩定性與橫擺角速度和質心側偏角的關系,能夠滿足駕駛員的期望,因此常作為理想汽車模型[10]。
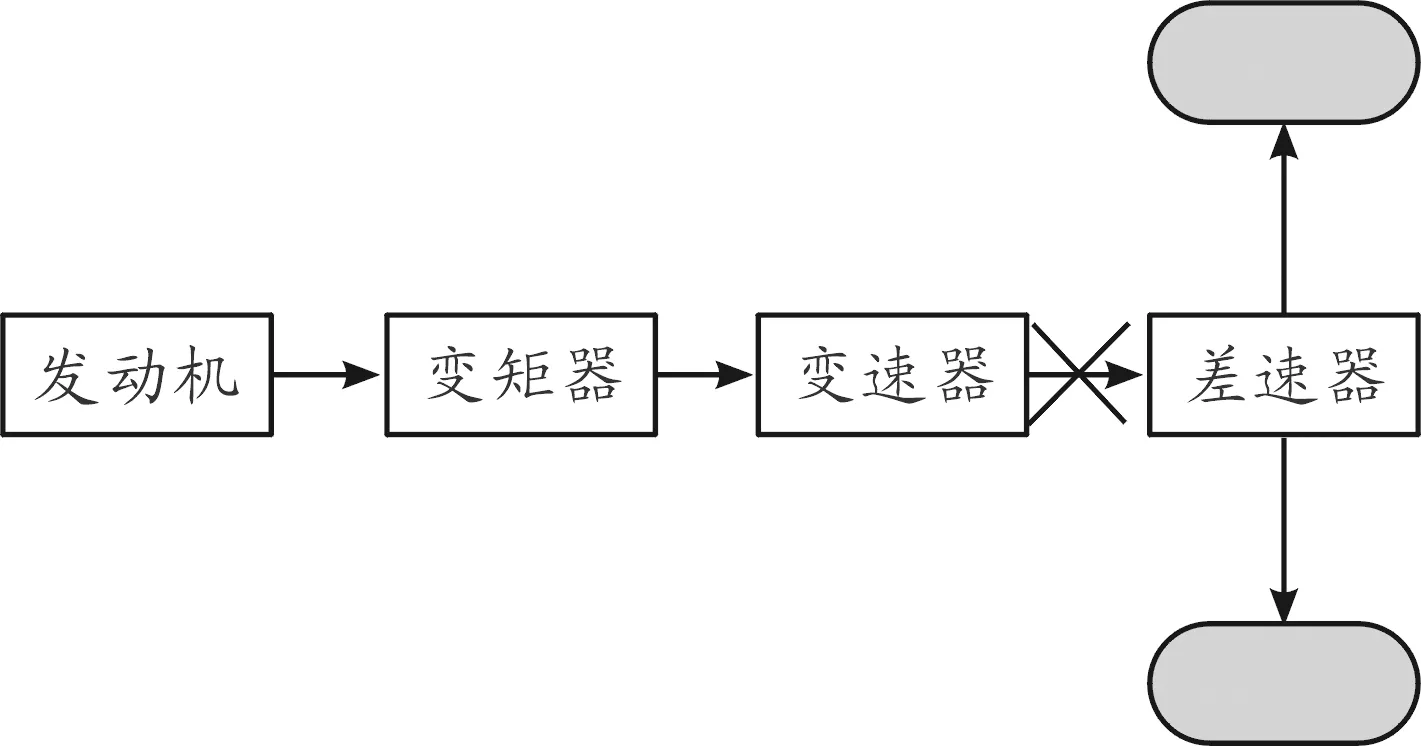
圖1 電動輪汽車傳動系統仿真模型
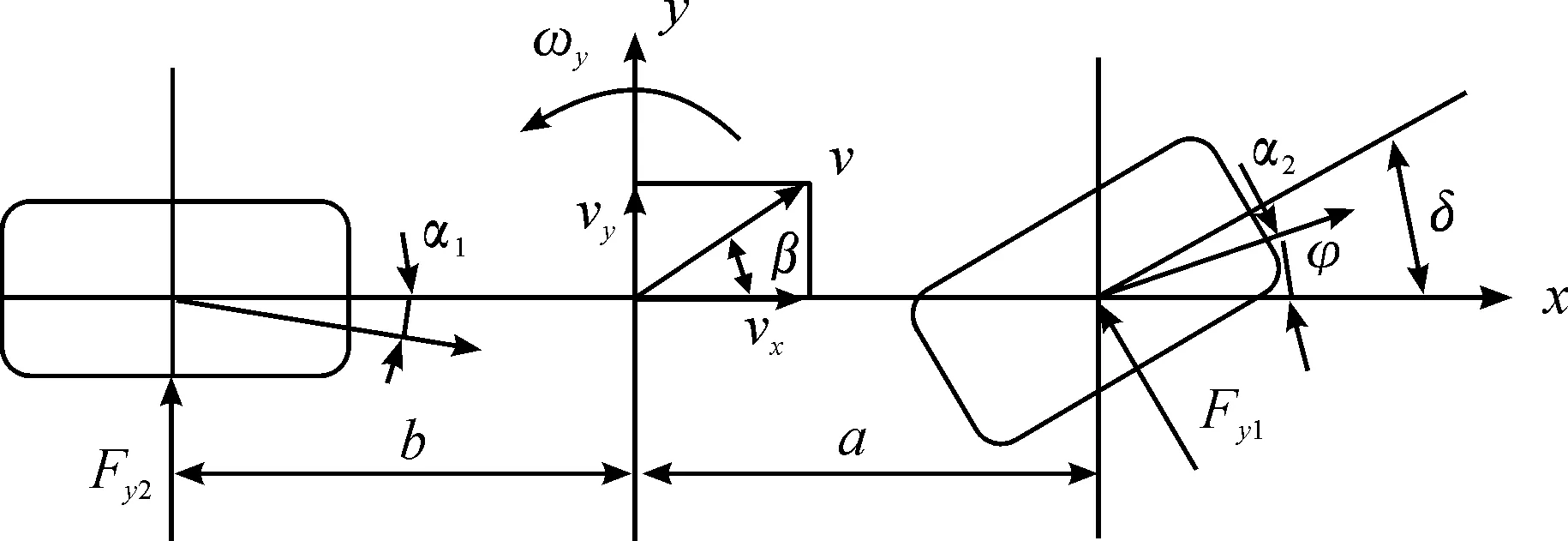
圖2 二自由度汽車模型
(2)
(3)
1.3 EPS模型
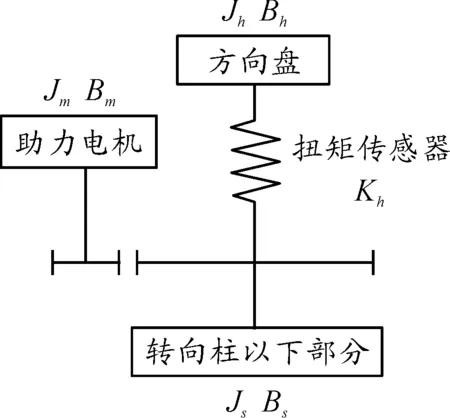
圖3 轉向系統動力學模型
本文以轉向柱式EPS為研究對象,由方向盤、助力電機、轉向柱及其以下部分組成,其動力學模型如圖3所示。
可知EPS動力學方程為
[(Js+Jm·G2)·s2+(Bs+Bm·G)·s+Kh]·θ(s)
(4)
其中:Kh轉向柱的扭桿剛度;θh為方向盤轉角;Tm為電機輸出力矩;G為電機到轉向柱蝸輪蝸桿的傳動比;Tf為轉向機構固有摩擦;Js、Bs為轉向柱外部分擬合為轉向柱的轉動慣量和阻尼;Jm、Bm為電機的轉動慣量與阻尼。
2 EPS與DYC協調控制器設計
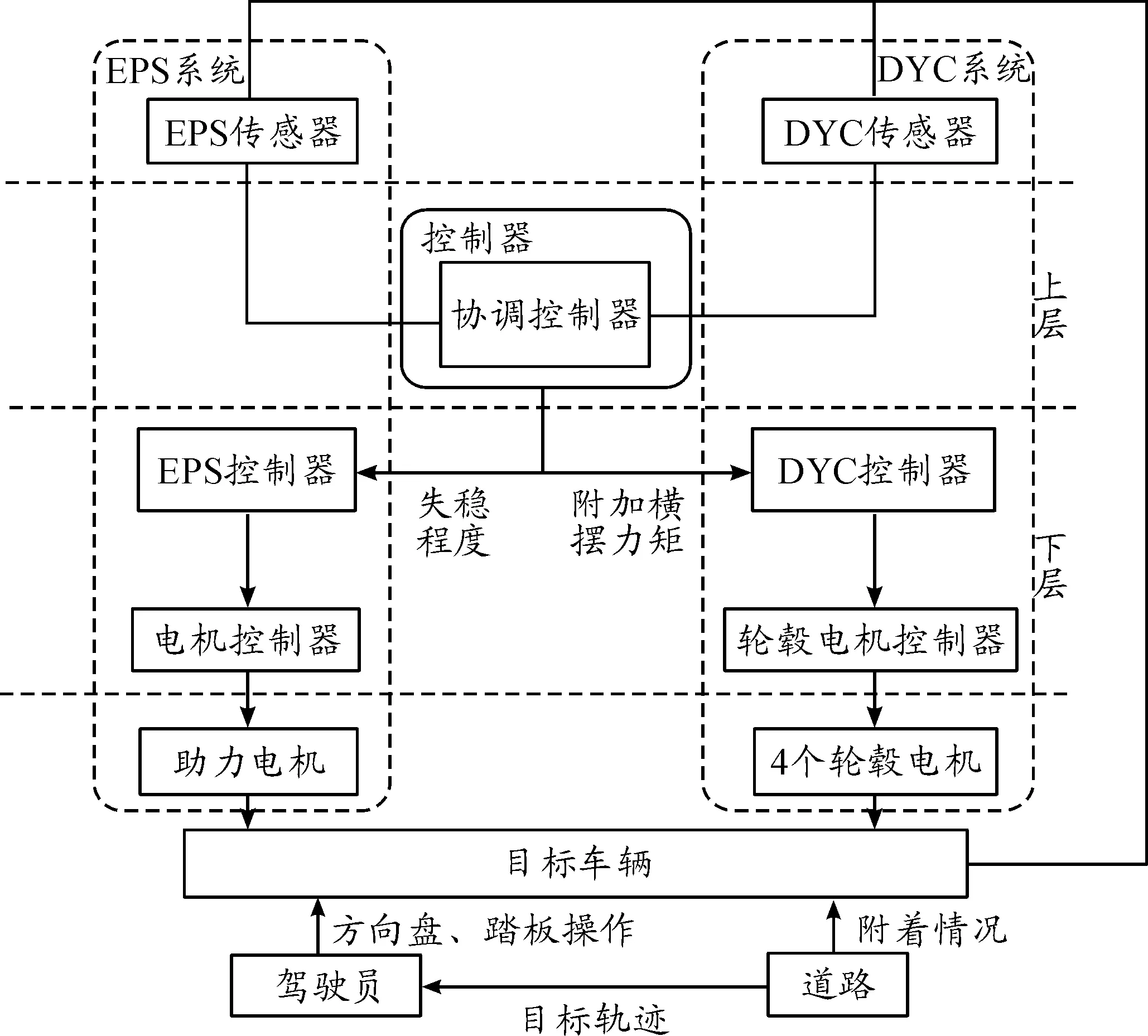
圖4 協調控制框圖
為了減小EPS與DYC所控制的汽車運動相互影響的程度,避免EPS與DYC協調控制過程中出現功能干擾和重疊,本文以現有研究為基礎,基于電動汽車平臺,以EPS、DYC控制系統為研究對象,從信息融合共享、子系統協調控制、單系統功能優化3個層面進行分析,采用分層控制理論,提出基于電動汽車EPS與DYC的協調控制方法,如圖4所示。
圖4中:上層為EPS與DYC協調控制器,通過EPS與DYC的傳感器獲取汽車行駛狀態,包括車速ν、前輪轉角δ、橫擺角速度ωr、質心側偏角β等,結合線性二自由度理想汽車模型,計算出期望橫擺角速度與質心側偏角的參考值ωrd、βd;根據特征參數判斷汽車當前運動姿態,計算出汽車失穩程度e=ωrd-ωr及維持車輛穩定行駛所需附加橫擺力矩ΔM,并將信息分別發送到下層2個子系統,子系統輸出當前維持車輛行駛穩定的期望值。
2.1 上層協調控制器設計
2.1.1工況識別及狀態分析
在上層協調控制器中的駕駛員操作及工況識別模塊中,通過車速傳感器檢測得到車速ν,及通過方向盤轉角傳感器換算得到前輪轉角δ,若車速ν≥νs、前輪轉角δ≥δs(其中νs、δs均為控制策略中設定的門限值),則判別此時工況為高速大轉向工況。
駕駛員在進行轉向操作時,開始各個車輪側偏角較小,側偏力與側偏角處于線性范圍內,車輛響應與駕駛員期望一致,DYC系統處于無控制狀態。隨著駕駛員繼續進行轉向操作,輪胎的側偏特性進入非線性區域,協調控制器通過線性二自由度理想汽車模型計算的期望橫擺角速度與質心側偏角與實際值相差逐漸增大,DYC系統進入控制模式,產生一個附加橫擺力矩,使實際橫擺角速度與質心側偏角逼近期望值。隨著方向盤轉角的繼續增加及DYC繼續工作,電動汽車各個輪胎的輪胎力得到充分利用并達到飽和,若此時繼續增加方向盤轉角,考慮到路面附著極限,DYC控制下車輛的實際橫擺角速度將不再增加。對于整個控制過程,EPS與DYC系統協調控制分析如表2所示。
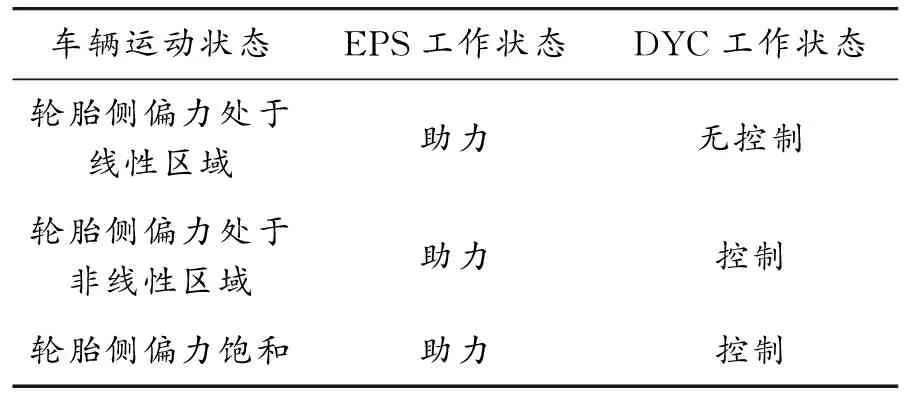
表2 高速大轉向工況協調控制分析
基于以上分析,應盡量避免電動汽車各個車輪輪胎側偏力處于飽和狀態,當電動汽車輪胎側偏力接近飽和狀態時,應適量減小EPS提供的轉向助力力矩,增加方向盤操作的轉向難度,使駕駛員不易進行轉向操作。
2.1.2駕駛員操作識別
從傳感器信號中獲取電動汽車的實際橫擺角速度ωr,從線性二自由度理想汽車模型中得出期望橫擺角速度ωrd,兩者進行對比,并定義:
(5)
通過比較ε與dε的大小與方向,從而判斷駕駛員是否為正常操作。當判別駕駛員為誤操作時,指導EPS控制器對助力力矩進行調整。當ε與dε同號時,說明ε為增大趨勢,期望橫擺角速度與實際橫擺角速度差不斷擴大,此時DYC控制為制動轉向狀態,以縮小期望橫擺角速度與實際橫擺角速度的差異。因此,ε的絕對值增大主要是由于在高速大轉向操作時駕駛員快速打方向盤的操作,導致期望橫擺角速度迅速增大,此時駕駛員為過激操作,應減小EPS助力力矩,增加轉向難度,減小駕駛員誤操作程度。當ε與dε異號時,說明ε為減小趨勢,實際橫擺角速度能夠很好地跟隨期望橫擺角速度,此時認為駕駛員正在進行正常轉向,為正常操作。
2.1.3附加橫擺力矩計算
為了使實際的橫擺角速度和質心側偏角很好地跟隨橫擺角速度和質心側偏角的理想值,則滑模面方程為
s=μ(ωrd-ωr)+ξ(βd-βr)
(6)
其中:ωrd為期望橫擺角速度;ωr為實際橫擺角速度;βd為期望質心側偏角;βr為實際質心側偏角;μ、ξ為調節參數,其大小值決定橫擺角速度和質心側偏角產生附加橫擺力矩的比例,可根據不同行駛工況進行調整。
根據式(6)可得
(7)
滑模控制一般由等效控制ueq和監督控制ur構成[11],其中ueq保證系統在滑模面上運動,ur使系統趨向于滑模面的運動,所以
u=ueq+ur
(8)
(9)
式中ueq=ΔM,則
(10)

(11)
將式(9)(10)代入式(6),經整理得
(12)
為了抑制滑模控制的抖振現象,本文設計的監督控制ur采用等速趨近律控制,則監督控制ur為:
ur=-k·sgn(s)
(13)
則:
(14)
式中μ、ξ、k均為可調參數。所以,采用等速控制和趨近律控制相結合的控制方法得到的基于橫擺角速度與質心側偏角的聯合滑模變結構控制Matlab/Simulink仿真模型如圖5所示,由此可以計算出所需附加橫擺力矩的大小。
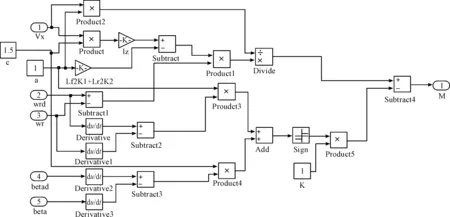
圖5 附加橫擺力矩大小計算模型
2.2 EPS控制算法優化
當汽車處于高速時大轉向角階躍工況下時,由于駕駛員的過激操作,導致實際橫擺角速度與期望橫擺角速度差異太大,汽車處于失穩狀態。一方面,DYC系統處于控制模式,協調電動汽車4個輪胎的縱向力分配,產生一個附加橫擺力矩,維持車輛穩定;另一方面,協調控制器通過所需附加橫擺力矩大小修正EPS助力力矩,由EPS助力電機輔助駕駛員進行相應調整,提高電動汽車的行駛安全性,其控制策略如圖6所示。
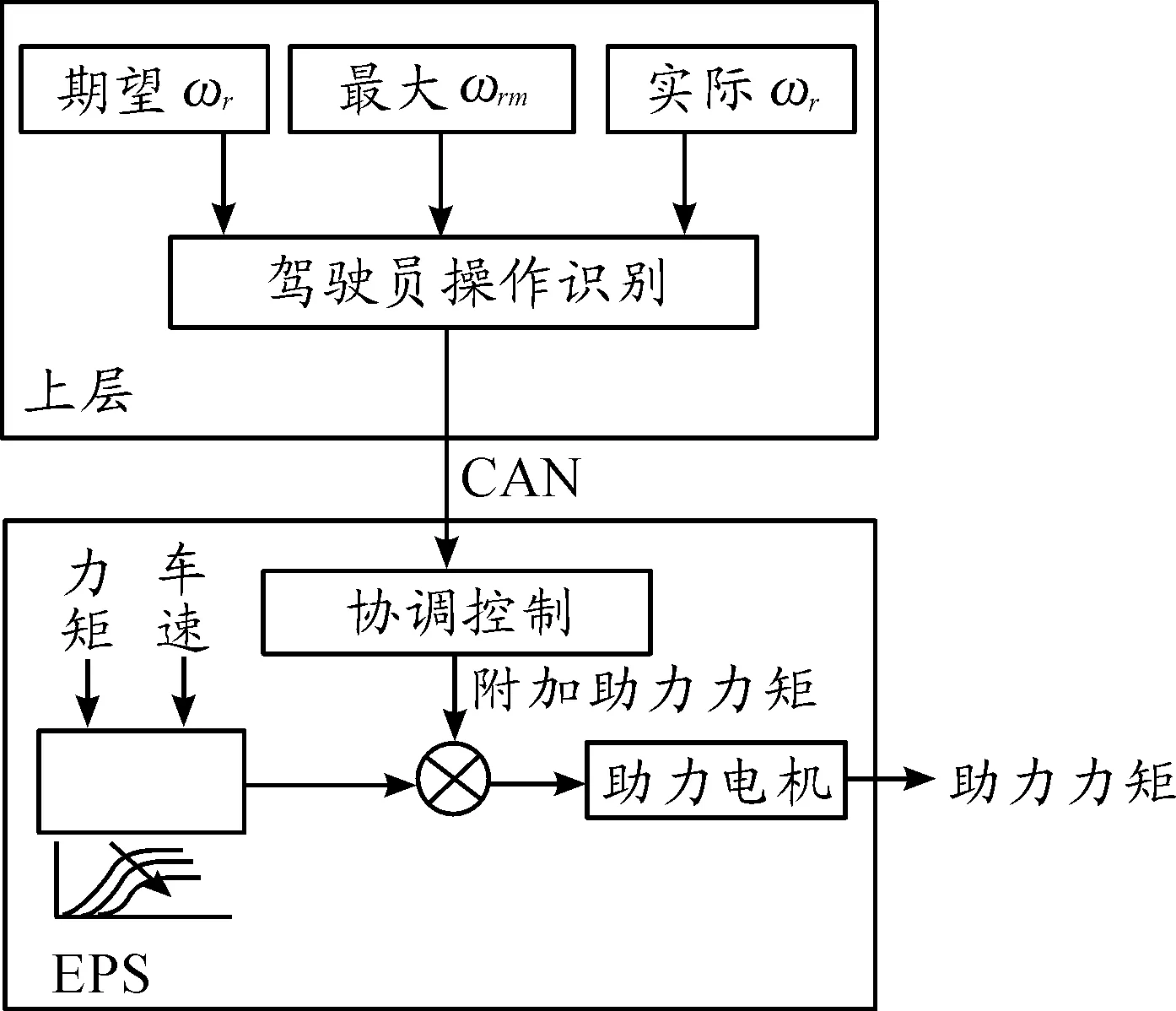
圖6 EPS控制優化策略
在上層,協調控制器通過CAN連接傳遞信息給下層EPS,修正EPS助力電機提供的轉向助力矩,輔助駕駛員方向盤操作,削弱因駕駛員打方向盤過激和過度導致電動汽車處于嚴重失穩狀態。根據本文對駕駛員操作的識別,針對高速時大轉向角階躍工況,協調控制命令制定時可以基于公式形式,協調控制的權重系數K可用如下函數表示:
(15)
式中:ωrd為期望橫擺角速度;ωrMax為基于路面附著極限最大橫擺角速度;K1、K2為協調控制門限值,令K1=0.7,K2=1。采用上述方法可得修正后的EPS助力力矩TE=K·Te(Te為EPS修訂前助力力矩)。當判定駕駛員操作為誤操作時,權重系數K=0,此時EPS將不提供助力力矩,從而避免車高速時大轉向角階躍車輛行駛安全性及操縱穩定性的進一步惡化。
2.3 DYC控制器設計
通過上層協調控制器可以得出維持車輛穩定行駛所需的附加橫擺力矩,將所需附加橫擺角力矩下傳至下層DYC控制器,通過DYC控制器及縱向力分配算法,將縱向力分配到各個輪轂電機,從而產生所需的附加橫擺力矩以維持電動汽車的穩定行駛。
目前,電動輪汽車驅動力分配控制算法有3類:線性分配、動態分配、優化分配。線性分配算法包括直接分配法、鏈式遞增法、系數PI調節法、偽逆法等。動態分配法是考慮輪轂電機和被控系統車輛響應頻率接近時的一種分配算法,主要有基于模型預測的控制分配算法[12]。優化分配算法有最小二乘算法、廣義逆法、線性規劃法。本文采用軸載比例分配算法,即4輪驅動力矩按軸載比例進行分配,以前、后輪的軸載估計值分配比例控制各軸總的驅動力與橫擺力矩。前、后軸載的估計值的確定方法為:
(16)
式中:Fzf、Fzr分別為前、后軸垂直載荷;hg為整車質心高度;ax為質心縱向加速度。
在采用軸載比例分配算法時,其各輪的縱向力在滿足總縱向力和橫擺力矩需求的同時還應滿足下列條件:
(17)
由式(16)(17)可求出4個車輪縱向力的值:
(18)
最后,根據|Fxi|≤min(Fm,μFzi),i=1、2、3、4,得到優化后的4輪縱向力。
3 仿真與分析
本文利用CarSim軟件建立電動輪汽車的整車動力學模型,利用Matlab/Simulink建立整車的EPS/DYC協調控制模型,將兩模型聯合后通過聯合仿真對高速大轉向下電動輪汽車EPS與DYC的協調控制方法進行驗證。仿真工況如下:初始車速設為100 km/h,路面附著系數設為0.7,方向盤階躍輸入如圖7所示,滑模變結構控制器的3個調節參數μ、ξ、k經調試后分別設為50、20、11。仿真結果如圖8~11所示。
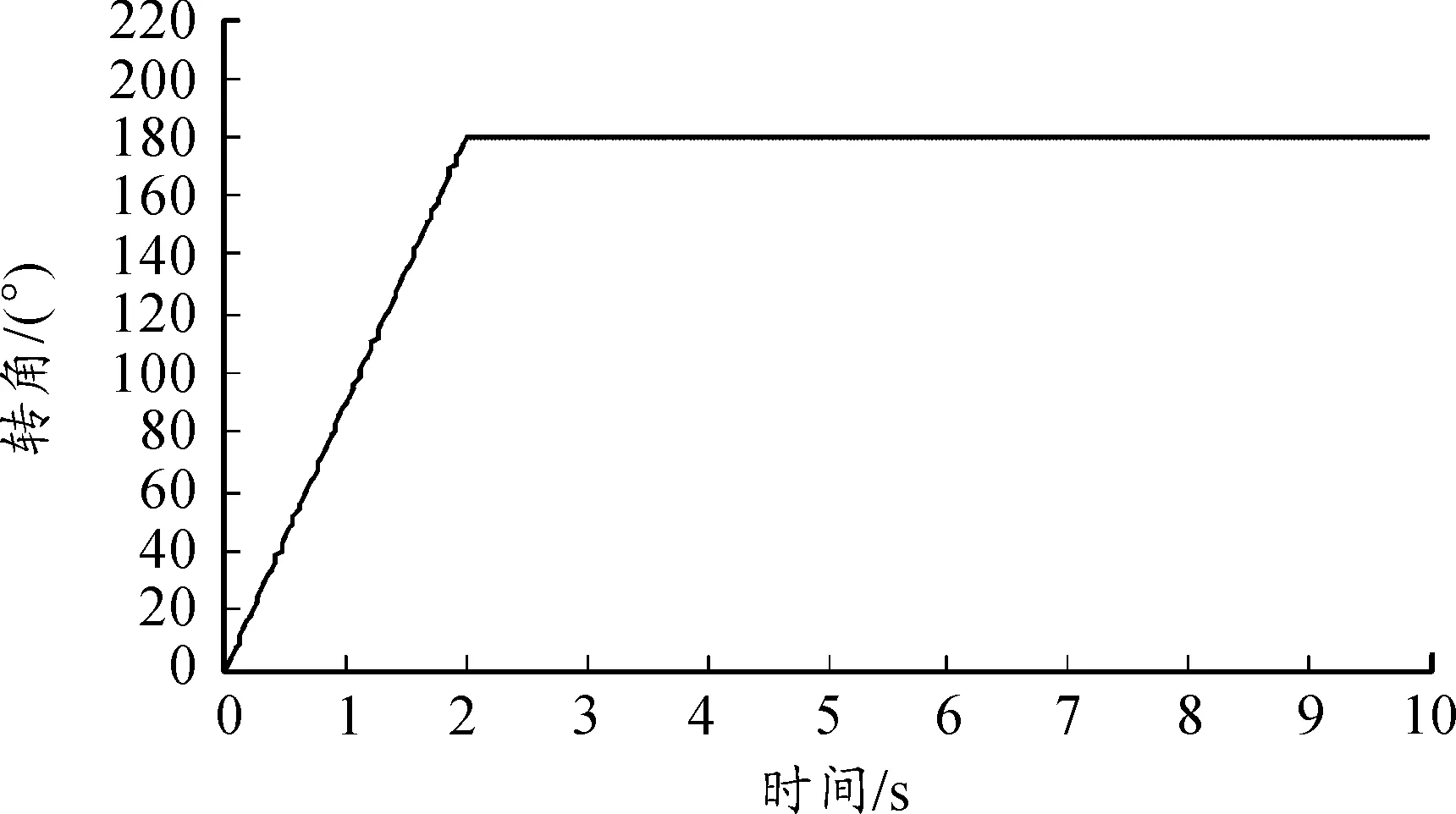
圖7 方向盤角階躍輸入
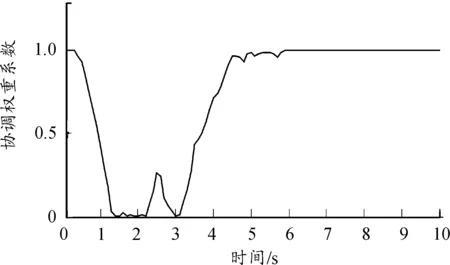
圖9 協調權重系數
圖8為前輪轉向角曲線。由圖8可見:無協調控制的電動汽車在高速大轉向工況下,其前輪轉角保持快速上升并在2 s左右達到最大值,之后維持大轉向角不變;協調控制下的電動汽車前輪轉角較于EPS單獨控制要小,說明提出的EPS控制優化設計能有效消弱駕駛員高速大轉向時對方向盤的快速轉向能力。圖9為協調權重系數曲線,由圖9可知:由于駕駛員對方向盤的過激操作,使協調權重系數K快速減小,在1.4~3.5 s之間保持在低數值狀態,此時EPS提供少量助力或不提供助力,增加駕駛員的轉向難度。
圖10、11分別為高速時轉向盤角階躍工況下橫擺角速度和側向加速度的對比曲線。由圖10可以看出:ESC控制及協調控制能很好地維持車輛的操縱穩定性,較ESC協調控制效果更好,說明將橫擺角速度反饋給EPS系統,引入的協調權重系數能更好地改善汽車的操縱穩定性,有效減小高速時轉向盤角階躍工況下的橫擺角速度的超調和振蕩。從圖11可以得出:協調控制下的側向加速度較于無控制和ESC控制均要小,能明顯減少電動汽車在高速時轉向盤角階躍工況下出現側滑或側翻的危險性。
4 結束語
為保證電動輪汽車在高速時大轉向角階躍工況下的操縱穩定性,本文提出一種基于分層監督控制的EPS與DYC協調控制策略,根據引入的協調權重系數函數對EPS轉向助力矩進行適當修正,通過削弱駕駛員的轉向能力,防止由于轉向過多造成的危險情況的發生,可有效地減小高速時大轉向盤角階躍工況下的橫擺角速度的超調和振蕩。聯合仿真結果表明:本文所提出的EPS與DYC協調控制策略,可顯著提高電動輪汽車在高速時轉向盤角階躍工況下的操縱穩定性和側向穩定性,其協調控制方法將為電動輪汽車底盤集成控制提供新思路。
參考文獻:
[1]LI B,YU F.Design of a vehicle lateral stability control system via a fuzzy logic control approach[J].Proceedingsof the Institution of Mechanical Engineers.Part D:Journal of Automobile Engineers,2010,224(3):313-326.
[2]陳禹行.布式驅動電動汽車直接橫擺力矩研究[D].長春:吉林大學,2013.
[3]杜尚謙.直接橫擺力矩與四輪轉向集成控制研究[D].上海:上海交通大學,2009.
[4]祁永寧,陳南,李普.四輪轉向車輛的直接橫擺力矩控制[J].東南大學學報(自然科學版),2004,34(4):451-454.
[5]MITCHELL W J,BORRONI-BIRD C E,BURNS L D.Reinventing the automobile:personal urban mobility for the 21st century[M].Cambridge:The MIT Press,2010.
[6]潘公宇,張明梅.高速轉向工況下汽車操縱穩定性和平順性研究[J].廣西大學學報(自然科學版),2016,41(3):674-683.
[7]張榮蕓,黃鶴,陳無畏,等.基于功能分配與多目標模糊決策的EPS和ESP協調控制[J].機械工程學報,2014,50(6):99-106.
[8]王其東,王金波,陳無畏,等.基于汽車行駛安全邊界的EPS與ESP協調控制策略[J].機械工程學報,2016,52(6):99-107.
[9]YOON J,CHO W,YI K,et al.Unified chassis control for vehicle rollover prevention[J].Ifac Proceedings Volumes,2008,41(2):5682-5687.
[10] 余志生.汽車理論[M].5版.北京:機械工業出版社,2011.
[11] 張昌凡,何靜.滑模變結構的智能控制理論與應用研究[M].北京:科學出版社,2005.
[12] 范晶晶,鄒廣才.基于 DYC 的四輪驅動電傳動車輛動力學控制系統研究[J].車輛與動力技術,2009(1):1-6.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車電器(2018年1期)2018-06-05 01:22:54
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
軍事歷史(1985年2期)1985-01-18 07:39:33
