基于V2G充電樁系統(tǒng)DC—DC變換器控制策略的研究
2018-04-29 07:54:37余帥劉勝永崔志鵬曹括周冀龍
廣西科技大學(xué)學(xué)報 2018年1期
余帥 劉勝永 崔志鵬 曹括 周冀龍
摘 要:V2G系統(tǒng)中,對鋰電池充放電比較頻繁,鋰電池的充電電壓、電流值對鋰電池的充電速度及其使用壽命有很大影響.針對V2G系統(tǒng)傳統(tǒng)的DC-DC變換器控制策略雖能實(shí)現(xiàn)對鋰電池的充電,其對鋰電池充電時,響應(yīng)的電壓、電流值達(dá)到穩(wěn)態(tài)值較慢、穩(wěn)態(tài)誤差較大,以致存在大大增加充電時間、降低鋰電池的使用壽命等缺點(diǎn),提出了一種對DC-DC變換器的模糊PI控制策略,該策略通過模糊控制可對PI參數(shù)進(jìn)行整定,以減小穩(wěn)態(tài)誤差,縮短充電電壓、電流值達(dá)到穩(wěn)態(tài)所用的調(diào)節(jié)時間,從而提高鋰電池的使用壽命、在電網(wǎng)負(fù)荷較小時能夠?qū)⒏嚯娔軆Υ嬖阡囯姵刂校筕2G系統(tǒng)更好地實(shí)現(xiàn)移峰填谷、節(jié)約資源.實(shí)驗(yàn)結(jié)果表明,該策略能夠有效減小鋰電池充放電的穩(wěn)態(tài)誤差及達(dá)到穩(wěn)態(tài)值所用調(diào)節(jié)時間.
關(guān)鍵詞:V2G充電樁;DC-DC變換器;模糊PI控制
中圖分類號:TM76 DOI:10.16375/j.cnki.cn45-1395/t.2018.01.012
0 引言
Vehicle-to-grid(V2G)系統(tǒng)能夠?qū)崿F(xiàn)電動汽車與電網(wǎng)之間的互動,它既能實(shí)現(xiàn)電網(wǎng)的移峰填谷,減小電網(wǎng)的建設(shè)投資,又能降低電動汽車的使用成本[1].V2G系統(tǒng)的核心思想是實(shí)現(xiàn)電動汽車與電網(wǎng)之間的電能互動,當(dāng)電網(wǎng)負(fù)荷較小時,通過電動汽車儲存過剩的電能;當(dāng)電網(wǎng)負(fù)荷較大時,可通過電動汽車儲存的電能反饋于電網(wǎng).它在電力系統(tǒng)的調(diào)節(jié)峰值功率、削峰填谷等方面有很強(qiáng)的優(yōu)勢[1].電網(wǎng)的負(fù)荷在不斷發(fā)生變化, V2G系統(tǒng)中的鋰電池會進(jìn)行頻繁地充放電,所以,對鋰電池充電時,既需要充電快速,使電網(wǎng)過剩電能可以更多儲存于鋰電池,又需要充電過程對鋰電池使用壽命損耗小,從而節(jié)約資源,提高V2G系統(tǒng)調(diào)節(jié)電網(wǎng)能力.文獻(xiàn)[2]分析了溫度、充放電電流、充放電截止電壓等因素對電池壽命的影響;文獻(xiàn)[3]中介紹了當(dāng)今的鋰電池的各種充電方法都以最佳充電曲線作為基礎(chǔ)來展開的,最佳充電曲線描述了隨著充電進(jìn)行,最佳充電電流呈現(xiàn)指數(shù)下降的趨勢.在充電過程中,若是充電電流高出最佳充電電流曲線,不但無法提高充電速度,反而會使電池溫度升高,損耗電池壽命;若是充電電流低于此最佳充電曲線,雖然不會對電池構(gòu)成損傷,但由于充電電流降低,會降慢電池充電速度.以此,不管通過何種充電方式,都需要DC-DC變換器輸出的充電電壓、電流值調(diào)節(jié)速度快且精確,不然勢必降低鋰電池充電速度及鋰電池的使用壽命.文獻(xiàn)[4-5]中的DC-DC變換器都采用的傳統(tǒng)PI控制策略,其PI值固定,在充電電壓、電流需要改變時,其響應(yīng)速度比較慢、穩(wěn)態(tài)誤差也較大.
本文結(jié)合V2G系統(tǒng)及鋰電池充放電等特點(diǎn),選取了一種能夠?qū)崿F(xiàn)電能雙向流動的電路拓?fù)浣Y(jié)構(gòu),設(shè)計了一種模糊PI控制策略.該控制策略與傳統(tǒng)PI控制策略相比,能夠通過模糊控制對PI參數(shù)進(jìn)行整定,從而縮短充電電壓調(diào)節(jié)時間、減小穩(wěn)態(tài)誤差,提高了DC-DC變換器對鋰電池的充電速度,降低了對鋰電池的損耗,增強(qiáng)了V2G系統(tǒng)節(jié)約資源、調(diào)節(jié)電網(wǎng)的能力.
1 DC-DC變換器拓?fù)浣Y(jié)構(gòu)選擇及其工作原理分析
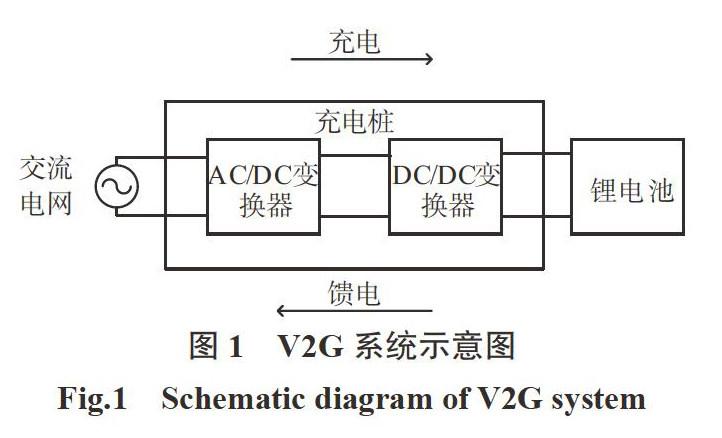
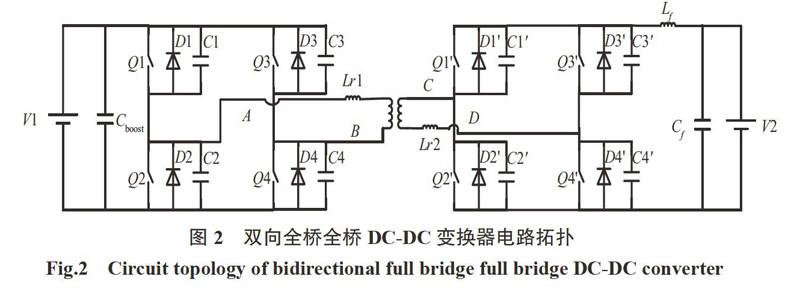
V2G系統(tǒng)示意圖如圖1所示,當(dāng)電網(wǎng)負(fù)荷較小時,電網(wǎng)把過剩的電能通過充電樁儲存在電動汽車鋰電池中;當(dāng)負(fù)荷較大時,鋰電池中存儲的電能可以通過充電樁反饋到電網(wǎng).充電樁要能夠?qū)崿F(xiàn)電能雙向流動,一般鋰電池充電電壓至少在110 V~500 V,電流在1 A~200 A,結(jié)合V2G系統(tǒng)充電樁以上特點(diǎn),本文選用雙向全橋DC-DC變換器拓?fù)浣Y(jié)構(gòu),其適用于中大功率且具有電氣隔離.當(dāng)電網(wǎng)負(fù)荷較小時,變換器工作在移相全橋拓?fù)浣Y(jié)構(gòu),對鋰電池進(jìn)行充電,可通過控制移相角大小來控制其輸出電壓.當(dāng)電網(wǎng)負(fù)荷過大時,變換器工作在全橋Boost結(jié)構(gòu),通過控制占空比控制其輸出電壓.拓?fù)浣Y(jié)構(gòu)如圖2所示. V1表示拓?fù)涔ぷ髟谡虺潆姇r,DC-DC變換器的輸入電壓;V2表示拓?fù)涔ぷ髟陴侂姇r,鋰電池向DC-DC變換器輸入的電壓.
移相全橋部分工作波形圖如圖3所示,其中ip為原邊電流,ilf為副邊電感電流,VAB為變壓器原邊電壓,V0為副邊整流輸出電壓,Vcn(n =1, …, 4)表示電容電壓,T為開關(guān)周期,td為開關(guān)管之間的死區(qū)時間,d為占空比,φ為移相角,deff表示有效占空比,dloss表示占空比丟失所占半個周期的比例.
由于開關(guān)周期的對稱性,這里只對t0~t6時間段進(jìn)行分析,t0時刻,ilf下降到最小值,ip通過變壓器向負(fù)載鋰電池供電.t1時刻,開關(guān)管Q1關(guān)斷,ip向電容C1充電并使C2放電.由于C1和C2,Q1為零電壓關(guān)斷. t2時刻,C2電壓下降到0,Q2零電壓導(dǎo)通. t3時刻,Q4關(guān)斷,ip轉(zhuǎn)移到C3和C4支路,使C3放電并使C4充電,Q4為零電壓關(guān)斷. t4時刻,C3電壓下降到0,Q3零電壓導(dǎo)通,整流二極管D2導(dǎo)通. t5時刻,ip下降到0. t6時刻,ip足以提供負(fù)載電流, D5,D8截至,電路開始進(jìn)入下半個周期.其中陰影部分表示由于變壓器漏感的作用,原邊不足以提供負(fù)載電流、負(fù)載處于續(xù)流狀態(tài)的持續(xù),導(dǎo)致副邊整流電壓丟失[6].
由其工作過程,取電感電流ilf和電容電壓Vcf為狀態(tài)變量,可得其分段線性狀態(tài)方程[7]:
3 DC-DC變換器的控制策略設(shè)計
3.1 模糊PI控制策略
DC-DC變換器的后級是電動汽車的鋰電池,當(dāng)電網(wǎng)負(fù)荷較大,電網(wǎng)對鋰電池充電,變換器輸出電壓值要做到可控,選用傳統(tǒng)閉環(huán)PI控制,可實(shí)現(xiàn)輸出電壓可控.傳統(tǒng)PI控制系統(tǒng)通過設(shè)定PI值來減小誤差偏差,但由于PI值固定,其輸出電壓的調(diào)節(jié)時間較長,穩(wěn)態(tài)誤差亦有可能較大.
為使輸出直流電壓與理想輸出電壓值更加接近,達(dá)到穩(wěn)定時間更短,可以加入模糊控制算法對PI參數(shù)進(jìn)行實(shí)時整定,控制系統(tǒng)框圖如圖5所示. 此模糊PI控制系統(tǒng),控制量是移相角φ、輸出量為副邊整流電壓V0,主要通過對實(shí)際輸出電壓與理想電壓的差值來對PI參數(shù)進(jìn)行整定,差值較大時,可以通過模糊控制來適當(dāng)?shù)膶值增大;差值較小時,適當(dāng)減小P值. 當(dāng)差值變化率減小時,通過模糊控制適當(dāng)減小I值;差值變化率增大時,適當(dāng)增大I值,從而使前級移相角的調(diào)整更加有利于輸出理想電壓. 此控制策略輸出電壓較傳統(tǒng)PI控制達(dá)到穩(wěn)定時所用時間更短,輸出的穩(wěn)定電壓值更加理想.
3.2 模糊PI控制器設(shè)計
本文模糊PI控制系統(tǒng)是建立在PI控制的基礎(chǔ)上,模糊控制部分是通過輸出電壓與理想電壓的差值與差值變化率來決定模糊控制的輸入輸出變量.對其模糊語言變量及其隸屬函數(shù)進(jìn)行設(shè)計:設(shè)輸入變量E,ED及輸出變量△P,△I的模糊子集都為{NA,NB,NC,OA,PA,PB,PC}.E的子集區(qū)間由所需充電電壓的范圍來確定,ED的子集區(qū)間與E子集區(qū)間按照一定的比例關(guān)系確定;△P,△I的模糊子集區(qū)間由原始PI參數(shù)值按照一定比例確定.通過多次試驗(yàn)結(jié)合理論經(jīng)驗(yàn),設(shè)計出△P,△I的模糊規(guī)則,如表1、表2所示.
4 仿真實(shí)驗(yàn)驗(yàn)證與結(jié)果分析
4.1 變換器參數(shù)設(shè)計
針對正向充電的移相全橋ZVS過程及模糊PI控制算法,結(jié)合V2G系統(tǒng)及鋰電池相關(guān)信息,設(shè)計參數(shù)如下:輸入直流電壓V1=309 V,鋰電池充電電壓范圍在0~260 V,變壓器變比n=1,電感電流范圍在0 ~10 A,開關(guān)頻率fs=20 kHz,漏感值Lr=40 μH,電感Lf =47 μH,鋰電池阻值R=0.1 Ω,電感阻值RL=0.27 Ω,電容阻值RC =0.2 Ω,饋電時整流輸出電壓Vf . 根據(jù)式(3)可以得到具體的移相全橋ZVS的傳遞函數(shù). 模糊控制部分,各語言變量論域設(shè)計為:E ={-2.7,-1.8,-0.9,0,0.9,1.8,2.7},ED ={-0.000 3, -0.000 2,-0.000 1,
0,0.000 1,0.000 2,0.000 3},ΔP={-0.001 0,-0.000 6,-0.000 3,0,0.000 3,0.000 6,1.000 0},ΔI={-0.000 10,-0.000 06,-0.000 03,0,0.000 03,0.000 06,0.000 10}.各模糊子集均采用連續(xù)型三角函數(shù).仿真中,可以改變理想電壓值的大小,來實(shí)現(xiàn)不同的充電策略,但不論何種充電策略,對電壓、電流的調(diào)節(jié)時間及準(zhǔn)確值都有很高要求.
4.2 雙向DC-DC變換器仿真實(shí)驗(yàn)
結(jié)合上面給定參數(shù)及模糊PI控制規(guī)則,建立仿真模型,當(dāng)電網(wǎng)負(fù)荷比較大時,電網(wǎng)對電動汽車充電,采用260 V恒壓充電時,可得出在PI控制下的輸出波形圖與在模糊PI控制下的輸出直流電壓波形圖,圖6為PI控制輸出V0波形圖,圖7為模糊PI控制輸出V0波形圖, PI控制、模糊PI控制都可以使其輸出穩(wěn)態(tài)誤差逐漸減小,但由于模糊PI控制可以整定P,I值所以模糊PI控制輸出電壓響應(yīng)更快,實(shí)時充電電壓更接近理想電壓值,消除穩(wěn)態(tài)誤差速度也更快. 由圖6、圖7比較可知,模糊PI控制輸出波形與理想電壓值更接近.對鋰電池充電而言,過小的電壓值會降低充電速度,過大電壓會使鋰電池使用壽命受損. 因此,采用模糊PI控制對鋰電池充電非常有利.
為比較電壓響應(yīng)速度與準(zhǔn)確度,改變充電理想電壓值,使其隨時間的變化而變化,文獻(xiàn)[9]中介紹了一般的鋰電池充電策略的電壓波形圖,在仿真實(shí)驗(yàn)中,改變理想電壓波形使其與一般鋰電池充電電壓波形相似,可得仿真結(jié)果波形如圖8所示,模糊PI控制策略輸出充電電壓與理想電壓非常接近,因此,模糊PI控制策略更能滿足不同充電策略對充電電壓響應(yīng)速度及準(zhǔn)確度的要求.
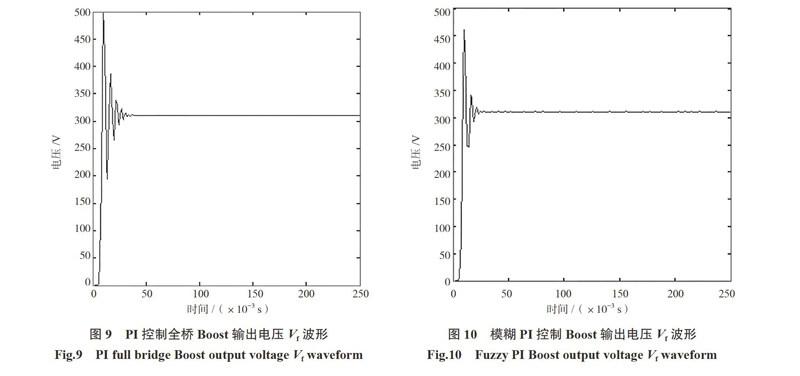
同理,對于饋電時的全橋Boost模型,采用模糊PI控制策略,使電動汽車中鋰電池的電能可以反饋到前級AC-DC變換器.根據(jù)上面參數(shù),在MATLAB中建立仿真對應(yīng)的我們可以得到相應(yīng)的相應(yīng)simulink仿真輸出電壓波形圖,圖9為PI控制饋電輸出整流電壓Vf波形圖,圖10為模糊PI控制饋電輸出整理電壓Vf 波形圖,兩者輸出穩(wěn)態(tài)電壓皆與理想電壓值接近,滿足要求,進(jìn)行對比可知模糊PI控制反饋輸出電壓Vf 波動較小,在實(shí)際的變換器設(shè)計中,也能減小濾波電容的容量,從而使變換器的體積更加輕巧.
4.3 仿真實(shí)驗(yàn)結(jié)果分析
通過對比圖6與圖7的波形圖,可知本文設(shè)計模糊PI控制策略輸出電壓在此仿真實(shí)驗(yàn)中穩(wěn)態(tài)誤差較傳統(tǒng)控制策略大約減小了[(260-256)-(260-258)]×100%/(260-256)=50%左右.對比圖8中的3種波形,假設(shè)充電電能全部轉(zhuǎn)換為鋰電池中的電能,相同充電時刻鋰電池的阻值相同,由公式電能E=U2*t/R,可知,在相同的時間內(nèi)此仿真實(shí)驗(yàn)中模糊PI控制策略對鋰電池充電的電量更大,較傳統(tǒng)PI控制大概提高15%左右.那么在V2G系統(tǒng)中,相同的時間就能夠給更多的電池充電且損耗小,從而節(jié)約了能源,且有更多的電能可以用于調(diào)節(jié)電網(wǎng).在做仿真實(shí)驗(yàn)時,不同的充電電壓與理想電壓之間的壓差與壓差的變化率是不同的,因此要想使調(diào)節(jié)時間更短、輸出波形更加理想,對輸入輸出隸屬度函數(shù)閾值及輸入輸出模糊值比例的設(shè)計應(yīng)該進(jìn)行多次實(shí)驗(yàn),找出更加理想的隸屬度函數(shù),這樣模糊控制對PI參數(shù)的整定會更加理想.
5 結(jié)論
本文基于V2G充電樁系統(tǒng)的DC-DC變換器的特點(diǎn)及在系統(tǒng)中的用途,選取了一種電能可雙向流動的全橋DC-DC變換器拓?fù)洌瑢ζ涔ぷ鬟^程進(jìn)行了敘述,簡單講解了其小信號模型,以移相角及輸出電壓為對象,設(shè)計了一種模糊PI控制策略,并通過simulink仿真實(shí)驗(yàn),得出模糊PI控制策略較傳統(tǒng)PI控制策略可以更快速地達(dá)到滿足要求輸出電壓、減小穩(wěn)態(tài)誤差,更能夠滿足V2G充電樁中DC-DC變換器對輸出電壓響應(yīng)快、精確度高的要求,從而提高了V2G系統(tǒng)節(jié)約資源、調(diào)節(jié)電網(wǎng)的能力.
參考文獻(xiàn)
[1]劉曉飛,張千帆,崔淑梅.電動汽車V2G技術(shù)綜述[J].電工技術(shù)學(xué)報,2012,27(2):121-127.
[2]李廣地,呂浩華,袁軍,等.動力鋰電池的壽命研究綜述[J].電源技術(shù),2016,40(6):1312-1314.
[3]徐磊.動力鋰電池充電技術(shù)研究[D].太原:太原科技大學(xué),2014.
[4]吳曉光,羊彥.雙閉環(huán)反饋控制半橋DC-DC變換器設(shè)計[J].電子設(shè)計工程,2014,22(16):100-102.
[5]徐凌.基于雙閉環(huán)PI控制的單相全橋PWM整流控制器的研究[J]. 電工技術(shù), 2015(1):90-91.
[6]馬俊龍.移相控制的ZVSPWMDC/DC全橋變換器的占空比丟失研究[J].科技信息,2011(1):101-129.
[7]皮之軍.移相全橋ZVS變換器及其數(shù)字控制技術(shù)研究[D].武漢:華中科技大學(xué),2006.
[8]解光軍,程心.DC-DC開關(guān)變換器的建模與設(shè)計[M].北京:科學(xué)出版社,2015.
[9]何秋生,徐磊,吳雪雪.鋰電池充電技術(shù)綜述[J].電源技術(shù),2013,37(8):1464-1466.
Abstract: Vehicle-to-grid (V2G) technology can realize the interaction between the electric vehicle and the grid. It can not only realize the peak load shifting of the power grid, reduce the construction investment of the power grid, but also reduce the use cost of electric vehicles. In the V2G system, the charge and discharge of the lithium battery are more frequent. The charging voltage and current value of the lithium battery have great influence on the charging speed and the service life of the lithium battery. Though the traditional DC-DC converter control strategy can realize the charging of lithium battery, the slow response of the voltage and current value to the steady state value and great steady-state error will greatly increase the charging time and reduce the service life of the lithium battery, this paper proposes a fuzzy PI to DC-DC converter control strategy, which is adopted by the fuzzy control to adjust PI parameters to reduce the steady-state error and shorten the time that the charging voltage and current value reach the steady state, thereby improving the service life of the lithium battery, enabling the lithium battery to store more energy when the power grid load is smaller, the V2G system to achieve the better peak load shifting. The experimental results show that the proposed method can effectively reduce the steady-state error of charge and discharge of lithium battery and the time to reach the steady-state value.
Key words: V2G charging pile; DC-DC converter; fuzzy PI control
(學(xué)科編輯:張玉鳳)