放飛過(guò)程中平流層飛艇運(yùn)動(dòng)與受力分析
2018-05-04 00:46:06張?zhí)┤A姜魯華周江華
北京航空航天大學(xué)學(xué)報(bào) 2018年4期
關(guān)鍵詞:結(jié)構(gòu)分析
張?zhí)┤A, 姜魯華, 周江華
(1. 中國(guó)科學(xué)院光電研究院, 北京 100094; 2. 中國(guó)科學(xué)院大學(xué), 北京 100049; 3. 中國(guó)科學(xué)院高能物理研究所, 北京 100049)
由于平流層在大氣環(huán)境、氣象條件和高度等多方面的綜合特點(diǎn),在平流層部署飛艇進(jìn)行長(zhǎng)期環(huán)境監(jiān)測(cè)、通信中繼和對(duì)地觀測(cè)成為研究熱點(diǎn)[1]。平流層飛艇的工作高度比衛(wèi)星低,電波傳播時(shí)延小,自由空間損耗小,造價(jià)相對(duì)較低。同時(shí),平流層飛艇還有較強(qiáng)的抗毀生存能力。因此,平流層飛艇效費(fèi)比將高于其他亞軌道飛行器和低軌衛(wèi)星,在區(qū)域監(jiān)控和天-地、天-空信息交互方面優(yōu)勢(shì)明顯,無(wú)論是在軍用,還是科學(xué)及民用領(lǐng)域,都具有極其廣闊的應(yīng)用前景[2-3]。在國(guó)際上,美國(guó)和日本等國(guó)進(jìn)行了一些探索性試驗(yàn),美國(guó)HiSentinel系列[4-5]和HALE-D[6-7]飛艇曾進(jìn)行了一些關(guān)鍵技術(shù)探索和飛行試驗(yàn),日本GTS系列[8]和SPF[9]不帶動(dòng)力飛艇也曾在升空試驗(yàn)中成功到達(dá)了平流層高度,這些工作為平流層飛艇技術(shù)的發(fā)展積累了一定的經(jīng)驗(yàn)。
從解除地面設(shè)備對(duì)飛艇的約束到飛艇離開(kāi)地面的過(guò)程即為飛艇的放飛過(guò)程。將體積龐大的平流層飛艇從艇庫(kù)轉(zhuǎn)運(yùn)至放飛場(chǎng),并盡快實(shí)施放飛決定了整個(gè)飛行試驗(yàn)是否能順利實(shí)施,一些平流層飛艇在放飛階段即被迫推遲或取消飛行試驗(yàn)[6-7,9]。平流層飛艇放飛后,由靜止開(kāi)始加速上升,艇體內(nèi)氦氣竄動(dòng)引起浮心和重心變化導(dǎo)致飛艇運(yùn)動(dòng)復(fù)雜,龐大的體積和巨大的表面積導(dǎo)致了氣動(dòng)與附加質(zhì)量的疊加,影響了飛艇的動(dòng)力響應(yīng)。位于柔性艇體上設(shè)備在放飛過(guò)程中的過(guò)載及其對(duì)柔性艇體的應(yīng)力集中進(jìn)一步增加了放飛過(guò)程的不確定因素和風(fēng)險(xiǎn)。
隨著飛行試驗(yàn)的開(kāi)展,國(guó)內(nèi)外對(duì)平流層飛艇放飛過(guò)程也進(jìn)行了大量研究。Selby[10]對(duì)平流層飛艇在不同工況下放飛及放飛后的特性做了較為深入的研究,分別分析了在順風(fēng)和逆風(fēng)情況下實(shí)施放飛時(shí)所受的氣動(dòng)力及放飛風(fēng)險(xiǎn);趙攀峰等[11]以常規(guī)布局形式的平流層飛艇為例,分析了飛艇放飛、回收的一般步驟,對(duì)上升、下降過(guò)程做了數(shù)值仿真分析;郭虓等[12]分析了飛艇基本熱力學(xué)行為,研究了艇體及內(nèi)部氣體的能量方程并建立了詳細(xì)的飛艇動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)模型,通過(guò)對(duì)不同場(chǎng)景的問(wèn)題進(jìn)行最優(yōu)化軌跡求解,評(píng)估了飛艇在上升過(guò)程中,太陽(yáng)能輻射和風(fēng)場(chǎng)對(duì)熱交換的影響,進(jìn)而將不同時(shí)間點(diǎn)放飛對(duì)飛艇的影響進(jìn)行了評(píng)估;吳雷等[13]分析了飛艇在放飛過(guò)程中因其所處環(huán)境的巨大變化導(dǎo)致飛艇內(nèi)部氣體質(zhì)量和分布情況的變化情況,給出了能基本反映這一變化過(guò)程的飛艇放飛段動(dòng)力學(xué)模型。總的來(lái)說(shuō),這些研究主要對(duì)飛艇放飛時(shí)機(jī)的選擇及模型的求解進(jìn)行了定性的分析,還沒(méi)有開(kāi)展較為系統(tǒng)的研究。
本文分析了放飛過(guò)程飛艇動(dòng)力學(xué)響應(yīng)特征,計(jì)算飛艇完成放飛所需的時(shí)間,以及在此期間飛艇的仰角、角速度和地面支撐力等變化。將計(jì)算結(jié)果與飛行試驗(yàn)比較,為平流層飛艇放飛過(guò)程提供了解析求解方法,也為相關(guān)操作及地面輔助措施的選擇提供參考。本文在計(jì)算過(guò)程中忽略地面風(fēng)對(duì)放飛過(guò)程的影響,主要分析放飛過(guò)程中的艇體氣動(dòng)阻力。
1 平流層飛艇囊體結(jié)構(gòu)形式
平流層飛艇通常選擇在20 km左右的平流層底部飛行或駐留,平流層大氣稀薄,要依靠浮力保持穩(wěn)定駐空,需要飛艇具有較大的體積,一般在數(shù)萬(wàn)至數(shù)十萬(wàn)立方米之間,飛艇的長(zhǎng)度在百米量級(jí)[14]。平流層飛艇在地面時(shí),由于大氣密度較高,只需在飛艇內(nèi)充入較少的氦氣就能提供滿足所需的升空浮力,艇囊90%以上的空間中充滿空氣以使飛艇保持設(shè)計(jì)外形。一般而言,平流層飛艇的艇囊可分為單氦氣囊和多氦氣囊2種形式,如圖1所示。
單氦氣囊結(jié)構(gòu)中,艇囊中的氦氣都在一個(gè)氦氣囊中,與空氣囊之間只有一個(gè)副氣囊隔層,在飛艇縱向一般對(duì)氣體無(wú)約束。日本于2003年8月成功實(shí)施了飛行試驗(yàn)的SPF-1飛艇即采用了單氦氣囊結(jié)構(gòu)[9],飛艇前點(diǎn)解除約束后,飛艇加速抬頭升空,放飛照片如圖2所示。
多氦氣囊結(jié)構(gòu)中,艇囊中的氦氣和(或)空氣被分割成了2個(gè)以上的單獨(dú)空間,以限制其在飛艇縱向的竄動(dòng),防止飛艇姿態(tài)變化超出可控范圍。為了便于在飛艇上升過(guò)程中排氣順暢和保持壓差穩(wěn)定,也可將氦氣囊或空氣囊進(jìn)行局部聯(lián)通。
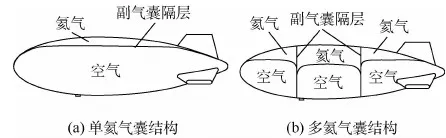
圖1 平流層飛艇氦氣囊結(jié)構(gòu)示意圖Fig.1 Schematic of helium-envelope structure of stratospheric airship
美國(guó)于2011年7月進(jìn)行了“HALE-D”平流層飛艇飛行試驗(yàn)[6-7](見(jiàn)圖3),該飛艇解除兩側(cè)約束后,飛艇姿態(tài)平穩(wěn),推測(cè)其囊體結(jié)構(gòu)采用了多氦氣囊結(jié)構(gòu)形式。
本文對(duì)平流層飛艇采用2種氦氣囊結(jié)構(gòu)形式的放飛過(guò)程進(jìn)行分析,并將分析得到的單氦氣囊結(jié)構(gòu)的定量結(jié)果與飛行試驗(yàn)過(guò)程中獲得的數(shù)據(jù)進(jìn)行對(duì)比,驗(yàn)證分析計(jì)算方法的正確性,也為進(jìn)一步優(yōu)化放飛過(guò)程的操作提供依據(jù)。

圖2 SPF-1飛艇放飛(日本)Fig.2 Launch of SPF-1 airship (Japan)

圖3 HALE-D飛艇放飛(美國(guó))Fig.3 Launch of HALE-D airship (USA)
2 單氦氣囊結(jié)構(gòu)放飛過(guò)程分析
根據(jù)單氦氣囊結(jié)構(gòu)的特點(diǎn)和安全可靠放飛的要求,一種典型的平流層飛艇放飛過(guò)程如圖4所示。放飛前,飛艇接近于水平放置,艇體兩側(cè)各用2根繩索拉住,并使艇體后部坐落在支撐墊上,艇體處于小仰角狀態(tài);放飛時(shí),解除艇體兩端約束,在浮力作用下,艇體快速抬頭,仰角迅速增大,當(dāng)艇體前部升到一定高度時(shí),后部脫離支撐墊,飛艇以大仰角狀態(tài)起飛離地,放飛過(guò)程完成。

圖4 一種單氦氣囊結(jié)構(gòu)飛艇的放飛過(guò)程Fig.4 Launch process of airship with single helium envelope structure
2.1 飛艇受力
飛艇依靠?jī)?nèi)部充氣達(dá)到一定的正壓,以保證其設(shè)計(jì)外形并使其具有一定的剛度。據(jù)此,假設(shè)飛艇為剛體,建立如圖5所示坐標(biāo)系。OXY坐標(biāo)系為地面坐標(biāo)系,O′xy為艇基坐標(biāo)系,以飛艇體心為坐標(biāo)原點(diǎn),O′x軸為飛艇縱軸,O′z軸垂直O(jiān)′xy平面,坐標(biāo)軸符合右手法則。
圖5中:T1和T2分別表示地面設(shè)備對(duì)飛艇約束力;Fb為艇囊內(nèi)氦氣總浮力;Nx、Ny為飛艇所受的接觸力;G為艇體結(jié)構(gòu)重力。
為使問(wèn)題具有普遍性,假設(shè)飛艇在放飛前初始仰角為φ0。從后往前依次解除兩端拉繩T2、T1的約束,飛艇前部逐漸升起。在此過(guò)程中的某一時(shí)刻,飛艇受力和角度如圖6所示。

圖5 飛艇放飛前受力示意圖Fig.5 Force diagram before airship launch
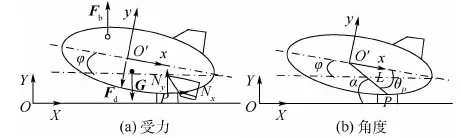
圖6 飛艇放飛過(guò)程中受力與角度示意圖Fig.6 Schematic of force status and angle during airship launch process
地面坐標(biāo)系與艇體坐標(biāo)系的關(guān)系為
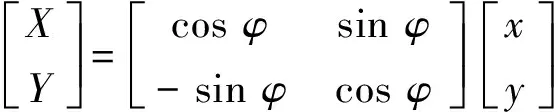
(1)
2.2 動(dòng)力學(xué)方程
飛艇放飛前系統(tǒng)靜止,力系平衡,有
(2)
式中:Fb、Fd和N分別為浮力、氣動(dòng)阻力和腹部支撐力。放飛后,在體心坐標(biāo)系上建立方程,可得矢量形式的動(dòng)力學(xué)方程[15]為
(3)

展開(kāi)后,可得到6自由度標(biāo)量形式的動(dòng)力學(xué)方程。本文著重考慮飛艇發(fā)放過(guò)程縱剖面內(nèi)的運(yùn)動(dòng),因此抽取其縱向3自由度標(biāo)量形式的動(dòng)力學(xué)方程如下:
(4)
式中:MN為飛艇所受的接觸力矩;Fx、Fy和Mz分別為浮力、重力、氣動(dòng)阻力產(chǎn)生的合力分量和合力矩;(xa,ya)為飛艇系統(tǒng)總質(zhì)心。
式(4)變換后得
(5)
式中:J為飛艇轉(zhuǎn)動(dòng)慣量。
(6)
其中:mAx、mAy和Iz、IAz分別為附加質(zhì)量和慣性矩。
運(yùn)動(dòng)學(xué)方程:
(7)
式中:φ為飛艇仰角。
(8)
2.3 約束條件
在放飛過(guò)程中,假設(shè)飛艇與支撐點(diǎn)P之間無(wú)相對(duì)滑動(dòng),飛艇質(zhì)心與支撐點(diǎn)P之間距離為L(zhǎng)。當(dāng)飛艇仰角為φ時(shí),圖6中各角度間關(guān)系為
α=φ+θP
(9)
將飛艇姿態(tài)變化過(guò)程中質(zhì)心近似為不變,則θP為常數(shù),對(duì)式(9)求導(dǎo),有
(10)
(11)
對(duì)式(11)求導(dǎo),可得
(12)
將式(11)、式(12)代入式(5),得
(13)
2.4 力和力矩
根據(jù)飛艇受力,將飛艇受到的氣動(dòng)阻力分解為沿x和y2個(gè)方向,根據(jù)飛艇外形仿真得到這2個(gè)方向氣動(dòng)阻力系數(shù)[16],有
MN=L(NycosθP-NxsinθP)
(14)
(15)
式中:(xb,yb)為飛艇浮心;Ff為凈浮力;Fdx和Fdy為飛艇氣動(dòng)阻力。
根據(jù)飛艇氣動(dòng)阻力公式[17],將式(11)代入得
(16)

由式(13)~式(16)得到解除約束后的動(dòng)力學(xué)微分方程
(17)
式中:
f1=-L2(mycos2θP+mxsin2θP)+
2mL(xacosθP+yasinθP)-Jz
(18)
f2=L2[(mx-my)cosθpsinθp+
(19)
f3=Fb(xbcosφ+ybsinφ)-FfL(cosφcosθP+
sinφsinθP)-mg(xacosφ+yasinφ)
(20)
式(17)與式(7)、式(8)一起構(gòu)成了方程的解。支撐點(diǎn)P所受的約束力,可由式(13)和式(15)得到,轉(zhuǎn)換到地面坐標(biāo)系為
NX=Nxcosφ+Nysinφ
(21)
NY=-Nxsinφ+Nycosφ
(22)
2.5 輔助方程
飛艇系統(tǒng)總質(zhì)量為
m=ms+mHe+mair=
(23)
式中:c=ρ/ρHe,ρHe為氦氣密度;ms、mHe和mair分別為艇體結(jié)構(gòu)、氦氣和空氣的質(zhì)量。系統(tǒng)總質(zhì)心為
(24)
式中:(xs,ys)為艇體結(jié)構(gòu)質(zhì)心。總慣量為
(25)
式中:IHe、Iair和Is分別為氦氣、空氣和艇體的結(jié)構(gòu)慣量;Izt為艇體幾何慣量;Izb為氦氣部分幾何慣量。附加質(zhì)量[18]和慣性矩為
(26)
式中:k1、k2和k3為附加質(zhì)量系數(shù)。
2.6 工況分析
1) 飛艇放飛瞬間
在飛艇解除約束瞬間,由于ωz=0,由式(17)可求得此時(shí)飛艇初始角加速度:
(27)
根據(jù)艇上設(shè)備位置,進(jìn)而可得艇上設(shè)備放飛時(shí)受到的初始過(guò)載。
2) 飛艇離地
因支撐點(diǎn)P無(wú)法提供拉力,由式(22)可得,當(dāng)NY<0時(shí),飛艇離開(kāi)支撐點(diǎn)P,完成放飛。
3 多氦氣囊結(jié)構(gòu)放飛過(guò)程分析
多氦氣囊結(jié)構(gòu)中,艇囊內(nèi)設(shè)置多個(gè)氦氣囊,極大地限制了因飛艇姿態(tài)變化而導(dǎo)致的氦氣竄動(dòng),也嚴(yán)格控制飛艇浮心變化。在飛艇放飛升空過(guò)程中,飛艇姿態(tài)一直處于可控狀態(tài)。實(shí)施放飛時(shí),飛艇一般小仰角或水平狀態(tài)離地,其飛行過(guò)程如圖7所示。
在實(shí)施這種結(jié)構(gòu)飛艇的放飛過(guò)程中,飛艇浮心與重心保持不變,飛艇的運(yùn)動(dòng)形式將大大簡(jiǎn)化,解除約束后,飛艇加速上升。飛艇在放飛前后的約束及受力狀態(tài)如圖8所示。

圖7 多氦氣囊結(jié)構(gòu)飛艇的飛行過(guò)程Fig.7 Flight process of airship with multi-helium envelope structure

圖8 多氦氣囊結(jié)構(gòu)飛艇放飛前后受力Fig.8 Force status for multi-helium envelope structure before and after airship launch
解除約束后,在不考慮水平來(lái)流的情況下,飛艇將垂直上升,即
(28)
根據(jù)飛艇動(dòng)力學(xué)方程,由式(4)變換后得
(29)
將式(29)中第1式代入第2式,整理得
(30)
在上升過(guò)程中的氣動(dòng)阻力,由式(16)有
從當(dāng)今互聯(lián)網(wǎng)發(fā)展的現(xiàn)狀來(lái)看,強(qiáng)調(diào)用戶量、用戶關(guān)系、優(yōu)質(zhì)的內(nèi)容依然是互聯(lián)網(wǎng)發(fā)展中的有效保證。移動(dòng)互聯(lián)網(wǎng)的發(fā)展帶來(lái)了哪些影響呢?改變了內(nèi)容生產(chǎn)的分發(fā)方式,慢慢實(shí)現(xiàn)了中心化。在生產(chǎn)內(nèi)容上,人人都可以成為內(nèi)容的提供者,使移動(dòng)互聯(lián)網(wǎng)進(jìn)入了全民時(shí)代。也是因?yàn)槿绱耍苿?dòng)短視頻的生產(chǎn)內(nèi)容逐步走向多元化。其中,最具有代表的兩種:UGC和PGC。
(31)
代入式(15),得
(32)
式中:g為重力加速度。
將式(32)代入式(30),得
(xbcosφ+ybsinφ)Fb-(xacosφ+

(33)
式(33)與式(7)、式(8)一起構(gòu)成了方程的解。
(34)
代入式(32),得
(35)
由式(35)即可求得穩(wěn)定上升時(shí)的升速,也可根據(jù)設(shè)計(jì)升速,求出飛艇所需凈浮力。
4 算 例
4.1 單氦氣囊結(jié)構(gòu)

根據(jù)上述分析,得到支撐點(diǎn)P受到的作用力(NX,NY)隨時(shí)間變化曲線如圖10所示。
飛艇在放飛過(guò)程中,質(zhì)心水平和垂直速度的變化如圖11所示,飛艇仰角隨時(shí)間變化的計(jì)算結(jié)果和實(shí)測(cè)數(shù)據(jù)對(duì)比如圖12所示,角速度隨時(shí)間變化的計(jì)算結(jié)果和實(shí)測(cè)數(shù)據(jù)的對(duì)比如圖13所示。從圖12和圖13的對(duì)比曲線可以看出,飛艇實(shí)際放飛中解除約束的響應(yīng)比計(jì)算分析結(jié)果明顯遲滯,這主要是因?yàn)樵诜治鲋袑w艇是近似為剛體,而實(shí)測(cè)角速度值較為發(fā)散是飛艇上的角度傳感器的測(cè)量誤差所致,但在變化趨勢(shì)與計(jì)算結(jié)果一致,能夠滿足工程應(yīng)用需求。
通過(guò)上述分析計(jì)算,得到飛艇整個(gè)放飛過(guò)程中的姿態(tài)變化如圖14所示。
計(jì)算表明,飛艇放飛后17.9 s,NY<0,此后飛艇離開(kāi)支撐點(diǎn),也意味著飛艇完成放飛離開(kāi)地面,此時(shí)飛艇仰角為43.8°。在飛艇放飛過(guò)程中,支撐點(diǎn)水平作用力最大NXmax=6.183 kN,支撐點(diǎn)垂直作用力最大NYmax=2.405 kN。

圖9 參數(shù)xb,yb和Izb隨飛艇仰角變化示意圖Fig.9 Fluctuation of parameter xb,yb and Izb with airship elevation angle
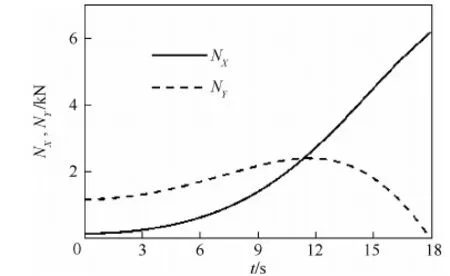
圖10 飛艇放飛過(guò)程N(yùn)X,NY變化Fig.10 Fluctuation of NX,NY during airship launch process

圖11 飛艇放飛過(guò)程中質(zhì)心速度變化Fig.11 Fluctuation of center-of-mass velocity during airship launch process

圖12 飛艇仰角計(jì)算結(jié)果與實(shí)測(cè)數(shù)據(jù)對(duì)比Fig.12 Comparison of elevation angle of airship between calculation results and flight test data

圖13 飛艇角速度計(jì)算結(jié)果與實(shí)測(cè)數(shù)據(jù)對(duì)比Fig.13 Comparison of angular velocity of airship between calculation results and flight test data
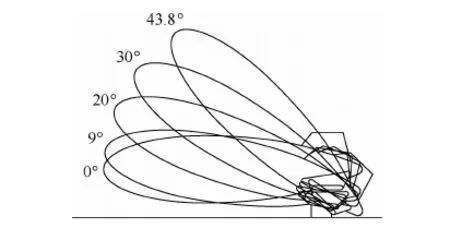
圖14 飛艇放飛過(guò)程中的姿態(tài)變化Fig.14 Change of airship attitude during launch process
4.2 多氦氣囊結(jié)構(gòu)
如果算例所示飛艇采用多氦氣囊結(jié)構(gòu)形式,解除約束后飛艇重心和浮心都保持不變,利用第3節(jié)分析,可以得到飛艇解除約束后的仰角和升速變化如圖15所示。
由圖15可知,如果算例中的飛艇采用多氦氣囊結(jié)構(gòu),放飛后穩(wěn)定升速為1.56 m/s。在放飛過(guò)程中,解除約束后,飛艇升速在3~5 min內(nèi)趨于穩(wěn)定,仰角在21°~5°之間進(jìn)行寬幅波動(dòng)后趨于穩(wěn)定。增大浮重比對(duì)飛艇仰角影響較小,但能顯著增大穩(wěn)定升速。如果平流層飛艇要快速升空,并安全穿過(guò)對(duì)流層頂疾風(fēng)區(qū),需增大浮力,以增大飛艇穩(wěn)定升速。為此,以浮重比η作為輸入?yún)?shù),其定義為
(36)
不同的浮重比,飛艇穩(wěn)定升空時(shí)的仰角和升速如表1所示。
由表1計(jì)算結(jié)果可知,飛艇浮重比增大,飛艇穩(wěn)定升速增大,但對(duì)飛艇穩(wěn)定仰角影響較小。選取浮重比η分別為1.1、1.5和1.8三種情況下,飛艇放飛后的升速變化如圖16所示。
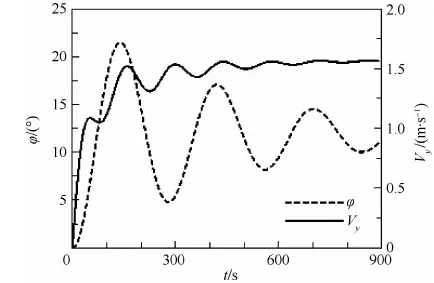
圖15 放飛后飛艇仰角與升速變化Fig.15 Fluctuation of pitch angle and rising velocity of airship after launch

浮重比仰角/(°)升速/(m·s-1)1.111.131.561.211.412.201.311.562.691.411.663.111.511.723.471.611.773.811.711.814.111.811.844.391.911.864.662.011.884.91

圖16 3種典型浮重比下飛艇升速變化Fig.16 Fluctuation of rising velocity of airship for three typical buoyancy-weight ratios
4.3 兩種結(jié)構(gòu)形式比較
通過(guò)上述分析可知,氦氣囊結(jié)構(gòu)設(shè)計(jì)對(duì)飛艇放飛和升空影響很大,不同的氦氣囊結(jié)構(gòu)形式?jīng)Q定了飛艇放飛方式。在飛艇升空過(guò)程中,升速是一個(gè)非常重要的技術(shù)指標(biāo),以算例中的飛艇為例,不同的設(shè)計(jì)升速與所需的浮重比η如圖17所示。
采用單氦氣囊和多氦氣囊結(jié)構(gòu)形式,各有利弊,不同形式的氦氣囊結(jié)構(gòu),決定了不同的放飛和升空過(guò)程。在飛艇到達(dá)設(shè)計(jì)高度,進(jìn)行平飛階段后,無(wú)論采用哪種氦氣囊結(jié)構(gòu)形式,其浮重比η都趨近于1,即達(dá)到浮重平衡狀態(tài)。在飛艇上升過(guò)程中,隨著高度增加,不但要排出空氣囊中的空氣以確保艇囊壓差在安全范圍內(nèi),也要逐漸排出多余氦氣,以確保飛艇最終的浮重平衡。兩種氦氣囊結(jié)構(gòu)的對(duì)比如表2所示。

圖17 兩種氦氣囊結(jié)構(gòu)升速與浮重比關(guān)系Fig.17 Comparison of rising velocity and buoyancy-weight ratio between two kinds of helium envelope structure

比較項(xiàng)目單氦氣囊結(jié)構(gòu)多氦氣囊結(jié)構(gòu)氦氣分布同一容腔多個(gè)容腔飛艇浮心變化很大,不可控很小,受控升空姿態(tài)大仰角小仰角,可選擇放飛時(shí)飛艇姿態(tài)加速抬頭,尾部下頓仰角不變排氣方式尾部集中排氣分段排氣升速/(m·s-1)5~102~5浮重比小大副氣囊結(jié)構(gòu)簡(jiǎn)單復(fù)雜加工工藝簡(jiǎn)單復(fù)雜壓控簡(jiǎn)單復(fù)雜放飛形式復(fù)雜簡(jiǎn)單典型案例日本SPF?1美國(guó)HALE?D
5 結(jié) 論
通過(guò)對(duì)平流層飛艇在放飛過(guò)程中的動(dòng)力學(xué)響應(yīng)分析,結(jié)果表明:
1) 在單氦氣囊結(jié)構(gòu)形式的放飛過(guò)程中,飛艇受到的支撐點(diǎn)水平作用力持續(xù)增大,支撐點(diǎn)垂直作用力先增大后減小,在放飛后段飛艇尾部必將發(fā)生滑動(dòng),若采用硬連接方式限制尾部滑動(dòng),應(yīng)充分考慮柔性艇尾的承載能力,確保柔性艇尾的安全。
2) 在多氦氣囊結(jié)構(gòu)形式的放飛過(guò)程中,放飛后升速?gòu)牧汩_(kāi)始劇烈波動(dòng)后收斂較快,仰角變化劇烈,收斂較慢,飛艇以穩(wěn)定升速升空后,仰角變化逐漸收斂。增大浮重比對(duì)飛艇仰角影響較小,但能顯著增大穩(wěn)定升速。
3) 通過(guò)兩種氦氣囊結(jié)構(gòu)形式對(duì)比,其各有優(yōu)缺點(diǎn):采用單氦氣囊結(jié)構(gòu)形式浮重比較小,可以大仰角快速升空,但仰角變化不可逆不可控,放飛方式復(fù)雜;采用多氦氣囊結(jié)構(gòu)形式升空所需凈浮力較大,仰角實(shí)時(shí)可控可調(diào),壓控與排氣復(fù)雜,放飛方式簡(jiǎn)單。
4) 通過(guò)與飛行試驗(yàn)數(shù)據(jù)比較,本文方法能夠滿足工程應(yīng)用需求,為平流層飛艇放飛方式的選擇和評(píng)估提供了理論分析途徑。根據(jù)平流層飛艇放飛場(chǎng)實(shí)際條件,可對(duì)后續(xù)的研究進(jìn)一步細(xì)化或區(qū)分不同工況:地面風(fēng)甚至非定常風(fēng)對(duì)飛艇放飛的影響,飛艇行進(jìn)中放飛動(dòng)力學(xué),以及將飛艇支撐點(diǎn)代以實(shí)際中的苫布或氣墊等,這些分析都可基于本文的計(jì)算分析,進(jìn)行部分方程或條件的增減而完成。
參考文獻(xiàn) (References)
[1] LIAO L,PASTERNAK I.A review of airship structural research and development[J].Progress in Aerospace Sciences,2009,45(4-5):83-96.
[2] STOCKBRIDGE C,CERUTI A,MARZOCCA P.Airship research and development in the areas of design,structures,dynamics and energy systems[J].International Journal of Aeronautical & Space Sciences,2012,13(2):170-187.
[3] WILSON J R.A new era for airships[J].Aerospace America,2004,42(5):27-31.
[4] STEVE S.The HiSentinel airship[C]∥7th AIAA Aviation Technology,Integration and Operations Conference.Reston:AIAA,2007.
[5] SMITH I,LEE M,FORTNEBERRY M,et al.HiSentinel80:Flight of a high altitude airship[C]∥11th AIAA Aviation Technology,Integration,and Operations Conference.Reston:AIAA,2011.
[6] Lockheed Martin Space System Company High altitude airship[EB/OL].(2014-11-10)[2017-04-13].http:∥www.lockheedmartin.com/us/products/lighter-than-air-vehicles.
[7] GAO.Future aerostat and airship investment decisions drive oversight and coordination needs:GAO-13-81[R].Washington,D.C.:GAO,2012.
[8] JAXA.Ground-to-stratosphere flight test and evaluation of materials and structure for stratospheric airship test vehicle:JAXA-RM-04-012[R].Tokyo:JAXA,2004:7-35.
[9] SHUNICHI O,NOBORU S.R&D status of RFC technology for SPF airship in Japan[C]∥9th Annual International Energy Conversion Engineering Conference.Reston:AIAA,2011.
[10] SELBY C.High altitude airship station keeping and launch model development using output from numerical weather prediction models[D].West Lafayette:Purdue University,2008.
[11] 趙攀峰,王永林,劉傳超.平流層飛艇放飛、回收過(guò)程初步分析[J].航空科學(xué)技術(shù),2007(4):24-29.
ZHAO P F,WANG Y L,LIU C C.Preparatory analyse on the release and recovery course of stratosphere airship[J].Aeronautical Science and Technology,2007(4):24-29(in Chinese).
[12] 郭虓,祝明,武哲.綜合熱力學(xué)模型的平流層飛艇上升軌跡優(yōu)化[J].北京航空航天大學(xué)學(xué)報(bào),2012,38(10):1346-1351.
GUO X,ZHU M,WU Z.Ascent trajectory optimization for stratospheric airships with thermal effects[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(10):1346-1351(in Chinese).
[13] 吳雷,李勇,梁棟.平流層飛艇放飛段動(dòng)力學(xué)建模[C]∥第25屆中國(guó)控制會(huì)議,2006:546-550.
WU L,LI Y,LIANG D.Dynamics modeling on the launch process for a stratospheric airship[C]∥Proceeding of the 25th Chinese Control Conference,2006:546-550(in Chinese).
[14] BLACKINGTON E.United States air force,schriever air force base:AIAA-2003-6005[R].Reston:AIAA,2003.
[15] 周江華.平流層飛艇運(yùn)動(dòng)控制律與定點(diǎn)控制律設(shè)計(jì)[D].北京:中國(guó)科學(xué)院空間科學(xué)與應(yīng)用中心,2009:22-26.
ZHOU J H.Control law design for motion control and station-keeping control of stratospheric platform airship[D].Beijing:Center for Space Science and Applied Research,Chinese Academy of Sciences,2009:22-26(in Chinese).
[16] CUI Y X,YANG Y C,ZHOU J H,et al.Numerical aerodynamic investigations on stratospheric airships of different tail configurations[C]∥IEEE Aerospace Conference.Piscataway,NJ:IEEE Press,2015:3-4.
[17] KHOURY G,GILLELT J.Airship technology[M].Cambridge:Cambridge University Press,1999:20-23.
[18] LI Y W,NATHON M.Modeling and simulation of airship dynamics[J].Journal of Guidance,Control,and Dynamics,2007,30(6):1691-1700.
[19] 張?zhí)┤A,姜魯華,張冬輝,等.臨近空間飛艇艇庫(kù)外約束及穩(wěn)定性分析[J].中國(guó)空間科學(xué)技術(shù),2016,36(5):72-80.
ZHANG T H,JIANG L H,ZHANG D H,et al.Constraint and stability analysis of near space airship outside hangar[J].Chinese Space Science and Technology,2016,36(5):72-80(in Chinese).
猜你喜歡
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06