機載激光測速系統及其在飛行試驗中的應用
2018-05-05 07:47:57屈飛舟楊曉萍
科技與創新 2018年9期
屈飛舟,楊曉萍
(中國飛行試驗研究院,陜西 西安 710089)
飛機的空速、高度、迎角、大氣溫度等參數是飛機的飛控系統、航電系統等的重要輸入信息,是影響飛行安全的關鍵參數。典型運輸類飛機的大氣數據系統參數通常由位于機頭的總靜壓探頭、靜壓孔、總溫探頭和迎角風標等測量。由于這些探頭和風標位于飛機的擾流之內,其位置誤差是不可避免的。另外,這些探頭因為結冰、鳥撞或堵塞等原因造成失效,后果往往十分嚴重。
機載激光測速系統是利用多普勒測速原理,直接測量飛機的真空速矢量。該方法可以彌補目前在飛行試驗中廣泛使用的拖錐、前支桿和GPS等試驗方法在非穩態飛行條件下的局限性,同時解決了全速度范圍內迎角和側滑角校準的難題。而且激光測速是非接觸式測量,測量精度高[1],在機艙外無伸出物,因此,國外的公司已經在開展相關飛行試驗,希望將以機載激光測速系統為核心形成的機載激光測速系統作為飛機的本體設備替代現有的空速系統,以解決探頭結冰、鳥撞或堵塞等問題。機載激光測速系統的出現實現了真空速的非接觸測量,消除了位置誤差,不僅影響飛行試驗方法,還需專用的適航條款對其進行審定。
1 系統工作原理
機載激光測速系統利用了光學多普勒效應的原理。多普勒效應是19世紀奧地利物理科學家多普勒?克里斯琴?約翰(Doppler,Christian Johann)發現的聲學效應。在聲源與接收器之間發生相對運動時,接收器收到的聲音頻率不會等于聲源發出的原頻率,稱這一頻率差為多普勒頻差或頻移。
愛因斯坦在狹義相對論中指出,光波也具有類似的多普勒效應。只要物體產生散射光,就可利用多普勒效應測量其運動速度。所謂“光學多普勒效應”,即當光照射運動物體時,光被運動的粒子所散射,散射光的頻率將發生變化,它與入射激光的頻率之差被稱為多普勒頻差或多普勒拍頻。這個頻差正比于物體速度,所以,測出多普勒頻差就測得了物體的速度。這是一種通過測量入射光頻率和散射光頻率來得到多普勒頻移的方法[2]。通過探測散射波的頻率,可以得到飛機的真空速矢量。
2 系統的組成
機載激光測速系統是由激光發射/接收模塊、光路系統模塊、光電轉換模塊、信息處理模塊這4個功能模塊組成的。激光發射/接收模塊是機載激光測速系統中最重要的組成部分之一,特定波長的激光通過探頭發射到大氣環境中,大氣中的粒子與激光相互作用產生多普勒效應和米氏散射效應,從而對激光傳輸產生一定的影響。通過研究激光大氣傳輸理論,分析出各項待測參數,將采集到的光信號進行預處理后傳輸至信號處理單元,經過信號處理單元的處理得到大氣速度、溫度、密度等物理量。典型的機載激光測速系統使用的是固態光纖激光器,波長通常為1.5~10.6 μm,功率不大于100 W(典型為70 W)。激光屬于人眼安全級別,每個OAV(激光大氣速度探頭)中至少裝有3個激光發射器,發出3束激光進行三維激光測量。每束激光有自己的接收器,可使用不同波長,對測量精度沒有影響。
機載激光測速系統在較大動態范圍內,處理范圍廣泛的、從云、冰晶直至純凈空氣的各種后向散射環境。它需要經過約在15 200米高度內的風、雪、冰、云和純凈空氣等環境的測試,以適應任何大氣條件。
系統測量精度是由3個方面的因素決定的:①在3條光束中,每條光束自身固有的測量精度;②3條光束之間的角度精確已知;③OAV探頭的探測角度經過測量,并保持與飛機機身坐標軸的相對關系。國內目前有產品樣機的測速精度可達0.75%[3].
由于測量的是飛機前方若干米的信息,沒有數據延時或滯后的問題。空速管測量空氣壓力是以音速傳播的,較慢;而激光測量設備以光速進行光學測量的,基本上沒有延時。對于激光測量測距而言,如果測量距離太短,測量點的氣流會受到飛機本身的干擾,從而影響測量的精度。所以,測量點距離飛機要足夠遠,這樣測量到的大氣氣流不會受到飛機本身的干擾。對于中大型飛機,比如C919客機,這個距離可以為60~80 m。
3 國外應用研究
國外從20世紀70年代末開始進行機載激光測速的研究。1979年,法國國防機構開始資助高諾斯公司的激光測速研究。20世紀80年代開始,NASA和空客公司開始進行激光測速的飛行試驗應用研究。NASA先后在DC-8、SR-71和L-188飛機上開展了相關的試驗研究,空客公司把激光測速技術應用于A319、A330和A340型號飛機的飛行試驗中,德國和荷蘭近幾年開展了PIV激光技術在飛行試驗中的應用。
表1給出了國外機載激光測速系統的部分使用記錄。機載激光測速系統在國內的研究起步比較晚,目前可見資料是航空工業某技術創新基金項目在實驗室搭建了一個機載激光測速系統平臺。

表1 國外機載激光測速系統使用記錄

表2 應用機載激光測速系統進行參數校準的試飛內容
4 在飛行試驗中的應用
在飛機上安裝機載激光測速系統的探頭時,沒有角度和方位的要求。機身上任何能清楚看到大氣的位置都可安裝(最好是前半區)。通常探頭向前照射而非向后,最好稍微高于機頭方向,避免著陸時激光光束照向地面。探頭不需平行于飛機Χ軸。安裝時,OAV探頭的俯仰角、偏航角和滾轉角需要精確測量,并輸入傳感器中。此后,這些值可用于將空速測量參數轉換到飛機坐標系。推薦的安裝位置有翼根整流罩、尾翼整流罩等。圖1為機載激光測速系統探頭在客艙內加裝的示意圖。
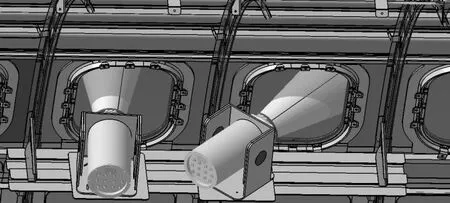
圖1 機載激光測速系統探頭在飛機客艙的加裝示意圖
系統的標準安裝位置是對飛機的一個客艙窗戶進行改裝,承托傳感器所提供的光學級玻璃視窗。OAV探頭安裝后可在一個機頭相對角度下透過視窗探測,如圖1所示。光學玻璃視窗安裝的位置如果積聚了冰或霜,如果飛機擋風玻璃一樣,則需要通過加熱和吹風等方式來除霜。光學玻璃防霧除霜的主要方法有2種,即電加熱和熱空氣自由射流[4]。
在飛行試驗中,機載激光測速設備同時發出不在同一直線上的三束或四束激光,可用來測量飛機的真空速,同時,還可解算出飛機的姿態角。加裝溫度探頭后,還可測量大氣溫度。因此,機載激光測速系統可用來進行大氣數據系統校準,包括空速、高度和溫度的校準,也可以用來進行迎角和側滑角的校準。表2給出了校準試飛的內容。
由于機載激光測速系統是非接觸式測量,通常用于流場測量分析,所以,它不僅可以用來測量飛機的真空速,也可用來測量空中的陣風速度,為陣風載荷試驗打下基礎,總結出相應的試飛方法。
5 結束語
先進大氣數據系統被美國列為航空飛行器控制領域的關鍵技術。機載激光測速系統的數據測量不受飛機機體擾流的干擾和迎角的限制,同時,機載激光測速系統的探測裝置全部位于機體內部,可以滿足軍用飛機的隱身要求和民用飛機的防鳥撞要求[5]。通過開展基于激光測速的空速、溫度、迎角和側滑角校準技術研究,可以為即將開展的C919大型客機、鯤龍600飛機、新舟700飛機等民用飛機全包線范圍內的空速校準試飛和迎角、側滑角校準試飛奠定基礎,為這些項目節省試驗經費、縮短試驗周期提供支持,具有非常可觀的經濟效益和較好的社會效益。
參考文獻:
[1]周健,馮慶奇,馬曙光,等.參考光束型激光多普勒測速儀的誤差分析[J].強激光與粒子束,2010,22(11):2581-2587.
[2]王曉維,梁應劍,李翔,等.基于光學多普勒頻移的低空速測量方法研究[J].激光技術,2016,40(5):629-632.
[3]梁應劍,梅運橋,程麗媛,等.基于米散射的光學大氣數據系統研究[J].測控技術,2015,34(1):32-34.
[4]江娜,程湛.在飛機增壓艙加裝光學玻璃的可行性分析[J].中國科技信息,2011(18):92-93.
[5]孫友師.光學大氣數據測量系統的發展研究[G]//2010年航空試驗測試技術峰會論文集.上海:中國航空學會,2010.
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
環球時報(2022-05-30)2022-05-30 15:16:57
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27