縮比模型尾旋自動進入及改出控制律初探
2018-05-05 07:48:00韓意新方自力李藝海
科技與創新 2018年9期
韓意新,方自力,李藝海
(中國飛行試驗研究院,陜西 西安 710089)
尾旋是飛機最復雜和最危險的飛行狀態之一,直接危及飛行員和飛機的安全。作為飛行禁區的尾旋,被世界航空界形象地稱為“死亡螺旋”。國外航空發達國家非常重視尾旋的研究工作,為驗證第三、四代戰斗機尾旋機動能力,開展了大量的縮比模型自由飛試驗,利用模型自由飛探索尾旋進入、改出方法,研究有利于弄清尾旋發生、發展機理,有效保障飛行安全。本文利用縮比模型,探索了尾旋自動進入、改出方法,研究結果可供相關研究人員參考。
1 縮比模型控制系統組成
飛行控制系統是縮比模型的控制指揮中心,主要由飛行控制芯片、傳感器系統和執行機構3大部分組成。其中,飛行控制芯片在整個系統中處于核心地位,它根據輸入的控制指令采集傳感器提供的參數,按照設計的控制算法及邏輯產生控制指令,通過控制執行機構以實現對縮比模型飛行的控制。本文選用的芯片信號為STM32F427VI。傳感器系統是為飛行控制提供各種飛行參數的裝置,包括測量三軸角速率的陀螺組,測量三軸線加速度的加速度計組,測量航向的羅盤,測量位置、高度、速度等信息的GPS、高度計、空速計等。舵機是縮比模型上的執行機構,它的作用是將接收的電信號轉變成機械位移量,帶動舵面或發動機油門偏轉,實現對飛機姿態位置或發動機轉速的控制。舵機的控制信號采用PWM脈寬調制信號,控制信號對舵機的控制就是改變PWM信號的占空比,利用占空比的變化改變舵機位置。此外,飛行控制系統還包括“遙控—自主”切換開關、Futaba遙控器、遙控信號接收器、無線通訊模塊和地面遙控遙測控制臺等鏈路系統組件。
2 尾旋自動進入控制律
尾旋自動進入控制律分為2部分,原理圖見圖1,第一部分為按減速率的拉桿模塊,第二部分為尾旋進入操縱模塊。首先由航模操縱手將發動機置于慢車狀態,保持高度,空速穩定后啟動尾旋自動進入控制律。
按減速率的拉桿模塊:縱向通過空速反饋計算拉桿量,以維持1 kn/s的減速率;橫航向啟動姿態保持模式。
尾旋進入操縱模塊:迎角超過一定門限后,施加蹬滿舵操縱。待尾旋圈數、尾旋時間或飛機高度達到一定門限后自動啟動尾旋自動改出控制律。

圖1 尾旋自動進入控制律原理圖
3 尾旋自動改出控制律
在尾旋改出過程中,由于航模操縱手注意力不集中等心理因素,往往反應滯后,甚至有可能進行錯誤操縱,導致飛機加速進入尾旋。
本文設計了尾旋自動改出控制律,其原理圖見圖2.與人工尾旋改出相比,自動尾旋改出具有改出操縱正確、改出時間短、能防止再次進入尾旋等優點。
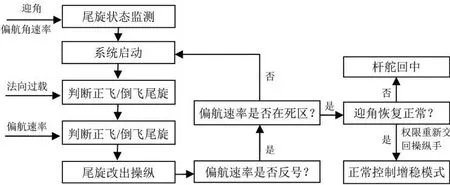
圖2 尾旋自動改出控制律原理圖
尾旋的自動改出控制律分2部分,第一部分為尾旋識別模塊,第二部分為尾旋改出操縱模塊。
尾旋識別部分:通過迎角及偏航角速率判斷航模此時是否處于尾旋狀態,通過法向過載識別正飛/倒飛尾旋,通過偏航角速率方向識別尾旋方向。
尾旋改出操縱模塊:根據尾旋識別模塊提供的信息,施加反舵、桿回中的反尾旋操縱,并保持上述操縱直至偏航速率出現反號并在死區范圍內,隨后桿舵回中。待迎角恢復正常后,控制律自動切回正常控制增穩模式,控制權限重新交回航模操縱手中。
4 結束語
通過實際試飛驗證,系統能可靠地進入及改出尾旋,后續可進一步開展帶推力矢量大迎角控制律開發。
參考文獻:
[1]中華人民解放軍總裝備部.GJB 3814—99軍用飛機失速/過失速/尾旋試飛驗證要求[S].[出版地不詳],1999.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03