分布式電動(dòng)車轉(zhuǎn)向電液復(fù)合制動(dòng)控制
2018-05-24 03:26:33肖旭輝
汽車實(shí)用技術(shù) 2018年2期
關(guān)鍵詞:分配
肖旭輝
(長安大學(xué)汽車學(xué)院,陜西 西安 710064)
引言
分布式驅(qū)動(dòng)電動(dòng)汽車由于電機(jī)單獨(dú)可控,可通過附加直接橫擺力矩來提升車輛的穩(wěn)定性能[1]。且電機(jī)具有響應(yīng)速度快,控制精確快速的優(yōu)點(diǎn),但輸出的力矩有限[2]。現(xiàn)在的電動(dòng)汽車制動(dòng)過程中,除了可以用傳統(tǒng)的液壓制動(dòng)系統(tǒng)外,還可以通過電機(jī)的回饋制動(dòng)在給車輛制動(dòng)力的同時(shí)給車載電池充電[3]。
對(duì)于分布式驅(qū)動(dòng)電動(dòng)汽車制動(dòng)力的分配,一方面要考慮回饋制動(dòng)力與摩擦制動(dòng)力之間的分配比例,盡可能提高能量回收效率;另一方面,由于考慮法規(guī)的限制和穩(wěn)定性要求,汽車后軸應(yīng)具有一定的制動(dòng)強(qiáng)度,因此還須考慮前后軸制動(dòng)力的分配,和各車輪的制動(dòng)力分配[4]。
本文提出了一種基于穩(wěn)定性加權(quán)系數(shù)的分層控制的電液制動(dòng)力復(fù)合分配策略,使制動(dòng)力矩分配既能滿足穩(wěn)定性需求又能使在當(dāng)前工況下經(jīng)濟(jì)性能最大化,并通過仿真進(jìn)行驗(yàn)證。
1 電液復(fù)合制動(dòng)控制策略
本文采用分層控制結(jié)構(gòu),包括上層狀態(tài)控制器和下層分配控制器,如圖1所示。
1.1 橫擺力矩控制
為了求得理想的橫擺力矩,本文采用線性二自由度汽車模型作為求上層控制力的參考模型,如圖2所示。
二自由度車輛動(dòng)力學(xué)方程如下:

其中
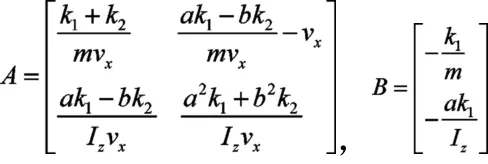
式中:△M為附加橫擺力矩;Iz為汽車?yán)@z軸轉(zhuǎn)動(dòng)慣量;ωr為橫擺角速度;K1,K2分別為前后輪的側(cè)偏剛度;m為整車質(zhì)量;a,b分別為汽車質(zhì)心至前后軸中心線的距離;vx,vy分別為質(zhì)心速度在縱向和橫向的分量。
令,可得穩(wěn)態(tài)橫擺角速度和前輪轉(zhuǎn)角的關(guān)系:

考慮路面附著極限,可得理想橫擺角速度為:

狀態(tài)量ωr的系統(tǒng)非線性方程為:

式中Fyf和Fyr分別是前后軸的側(cè)向力。
選擇滑模面為:

其中,λ為和收斂速度有關(guān)的正常數(shù),e=ωr-ωrd。
令可得等效控制率

令控制率u=ueq-k·sgn(s)
k為正常數(shù),sgn(s)為符號(hào)函數(shù)。
由于控制率中含有符號(hào)函數(shù),會(huì)使系統(tǒng)到達(dá)滑移面時(shí)發(fā)生抖振,為了消除抖振,本文引入邊界層,即采用飽和函數(shù)替代符號(hào)函數(shù),在邊界層外采用正常的滑模控制,在邊界層內(nèi)采用連續(xù)狀態(tài)的反饋控制[5]。令飽和函數(shù)為:

ψ為邊界層厚度,本文取0.1。
綜上可得到控制率u=ueq-k·sat(s)
1.2 前后軸制動(dòng)力分配
為了滿足安全性的需要,汽車的前后軸制動(dòng)力分配區(qū)域必須包含在由I曲線、f曲線和ECE R13法規(guī)曲線三條曲線所確定的區(qū)間內(nèi),將汽車參數(shù)和路面附著系數(shù)代入三條曲線方程,根據(jù)制動(dòng)強(qiáng)度直線即可求出與分配區(qū)域的上下邊界的交點(diǎn)A、B,即可求出兩點(diǎn)之間的線段距離,再乘以穩(wěn)定性系數(shù)k即可求得在AB連線上所需的分配點(diǎn)k,所對(duì)應(yīng)的橫縱坐標(biāo)即為前后軸制動(dòng)力。

圖3 前后軸制動(dòng)力分配圖
1.3 穩(wěn)定性權(quán)重系數(shù)求解器
本文提出穩(wěn)定性權(quán)重系數(shù)k,則經(jīng)濟(jì)性權(quán)重系數(shù)為1-k。對(duì)應(yīng)系數(shù)的大小就表明了此時(shí)汽車是該以穩(wěn)定性為主還是該以經(jīng)濟(jì)性為主。
以制動(dòng)意圖和路面附著系數(shù)作為穩(wěn)定性加權(quán)系數(shù)模糊控制求解器的輸入?yún)?shù)。
模糊求解器的求解規(guī)則為:制動(dòng)減速度越大,k值越大,路面附著系數(shù)越大,k值越小。
制動(dòng)減速度和路面附著系數(shù)的隸屬度函數(shù)見下圖。
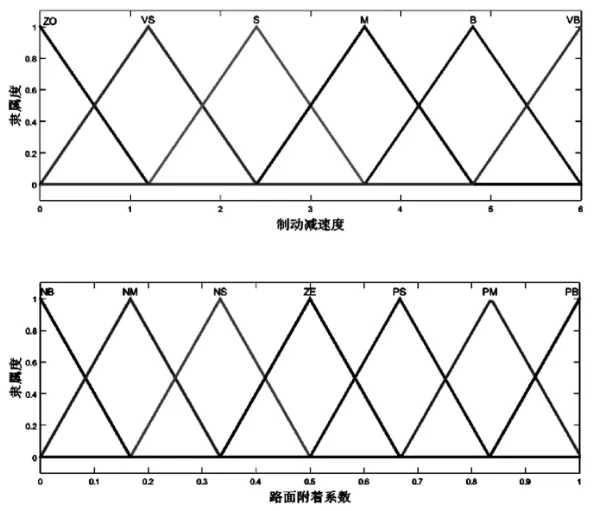
圖4 制動(dòng)減速度和路面附著系數(shù)隸屬度函數(shù)圖
1.4 各個(gè)車輪的制動(dòng)力分配
系統(tǒng)目標(biāo)函數(shù)應(yīng)該結(jié)合穩(wěn)定性和經(jīng)濟(jì)性才能保證汽車穩(wěn)定行駛下又能保證汽車處于能效最高。
對(duì)于穩(wěn)定性目標(biāo)函數(shù),以輪胎利用率最小為分配優(yōu)化目標(biāo)。

式中:輪胎的橫向力FY和縱向力FX之間滿足輪胎橢圓關(guān)系,通過魔術(shù)輪胎模型即可把兩者解耦。ηi為車輪的路面附著利用率,車輪的路面附著利用率越低,表示車輪的剩余附著能力越高,意味著此車輪的穩(wěn)定性越高。
汽車的經(jīng)濟(jì)性目標(biāo)函數(shù)為各電機(jī)的效率之和。

Tf1、Tf2分別為左前輪和右前輪的電機(jī)制動(dòng)轉(zhuǎn)矩,Ireq為需求制動(dòng)轉(zhuǎn)矩,η(Tf1,n)、η(Tf2,n)為前軸左右電機(jī)效率,Je越大經(jīng)濟(jì)性越好。
本文引入之前求得的穩(wěn)定性加權(quán)系數(shù)作為系統(tǒng)能效目標(biāo)函數(shù)的加權(quán)系數(shù)。

電機(jī)的回饋制動(dòng)轉(zhuǎn)矩主要受轉(zhuǎn)矩轉(zhuǎn)速特性、電池狀態(tài)、車速等參數(shù)的影響,其制動(dòng)轉(zhuǎn)矩表達(dá)式如下:
式中:Treg表示電機(jī)的回饋制動(dòng)力矩,PN為電機(jī)額定功率,nb為電機(jī)基速,n為電機(jī)轉(zhuǎn)速。
電機(jī)的回饋制動(dòng)在較低的車速時(shí),由于反電動(dòng)勢(shì)的迅速減少,制動(dòng)能力會(huì)明顯下降,為了保證行駛安全性,對(duì)電機(jī)設(shè)置一個(gè)最低安全轉(zhuǎn)速要求,所以引入最低轉(zhuǎn)速要求的電機(jī)回饋制動(dòng)力矩為:

式中:

所以對(duì)于本文采取的前驅(qū)分布式驅(qū)動(dòng)電動(dòng)車,整個(gè)系統(tǒng)優(yōu)化目標(biāo)函數(shù)就可以整理為設(shè)計(jì)變量u=[FXfl,FXfr,FXrl,FXrr]T,求解maxJ。約束條件為:
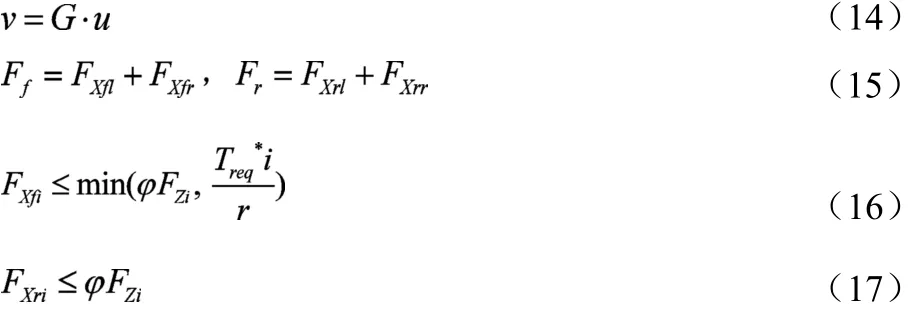
式中Ff和Fr分別為前后軸制動(dòng)力,本文優(yōu)先采用電機(jī)控制策略,在電池SOC達(dá)到飽和(SOC=0.8)之后再將制動(dòng)力分配給液壓系統(tǒng),由于本次實(shí)驗(yàn)為少次實(shí)驗(yàn),所以SOC的影響可以不考慮。
2 仿真與驗(yàn)證
本文仿真的實(shí)驗(yàn)工況選取 IOS3888-1∶1999(E)標(biāo)準(zhǔn)雙移線工況,在仿真過程中令穩(wěn)定性加權(quán)系數(shù)為0.6。
圖6為實(shí)驗(yàn)仿真結(jié)果圖,展示了橫擺角速度變化曲線,由圖可以看出,采用了本文分配算法的分布式驅(qū)動(dòng)電動(dòng)汽車能夠很好的跟隨理想的橫擺角速度。
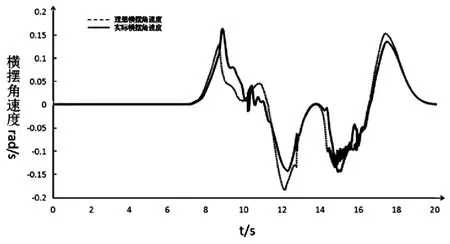
圖5 橫擺角速度變化曲線
圖6為車輛的運(yùn)動(dòng)軌跡圖,從圖6a可以看出電液復(fù)合制動(dòng)算法的車輛的軌跡和預(yù)設(shè)軌跡偏差很小,圖6b中的無分配算法的傳統(tǒng)控制車輛產(chǎn)生了較大的偏移,因此由圖中的車輛路徑可以看出,采用本文的控制分配的電動(dòng)車能很好的跟隨路徑,在轉(zhuǎn)彎過程中能夠保證足夠的安全性。

圖6 車輛運(yùn)動(dòng)軌跡
3 結(jié)論
針對(duì)分布式驅(qū)動(dòng)電動(dòng)汽車,考慮在彎道制動(dòng)過程中,既能保證車輛行駛穩(wěn)定性又能兼顧制動(dòng)能量回收,本文提出了一種帶穩(wěn)定性加權(quán)系數(shù)的電動(dòng)車電液復(fù)合制動(dòng)的控制方法。該控制方法,采用分層結(jié)構(gòu),分別設(shè)計(jì)了上層的狀態(tài)控制器和下層的分配控制器。通過對(duì)所提出的控制方法進(jìn)行仿真驗(yàn)證,可以看出,車輛在轉(zhuǎn)向制動(dòng)時(shí),采用本文提供的控制方法可以有效提高車輛的穩(wěn)定性,并且能充分發(fā)揮再生制動(dòng)的優(yōu)點(diǎn),提高車輛的經(jīng)濟(jì)性和整車系統(tǒng)能效。
參考文獻(xiàn)
[1] Xiong L, Yu Z, Wang Y, et al. Vehicle dynamics control of four inwheel motor drive electric vehicle using gain scheduling based on tyre cornering stiffness estimation[J]. Vehicle System Dynamics,2012, 50(6)∶831-846.
[2] de Castro R, Araújo R E, Tanelli M, et al. Torque blending and wheel slip control in EVs with in-wheel motors[J]. Vehicle System Dyna-mics, 2012, 50(sup1)∶ 71-94.
[3] HUANU Xiaoyu, WAND Junmin. Model predictive regenerative braking control for lightweight electric vehicles with in-wheel motors[J]. Journal of Automobile Engineering, 2012,226(9)∶ 1220- 1232.
[4] Ehsani M, Gao Y, Emadi A. Modern electric, hybrid electric, and fuel cell vehicles∶fundamentals,theory,and design[J].2009,volume 23(10)∶949-966(18).
[5] 劉金琨,孫富春.滑模變結(jié)構(gòu)控制理論及其算法研究與進(jìn)展[J].控制理論與應(yīng)用, 2007, 24(3)∶407-418.
猜你喜歡
天水行政學(xué)院學(xué)報(bào)(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會(huì)主義學(xué)院學(xué)報(bào)(2017年1期)2017-04-16 05:34:07
中國衛(wèi)生(2014年12期)2014-11-12 13:12:40
