無人機軌道跟蹤控制模型*
2018-05-25 05:39:50劉成,任利惠,左建勇
城市軌道交通研究 2018年5期
隨著科技的進步,民用無人機技術已經成熟,現已經廣泛應用于地圖測繪、地質勘測、災害監測、氣象探測、空中交通管制、邊境巡邏監控、通信中繼、農藥噴灑等作業中。在鐵路上,無人機也得到應用,例如在杭州至海寧城際鐵路項目中,利用無人機采集線路及車站站點圖像,輔助進行路線規劃和設計[1]。
目前,計算機視覺技術憑借著檢測方法簡單、檢測設備無磨損、使用壽命長、維護簡單等諸多優點,廣泛使用于很多行業和場景,如車牌識別、交通管理、人臉識別、零件檢測等。但是機器視覺在鐵路方面的應用較少,還處于發展階段。民用領域運用的無人機飛行需手動控制,自動飛行功能只能作為輔助飛行方式。因此,采用嵌入式系統進行直接圖像處理,只傳輸必要的圖像數據至地面站,并將處理完成的軌道信息作為無人機的控制信息,調整無人機的飛行方向,實現無人機領域的虛擬軌道飛行,是一個具有價值的研究方向[13]。采用這種方式能實現沿軌道無人機自動飛行與控制,充分發揮無人機、機器視覺的能力,在洪災、地震、山體滑坡等自然災害發生時,為了解軌道交通線的破壞情況,該方法具有很強的實用性和一定的遠景應用價值。本文對無人機技術與計算機視覺技術進行結合,并將其應用于軌道交通領域,對使用計算機視覺技術實現無人機跟蹤軌道飛行進行了探索,搭建了一個無人機圖像采集與處理平臺,對利用機器視覺實現無人機軌道跟蹤控制模型進行驗證。
1 方案設計
利用無人機、機載成像設備和計算機搭建了一個無人機軌道跟蹤控制模型,如圖1所示。
該模型的原理是利用機載成像設備對軌道區域進行成像,并將圖像數據傳至機載計算機進行圖像處理,圖像處理的結果傳輸至無人機控制系統,對無人機的飛行方向進行控制。

圖1 無人機軌道跟蹤飛行示意圖
2 圖像處理
該模型中最重要的部分是軌道圖像的識別,本文利用OpenCV計算機視覺庫,在Microsoft Visual Studio軟件中對無人機采集的圖像進行處理,實現了對軌道的識別。
2.1 圖像載入與分割
圖像處理的第一步是進行圖片載入。本系統功能驗證采用的機載成像設備所獲取的圖片大小為1 920像素×1 080像素。在圖像處理過程中,未預先處理的圖片不僅會造成圖像處理時間長,還會在調試過程造成圖片顯示異常。因此,在載入讀片后,對圖片的寬度與高度作等比例縮小,縮小后的圖片寬度設置為500像素。為了實現對軌道區域的檢測,減小圖像處理的時間,需要對圖像進行適當分割。在該程序中,選擇了圖像下部2/3,距離左、右兩側1/5的區域為檢測區域,并將其分割成獨立的圖像,以提高圖像處理的速度。輸入圖像和分割后的圖像如圖2所示。
2.2 色彩空間轉換與濾波
在本系統中,Canny邊緣檢測等函數的輸入圖像為單通道8位圖像,因此需要對輸入的彩色圖像進行色彩空間轉換。為此,本設計在載入圖像后,將彩色圖片轉換為灰度圖。
圖像濾波是指在保留源圖像特征條件下,抑制圖像中的噪聲,選擇合適的濾波方法與濾波參數,能提高后續圖像處理的可靠性和有效性。圖像濾波有兩條原則,不能破壞圖像的輪廓和邊緣等信息,以及保持濾波后的圖像視覺效果好、圖像清晰。通常采用的濾波方法有方框濾波、均值濾波、高斯濾波、中值濾波、雙邊濾波等5種。本設計采用高斯濾波法。

圖2 載入圖像并分割

式中:
A——幅值;
x0,y0——圖片中心點的橫、縱坐標;
σx,σy——像素值的均方差。
在OpenCV計算機視覺庫中,高斯濾波函數為GaussianBlur(),有6個輸入參數,分別為輸入矩陣、輸出矩陣、高斯內核大小、x方向的標準差、y方向的標準差和圖像外部像素的邊界類型。本設計中采用的內核大小為3×3,x與y方向的標準差都為0。
2.3 軌道連通區域檢測
軌道區域在圖像中是連續存在的,且鋼軌的顏色較深,即灰度值小。根據這一特性,可采用檢測連通區域的方法,將鋼軌區域從圖像中識別出來。連通區域檢測是本設計的核心,是成功實現軌道識別的關鍵一步。
識別連通區域時,本文選擇了最大穩定極值區域算法(MSER)。MSER的基本原理是:對灰度圖像(灰度值為 0~255)進行二值化處理,閾值從 0到255逐漸遞增。在處理完成后的所有二值圖像中,圖像中的某些連通區域變化很小或者無變化,則稱該區域為最大穩定極值區域[2-10]。它的數學定義為:

高斯濾波是一種根據高斯函數的形狀來選擇濾波權值的線性濾波,可有效消除高斯噪聲。通常采用二維零均值離散高斯函數作為圖像的濾波函數。二維高斯函數為:
式中:
Qi——閾值為i時的某個連通區域的面積;
Δ——灰度閾值變化量;
q(i)——閾值為i時的Q區域的變化率。
當q(i)為局部極小值時,Qi則為最大穩定極值區域。
OpenCV計算機視覺庫中使用MSER()函數對圖片的連通區域進行檢測,其輸出結果為向量點集,其中每一個點集都是一個連通域。得到連通域后,對連通域進行矩形包圍,并計算每個矩形間的重疊面積。接著對矩形面積進行排序,依次計算相鄰兩個矩形的重疊率,當矩形重疊率大于一定閾值(本設計中取0.3)時,將小的連通域排除。通過這種方法,可以彌補進行MSER檢測時最小閾值可能設置太小帶來的問題,并且可以將實際的鋼軌區域進一步從連通區域剝離出來,減少軌道周圍物體的干擾。檢測結果見圖3。
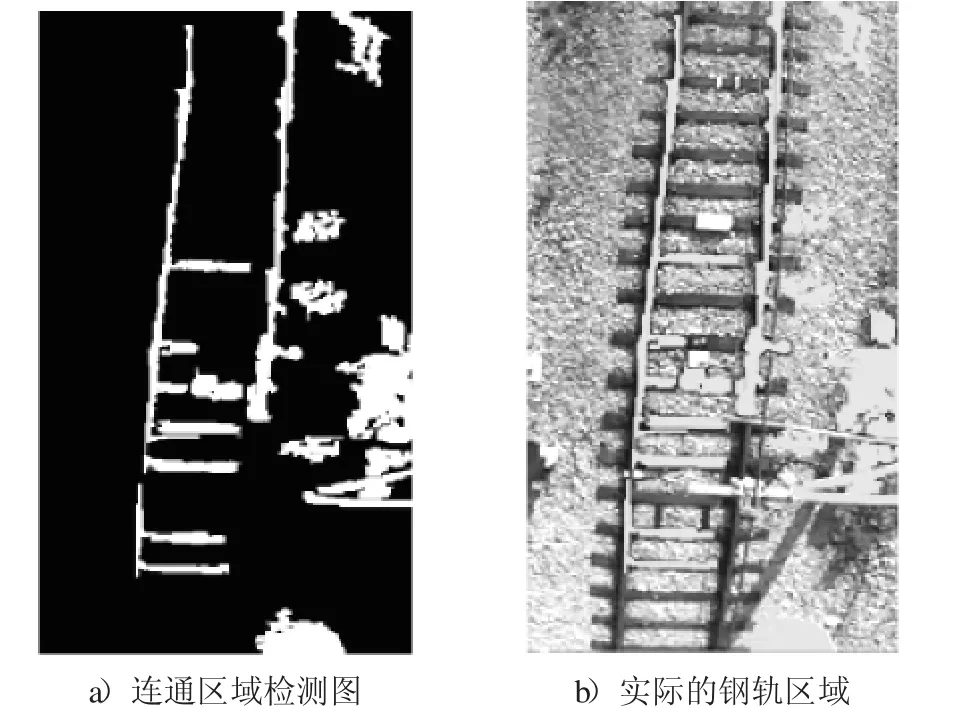
圖3 鋼軌連通區域檢測
在完成鋼軌的連通區域檢測后,會發現連通區域不僅僅只有鋼軌區域,軌枕等區域也會被檢測出來,這是由于軌枕顏色、形狀等與鋼軌類似。為了提取出鋼軌并進行鋼軌區域分割,還需對連通區域進行邊緣檢測和直線檢測。
2.4 邊緣檢測
針對連通區域的檢測,本設計采用了Canny邊緣提取算法[11]。本設計中,在進行邊緣檢測前,選擇了3×3的高斯模糊函數對圖像進行濾波,并將處理得到的邊緣圖與連通區域進行與運算,得到鋼軌區域的邊緣圖(見圖4)。
2.5 霍夫直線檢測
經過上述邊緣檢測步驟后,得到了鋼軌區域的邊緣圖(見圖4 b))。在邊緣圖中,采用霍夫直線檢測算法提取鋼軌。霍夫變換是圖像處理中的一種直線特征提取技術。該過程在一個參數空間中通過計算累計結果的局部最大值,得到一個符合該特定形狀的集合作為霍夫變換結果。
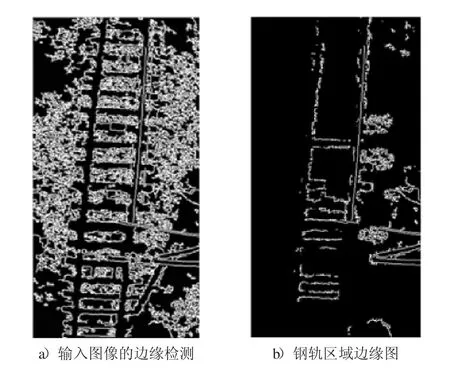
圖4 邊緣檢測
霍夫經典變換輸出的矩陣中存儲有檢測出的直線矢量,每一條直線用具有2個元素的矢量(ρ,θ)表示,其中ρ表示直線到原點(圖像左上角)的距離,θ表示直線與y軸之間的夾角(弧度,逆時針為正)。由于檢測輸出結果只有直線的相對位置信息,并不包含直線長度信息,因此直線的長度可以自由設定。
考慮到檢測出的直線數可能大于2條,需對檢測得到的直線進行篩選。通常情況下,圖像中軌道近似于直線,其在圖像中的長度也是最長的,因此可以計算出每條直線的長度,選出所有直線中的最長2條直線,作為2條軌道線。在計算檢測出直線長度時,考慮到采集的圖像高度比寬度大,直接計算每條直線與圖像上、下邊界的交點(x上,y上)、(x下,y下)。在OpenCV計算機視覺庫中坐標系如圖5所示,圖像的左上角點為原點,長度方向為x軸,高度方向為y軸,因此y上=0,y下等于圖像的高度,所以只需計算每個點的橫坐標即可。圖像的長度為l,高度為h,第i條直線的位置矢量為(ri,θi),則該條直線的2個交點的橫坐標值計算式為:

完成鋼軌區域的直線檢測后,計算每條直線在圖像中的長度,并對直線進行兩兩比較,篩選出最長的2條直線,視為鋼軌,結果如圖6所示。
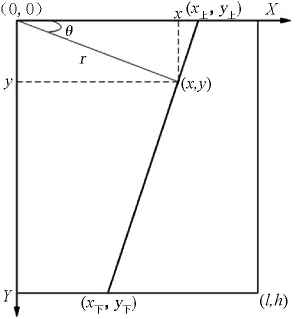
圖5 直線位置示意圖

圖6 直線檢測結果圖
完成直線檢測后,計算兩直線在輸入圖像中的坐標和軌道中心線與輸入圖片上下邊界交點的坐標,并將結果輸出給無人機控制系統,對無人機的飛行方向進行調整[12]。
2.6 圖像處理的試驗結果
利用搭建的無人機平臺采集了同濟大學軌道交通綜合試驗線大量圖像資料并進行了處理,從表1中可以得出,軌道識別正確率約為82.87%,錯誤率約12.35%,漏識別率為4.78%。

表1 軌道識別結果
3 結語
利用機載成像設備對軌道區域進行成像,并進行實時處理,將無人機相對軌道的位置信息傳輸至無人機控制系統,以控制無人機沿軌道自動飛行,其具有實現的可能性。
由于基于無人機的機器視覺在鐵路上應用較少,有很多研究工作有待進行,包括多種影像獲取(紅外、多光譜、合成孔徑雷達成像等)和更多鐵路方面應用的研究(軌距測量、障礙物識別、扣件檢測等),以及開發具有快速圖像處理能力的嵌入式系統等。
參考文獻
[1] 姜林波.無人機視頻采集在軌道交通設計中的應用[J].交通建設,2016(4):229-230.
[2] 毛星云,冷雪飛.OpenCV3編程入門[M].北京:電子工業出版社,2015.
[3] KAEHLER A,BRADSKI G.Learning OpenCV3 computer vision in C++With the opencv library[M].Sebastopol,CA,USA:O′Reilly Media,Inc.,2017.
[4] 向榮,蔣榮欣.鐵路機車快速超視距障礙物識別算法[J].湘潭大學自然科學學報,2013,35(2):103-108.
[5] 王昆.基于機器視覺對的軌道幾何特征提取算法研究及實現[D].上海:上海工程技術大學,2015.
[6] 同磊.基于機器視覺的軌道交通線路異物檢測技術研究[D].北京:北京交通大學,2012.
[7] SINGH M,SINGH S,JAISWAL J,et al.Autonomous rail track inspection using vision based system[C]∥IEEE International Conference on Computational Intelligence for Homeland Security and Personal Safety.Alexandria,VA,USA:IEEE,2006:56-59.
[8] RESENDIZ E,HART M,AHUJA N.Automated visual inspection of railroad tracks [J].IEEE Transactions on Intelligent Transportation Systems.2013,14(2):751-760.
[9] JARRETT C,PERRY K,STOL K A.Controller comparisons for autonomous railway following with a fixed-wing UAV[C]∥Proceedings of the 6th International Conference on Automation,Robotics and Applications,Queenstown,New Zealand:IEEE,2015:104-109.
[10] SONKA M,HLAVAC V.圖像處理、分析與計算機視覺[M].北京:清華大學出版社,2016.
[11] 巨西諾,孫繼銀.一種改進的基于MSER算法的不變量提取算法[J].貴陽:貴州工業大學學報,2008,37(6):49-52.
[12] 李丹丹,侯濤,魏世鵬.基于改進Canny算子的鐵軌邊緣檢測方法[J].電視技術,2015,39(8):55.
[13] 鄭家良.無人機航跡規劃與導航的方法研究及實現[D].成都:電子科技大學,2012.
[14] 李丹丹,侯濤,魏世鵬.基于改進Canny算子的鐵軌邊緣檢測方法[J].電視技術,2015,39(8):55-58.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
