一種優化網絡生存時間的移動傳感節點覆蓋調度算法
2018-05-25 06:36:41楊海波陳友榮劉半藤祝云凱蘇子漪
電信科學 2018年5期
關鍵詞:區域
楊海波,陳友榮,劉半藤,祝云凱,蘇子漪
(1.浙江樹人大學信息科技學院,浙江 杭州 310015;2.浙江杭佳科技發展有限公司,浙江 杭州 310015)
1 引言
在無線傳感網(wireless sensor network,WSN)中,節點的能量約束限制了網絡覆蓋、生存時間等基本功能。網絡高覆蓋能確保從傳感節點收集的數據準確表示監控區域。根據感知對象的不同,網絡覆蓋可分成目標覆蓋、柵欄覆蓋和區域覆蓋。其中,目標覆蓋要求傳感節點能覆蓋到所有目標點。當目標點遍布于監測區域且數量足夠多時,目標覆蓋問題可轉換成區域覆蓋問題。柵欄覆蓋要求傳感節點能完整覆蓋一條直線。當直線數量足夠多時,柵欄覆蓋問題也可轉換成區域覆蓋。區域覆蓋問題是網絡覆蓋的基本問題之一,可應用到環境監測、智慧工廠、入侵檢測等多個領域[1-3]。同時,網絡生存時間是指WSN從整個網絡收集數據的有效工作時間。網絡生存時間越大,則WSN的壽命越長,其應用成本越短,因此在環境監測等應用領域,WSN的設計應保持令人滿意的區域覆蓋和持續幾個月或幾年時間收集所需的感測數據(如溫度),并傳輸給基站[4,5]。
目前許多研究側重于同構無線傳感網(所有傳感節點具有相同的性能,如安裝有相同的傳感器、其位置都靜止或都可以移動)的網絡覆蓋問題,如參考文獻[6]考慮每一個傳感節點的數據感知具有方向性,建立和采用列生成法求解生存時間優化模型。參考文獻[7]建立和求解最小工作傳感節點個數和最大網絡覆蓋的優化模型,確定每一個傳感節點的工作調度。參考文獻[8]將監測區域分成多個網格,每一個網格的傳感節點選擇成為簇頭和成員,并采用一種權值計算式和提出傳感節點的移動選擇算法。參考文獻[9]提出最大每一個移動傳感節點的覆蓋率和最大所有移動傳感節點覆蓋率的多目標優化模型,并求解該優化模型獲得最優解。總之,參考文獻[6,7]考慮傳感節點的位置固定不變。參考文獻[8,9]考慮所有傳感節點都可移動。而且參考文獻[6-9]考慮同構傳感節點,但是在一些特殊應用中,傳感節點存在感知范圍、能量等方面的異構。
隨著無線傳感網應用領域的不斷擴大,同構無線傳感網已經不能滿足實際應用的需要,如在無線傳感網的典型應用——環境監測中,需要監測大氣溫度、濕度、光照強度等環境信息。顯然每個傳感節點不可能同時安裝所有傳感器,需要考慮安裝有不同類型的傳感器,即感知半徑不同的異構傳感節點。因此一些學者研究異構傳感節點的覆蓋問題,如參考文獻[10]提出一種基于多重覆蓋算法的異構節點調度算法。該算法建立覆蓋率最大和工作節點數量最小的多目標優化模型,采用差分進化算法求解獲得最優方案。參考文獻[11]將覆蓋問題轉換成多個直線的覆蓋問題,并建立直線覆蓋的傳感節點移動優化模型。采用線性求解算法求解獲得最短移動路徑。但是參考文獻[10,11]是集中式方法,其計算量隨著傳感節點個數的增加而急劇增大。參考文獻[12]根據鄰居覆蓋集合的信息,提出傳感節點的調度,從而最小覆蓋監測區域且保證網絡連接。參考文獻[13]根據鄰居節點的不同位置,采用冗余方法對自身節點進行判斷。如果判斷冗余,則關閉冗余節點。雖然參考文獻[12,13]是分布式方法,但是這些算法都沒有考慮網絡生存時間,也沒有考慮當樞紐傳感節點失效時覆蓋盲區的修復問題。同時參考文獻[10-13]只是考慮異構靜態傳感節點的調度,沒有考慮異構傳感節點的移動性,容易出現能量空穴問題,因此部分學者考慮異構傳感節點的移動,研究異構移動傳感節點的覆蓋問題,如參考文獻[14]根據傳感節點的數量,判斷每一個網格的負載,負載高的網格中部分傳感節點向負載低的網格移動。參考文獻[15]在位置進化中考慮異構傳感節點間的虛擬力,提出虛擬力導向差分算法,從而優化覆蓋率。參考文獻[16]考慮監控區域內存在覆蓋盲點,提出一種能耗最小和感知覆蓋最大的覆蓋洞修補算法,獲得異構傳感節點的移動規劃路徑。但是參考文獻[14-16]都是集中式算法,其算法計算量較大,一般只適合傳感節點數量較少的網絡,而且只是考慮所有傳感節點具有移動性,需要配置移動設備和大功率的電池,大大增加了無線傳感網部署的成本。
綜上所述,目前同構靜態或移動傳感節點的覆蓋優化算法沒有考慮傳感節點的異構性。異構靜態傳感節點的覆蓋優化算法同樣存在能量空穴問題。異構移動傳感節點的覆蓋優化算法主要偏向于假設所有傳感節點具有移動性,具有較大的硬件成本,且側重于集中式方法,較少涉及分布式算法。因此在上述參考文獻的基礎上,為降低系統的硬件成本,考慮環境監測等應用中同時存在異構靜態傳感節點和少量移動傳感節點。當網絡啟動后,靜態傳感節點的分布不均勻造成覆蓋盲區,或者當網絡運行一段時間后,部分靜態傳感節點因能量耗盡而死亡,造成網絡覆蓋盲區時,利用傳感節點的移動,提出一種優化網絡生存時間的移動傳感節點覆蓋調度算法(coverage scheduling algorithm,CSA)。在CSA中,靜態傳感節點根據鄰居靜態傳感節點的信息,發現靜態傳感節點的覆蓋盲區和估計移動傳感節點的停留位置,廣播通知移動傳感節點。同時建立移動傳感節點的移動優化模型,分布式求解該優化模型,獲得異構移動傳感節點的分布式移動策略,修補覆蓋盲區,從而保證最大網絡覆蓋,盡可能提高網絡生存時間和降低算法的時間復雜度。
2 網絡模型和算法設計
在CSA中作出如下假設。
(1)在二維的無線傳感網中,同時存在靜態傳感節點、移動傳感節點和靜態sink節點。移動傳感節點可移動到監控區域的任一位置。
(2)傳感節點的感知覆蓋異構,即每一個傳感節點的感知覆蓋半徑不一致。
(3)傳感節點通過 GPS、北斗等衛星定位模塊或其他定位算法,獲知自身的位置坐標。
(4)靜態傳感節點可處于工作狀態或者睡眠狀態。處于工作狀態的傳感節點定時感知數據,并將數據發送給sink節點。
(5)傳感節點具有相同的通信半徑和初始能量,且采用如下數據發送和接收能耗計算式計算自身能耗。
其中,Efa表示節點數據發送能耗,Ejie表示節點數據接收能耗,Dataij表示傳感節點i需要發送給鄰居傳感節點j的數據量,Eelec表示數據處理能耗參數,εfs表示數據發送能耗參數,dij表示傳感節點i到鄰居傳感節點j的距離。
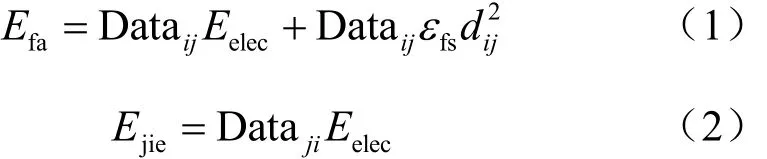
傳感節點隨機分布在監測區域內且需要獲知自身的位置,如圖1所示。每一個傳感節點具有不同的感知半徑。當網絡運行后,靜態傳感節點分析周圍鄰居傳感節點的位置和剩余能量狀態,判斷是否存在覆蓋盲區。采用少量的移動傳感節點修補覆蓋盲區,從而提高感知覆蓋和網絡生存時間。但是CSA仍需要解決以下3個問題:靜態傳感節點如何根據鄰居傳感節點的位置、剩余能量等信息,判斷其周圍是否存在覆蓋盲區,并估計移動傳感節點的停留位置;如何根據停留位置,建立移動傳感節點的覆蓋調度模型;如何分布式求解覆蓋調度模型,從而移動傳感節點可移動到合適位置,修補覆蓋盲區,提高網絡生存時間。這3個問題的具體解決如下。
2.1 停留位置計算
當網絡運行后,主要存在兩種覆蓋盲區的生成情況。一種是傳感節點的能量耗盡,則其負責的覆蓋區域出現覆蓋盲區,此時直接將該傳感節點的位置作為移動傳感節點的停留位置。另一種是由于傳感節點位置分布的隨機性,傳感節點部署后出現覆蓋盲區,此時采用如下方法確定移動傳感節點的可選停留位置。
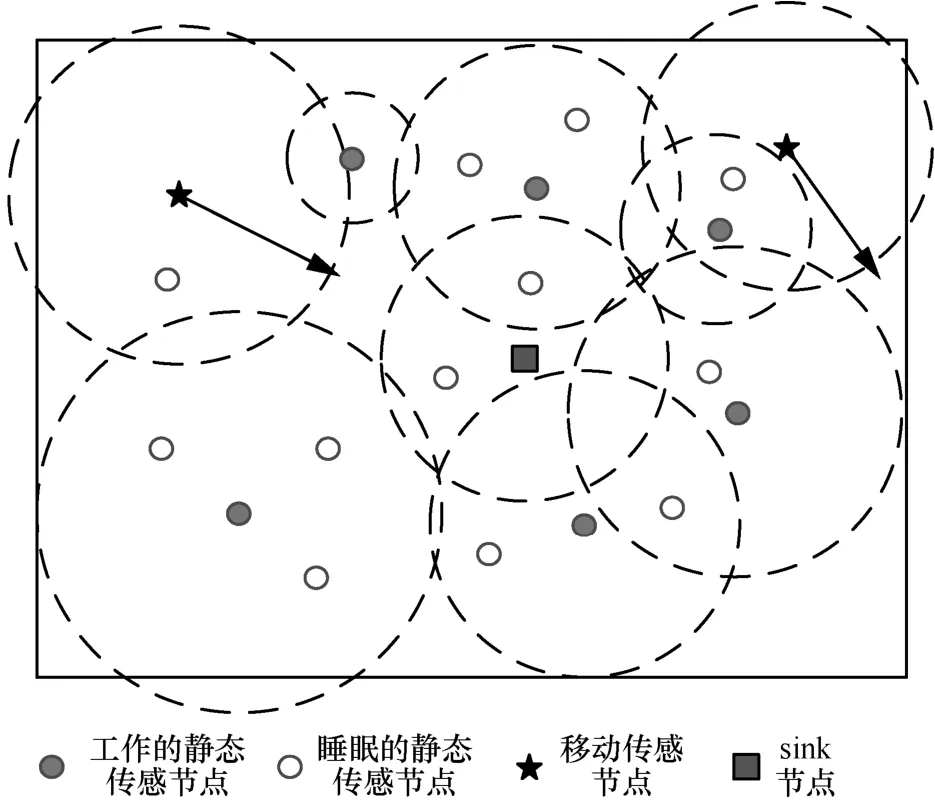
圖1 CSA原理
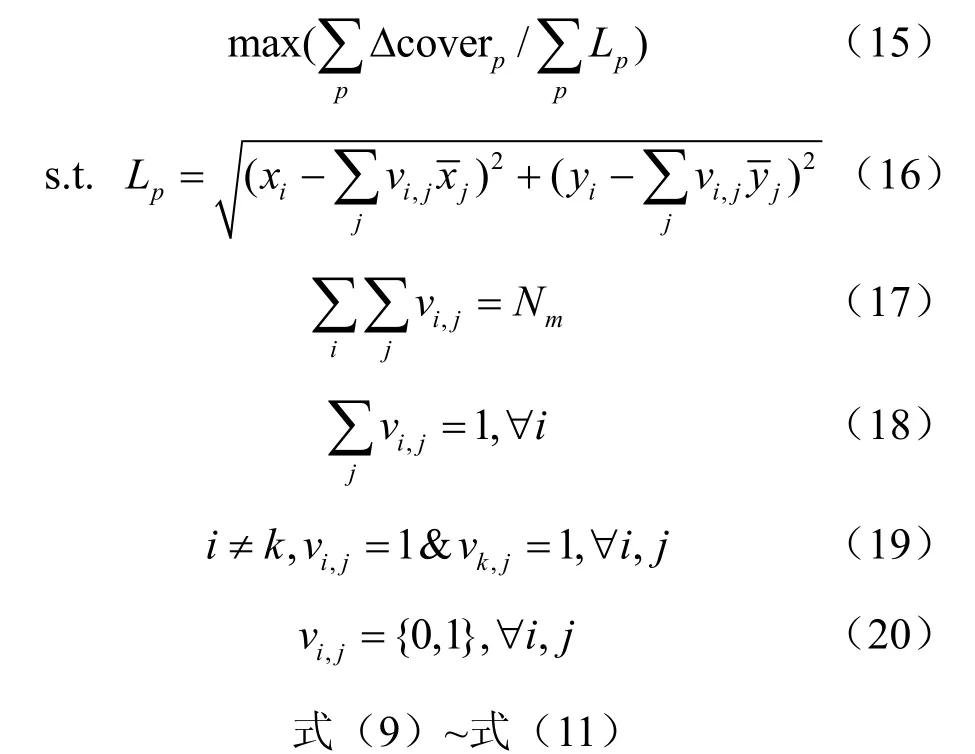
當傳感節點部署后,通過與鄰居傳感節點通信,獲知鄰居傳感節點的位置、感知半徑等信息,如圖2所示。根據自身感知半徑,在自身感知圓弧上確定間隔相同的Nhu個點位置,其中Nhu表示圓弧上計算點個數,選擇感知半徑相交的鄰居傳感節點位置,并計算Nhu個點是否被鄰居傳感節點覆蓋。即:

其中,chu(i,j)表示與自身節點j的圓弧上第i個點是否被鄰居傳感節點覆蓋的標識符。表示覆蓋,否則表示不覆蓋。表示圓弧上第i個點的位置,表示鄰居傳感節點av的位置坐標,表示鄰居傳感節點av的感知半徑,Sj表示與自身節點j的感知半徑相交的鄰居傳感節點集合,表示兩位置的距離。根據Nhu個點的狀態,合并所有標識符為0的相鄰位置,可獲得多個未覆蓋的弧及其兩端點位置。
如果靜態傳感節點存在未覆蓋的弧,其兩端頂點為A和B,坐標分別為和則圖2中C點的坐標滿足以下計算式:

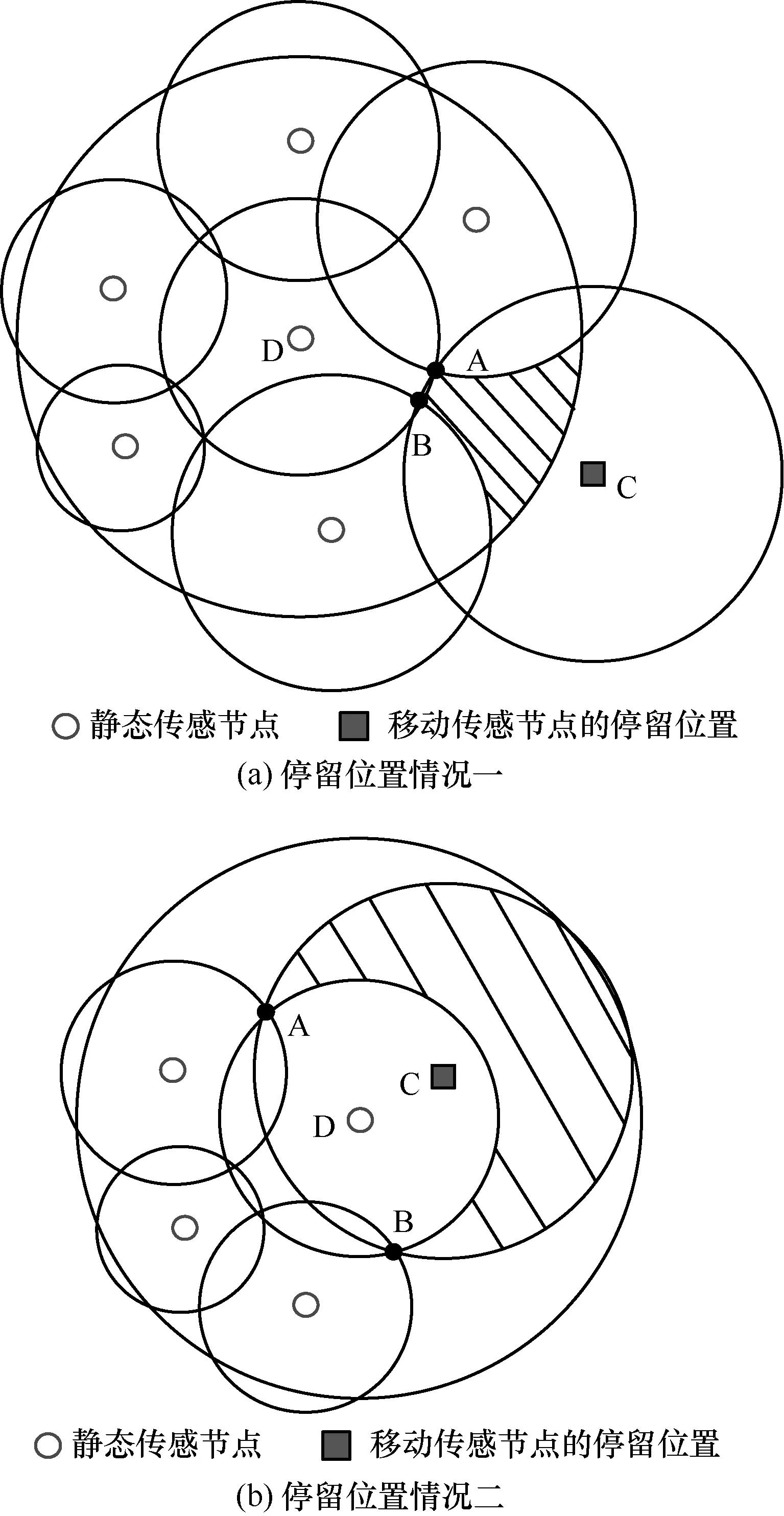
圖2 靜態傳感節點的移動傳感節點停留位置選擇
其中,rC表示圓C的半徑。式(4)減式(5),可得:

將式(6)代入式(4),并令,求解得:
根據式(6)可得和,即C點的兩種可能性和 (根據兩點可選坐標,分別計算到自身圓點D的距離且
當自身節點未覆蓋弧的角度0 ≤θL≤ π ,則選擇作為自身節點期望的移動傳感節點位置,否則選擇作為自身節點期望的移動傳感節點位置。如果存在多個不連續的未覆蓋弧,則分別計算這些弧所對應的移動傳感節點位置,即可估計移動傳感節點的位置。
2.2 覆蓋調度模型建立
當覆蓋盲區不能被靜態傳感節點覆蓋時,此時需要移動傳感節點移動修復該區域。令當前移動傳感節點的數量為Nm,移動傳感節點的初始位置為pm=(xm,ym),新的停留位置則移動傳感節點新的位置區域覆蓋率增量Δc overp為:

其中,Xi表示負責計算停留位置的傳感節點i和其處于工作狀態鄰居傳感節點的位置集合,表示根據Xi中傳感節點位置的區域覆蓋率。為方便計算覆蓋率,如圖 3所示,以傳感節點i的自身位置為中心,將周圍區域分解成多個網格。如果該區域網格中心在處于工作狀態的傳感節點的感知覆蓋區域內,則該網格被覆蓋,即:

其中,cgv(Xi)表示集合Xi下網格gv是否被覆蓋的標識符,則區域覆蓋率的計算式為:

其中,ngrid表示網格的個數。
移動傳感節點從初始位置移動到新位置的路程為:

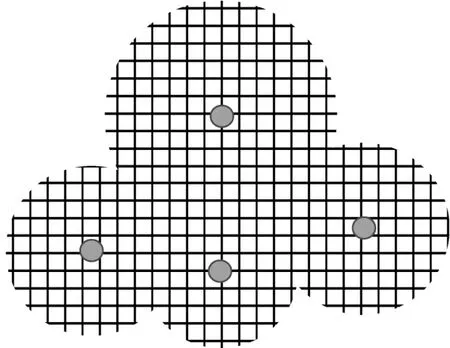
圖3 傳感節點的覆蓋計算方法
需要讓所有移動傳感節點新的位置區域覆蓋率增長最多且移動路程最短,則獲得如下目標函數:
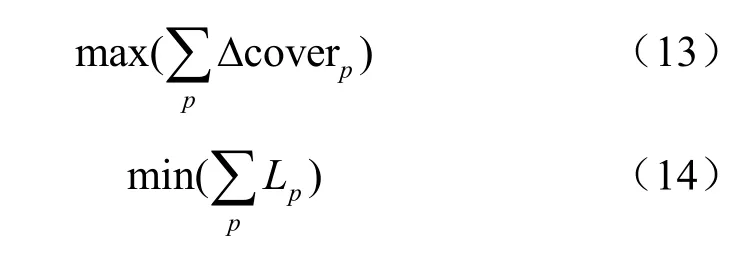
根據上述的多目標問題,建立以下優化模型:
其中,vi,j表示一個移動傳感節點i是否移動到該集合中位置j的標識符。當時,該節點將移動并停留在該位置上,否則不移動。式(16)表示移動傳感節點從當前位置移動到新位置的路程,式(17)表示當前移動傳感節點的數量為Nm,式(18)表示同一個移動傳感節點只能移動到某一個固定位置,式(19)表示不同的移動傳感節點不能移動到同一個位置,則移動傳感節點的覆蓋調度問題轉化成匹配問題。
2.3 算法設計
覆蓋調度模型——式(15)可采用遺傳算法、粒子群算法等人工智能算法求解該優化模型,但是上述算法是集中式算法,需要能收集所有傳感節點的算法處理中心,且計算量較大,因此采用包括靜態傳感節點和移動傳感節點的啟發式方法求解該優化模型,獲得較優方案,具體 CSA設計如下。
設第i類生產設備的第k臺機器在一個工作日內用于生產第j種零件的時間為xikj(k=1,2,…,pi).類似地,對每一臺設備,被分配用于生產所有零件的工作時間總和為1,即有約束條件:
在CSA中,靜態傳感節點、移動傳感節點和sink節點分別執行各自不同的算法。sink節點定時發送盲區計算分組和路由信息分組,并通過多跳傳輸收集所有傳感節點的感知數據。靜態傳感節點完成程序初始化后,監聽不同的分組,并判斷屬于不同的情況,執行不同的程序,是一個事情驅動的算法。如圖4所示,具體實現步驟如下。
步驟 1 網絡啟動后,設置定時時間。定時時間到后發送包含自身位置、感知半徑、剩余能量等狀態信息的節點信息分組。
步驟 2 接收所有鄰居傳感節點的位置、感知半徑、剩余能量等狀態信息,存儲到鄰居傳感節點的狀態信息表中。
步驟3 如果接收sink節點的盲區計算分組,則根據所有鄰居靜態傳感節點的位置,判斷其弧是否全覆蓋,如果其弧未全覆蓋,計算未覆蓋弧中連續子弧的數量NL和每一個子弧的兩個端點位置坐標,根據式(7)、式(8)計算移動傳感節點位置的兩種可能,根據子弧的角度確定每一個子弧所對應的移動傳感節點位置。計算需要移動傳感節點停留的可選位置坐標和位置權重,向未盲區計算的鄰居傳感節點轉發盲區計算分組。
步驟 4 如果接收到鄰居傳感節點的能量失效分組,獲知該鄰居傳感節點的位置、感知半徑等信息。計算需要移動傳感節點停留的位置坐標和位置權重。
步驟 5 如果存在到移動傳感節點的路徑且需要發送停留位置,則將包含有停留位置、權值等信息的移動傳感節點請求分組多跳傳輸給移動傳感節點。
步驟 6 如果接收到移動傳感節點的路由查詢分組,則記錄到該移動傳感節點的路徑。判斷路由查詢分組的跳數。當完成m跳后,則不轉發該分組,否則轉發該分組。
步驟 7 如果接收到移動傳感節點的位置確認分組或位置取消分組,則廣播通知其周圍的其他靜態傳感節點。
步驟 8 如果接收到靜態傳感節點的位置確認分組,則考慮該位置停留移動傳感節點。如果接收到靜態傳感節點的位置取消分組,則考慮該位置沒有停留移動傳感節點,重新判斷其弧是否全覆蓋。如果其弧未全覆蓋,更新移動傳感節點位置和其權值。
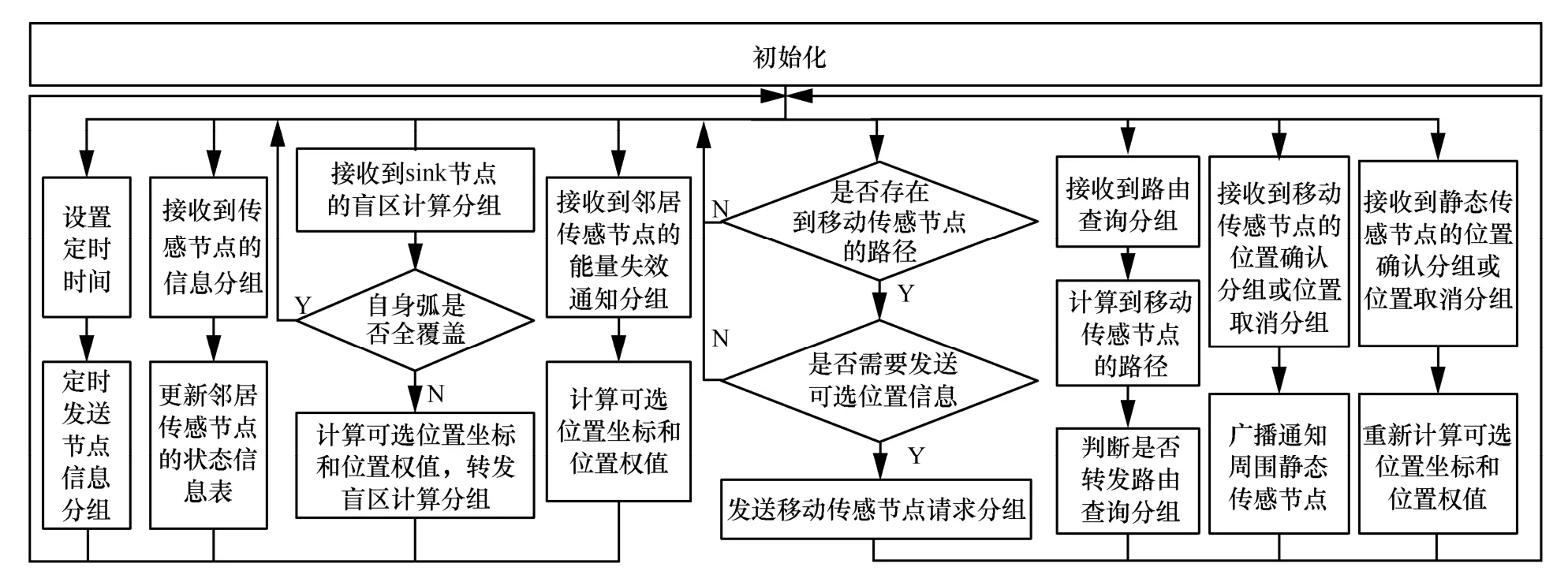
圖4 CSA的靜態傳感節點的工作流程
網絡啟動后,移動傳感節點根據靜態傳感節點的位置信息分組,選擇并移動到目標位置。如圖5所示,具體實現步驟如下。
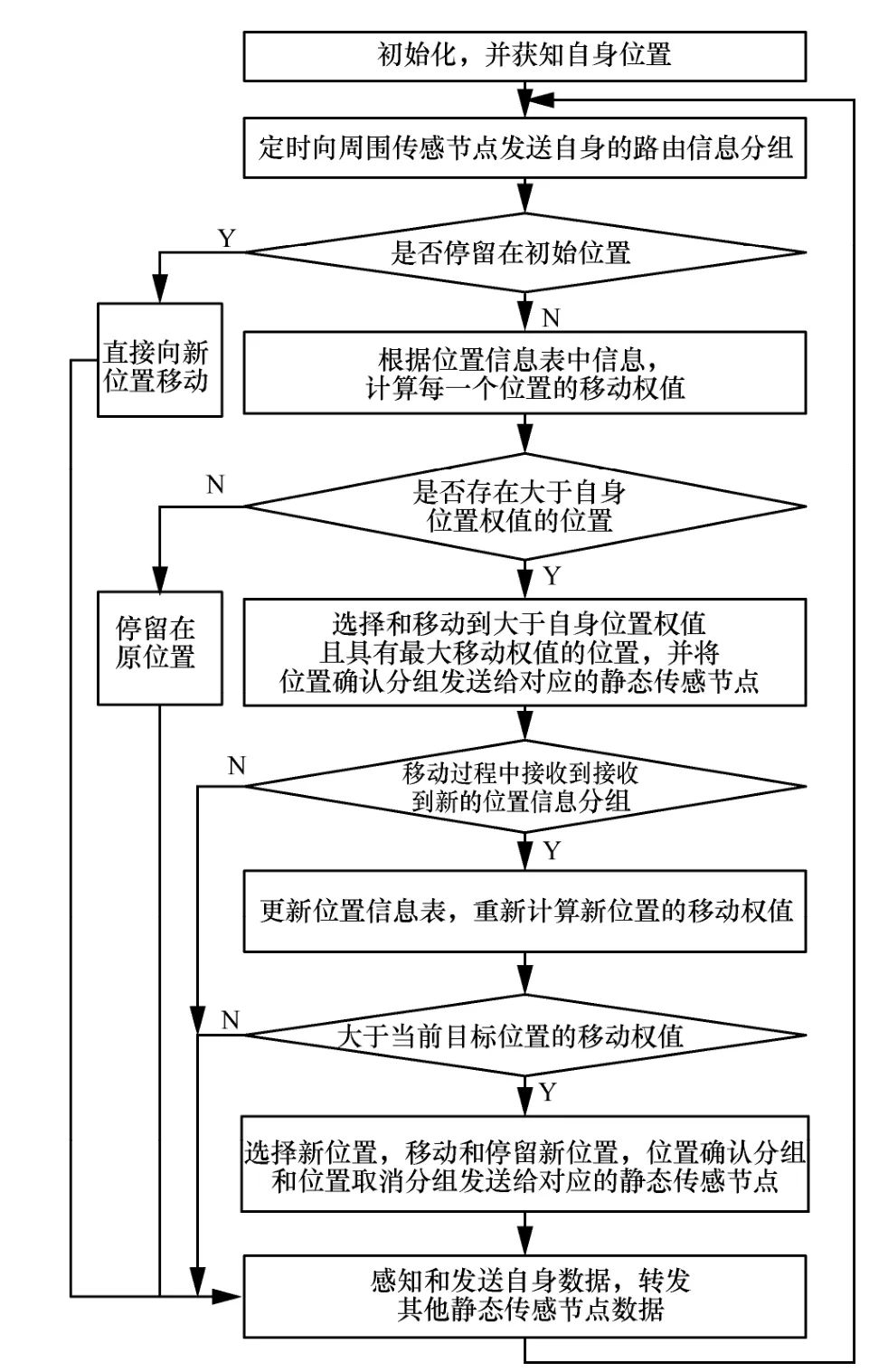
圖5 CSA的移動傳感節點的工作流程
步驟1 初始化,并獲知自身位置。
步驟2 定時向周圍傳感節點發送自身的路由信息分組。
步驟 3 如果接收到傳感節點的停留位置坐標和位置權重,則將該分組信息添加到可選位置信息表中。
步驟4 如果停留在初始位置,則直接向該位置移動,跳到步驟5,否則根據位置信息表中的信息,計算每一個位置的移動權值并比較自身位置的位置權值。如果存在大于自身位置權值且具有最大移動權值的位置,選擇和移動到該位置,并將位置確認分組發送給對應的靜態傳感節點,否則仍停留在原位置。如果在移動過程中接收到新的位置信息分組,則更新位置信息表,重新計算新位置的移動權值其中Li′表示已經移動的距離,表示當前最新位置到可選位置信息表中的距離。如果大于當前目標位置的移動權值,則選擇新位置作為移動目標位置,將位置確認分組和位置取消分組發送給對應的靜態傳感節點。
步驟 5 移動和停留在當前目標位置,感知和發送自身數據,轉發其他靜態傳感節點數據。
如圖4和圖5所示,CSA算法是一個分布式算法,其時間復雜度分析主要是分析靜態傳感節點和移動傳感節點的時間復雜度。靜態傳感節點主要是根據每一個鄰居傳感節點的信息,計算可選位置坐標和位置權重,即其時間復雜度為,其中ni表示傳感節點i的鄰居傳感節點個數。移動傳感節點主要是根據接收到的靜態傳感節點停留位置信息分組,選擇和移動到目標位置,即其時間復雜度為,其中np表示移動傳感節點接收到的期待停留位置個數,因此CSA算法對時間復雜度的要求不高。在消息交互過程中,由于靜態傳感節點的狀態信息和路由查詢、移動傳感節點路由信息等信息可整合到路由算法的消息分組中,且位置確認分組、位置取消分組、能量失效分組等消息分組是根據發生的事件選擇發送,因此CSA的消息開銷不大。
3 算法仿真
3.1 仿真參數選擇和比較算法
在仿真中,只考慮無線傳感網感知數據的無線通信能耗,不考慮信息分組傳輸能耗、數據計算能耗等其他能耗。根據上述算法分析,采用MATLAB R2014a軟件,編寫M語言程序仿真實現不考慮移動傳感節點算法(Mno)、MNode[8]、MGrid[14]和CSA 4種算法,并比較各算法性能參數。其中,MNode算法讓移動傳感節點選擇最近的失效節點位置作為其停留位置。MGrid算法將監控區域劃分成多個大小相同的網格,讓移動傳感節點選擇存在覆蓋盲區的網格中心停留。即在仿真實驗中隨機均勻產生[50 m, 150 m]區間的靜態傳感節點感知半徑,隨機均勻產生監控區域內傳感節點的位置分布,選擇分布式貪婪算法(disturbed greedy algorithm,DGA)[8]調度靜態傳感節點的工作狀態,選擇分布式Bellman_Ford算法[17]作為傳感節點的數據路由算法,考慮移動傳感節點可移動修復覆蓋盲區,并采用以下參數實現算法仿真,輸出網絡生存時間、區域覆蓋率、存活靜態傳感節點個數、平均靜態傳感節點能耗等性能參數值:監測區域的長和寬均為1 000 m,傳感節點的最大通信半徑為200 m,移動傳感節點的感知半徑為 200 m,傳感節點個數為100,一次數據收集周期的傳感節點感知數據量為1 Mbit,初始能量Einital為1 000 J,數據處理能耗參數Eelec為50 nJ/bit,數據發送能耗參數εfs為100 pJ/(bit·m2),圓弧上點個數Nhu為 50。其中定義一個數據收集周期(data collection period,DCP)表示 sink節點收集完監控區域內處于工作狀態的所有傳感節點1 Mbit數據所需要的時間。x%區域覆蓋的網絡生存時間定義為網絡啟動后,傳感節點保持x%以上區域覆蓋的DCP個數。區域覆蓋率定義為處于工作狀態的靜態傳感節點和移動傳感節點覆蓋面積和監控區域面積的比值。存活靜態傳感節點個數定義為網絡啟動到當前時間,處于工作和睡眠狀態的靜態傳感節點個數。平均靜態傳感節點能耗定義為靜態傳感節點的總能耗與靜態傳感節點個數和 DCP個數的比值。
3.2 仿真結果分析
采用第 3.1節的仿真參數和移動傳感節點個數20,分別計算Mno、MNode、MGrid和CSA 4種算法的區域覆蓋率和存活靜態傳感節點個數,獲得圖6和圖7。
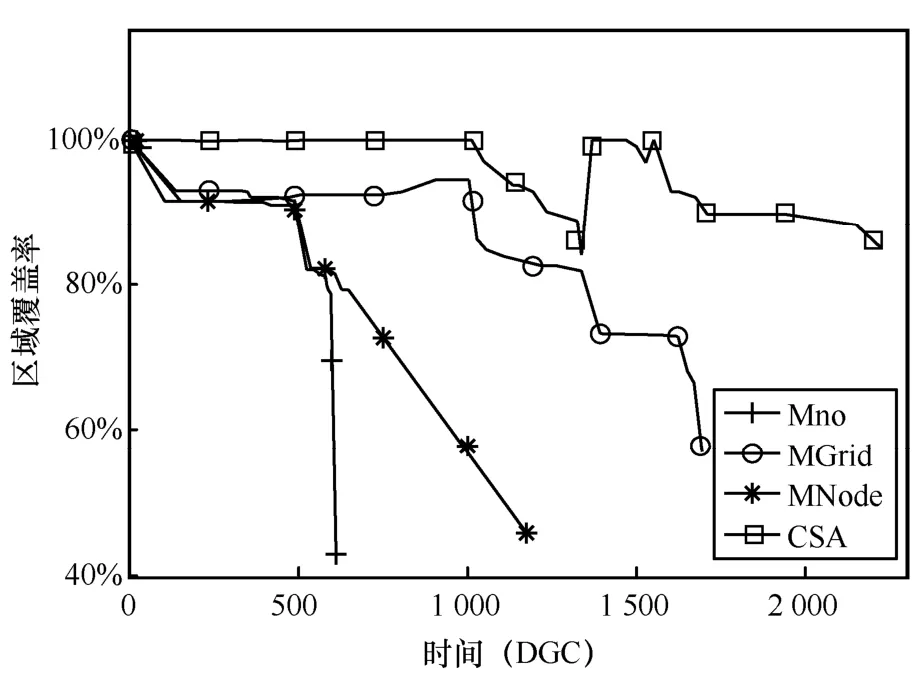
圖6 區域覆蓋率的變化曲線
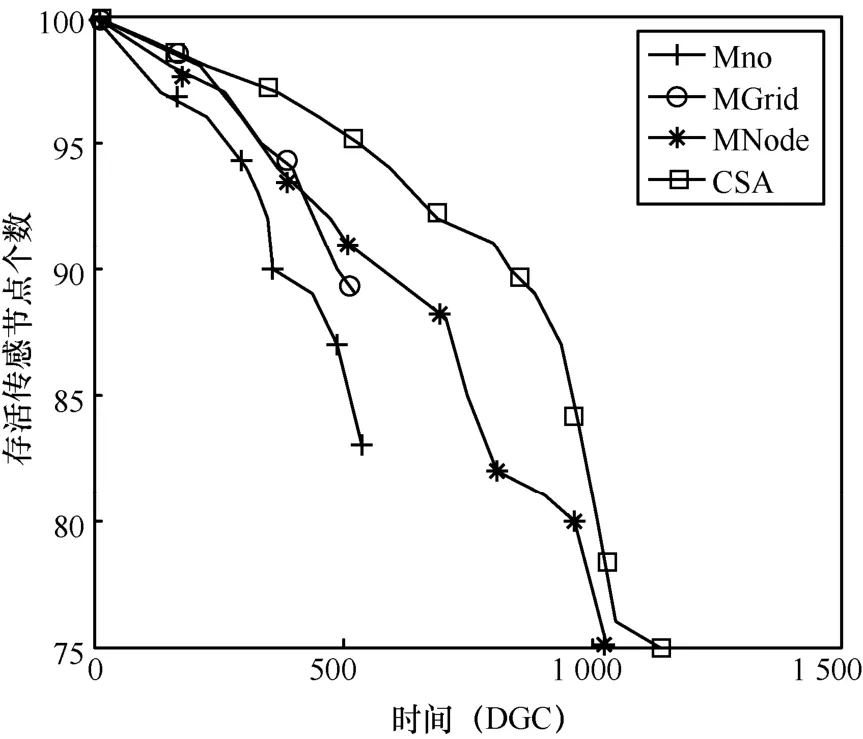
圖7 存活靜態傳感節點個數的變化曲線
CSA保持相同區域覆蓋率的 DCP個數高于Mno、MNode和MGrid算法,如圖6所示。這是因為在移動傳感節點的調度中,CSA讓移動傳感節點停留在失效節點的位置,修復因節點失效引起的覆蓋盲區,讓移動傳感節點停留在靜態傳感節點計算的可選位置,修復因節點位置分布出現的覆蓋盲區,盡可能讓移動傳感節點停留在合適的位置,同時在保證最大化覆蓋的情況下提高網絡生存時間。Mno算法沒有考慮移動傳感節點,沒有移動傳感節點的修復功能,因此相同區域覆蓋率的DCP個數最低。MGrid算法只是選擇網格中心的位置,可選位置有限,MNode算法選擇失效節點的位置,只是考慮覆蓋盲區出現的一個方面。因此,Mno、MNode和MGrid算法的網絡生存時間比CSA算法的網絡生存時間低。而且由于移動傳感節點移動覆蓋的效果較好,當覆蓋率第一次下降時,通過移動修復,其網絡覆蓋率重新達到100%。因此其覆蓋率曲線是上下起伏。
隨著 DCP個數的增加,靜態傳感節點因能量耗盡而死亡,因此各個算法的存活靜態傳感節點個數隨之下降,如圖7所示。但是除了一小段時間,MNode的存活靜態傳感節點個數高于其他3個算法,在大多數時間內,CSA算法因移動傳感節點停留在適合的位置,調度靜態傳感節點工作,其平均節點能耗較少,存活的傳感節點個數大于Mno、MNode、MGrid算法。
最后,選擇移動傳感節點個數5、10、15、20、25、30,隨機產生10個均勻分布的拓撲結構。在仿真過程中,由于靜態傳感節點隨機分布,靜態傳感節點的初始位置沒有覆蓋整個監控區域,Mno、MNode、MGrid算法只考慮到局部信息,較難覆蓋整個監控區域。雖然CSA能修復傳感節點分布的覆蓋盲區,但是很難與上述3個算法比較。因此計算Mno、MNode、MGrid、CSA算法的 90%區域覆蓋的網絡生存時間和平均節點能耗,取其平均值作為仿真結果值。
保持90%以上的區域覆蓋下CSA的網絡生存時間比Mno、MNode和MGrid算法的網絡生存時間長,如圖8所示。Mno算法沒有考慮移動傳感節點。在MNode算法中,移動傳感節點選擇距離最近的能量失效節點移動。在MGrid算法中,移動傳感節點選擇距離最近且具有覆蓋盲區的網格中心位置移動。這3個算法只是考慮覆蓋的某一個方面,而CSA同時考慮能量失效節點和傳感節點分布所引起的覆蓋盲區,讓移動傳感節點選擇合適的停留位置停留,從而其網絡生存時間略高于Mno、MNode和MGrid算法。
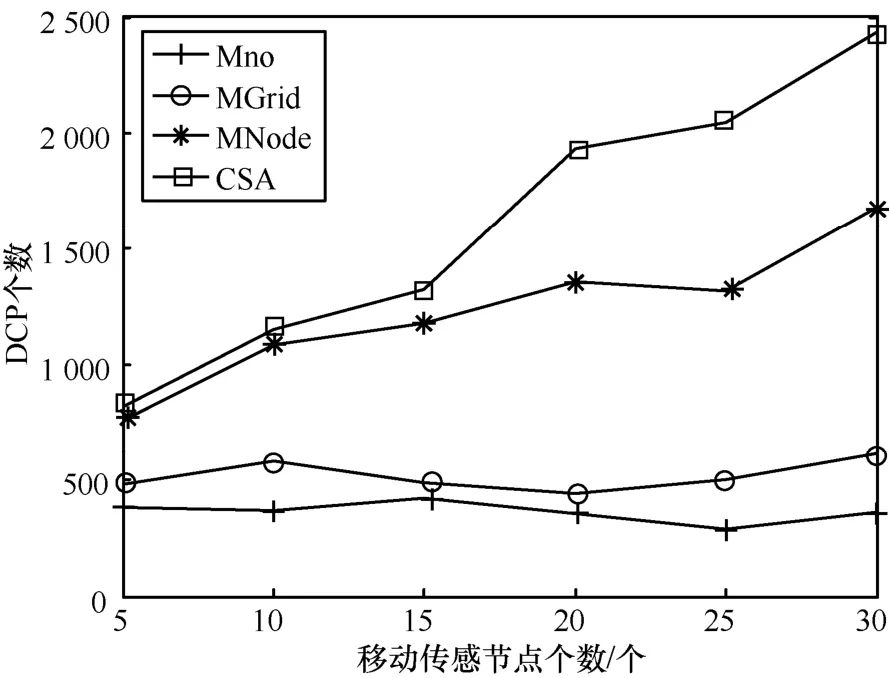
圖8 90%區域覆蓋的網絡生存時間比較

圖9 90%區域覆蓋的平均靜態傳感節點能耗比較
如圖9所示,Mno算法只考慮靜態傳感節點工作,其平均靜態傳感節點能耗較高,MGrid算法的移動傳感節點停留位置不夠理想,網絡生存時間相對較短,其平均靜態傳感節點能耗較高。MNode和 CSA算法的平均靜態傳感節點能耗較低。當移動傳感節點個數為20、25和30時,網絡中移動傳感節點數量較多,CSA充分利用移動傳感節點修復兩種覆蓋盲區,網絡生存時間較高,其平均靜態傳感節點能耗小于MNode算法。因此90%區域覆蓋下,CSA的平均靜態傳感節點能耗小于Mno、MNode和MGrid算法的平均靜態傳感節點能耗。
4 結束語
本文提出了一種優化網絡生存時間的移動傳感節點覆蓋調度算法(CSA)。首先,提出算法假設。提出移動傳感節點覆蓋調度的基本原理,具體包括停留位置的估計、覆蓋調度模型建立和啟發式求解方法。其次,提出CSA的實現,包括sink節點、移動傳感節點和靜態傳感節點的實現步驟。最后給出算法的仿真參數,采用分布式Bellman_Ford算法實現數據路由,采用DGA算法實現靜態傳感節點的覆蓋調度,仿真比較Mno、MNode、MGrid算法和CSA的性能。
總之,相比 Mno、MNode和 MGrid算法,CSA提高了區域覆蓋率和靜態傳感節點存活個數。不管移動傳感節點個數如何變化,在保持相同的區域覆蓋率下,CSA提高了網絡生存時間和降低了平均靜態傳感節點能耗。但是CSA只是選擇啟發式算法求解覆蓋調度模型,其移動傳感節點的位置選擇只是當前移動方案的較優解,因此下一個階段目標是采用分布式最優化方法求解覆蓋調度模型,獲得移動傳感節點的停留位置選擇最優方案。
參考文獻:
[1]卓琨, 張衡陽, 鄭博, 等.無人機自組網研究進展綜述[J].電信科學, 2015, 31(4): 134-144.ZHUO K, ZHANG H Y, ZHENG B, et al.Progress of UAV Ad Hoc network: a survey[J].Telecommunications Science, 2015,31(4): 134-144.
[2]魏穎琪, 林瑋平, 李穎.物聯網智能終端技術研究[J].電信科學, 2015, 31(8): 146-152.WEI Y Q, LIN W P, LI Y.Study on key technologies of intelligent IoT device[J].Telecommunications Science, 2015, 31(8):146-152
[3]肖清旺, 王錦華, 朱易翔.物聯網智能終端設備識別方法[J].電信科學, 2017, 33(2): 3-8.XIAO Q W, WANG J H, ZHU Y X.Intelligent terminal device identification method of internet of things[J].Telecommunications Science, 2017, 33(2): 3-8.
[4]CASTILLO I D, TOBAJAS F, ESPER CHAIN R, et al.Hardware platform for wide-area vehicular sensor networks with mobile nodes[J].Vehicular Communications, 2016, 3(1): 21-30.
[5]馮劍, 王平陽, 王琳, 等.基于能量獲取的無線通信系統研究[J].電信科學, 2015, 31(2): 124-131.FENG J, WANG P Y, WANG L, et al.Research on energy harvesting communication system[J].Telecommunications Science, 2015, 31(2): 124-131.
[6]SINGH A, ROSSI A.A genetic algorithm based exact approach for lifetime maximization of directional sensor networks[J].Ad Hoc Networks, 2013, 11(3): 1006-1021.
[7]IDREES A K, DESCHINKEL K, SALOMON M, et al.Distributed lifetime coverage optimization protocol in wireless sensor networks[J].The Journal of Supercomputing, 2015, 71(12):4578-4593.
[8]AHMED M K, WALID O.Mobility-assisted minimum connected cover in a wireless sensor network[J].Journal of Parallel and Distributed Computing, 2012, 72(7): 827-837.
[9]BARA A A, ENAN A K, SUAT O, et al.A multi-objective disjoint set covers for reliable lifetime maximization of wireless sensor networks[J].Wireless Personal Communications, 2015,81(2): 819-838.
[10]李明.基于差分算法的異構無線傳感器網絡多重覆蓋節點調度方案[J].傳感技術學報, 2012, 25(6): 826-830.LI M.A weighted multiple coverage node scheduling scheme based on differential evolution algorithm for heterogeneous sensor networks[J].Chinese Journal of Sensors and Actuators,2012, 25(6): 826-830.
[11]杜曉玉, 孫力娟, 郭劍, 等.異構無線傳感器網絡覆蓋優化算法[J].電子與信息學報, 2014, 36(3): 696-702.DU X Y, SUN L J, GUO J, et al.Coverage optimization algorithm for heterogeneous WSN[J].Journal of Electronics & Information Technology, 2014, 36(3): 696-702.
[12]KHEDR A M, OSAMY W.Minimum connected cover of a query region in heterogeneous wireless sensor networks[J].Information Sciences, 2013, 223(2): 153-163.
[13]孫力娟, 魏靜, 郭劍, 等.面向異構無線傳感器網絡的節點調度算法[J].電子學報, 2014, 42(10): 1907-1912.SUN L J, WEI J, GUO J, et al.Node scheduling algorithm for heterogeneous wireless sensor networks[J].Acta Electronica Sinica, 2014, 42(10): 1907-1912.
[14]NUDURUPATIA D P, SINGHA R K.Enhancing coverage ratio using mobility in heterogeneous wireless sensor network[C]//International Conference on Computational Intelligence: Modeling Techniques and Applications (CIMTA), Sept 27, 2013, Kalyani, India.Piscataway: IEEE Press, 2013:538-545.
[15]李明, 石為人.虛擬力導向差分算法的異構移動傳感網絡覆蓋策略[J].儀器儀表學報, 2011, 32(5): 1143-1150.LI M, SHI W R.Virtual force-directed differential evolution algorithm based coverage-enhancing algorithm for heterogeneous mobile sensor networks[J].Chinese Journal of Scientific Instrument, 2011, 32(5): 1143-1150.
[16]劉軍, 程良倫, 王建華, 等.一種混合異構傳感網的覆蓋洞修補算法[J].控制與決策, 2015, 30(11): 2080-2084.LIU J, CHENG L L, WANG J H, et al.A coverage hole repair algorithm for hybrid heterogeneous sensor networks[J].Control and Decision, 2015, 30(11): 2080-2084.
[17]陳友榮, 王章權, 程菊花, 等.基于最短路徑樹的優化生存時間路由算法[J].傳感技術學報, 2012, 25(3): 406-412.CHEN Y R, WANG Z Q, CHENG J H, et al.Lifetime optimized routing algorithm based on shortest path tree[J].Chinese Journal of Sensors and Actuators, 2012, 25(3): 406-412.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15