
基于多信息融合的疲勞駕駛預(yù)警系統(tǒng)的研究
2018-05-31 02:52:56趙旭陽(yáng)
時(shí)代汽車(chē) 2018年4期
關(guān)鍵詞:駕駛員實(shí)驗(yàn)
趙旭陽(yáng)
吉林大學(xué)汽車(chē)工程學(xué)院 吉林省長(zhǎng)春市 130022
1 引言
隨著社會(huì)和經(jīng)濟(jì)的迅猛發(fā)展,全球的汽車(chē)保有量也隨之急劇增長(zhǎng)。但交通事故的數(shù)量也隨之增長(zhǎng)。因此,交通安全問(wèn)題成為了當(dāng)今全世界都必須要面對(duì)的問(wèn)題。根據(jù)大量統(tǒng)計(jì)數(shù)據(jù)顯示,由疲勞駕駛引起的交通事故數(shù)量占總數(shù)量的49%,是引發(fā)交通事故所有原因的首位。因此,研究疲勞駕駛預(yù)警系統(tǒng)對(duì)于駕駛安全問(wèn)題的改善有重大意義。
人們研究疲勞駕駛監(jiān)測(cè)的歷史很長(zhǎng),但如何定義疲勞依舊是較困難的問(wèn)題。原因就是疲勞的定義不能被實(shí)驗(yàn)數(shù)據(jù)精確地量化。在本文中,模糊C-均值聚類(lèi)被用來(lái)分析不可精確測(cè)量的特征量,KNN分類(lèi)器被用來(lái)建立特征參數(shù)值與疲勞程度間的關(guān)系。
2 方法
2.1 數(shù)據(jù)采集模塊的建立
在本文中,E6B2-CWZ3E光電編碼器被選用來(lái)收集方向盤(pán)角度的數(shù)據(jù);而光脈搏傳感器被用來(lái)收集脈搏幅度的數(shù)據(jù),進(jìn)而可得到便于隨后數(shù)據(jù)分析過(guò)程中處理與分析的數(shù)據(jù);在收集方向盤(pán)握力的數(shù)據(jù)時(shí),我們運(yùn)用RFP02型壓力傳感器收集,傳感器可以測(cè)量方向盤(pán)上各個(gè)部分的壓力值,系統(tǒng)則可經(jīng)計(jì)算得出各個(gè)非零值的平均值。
2.2 實(shí)驗(yàn)數(shù)據(jù)采集與處理模塊的建立
為簡(jiǎn)化實(shí)驗(yàn)程序和減少數(shù)據(jù)處理的難度,實(shí)驗(yàn)道路的路況被限定為平直路面。實(shí)驗(yàn)數(shù)據(jù)被分為65組。其中,第1-40組是在駕駛員清醒狀況下測(cè)得的,第41-65組是在駕駛員疲勞狀況下測(cè)得的。
駕駛員需不斷地調(diào)整方向盤(pán)的角度以保證車(chē)輛以正常路徑行駛。因此,方向盤(pán)的轉(zhuǎn)動(dòng)角度是駕駛員操縱車(chē)輛的重要特征指標(biāo)。不像在駕駛員清醒狀況下所表現(xiàn)的那樣,在駕駛員疲勞狀況下,方向盤(pán)轉(zhuǎn)角信號(hào)會(huì)表現(xiàn)出兩項(xiàng)特征:其一是方向盤(pán)調(diào)整頻率明顯下降,其二則是方向盤(pán)的調(diào)整幅度變大在方向盤(pán)轉(zhuǎn)角的特征參數(shù)中,以下六個(gè)參數(shù)[1]被證明在辨別駕駛員疲勞狀況方面有更好的辨別力:
方向盤(pán)轉(zhuǎn)角絕對(duì)平均值(SAMEAN)是方向盤(pán)轉(zhuǎn)角數(shù)據(jù)絕對(duì)值化后取平均得到(公式略)。
方向盤(pán)轉(zhuǎn)角標(biāo)準(zhǔn)差(SASTD)是方向盤(pán)轉(zhuǎn)角數(shù)據(jù)取標(biāo)準(zhǔn)差計(jì)算得到的(公式略)。
在數(shù)據(jù)的處理中,方向盤(pán)的轉(zhuǎn)角的絕對(duì)數(shù)值如果超過(guò)絕對(duì)值的最大值的3/4被認(rèn)為是角度過(guò)大,若小于絕對(duì)值的最大值的1/4被認(rèn)為是角度過(guò)小。Q1MEAN代表了一定時(shí)間內(nèi)方向盤(pán)轉(zhuǎn)角絕對(duì)值小于絕對(duì)值的最大值的1/4的樣本數(shù)量所占總樣本數(shù)的比例,Q3MEAN代表了一定時(shí)間內(nèi)方向盤(pán)轉(zhuǎn)角絕對(duì)值大于絕對(duì)值的最大值的3/4的樣本數(shù)量所占總樣本數(shù)的比例,Q1MEAN和Q3MEAN統(tǒng)稱(chēng)為方向盤(pán)角度的四分位值。
方向盤(pán)角速度的絕對(duì)值平均值(SAVMEAN)是代表了方向盤(pán)轉(zhuǎn)動(dòng)速度的衡量指標(biāo),是由方向盤(pán)轉(zhuǎn)角速度數(shù)據(jù)絕對(duì)值化后取平均得到(公式略)。
方向盤(pán)角速度的標(biāo)準(zhǔn)差(SAVSTD)由方向盤(pán)轉(zhuǎn)角角速度的標(biāo)準(zhǔn)差計(jì)算得到,其值越大,方向盤(pán)的轉(zhuǎn)動(dòng)頻率越高(公式略)。
在處理脈搏數(shù)據(jù)時(shí),我們預(yù)先對(duì)其信號(hào)進(jìn)行了降噪處理[2],降噪結(jié)果如下圖所示:
在生理科學(xué)領(lǐng)域,脈搏信號(hào)被廣泛地用來(lái)評(píng)價(jià)測(cè)試對(duì)象的生理狀況[3],除了脈搏頻率以外,在其余特征參數(shù)中,以下指標(biāo)被驗(yàn)證在判斷駕駛員疲勞程度時(shí)具有良好地評(píng)價(jià)能力[4]:
脈搏信號(hào)的均方根(由數(shù)據(jù)值平方加和取平均得到)
2.3 基于模糊C均值聚類(lèi)的數(shù)據(jù)庫(kù)搭建
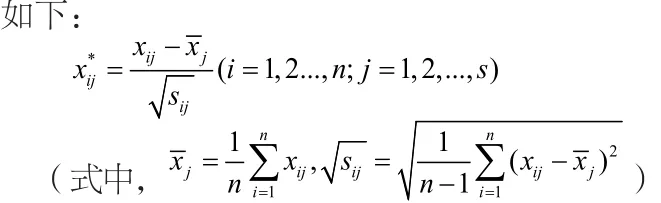
為了分析離散的數(shù)據(jù)以及為后續(xù)的KNN分類(lèi)器建立做準(zhǔn)備,我們引入歐式距離和模糊理論。為了消除各個(gè)特征參數(shù)量綱的影響,我們先對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理,標(biāo)準(zhǔn)化公式

2.4 KNN分類(lèi)器的建立
KNN分類(lèi)器是一種通用的數(shù)據(jù)分類(lèi)算法,由數(shù)學(xué)家Cover和Hart于1968年提出。首先,應(yīng)算出樣本x與每個(gè)已知的預(yù)測(cè)聚類(lèi)中心的距離。而后我們將得到的距離進(jìn)行分類(lèi)。最后,K預(yù)測(cè)樣本可從距離最近的已知樣本中得到。KNN算法的原則是:在K預(yù)測(cè)樣本中,若某類(lèi)數(shù)據(jù)占最大比例,那么x則可被分為此類(lèi)。KNN算法的具體步驟如下:
(1)利用已有的數(shù)據(jù)構(gòu)建訓(xùn)練集并得到供預(yù)測(cè)的集合。訓(xùn)練集為P集合,而預(yù)測(cè)集為Q集合,P集合可由以下公式得到:i個(gè)維度的矢量矩陣,ci代表了第i個(gè)預(yù)測(cè)集合的類(lèi)。

圖1
(2)根據(jù)K的初始值,K被預(yù)先分為10類(lèi),K的具體數(shù)值會(huì)隨著實(shí)驗(yàn)結(jié)果調(diào)整。
(3)本文中運(yùn)用歐氏距離計(jì)算樣本與訓(xùn)練集的距離,其計(jì)算公式為:
(4)找出與K與所有數(shù)據(jù)庫(kù)樣本中聚類(lèi)中心的距離值,并排序。
(5)找出樣本x的主的主類(lèi),計(jì)算距離K最近的幾個(gè)聚類(lèi)中心,列為:他們對(duì)應(yīng)的類(lèi)為,則其最多的標(biāo)記類(lèi)即為最終的預(yù)測(cè)結(jié)果(疲勞與否)。
3 實(shí)驗(yàn)結(jié)果
因?yàn)橄到y(tǒng)在KNN分類(lèi)器建立時(shí)可將正確的測(cè)試結(jié)果作為數(shù)據(jù)庫(kù)的樣本,這樣便可增加數(shù)據(jù)庫(kù)的樣本量,提高整個(gè)系統(tǒng)的預(yù)測(cè)準(zhǔn)確率。本文中,疲勞駕駛預(yù)警系統(tǒng)用65組數(shù)據(jù)進(jìn)行驗(yàn)證準(zhǔn)確性的實(shí)驗(yàn),可發(fā)現(xiàn),隨著樣本數(shù)從15變?yōu)?5,預(yù)測(cè)的準(zhǔn)確率也相應(yīng)提升。
4 結(jié)語(yǔ)
在本文中,通過(guò)對(duì)由方向盤(pán)轉(zhuǎn)角數(shù)據(jù),脈搏數(shù)據(jù)以及握力的處理,可得到10項(xiàng)特征參數(shù)值。在利用C均值聚類(lèi)分析實(shí)驗(yàn)數(shù)據(jù)之后,KNN分類(lèi)器被用來(lái)建立特征參數(shù)與疲勞程度的關(guān)系。通過(guò)比較驗(yàn)證實(shí)驗(yàn)的結(jié)果,本系統(tǒng)被證明擁有良好的準(zhǔn)確性和魯棒性,并且隨著樣本數(shù)的增加與分析的迭代,系統(tǒng)的預(yù)測(cè)準(zhǔn)確性也明顯提高。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
汽車(chē)實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車(chē)實(shí)用技術(shù)(2022年7期)2022-04-20 11:44:42
汽車(chē)實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
汽車(chē)電器(2018年1期)2018-06-05 01:22:54
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
公民與法治(2016年4期)2016-05-17 04:09:26
