基于D-H矩陣的挖斗可偏轉挖掘機工作裝置運動學建模與分析
2018-06-07 01:40:08張晴晴龔智強
綏化學院學報 2018年6期
張晴晴 謝 傲 龔智強
(巢湖學院機械與電子工程學院 安徽巢湖 238000)
液壓挖掘機是目前工程上進行土方挖掘工作最主要的機械之一,在國內外眾多工程領域均有廣泛應用[1]。傳統的液壓挖掘機主要由動臂、斗桿、挖斗,及其相應的驅動油缸組成,當基座固定時,工作裝置只能在同一平面內作業,若完成前后左右“十”字交叉軌跡的特殊挖掘任務,需要較大工作空間。隨著基礎建設地域和領域的不斷拓寬,適應狹小空間并能完成多方位挖掘任務的挖掘機工作裝置顯得尤為重要。通過對挖掘機駕駛人員的實際調查得知,在基座固定不轉動的情況下挖斗可實現前后和左右多方位挖掘作業的工作裝置,將有利于在較小的工作空間內完成復雜的挖掘工作。目前河北工業大學的張換高等人[1]提出了一種挖掘機工作裝置旋轉機構可實現上述動作,該機構的動臂前端設有旋轉臂,旋轉臂可相對動臂左右旋轉,從而帶動斗桿、挖斗,相對于動臂左右旋轉,可在一定程度上提高挖掘機工作裝置的靈活性。但是該機構在工作時,挖斗、斗桿、旋轉臂均要發生相對轉動,導致其工作范圍仍較大,靈活性有限,且旋轉臂和動臂之間的連接強度得不到保證。
本文作者針對上述問題,設計了一種新型挖斗可偏轉挖掘機工作裝置及其關鍵零部件偏轉油缸[2-3]。為了研究該裝置的結構特性,本文將通過創建連桿坐標系,建立D-H矩陣方程,以及數值仿真分析等方式獲取其挖斗齒尖在Z軸的最大挖掘位置和在X-Y平面內的工作區域,作為判斷依據進行研究。
一、挖斗可偏轉挖掘機工作裝置的結構
為了使挖斗在機身和動臂保持不動的情況下轉動,需要給挖斗提供一個轉動的動力源,因此本文在斗桿的上端設置了一個偏轉油缸,具體結構如圖1所示。偏轉油缸的底端與斗桿相連,偏轉油缸的側壁與動臂相連。工作時,偏轉油缸作為斗桿的一部分參與挖掘工作,又可為挖斗提供回轉動力,使挖斗實現“十”字挖掘工作[3]。
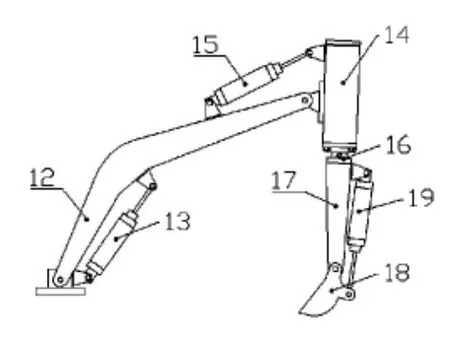
圖1 挖斗可偏轉挖掘機工作裝置結構示意圖
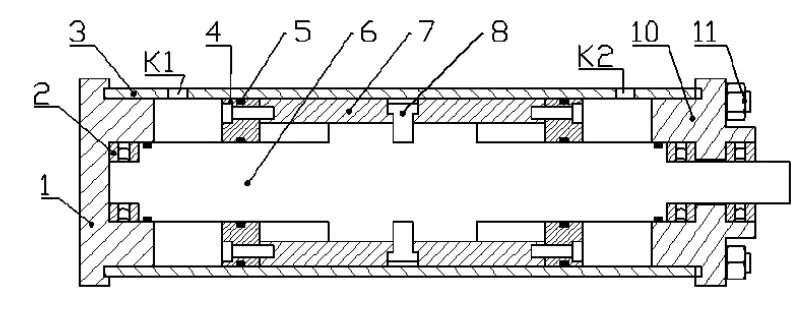
圖2 偏轉油缸主視圖
二、挖斗可偏轉挖掘機工作裝置的運動學建模
(一)D-H矩陣法簡介[4]。早在 1955年,Denavit和Hartenberg在“ASMEJournalofAppliedMechanics”論文中提出了Denavit-Hartenberg(D-H)模型,并用其對機器人連桿和關節進行建模。該模型只需給每個關節指定一個參考坐標系,然后確定從一個坐標系到下一個坐標系所進行的變換,最終實現任意兩個相鄰坐標系之間的變換(如圖3所示),從而確定機器人的總變換矩陣。本文所設計的挖斗可偏轉挖掘機工作裝置可看作是連桿和關節的組合,適合于D-H模型。
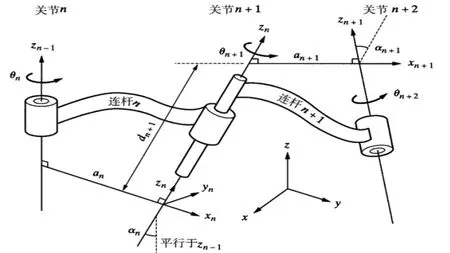
圖3 通用關節-連桿組合的D-H模型示意圖
其中:ai-1—關節扭轉角,表示從Zi-1到Zi繞Xi-1的旋轉角度;
ai-1—連桿長度,表示從Zi-1到Zi沿Xi-1的測量距離;(為便于字符區分,本文中將連桿長度記為:li-1)
di—關節偏移量,表示Xi-1從Xi到沿Zi的測量距離;
θ—旋轉角,表示從Xi-1到Xi繞Zi的旋轉角度。
(二)基于D-H矩陣法建立挖掘機工作裝置的運動學模型。基于D-H矩陣法建立挖斗可偏轉挖掘機工作裝置的運動學建模,要指定工作裝置中每個關節的參考坐標系,其所遵從的法則是:所有關節用z軸表示,其中旋轉關節按右手規則指定方向,滑動關節沿直線運動指定方向;x軸定義在相鄰兩個關節公垂線方向上,若沒有公垂線,可將垂直于兩相鄰關節軸線構成的直線定義為x軸;在參考坐標系中y軸的方向始終垂直于x軸和z軸。挖斗可偏轉挖掘機工作裝置的結構與坐標空間示意圖如圖4所示:
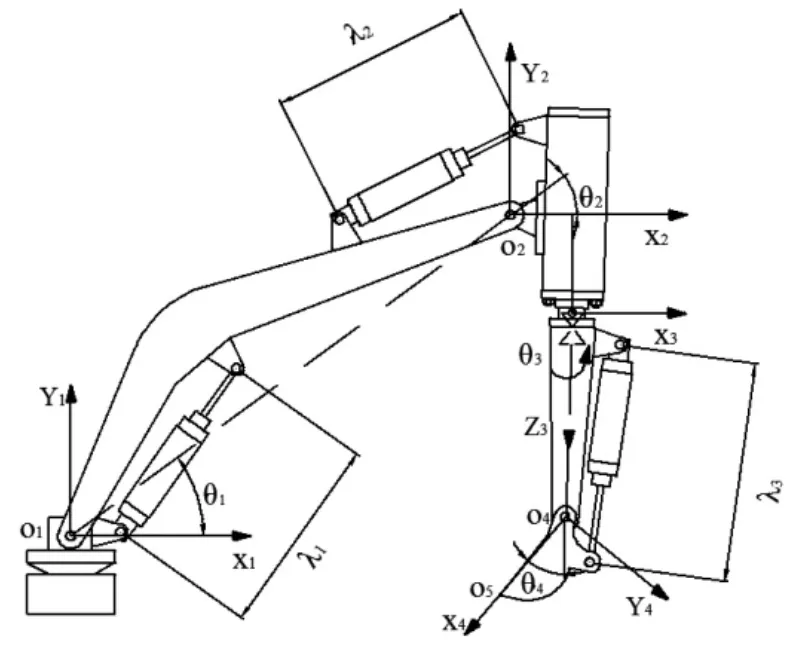
圖4 挖斗可偏轉挖掘機工作裝置的結構與坐標空間示意圖
為了便于建模觀察,將圖4所示的挖斗可偏轉挖掘機工作裝置的結構與坐標空間示意圖簡化成圖5所示的連桿坐標系簡圖。
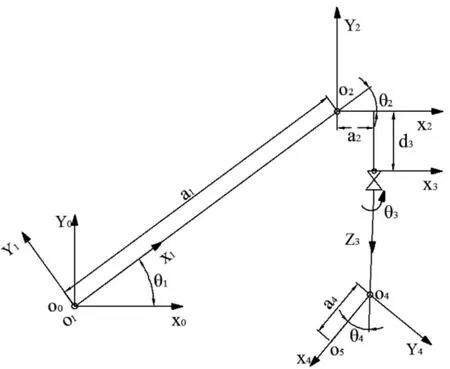
圖5 挖斗可偏轉挖掘機工作裝置連桿坐標系簡圖
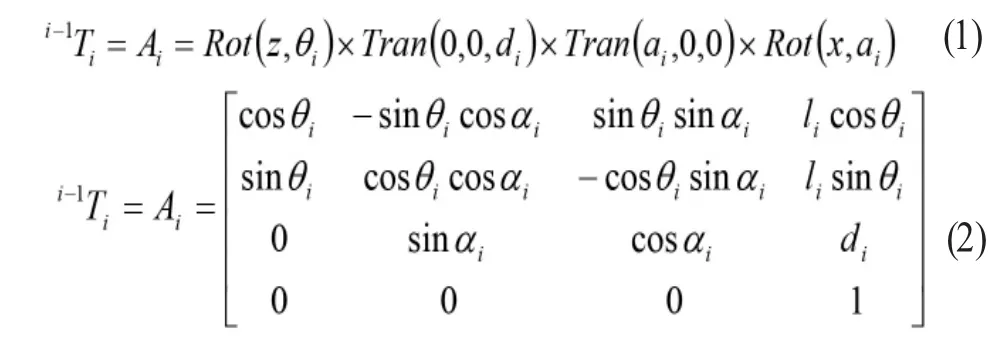
由圖5可知,本文設計的挖斗可偏轉挖掘機工作裝置的關節姿態可用基坐標系O0-X0Y0Z0和其他轉換坐標系O1-X1Y1Z1、O2-X2Y2Z2、O3-X3Y3Z3、O4-X4Y4Z4表示,工作裝置末端的挖斗齒尖所處的空間姿態可以用O5-X5Y5Z5坐標表示。為了計算工作裝置末端的挖斗齒尖所處的空間姿態,需要將其所處坐標轉O5-X5Y5Z5換到基坐標O0-X0Y0Z0下表示。連桿坐標系OI-XIYIZI相對于Oi-1-Xi-1Yi-1Zi-1的坐標轉換i-1Ti如公式(1)、(2)所示[4-5]:
從圖5中提取挖斗可偏轉挖掘機工作裝置機構中各關節和連桿參數,如表1所示。
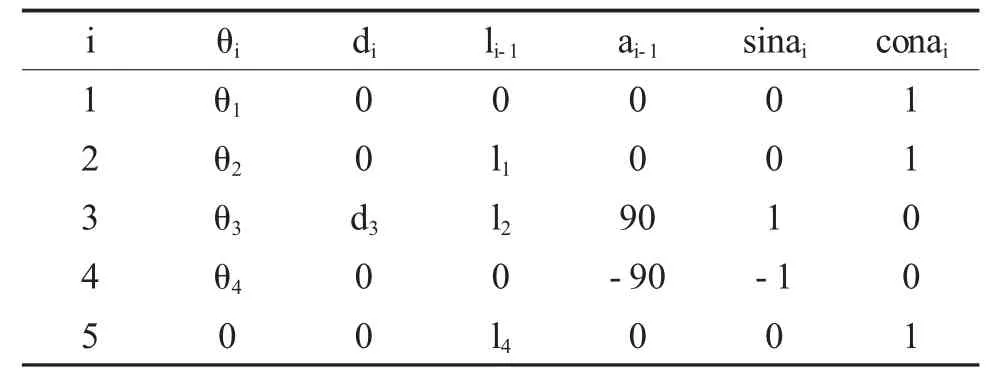
表1 D-H參數表
將表1所示得參數代入i-1Ti矩陣,可得到O0TO1、O1TO2、O2TO3、O3TO4和O4TO5,挖斗齒尖所處的空間姿態的坐標轉換O0TO5如公式(3)所示:
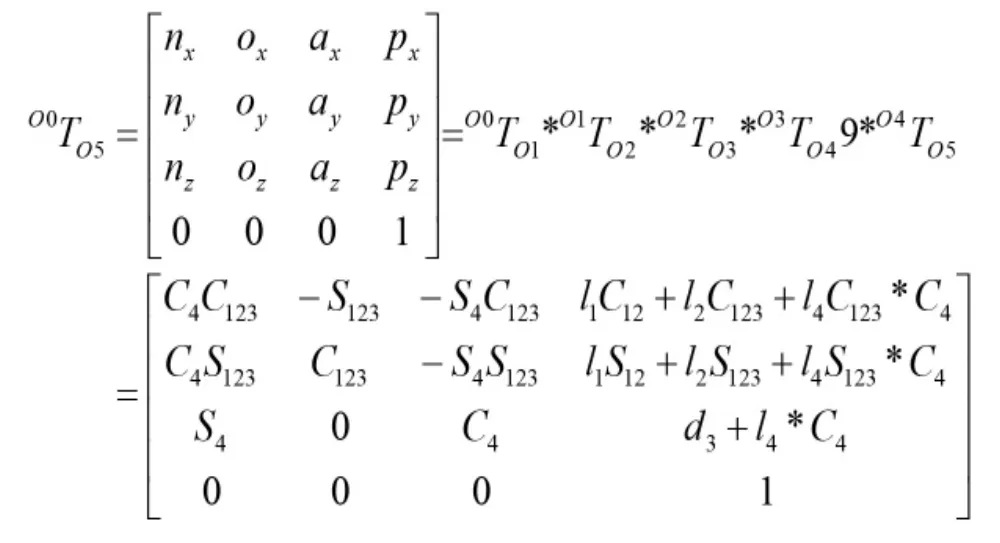
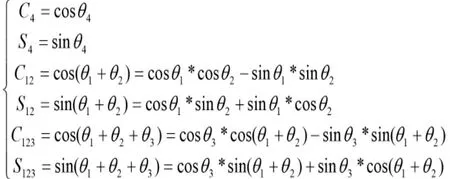
其中:
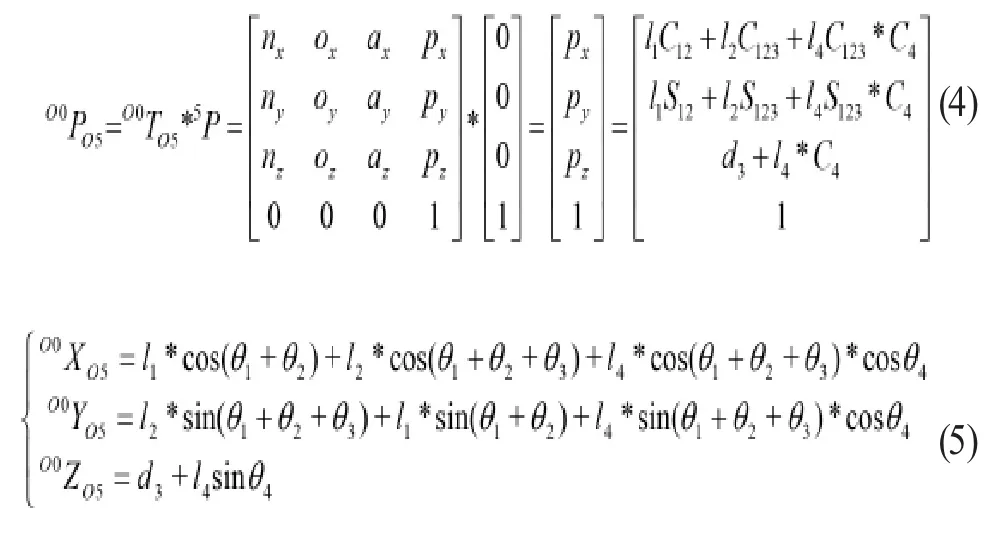
挖斗齒尖在坐標系O5-X5Y5Z5中的位置坐標5P=[0 0 0I],則其在基坐標中的位置可用模型公式(5)表示[6]:
三、挖掘機工作裝置的運動學模型分析
機器人手臂的運動學研究內容是機械手各個連桿坐標系之間的位置關系,從而進行機械手的運動仿真,驗證結構設計是否合理,繼而進行結構優化[5]。挖斗可偏轉挖掘機工作裝置是由許多連桿經由關節連接而成的運動系統,類似于機器人手臂。本文借鑒機器人手臂的運動學理論,研究挖斗可偏轉挖掘機工作裝置的運動學特征。
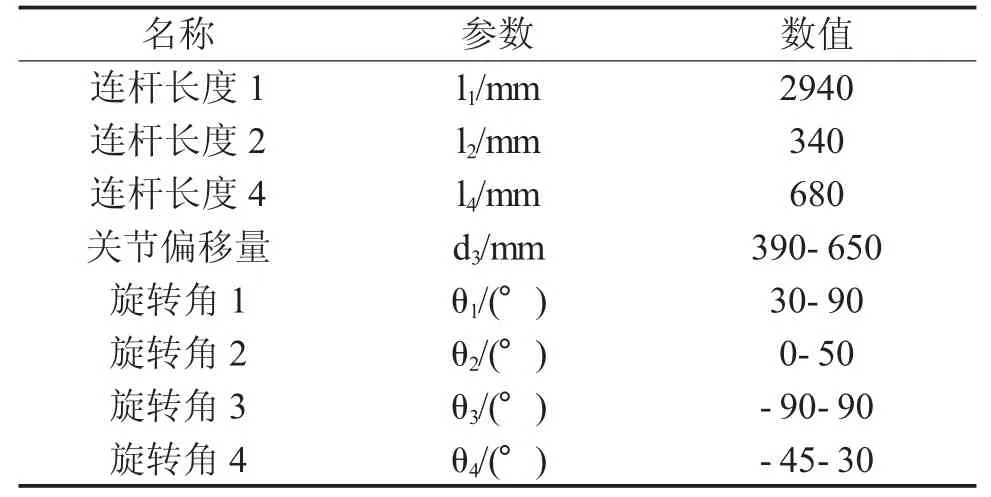
表2 仿真參數數值表
利用MATLAB數值仿真工具,將表2所示的各項仿真參數帶入模型公式(5)中,并將仿真結果與普通挖掘機的相應工作狀態進行比較,從而獲得如圖6所示的挖斗斗尖在Z軸方向的工作位置變化情況;另外將挖掘機斗齒齒尖在X-Y平面內運動散點稀釋后得到如圖7所示的挖掘機斗齒齒尖的X-Y平面內的運動區域圖。
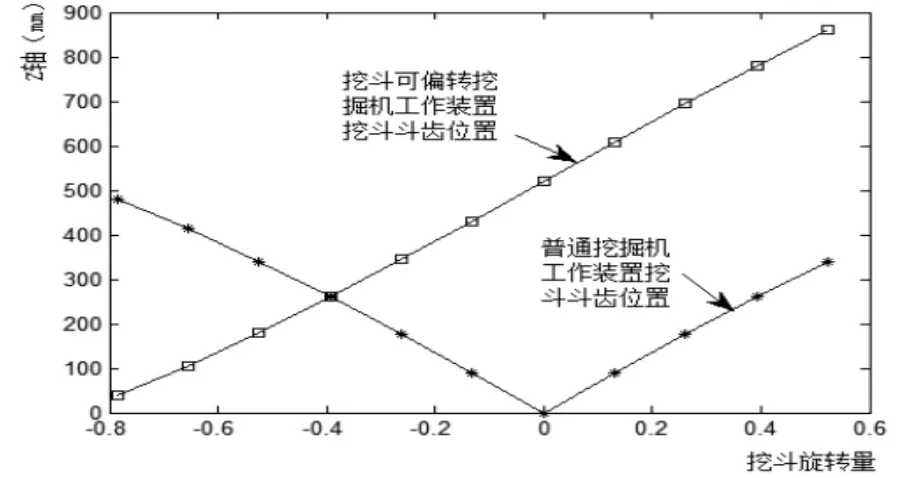
圖6 挖斗斗尖在Z軸方向的工作位置
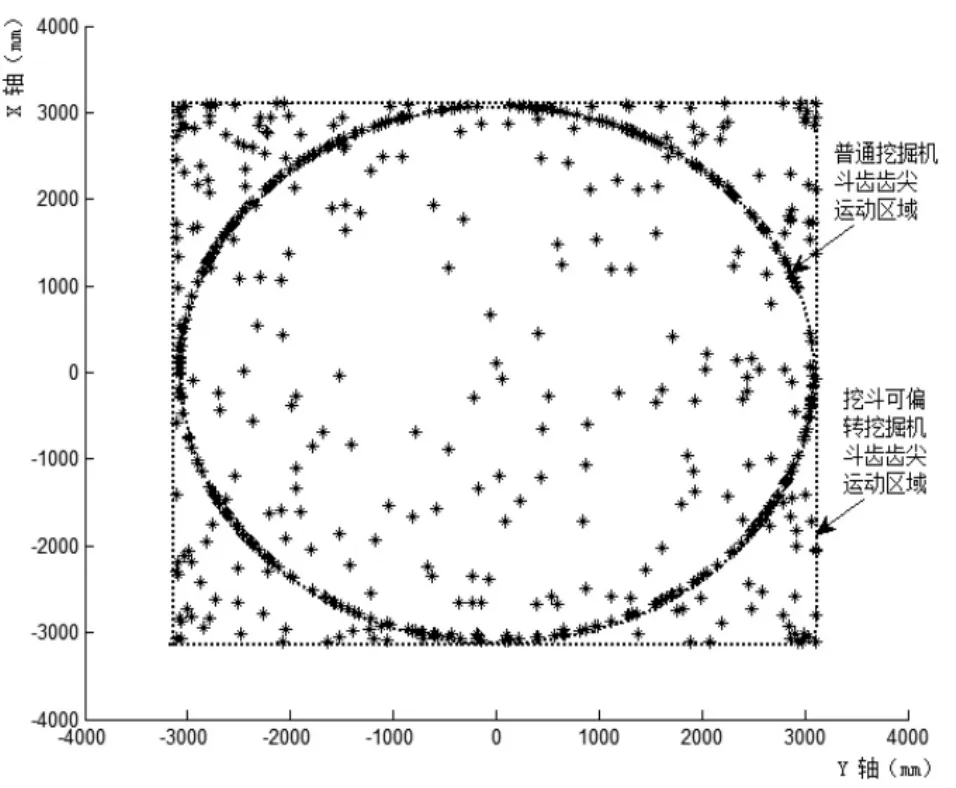
圖7 挖掘機斗齒齒尖的X-Y平面內的運動區域圖
從圖6中我們可以看出,挖斗可偏轉挖掘機工作裝置挖斗齒尖在Z軸的最大挖掘位置(本文未考慮挖掘機基座的旋轉運動)接近900mm,達到862mm;當θ3=0°時,挖斗無發生旋轉,挖斗可偏轉挖掘機工作裝置可看作是普通挖掘機工作裝置,此時挖斗齒尖在Z軸的最大挖掘位置接近500mm,達到478mm。因此,挖斗可偏轉挖掘機工作裝置挖斗齒尖在Z軸的最大挖掘位置增加了80.3%。
從圖7中我們可以看出,挖斗可偏轉挖掘機工作裝置斗齒齒尖在X-Y平面內運動散點分布區域,即挖斗斗尖的工作區域近似為正方形,經計算其面積為39.52m3,當θ3=0°時,齒尖在X-Y平面內運動散點分布區近似為圓形,經計算面積為32.16m3。因此,挖斗可偏轉挖掘機工作裝置挖斗齒尖的工作區域增加了22.9%。
四、結語
“工欲善其事,必先利其器”,一款靈活性好的挖掘機,為挖掘工作提供方便。本文利用工業機器人的設計方法和理念分析了一種新型的挖斗可偏轉挖掘機工作裝置的結構性能,結果顯示: 挖斗可偏轉挖掘機工作裝置挖斗齒尖在Z軸的最大挖掘位置增加了80.3%,在X-Y平面內的工作區域增加了22.9%,驗證了其工作的靈活性,為其實踐應用提供理論依據。但本文只做了理論計算與分析,未進行實驗測試,后續重點工作應著力于實驗測試。
[1]張煥高,董延慶,檀潤華.一種挖掘機工作裝置旋轉機構[P].中國專利:ZL201210120520.7,2014-06-11.
[2]張晴晴,謝傲.一種挖掘機挖斗擺動機構[P].中國專利:ZL201520870150.8,2016.04.06.
[3]張晴晴,謝傲,龔智強.挖斗可偏轉挖掘機工作裝置結構設計與分析[J].綏化學院學報,2017(12):146-149.
[4]蔡自興.機器人學[M].北京:清華大學出版社,2009.
[5]孫樹棟.工業機器人技術基礎[M].西安:西北工業大學出版社,1996.
[6]黎波,嚴駿,曾擁華,等.挖掘機工作裝置運動學建模與分析[J].機械設計,2011(10):7-10.