天車系統(tǒng)關(guān)鍵技術(shù)研究
2018-06-07 06:48:25上海新創(chuàng)達(dá)智能科技有限公司
電子工業(yè)專用設(shè)備
2018年3期
關(guān)鍵詞:系統(tǒng)
上海新創(chuàng)達(dá)智能科技有限公司
(上海新創(chuàng)達(dá)智能科技有限公司,上海 201306)
天車系統(tǒng)作為AMHS系統(tǒng)關(guān)鍵組成,如圖1所示,主要結(jié)構(gòu)包括吊運(yùn)車、吊運(yùn)車軌道、升降裝置、抓取抓盤和供電系統(tǒng)等部分。吊運(yùn)車作為物料抓取、存放、通信的主要單元部件,是天車系統(tǒng)的關(guān)鍵部件,其性能的好壞,直接決定了天車系統(tǒng)的性能;吊運(yùn)車軌道作為天車系統(tǒng)的支撐單元,主要起導(dǎo)向和承力的作用;供電系統(tǒng)作為天車系統(tǒng)的電力單元,主要為天車系統(tǒng)提供電力、能源保障。
1 吊運(yùn)車技術(shù)
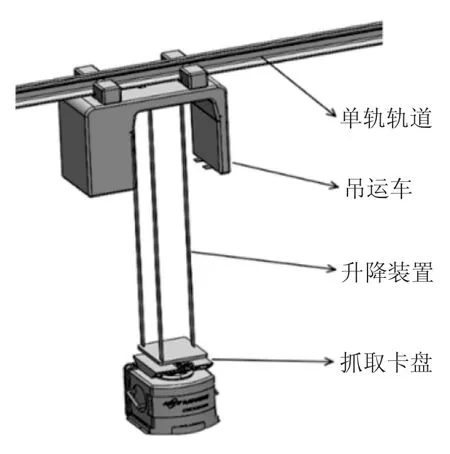
圖1 天車系統(tǒng)
吊運(yùn)車主要由吊運(yùn)車定位裝置、抓放裝置、通信模塊、傳感模塊和本體等部件組成。定位裝置可實(shí)現(xiàn)吊運(yùn)車相對于目標(biāo)物x、y和θ向的運(yùn)動控制,通過控制吊運(yùn)車的x、y和θ向運(yùn)動,可實(shí)現(xiàn)吊運(yùn)車在不同目標(biāo)之間的位置控制。抓放裝置用于實(shí)現(xiàn)物料的抓放,其主要由抓取卡盤、升降機(jī)構(gòu)和支撐固定機(jī)構(gòu)等部件組成,抓取卡盤可根據(jù)不同的物料進(jìn)行更換,以保證不同物料的使用需求;升降機(jī)構(gòu)采用滑輪組和帶傳動的組合,可實(shí)現(xiàn)位移的放大功能,提高運(yùn)動速度,增大運(yùn)動距離,減少提升拉力的作用;支撐固定結(jié)構(gòu)可以在吊運(yùn)車在抓取到物料后,對物料進(jìn)行固定保護(hù),防止物料在運(yùn)輸過程中出現(xiàn)傾倒、掉落等。吊運(yùn)車裝載無線通信模塊,可以保證吊運(yùn)車與系統(tǒng)之間保持實(shí)時(shí)通信。
天車系統(tǒng)的運(yùn)動流程:
(1)吊運(yùn)車通過無線通訊系統(tǒng)接受主機(jī)控制系統(tǒng)的運(yùn)動命令,x向運(yùn)動電機(jī)啟動,吊運(yùn)車移動到指定的工作位置;……
登錄APP查看全文
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
智能系統(tǒng)學(xué)報(bào)(2015年4期)2015-12-27 09:37:59