基于NI平臺的BCM硬件在環測試系統研究
2018-06-13 03:01:10嚴鑫
時代汽車 2018年11期
嚴鑫
江鈴控股有限公司 江西省南昌市 330030
1 引言
隨著消費者對汽車安全性、舒適性要求越來越高,汽車裝配的電子控制單元數目迅猛增加,為保證各個電子控制單元的性能穩定,在整車開發前期,就需要對所有控制模塊進行系統、全面的測試開發。而隨著汽車控制器的集成度與復雜度越來越高,測試所需要的人力、物力成本也大幅度提高,為解決這一難題,本文提出了一種自動化硬件在環測試系統方案,該方案在設計初期就開始對電子控制單元進行方案設計與功能驗證,不僅縮汽車控制器的開發周期,也降低了開發成本。

圖1 硬件在回路仿真原理
2 HIL測試系統概述
2.1 HIL測試原理介紹
HIL(Hardware In the Loop)測試主要是在實驗室環境下通過搭建模型進行仿真實驗,從而有針對性的進行汽車控制器的各種不同工況測試。該方法有以下優點:
(1)不需要在實驗臺架上就可以模擬各種復雜工況和故障模式;
(2)可以實現多個控制器自動化集成測試,易于后續維護及擴展;
硬件在回路仿真原理如圖1所示。在傳統測試中,ECU和真實被控對象形成閉環系統進行控制,硬件在回路仿真測試中ECU和仿真系統形成閉環系統進行控制。通過建立模型來代替真實被控對象,仿真模型將精準的輸入仿真對象的各種特性參數,后續,用戶只需要修改仿真模型中的參數就可以完成大部分模型的設計工作,目前該方式已經在很多商業模型中得到廣泛的應用。
2.2 HIL測試系統的組成
HIL測試系統的基本組成為:控制器(待測對象)、仿真硬件平臺、已校準的車輛模型及試驗管理軟件,如圖2所示。
3 系統硬件測試平臺介紹
3.1 概述
BCM HIL測試系統的硬件平臺組成包括:實時硬件系統,外圍硬件,綜合信號管理模塊,可編程電源,電源管理模塊等,外部還包括外置BOB。
3.2 實時硬件系統介紹
BCM測試系統的實時硬件采用的是基于PXI系統總線的NI系統,包括NI PXIe-1062機箱一個,一個PXIe-8840實時處理器板一個,和若干個信號處理器板(如FPGA 板,數據采集板卡,通訊板卡等)。該BCM測試系統是一個閉環測試系統,該閉環系統的工作過程主要是:通過控制器發出的各種控制信號給硬件接口,經過模型運算,后通過IO口輸出各種傳感器信號給控制器,最后與控制器構成一個閉環測試系統。
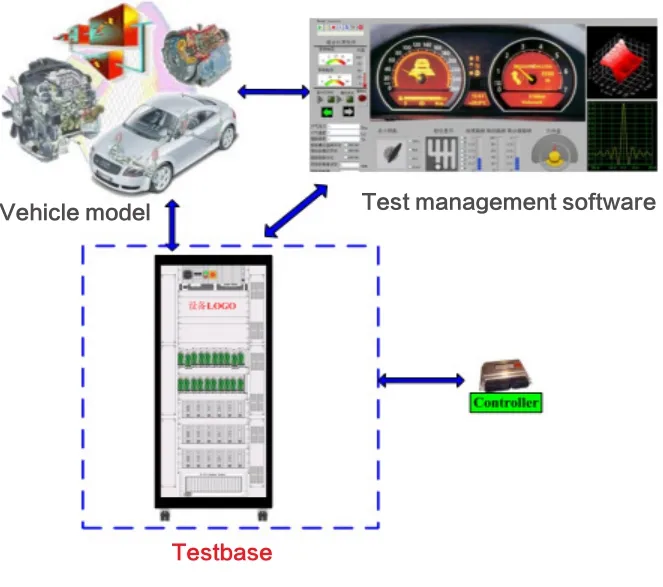
圖2 HIL 系統的組成

圖3 simulink模型導入到veristand流程圖
實時硬件系統就是提供實時模型運行的硬件環境,將模型運算出的結果轉化為電氣信號發送給控制器,同時采集控制器輸出的信號及硬件系統的信號(如電壓、電流、角度、速度等),通過轉化,參與到模型的計算中來。外圍硬件是為了實現特殊功能而研發的硬件,如故障注入板,電源切換等。綜合信號管理模塊主要是為了實現信號調理,分配等功能。斷路測試盒 BOB是為了方便測試。電源管理模塊則是為了整個測試系統的用電安全而設計的。
4 HIL測試軟件系統
4.1 測試環境配置
軟件系統主要包括汽車仿真模型、Veristand管理軟件以及自動測試用例等,自動化測試工程搭建后,以控制器單元引腳的電氣特性及接線原理為依據,為所測控制器分配硬件資源,包括板卡通道端子分配、負載類[2]型配置、CAN/LIN通道的配置等,以保證BCM各單元引腳與板卡通道資源配置連接一致,再通過上位機管理軟件Veristand實現對目標機的操作和利用,上位機管理軟件是測試工程師與實時處理器進行交互的轎梁,測試人員通過Veristand管理軟件實現對目標機的操作和利用。simulink模型導入到veristand流程如圖3所示。
4.2 測試用例編寫
自動測試用例是用來建立自動測試工程的測試方法,實現對被測BCM各功能的自動測試及自動生成測試報告,并能夠實時監測整個測試過程,INTES是基于 Eclipse RCP開發的自動測試執行軟件,主要用于自動測試序列搭建及序列執行。其主要功能包括:(1)測試項目管理;(2)測試序列搭建(包含用戶自定義庫管理);(3)測試序列執行;(4)測試報告生成;(5)數據字典變量映射;(6)底層硬件設備管理(HIL/EES/Diag/ECU)。
INTES軟件典型的應用流程如圖4所示。
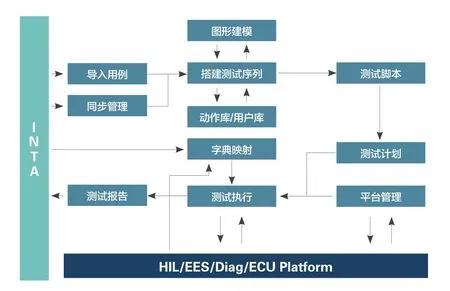
圖4 INTES使用流程圖
4.3 HIL系統測試執行
在測試運行過程可以通過各個窗口監測測試執行情況和測試信號值變化情況,測試完成后HIL系統將自動出具測試報告。
5 結論與展望
硬件在回路仿真是一種可行的測試手段,通過HIL可以在虛擬環境中對新的電控單元及軟件進行大量測試,這種測試系統能精準的模擬各種測試工況以及ECU的故障。因此它具有系統性強,穩定性高,測試覆蓋度高、可重復性強、測試周期短和測試結果一致性高等優點,同時還可以搭建自動測試序列,簡化了測試流程,提高了測試的效率,為HIL在汽車電氣功能測試中的廣泛應用提供了一定的依據和參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
