一種饋能型混合懸架的多模式協調控制
2018-06-19 01:02:36寇發榮魏冬冬
中國機械工程 2018年11期
寇發榮 魏冬冬 梁 津 田 蕾
西安科技大學機械工程學院,西安,710054
0 引言
可控懸架采用一個可控作動器取代了原被動懸架的相應部件,可根據路況變化實時調節懸架剛度或阻尼,以提高車輛的平順性和操縱穩定性[1-4],饋能型可控懸架在改善車輛動力學性能的同時,能回收懸架的振動能量[5-6]。
目前,饋能型可控懸架多采用傳動性能好、饋能效率高的電磁式懸架作動器,如直線電機式作動器、滾珠絲杠式作動器、電動靜液壓式作動器等。電磁式作動器在用于懸架主動控制時,能使懸架性能明顯改善,但作動器會消耗較多能量,降低車輛的燃油經濟性[7-8];電磁式作動器在用于懸架半主動控制時,能回收一定能量,但存在死區和電磁阻尼力不足的問題[9-11],使懸架達不到理想的半主動控制效果;電磁式作動器作為饋能裝置單一回收振動能量時,與半主動控制狀態相比能回收更多能量,但懸架性能與被動懸架相近[12]。與電磁式懸架作動器相比,磁流變減振器能通過控制磁流變液的磁場強度實現阻尼的連續、無級可調,用于懸架半主動控制時不存在死區現象[13-14],但單一的磁流變減振器無法回收振動能量,且在半主動控制時會消耗一定的能量。
為了實現懸架的主動控制、半主動控制以及回收部分懸架振動能量,本文提出了一種基于滾珠絲杠式作動器和磁流變減振器的車輛饋能型混合懸架結構。
1 饋能型混合懸架結構與原理
混合懸架系統的結構見圖1,主要由彈簧、磁流變減振器、滾珠絲杠式作動器、控制器、蓄電池以及相應的信號檢測裝置等組成。滾珠絲杠式作動器中的電機兼顧電動機和發電機的功能。
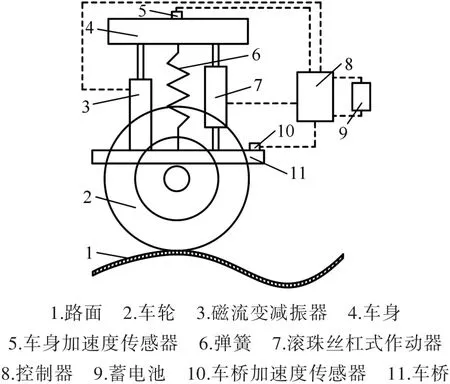
圖1 饋能型混合懸架結構圖Fig.1 Structure of regenerative energy hybrid suspension
饋能型混合懸架的工作原理為:控制器通過對相關信號的檢測和判斷,對混合懸架系統進行半主動或主動控制。對混合懸架半主動控制時,控制器控制磁流變減振器輸出半主動控制力,此時滾珠絲杠式作動器作為饋能裝置,將部分懸架振動的能量轉化為電能并存儲于蓄電池中;對混合懸架主動控制時,控制器控制滾珠絲杠式作動器輸出主動控制力,此時無控制電流通過磁流變減振器,磁流變減振器的功能相當于傳統的液壓減振器,主動控制時滾珠絲杠式作動器消耗的能量由蓄電池提供。
當饋能型混合懸架的電機無法正常工作時,可利用磁流變減振器對混合懸架進行半主動控制;當磁流變減振器損壞無法對懸架進行半主動控制時,可利用滾珠絲杠式作動器對混合懸架進行主動控制。
2 饋能型混合懸架動力學模型的建立
2.1 混合懸架動力學模型
本文建立了饋能型混合懸架系統的1/4車輛2自由度模型,見圖2。利用牛頓運動定律,得到其運動方程:

取狀態向量和輸出向量分別為

式中,ms為簧載質量;mu為非簧載質量;ks為彈簧剛度系數;F為控制力(半主動控制時為Fb,主動控制時為Fz);kt為輪胎剛度系數;qt為地面輸入位移;x2為簧載質量位移;x1為非簧載質量位移;cs為磁流變減振器的黏滯阻尼。
可得懸架狀態方程
式中,A、B、C、D分別為狀態矩陣、輸入矩陣、輸出矩陣和傳遞矩陣。
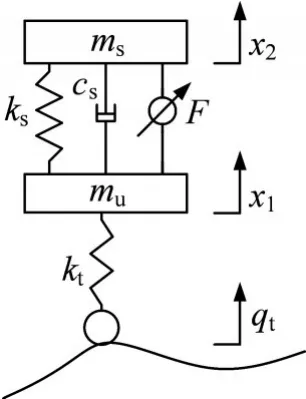
圖2 2自由度混合懸架力學模型Fig.2 Dynamic model of 2-DOF hybrid suspension
2.2 磁流變減振器數學模型
忽略磁流變液的摩擦力和液流慣性,磁流變減振器在混合工作模式的阻尼力[15]

式中,η為流體動力黏度;l為工作極板長度;h為工作極板間距;τy為磁流變液體的剪切應力;Ap為活塞的有效作用面積;b為工作極板的寬度。
由式(4)可知,磁流變減振器的阻尼力包括黏滯阻尼力Fn和庫侖阻尼力Fk,其中Fn與磁流變減振器的活塞運動速度存在函數關系;Fk與磁流變減振器的控制電流存在函數關系,所以可將式(4)轉變為

式中,ce、a1、a2、a3分別為多項式系數;Ik為磁流變減振器的控制電流。
對磁流變減振器進行特性試驗,對試驗結果進行回歸擬合分析,得 ce、a1、a2、a3分別為180、86、-38、120。該磁流變減振器的阻尼力

由式(4)~式(6)可知,磁流變減振器的 Fn不消耗能量,可以等效為傳統液壓減振器產生的阻尼力;混合懸架半主動控制時的控制力是通過調節Ik得到的庫侖阻尼力Fk。
磁流變減振器在半主動控制時的瞬時能耗功率

式中,ηb為減振器工作效率。
磁流變減振器的能耗

2.3 滾珠絲杠式作動器數學模型
混合懸架主動控制時,滾珠絲杠式作動器中的電機作為電動機工作,忽略電動機電感時,電動機的輸入電壓E和輸出轉矩Tm分別為
式中,u為感應電動勢;kT為電機電磁轉矩系數;Iz為電機電流;r為電機內阻;L為滾珠絲杠導程;ke為電機反電動勢系數。
混合懸架主動控制時的瞬時能耗功率

聯立式(9)~式(14)得
式中,ηz為滾珠絲杠式作動器傳動效率;Wz為電動機的能耗。
懸架饋能時滾珠絲杠式作動器產生的電磁阻尼力

式中,R為饋能電路的等效電阻。
懸架饋能時的瞬時饋能功率

懸架饋能能量

3 混合懸架多模式協調控制
3.1 電磁阻尼力反饋調節的半主動模式
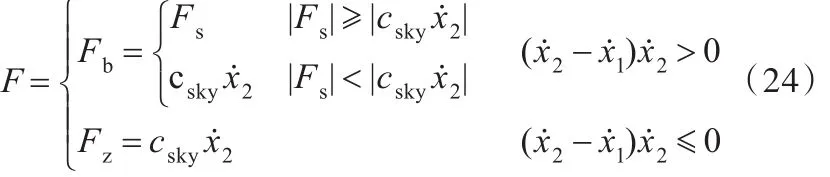
天棚算法具有運算簡便、響應速度快、魯棒性強等優點,因此混合懸架系統在半主動和主動控制時均采用天棚控制算法。磁流變減振器只能在(x˙2-x˙1)x˙2> 0 時起到半 主動控制作用,所以混合懸架的理想半主動控制狀態為

式中,csky為天棚系數。
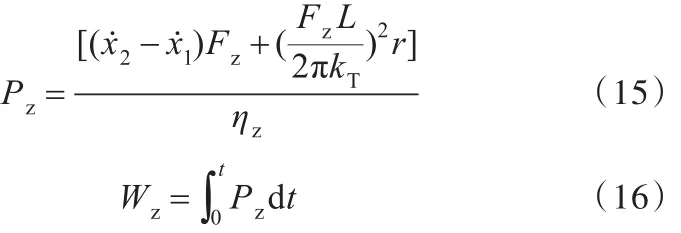
由式(20)可知,csky一定時,混合懸架的理想半主動控制力 cskyx˙2僅與 x˙2相關,但此時作為饋能裝置的滾珠絲杠式作動器會產生電磁阻尼力Fs,并作用于懸架,使懸架的實際半主動控制力與cskyx˙2存在差異。圖3為混合懸架半主動控制時各阻尼力對比圖。
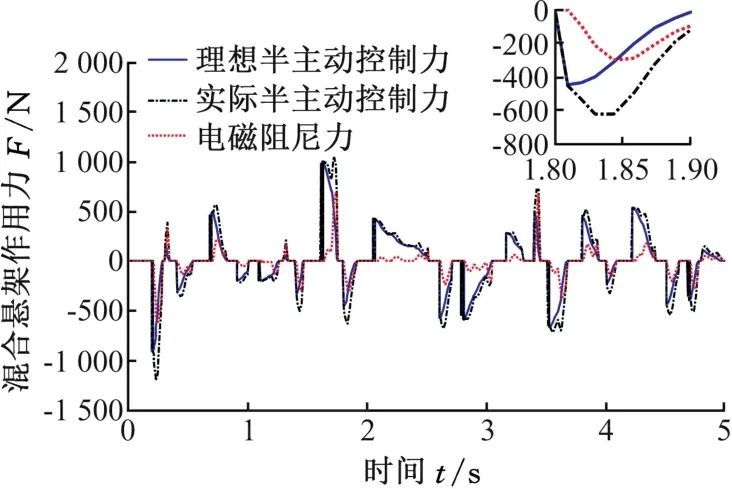
圖3 混合懸架半主動控制時各阻尼力對比Fig.3 Damping comparison of hybrid suspension semi-active controlled
由圖3可知,與理想半主動控制力相比,混合懸架的實際半主動控制力存在劇烈波動,實際半主動控制力的絕對值在某些時刻遠大于|cskyx˙2|,控制力的劇烈變化會使懸架達不到理想的半主動控制效果。利用電磁阻尼力反饋調節的方法減小cskyx˙2與實際半主動控制力間的差值,方法如下:當|cskyx˙2|>|Fs|時,混合懸架的半主動控制力由磁流變減振器和滾珠絲杠式作動器同時提供,此時控制器向磁流變減振器輸入可控電流Ik,使磁流變減振器輸出的庫侖阻尼力 Fk=cskyx˙2-Fs;當|cskyx˙2|≤ |Fs|時,混合懸架的半主動控制力為滾珠絲杠式作動器輸出的電磁阻尼力Fs,此時無可控電流Ik輸入磁流變減振器,磁流變減振器的功能相當于傳統的液壓減振器。由此,混合懸架半主動控制時不存在傳統電磁式半主動懸架的死區,利于提高懸架的半主動控制效果。
有反饋調節時混合懸架的半主動控制力

有反饋調節時磁流變減振器輸出的庫侖阻尼力

由式(20)~式(22)可知,有電磁阻尼力反饋調節時磁流變減振器輸出的|Fk|會減小,由式(7)和式(8)可知,|Fk|減小時,磁流變減振器的能耗會隨之減小,利于改善車輛的燃油經濟性。
混合懸架有無電磁阻尼力反饋調節時,懸架半主動控制力大小對比見圖4。

圖4 混合懸架的半主動作用力Fig.4 Semi-active force of hybrid suspension
由圖4可知,混合懸架的理想半主動控制力均方根為310.8 N,無電磁阻尼力調節時懸架半主動控制力均方根為349.8 N,有電磁阻尼力調節時懸架半主動控制力均方根為318.1 N;無電磁阻尼力反饋調節時懸架半主動控制力與理想半主動力間相差12.55%,有電磁阻尼力反饋調節時懸架半主動控制力與理想的半主動力相差2.35%,所以有電磁阻尼力反饋調節時懸架實際半主動控制力波動幅度較小,利于提高混合懸架的半主動控制效果。圖5所示為有無反饋調節時混合懸架半主動控制動態響應。
混合懸架半主動控制的響應均方根值見表1。由表1可知:與被動懸架相比,有電磁阻尼力反饋調節時混合懸架的簧載質量加速度、懸架動撓度、輪胎動載荷分別降低了18.51%、20.76%、8.25%;與無電磁阻尼力反饋調節相比,有電磁阻尼力反饋調節時混合懸架的簧載質量加速度、懸架動撓度、輪胎動載荷分別降低了2.56%、7.05%、4.35%。
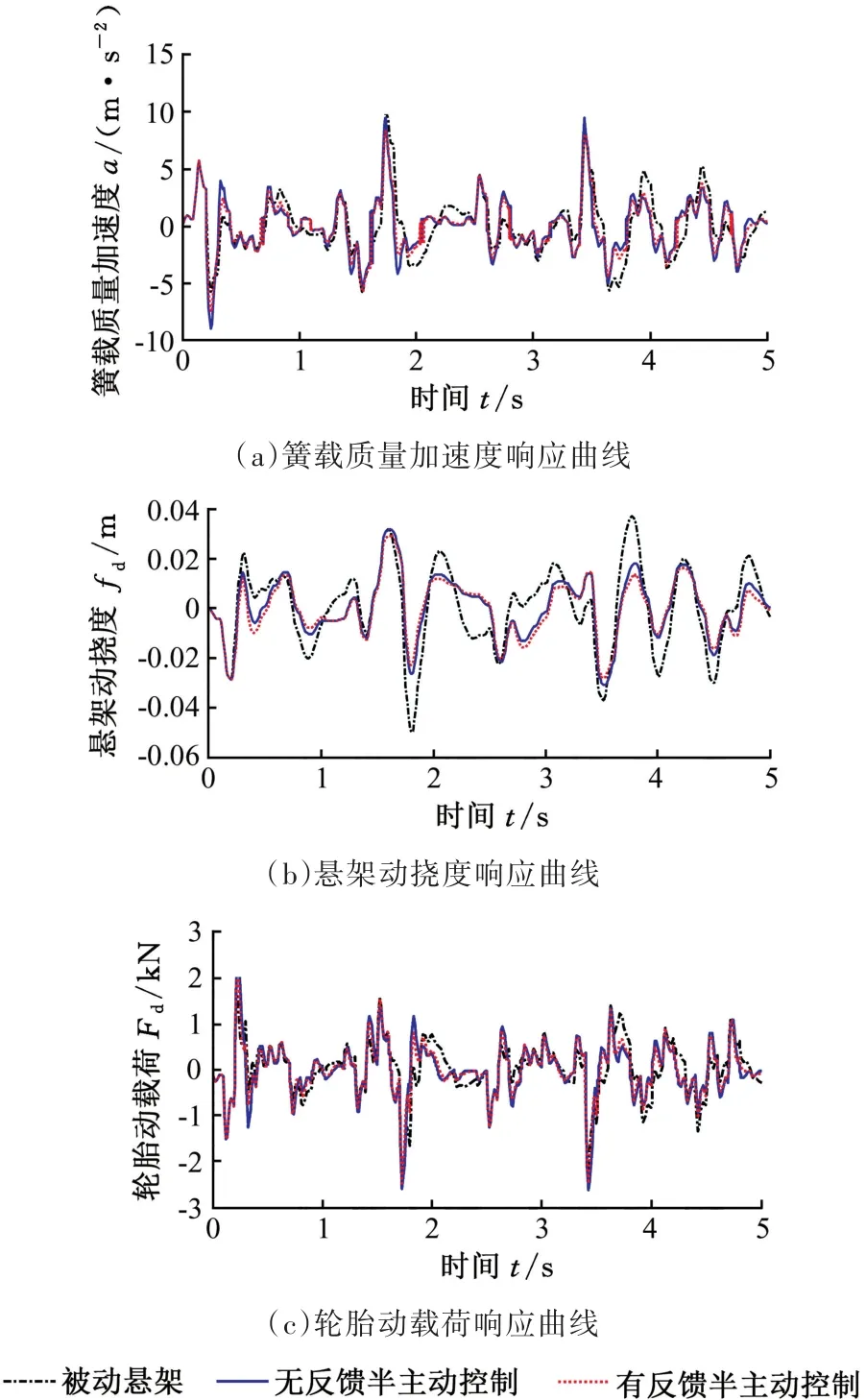
圖5 混合懸架半主動控制動態響應Fig.5 The dynamic response of hybrid suspension semi-active controlled
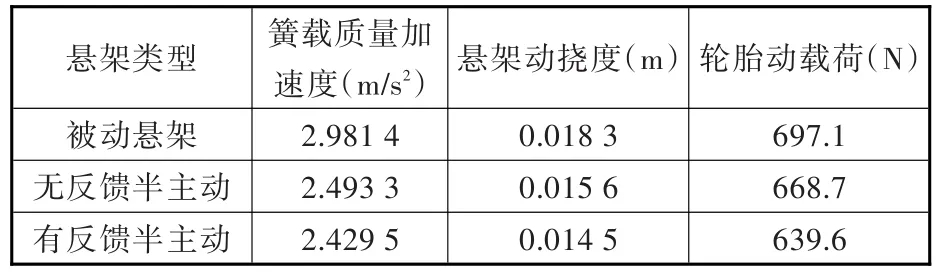
表1 混合懸架半主動控制響應均方根Tab.1 The root mean square value of hybrid suspension semi-active controlled response
由式(8)和式(19)可得混合懸架在半主動控制時系統總能量:

由式(23)可得混合懸架在半主動控制模式時系統總能量隨時間變化曲線,如圖6所示。由圖6可知,無電磁阻尼力反饋調節時混合懸架系統總能量為2 J,而有電磁阻尼力反饋調節時混合懸架系統總能量為129 J。
3.2 主動控制模式
滾珠絲杠式作動器可以在任何懸架狀態向混合懸架系統提供主動控制力,主動控制時電機作為電動機工作且消耗一定的能量。圖7所示為混合懸架主動控制的動態響應。
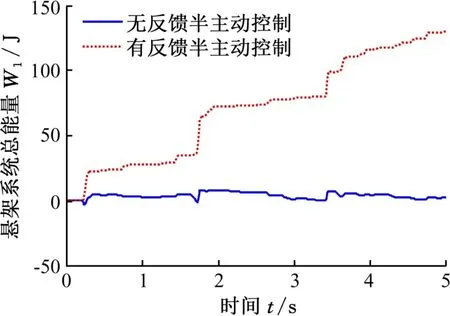
圖6 混合懸架半主動控制系統能量Fig.6 The system energy of hybrid suspension semi-active controlled
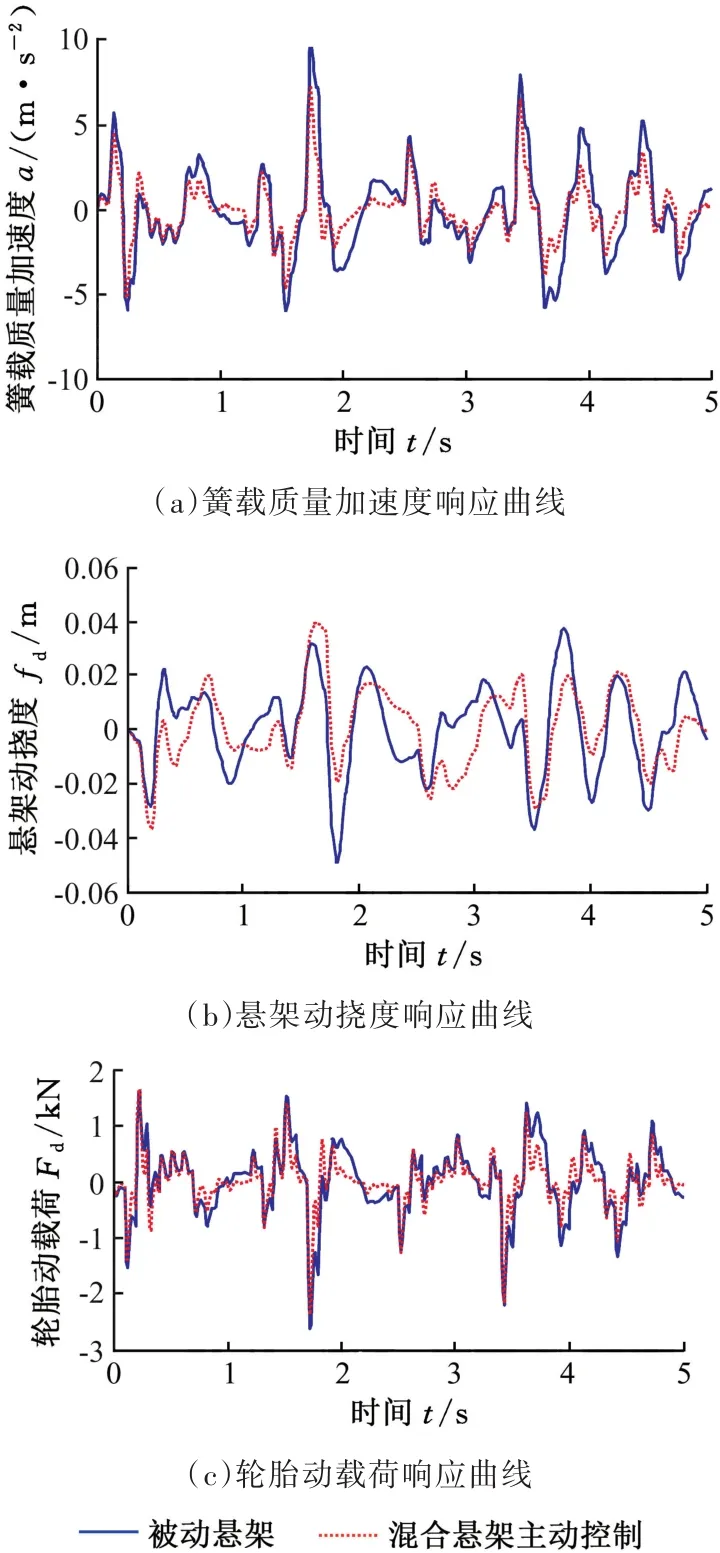
圖7 混合懸架主動控制的動態響應Fig.7 The dynamic response of hybrid suspension active controlled
混合懸架主動控制的響應均方根值見表2。由表2可知,與被動懸架相比,混合懸架在主動控制時的簧載質量加速度、懸架動撓度、輪胎動載荷分別降低了38.17%、17.49%、22.44%。
由式(16)可得混合懸架在主動控制模式時的能耗隨時間變化曲線,如圖8所示。由圖8可知,混合懸架在主動控制時系統耗能為251 J。
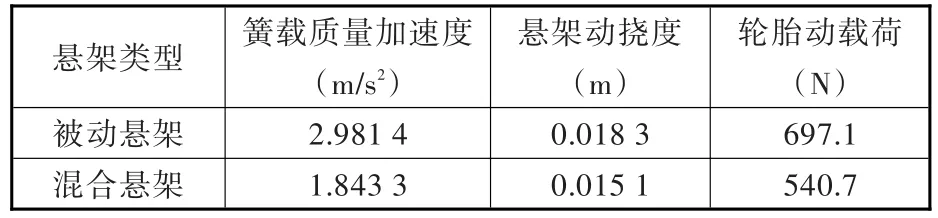
表2 混合懸架主動控制響應均方根Tab.2 The root mean square value of hybrid suspension active controlled response
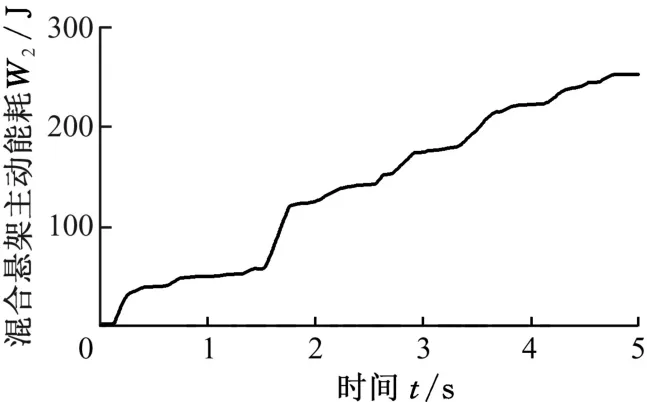
圖8 混合懸架主動控制的能耗Fig.8 The energy consumption of hybrid suspension active controlled
3.3 協調控制器的設計
混合懸架主動控制時懸架隔振性能好但能耗高;混合懸架半主動控制時懸架經濟性能好但控制具有局限性。考慮滾珠絲杠式作動器可在任何懸架狀態實現對混合懸架的主動控制,設計了混合懸架的多模式協調控制策略:
混合懸架的多模式協調控制框見圖9。
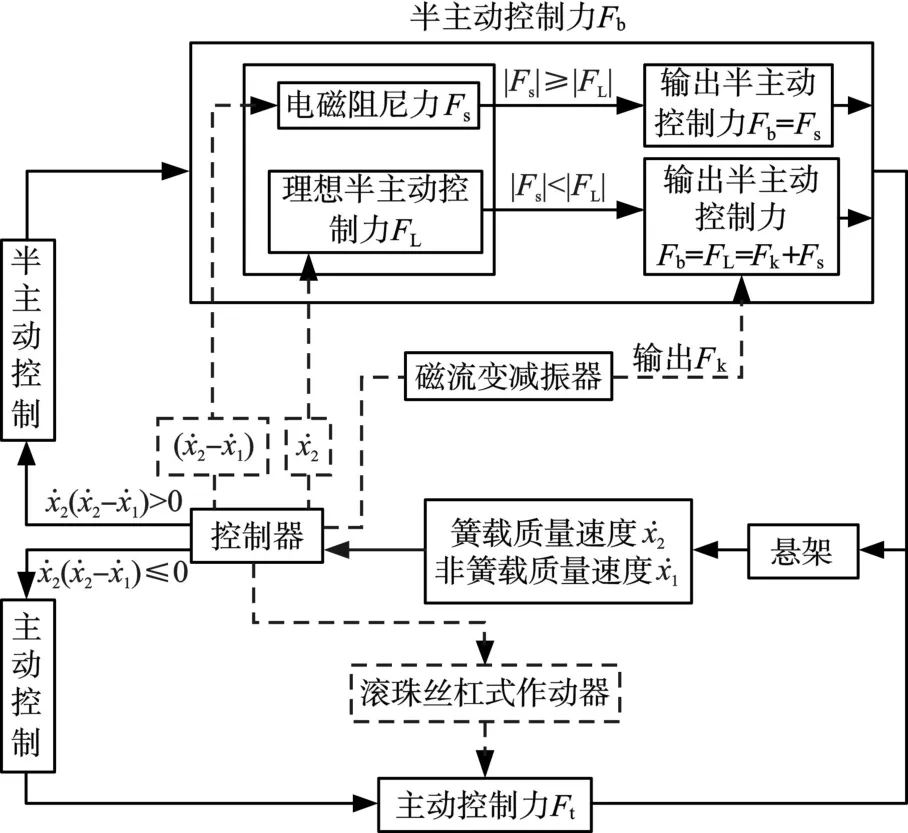
圖9 協調控制框圖Fig.9 The block diagram of hybrid suspension coordination controlled
由式(8)、式(16)和式(19)得混合懸架協調控制時系統總能量

混合懸架系統在協調控制時的平順性能和經濟性能主要受csky和 R的影響。不同csky和R時,混合懸架的簧載質量加速度均方根值和懸架系統總能量分別見圖10和圖11。由圖10和圖11可知,在小的csky和R時,混合懸架系統易實現自供能,但平順性能較差;在大的csky和 R時,混合懸架系統的平順性能較好,但經濟性能較差。為了兼顧混合懸架的動力性能和經濟性能,折中設計混合懸架協調控制器的csky和R分別為1 600 N·s/m、2Ω 。
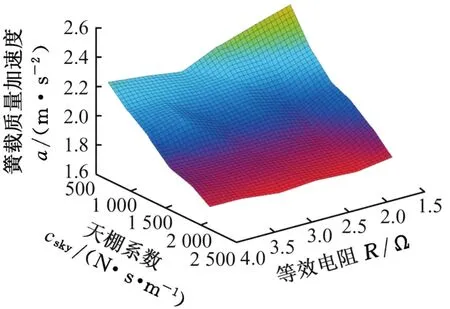
圖10 不同R和csky時混合懸架的簧載質量加速度Fig.10 The body acceleration of hybrid suspension at differentRandcsky

圖11 不同R和csky時混合懸架系統的能量Fig.11 The energy of suspension system at differentRandcsky
利用MATLAB/Simulink軟件對混合懸架多模式協調控制進行仿真,仿真時與懸架的單一主動控制模式進行對比分析。仿真車速為20 m/s,路面為B級,時間為5 s。混合懸架系統的主要參數如下:ms=210 kg,mu=38 kg,ks=22 366 N/m,kt=20 kN/m,cs=1 400 N·s/m,L=0.014 m,kT=0.082 N·m/A,r=0.5Ω ,ηz=0.97,ηb=0.98,csky=1 200 N·s/m。懸架在單一主動控制模式時的減振器采用車輛原有減振器,其阻尼值c0為1 600 N·s/m。
混合懸架多模式協調控制的動態響應曲線見圖12,響應均方根見表3。由表3可知:與被動懸架相比,混合懸架的簧載質量加速度、懸架動撓度、輪胎動載荷分別降低了36.23%、8.74%、10.50%;與懸架的單一主動控制模式相比,混合懸架的簧載質量加速度降低了6.08%,但懸架動撓度和輪胎動載荷分別提高了15.17%和8.13%。
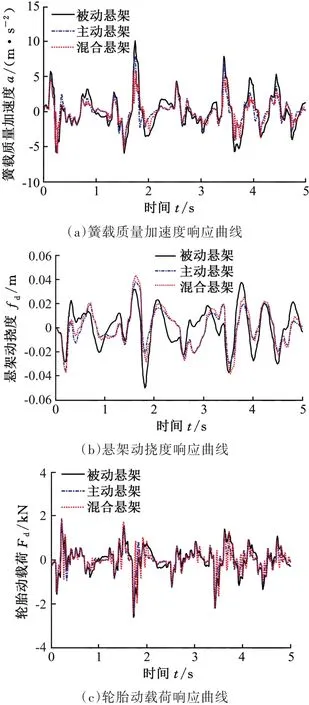
圖12 混合懸架協調控制的動態響應Fig.12 The dynamic response of hybrid suspension coordination controlled
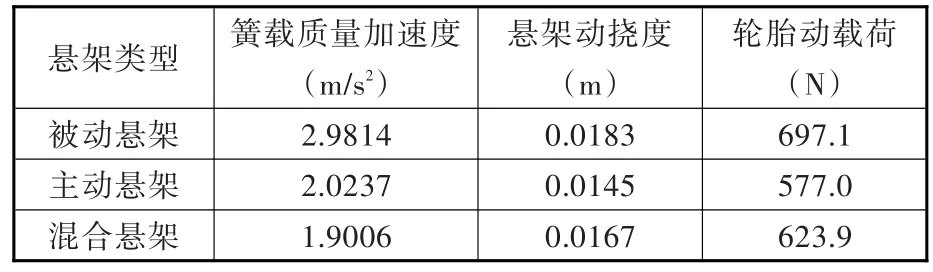
表3 混合懸架協調控制的響應均方根Tab.3 The root mean square value of hybrid suspension coordination controlled response
由式(16)和式(25)可得不同懸架系統總能量隨時間的變化曲線,見圖13。由圖13可知:懸架在單一主動控制模式時系統總能量為-225 J,而混合懸架在協調控制時系統總能量為2 J;因此混合懸架在顯著減振的同時系統實現了自供能。

圖13 不同懸架系統的能量變化Fig.13 The energy changes of different suspension system
4 試驗與分析
為了驗證饋能型混合懸架系統在多模式協調控制時的減振效果,設計了混合懸架振動試驗測試系統,如圖14所示。
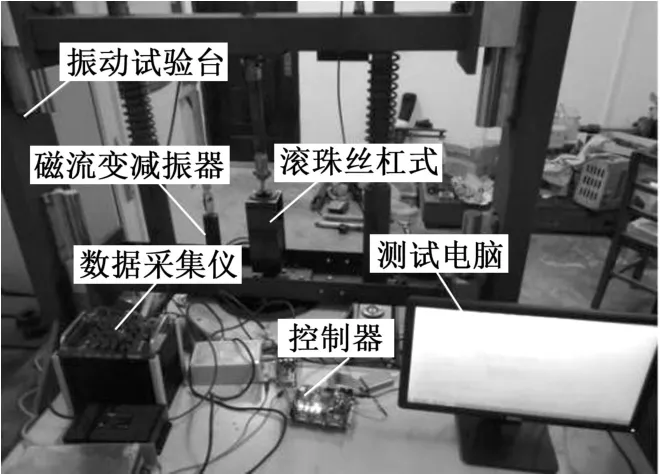
圖14 饋能型混合懸架試驗系統Fig.14 The test system of regenerative energy hybrid suspension
由于試驗條件限制,試驗中只測得了簧載質量加速度的動態響應。隨機路面譜輸入時,混合懸架多模式協調控制的簧載質量加速度響應結果見圖15,功率譜曲線見圖16。由圖15和圖16可知,在隨機路面譜輸入下,混合懸架的簧載質量加速度均方根下降了30.05%,且在不同頻域時懸架動態響應良好。試驗過程中忽略了滾珠絲杠式作動器和磁流變減振器的非線性因素,一方面使試驗測得的簧載質量加速度衰減幅度小于仿真結果,另一方面使混合懸架在車輪固有頻率12 Hz附近隔振效果不佳。
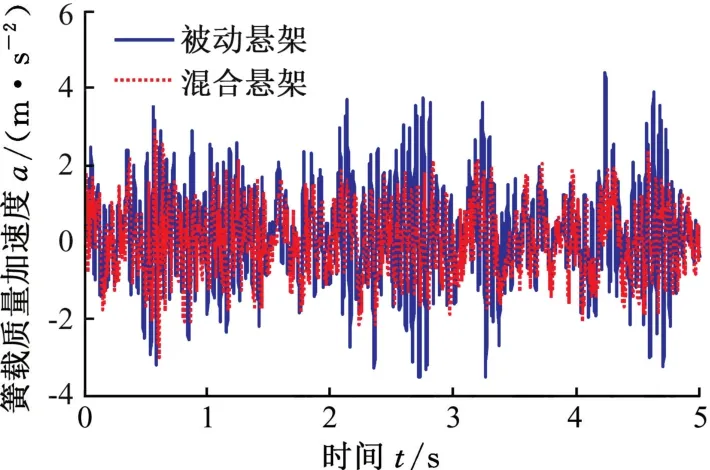
圖15 混合懸架簧載質量加速度響應Fig.15 The response of hybrid suspension body acceleration
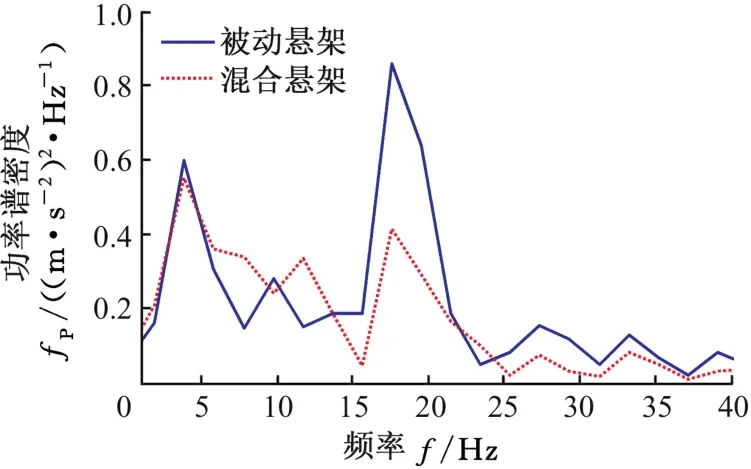
圖16 簧載質量加速度功率譜曲線Fig.16 The power spectrum curve of body acceleration
5 結論
(1)利用滾珠絲杠式作動器和磁流變減振器,提出并設計了一種饋能型混合懸架結構。
(2)建立了1/4車2自由度饋能型混合懸架動力學模型,分析了混合懸架的半主動控制模式和主動控制模式,設計了混合懸架的多模式協調控制器,并在MATLAB/Simulink軟件中建立了混合懸架多模式協調控制仿真模型。結果表明:混合懸架協調控制時動態響應良好,在顯著減振的同時實現了其懸架系統的自供能。
(3)開展了混合懸架多模式協調控制效果驗證試驗。結果表明:與被動懸架相比,隨機路面譜輸入時混合懸架的簧載質量加速度均方根下降了30.05%,混合懸架的隔振性能良好。
[1] KURIMOTO M,YOSHIMURA T.Active Suspension of Passenger Cars Using Sliding Mode Controllers(Based on Reduced Models)[J].International Journal of Vehicle Design,2014,19(4):402-414.
[2] 周兵,呂緒寧,范璐,等.主動懸架與主動橫向穩定桿的集成控制[J].中國機械工程,2014,25(14):1978-1983.ZHOU Bing,LYU Xuning,FAN Lu,et al.Integrated Control of Active Suspension System and Active Roll Stabilizer[J].China Mechanical Engineering,2014,25(14):1978-1983.
[3] WEEKS D A,BRESIE D A,BENO J H,et al.The Design of an Electromagnetic Linear Actuator for an Active Suspension[C]//International Congress&Exposition,2015.
[4] 王大勇,王慧.基于變論域模糊控制的車輛半主動懸架控制方法[J].中國機械工程,2017,28(3):366-372.WANG Dayong,WANG Hui.Control Method of Vehi-cle Semi Active Suspensions Based on Variable Universe Fuzzy Control[J].China Mechanical Engineering,2017,28(3):366-372.
[5] 寇發榮,杜嘉峰,王哲,等.電液半主動饋能懸架非線性建模與協調性優化[J].中國機械工程,2017,28(14):1701-1707.KOU Farong,DU Jiafeng,WANG Zhe,et al.Nonlinearmodeling and Coordinate Optimization of Semi-active EnergyRegenerativeSuspensionswithElectro-hydraulic Actuators[J].China Mechanical Engineering,2017,28(14):1701-1707.
[6] ZAREH S H,SARRAFAN A,KHAYYAT A A A,et al.Intelligent Semi-active Vibration Control of Eleven Degrees of Freedom Suspension System Using Magnetorheological Dampers[J].Journal of Mechanical Science&Technology,2012,26(2):323-334.
[7] SAGIV B D,BOBROVSKY B Z.Actively Controlled Vehicle Suspension with Energy Regeneration Capabilities[J].Vehicle System Dynamics,2011,49(6):833-854.
[8] 黃昆,張勇超,喻凡,等.電動式主動饋能懸架綜合性能的協調性優化[J].上海交通大學學報,2009,43(2):226-230.HUANG Kun,ZHANG Yongchao,YU Fan,et al.Coordination Optimization for Synthetical of Comprehensive Performance[J].Journal of Shanghai Jiaotong University,2009,43(2):226-230.
[9] 趙廉健.基于分級變壓的ESASRE作動器及控制的設計[D].鎮江:江蘇大學,2015.ZHAO Lianjian.Design of Actuator and Control System for Electromagnetic Semi-active Suspension Reclaiming Energy Based on Variable Battery Charge Voltage[D].Zhenjiang:Jiangsu University,2015.
[10] 王慶年,劉松山,王偉華,等.滾珠絲杠式饋能型減振器的結構設計及參數匹配[J].吉林大學學報(工學版),2012,42(5):1100-1106.WANG Qingnian,LIU Songshan,WANG Weihua,et al.Structure Design and Parameter Matching of Ball-screw Regenerative Damper[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(5):1100-1106.
[11] 陳龍,施德華,汪若塵,等.基于混合控制策略的饋能懸架半主動控制[J].北京理工大學報,2016,36(3):252-257.CHEN Long,SHI Dehua,WANG Ruochen,et al.Semi-active Control of Energy-regenerative Suspension Based on Hybrid Control Strategy[J].Transactions of Beijing Institute of Technology,2016,36(3):252-257.
[12] 許廣燦,徐俊,李士盈,等.電動汽車振動能量回收懸架及其特性優化[J].西安交通大學學報,2016,50(8):90-95.XU Guangcan,XU Jun,LI Shiying,et al.Energy Regenerative Suspension and Its Performance Optimization for Electric Vehicle[J].Journal of Xi'an Jiaotong University,2016,50(8):90-95.
[13] 馮占宗,陳思忠,梁義.磁流變半主動懸架動力學特性的試驗研究[J].汽車工程,2013,35(1):72-77.FENG Zhanzong,CHEN Sizhong,LIANG Yi.An Experimental Study on the Dynamic Characteristics of a Megnetorheological Semiactive Suspension[J].Automotive Engineering,2013,35(1):72-77.
[14] 寇發榮.汽車磁流變半主動懸架系統設計與試驗[J].農業機械學報,2016,47(4):280-287.KOU Farong.Design and Test of Vehicle Semiactive Suspension with MagnetorheologicalDamper[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(4):280-287.
[15] 李忠獻,徐龍河.新型磁流變阻尼器及半主動控制設計理論[M].北京:科學出版社,2012:22-25.LI Zhongxian,XU Longhe.A New Type of Megnetorheological Damper and Semiactive Control Design Theory[M].Beijing:Science Press,2012:22-25.