基于兩種接觸模型的柔性體間多次微碰撞問題研究
2018-06-23 02:54:56王檢耀劉鑄永洪嘉振上海交通大學工程力學系上海200240
振動與沖擊 2018年11期
王檢耀, 劉鑄永, 洪嘉振(上海交通大學 工程力學系,上海 200240)
工程中經(jīng)常會發(fā)生結構間的多次碰撞,如航天器對接時導向板之間的接觸碰撞[1];高速列車受電弓/接觸網(wǎng)間的碰撞振動[2];連桿機構的鉸間隙引起的反復沖撞[3]。多次碰撞會激發(fā)柔性體的高頻振動,影響機械系統(tǒng)的運行精度,而且往復碰撞對結構強度的破壞甚至高于單次高強度的碰撞[4]。
多次碰撞不僅指肉眼或聽覺能分辨的往復的宏觀碰撞。在一次短暫的宏觀的碰撞過程中,由于結構的彈性振動與碰撞發(fā)生相互作用,很有可能會發(fā)生多次間歇性“接觸-分離-再接觸”的微碰撞現(xiàn)象。Stoianovici等[5-6]在碰撞實驗研究中捕捉到了一次宏觀碰撞中的多次微碰撞過程。在碰撞問題的理論研究中,剛體碰撞理論[7-8]忽略了彈性振動,因此無法表現(xiàn)出多次微碰撞現(xiàn)象;高玉華等[9-10]利用應力波理論解析求解了柔性桿縱向碰撞問題,并解釋了多次微碰撞現(xiàn)象;對于柔性梁、板等結構的碰撞問題,段玥晨等[11]用假設模態(tài)法求解了柔性梁的多次碰撞問題,劉錦陽等[12]用動態(tài)子結構方法求解了太陽帆板鎖定時的撞擊問題,也有二次或多次微碰撞現(xiàn)象發(fā)生。對于復雜的三維結構的碰撞問題,更通用的做法則是用有限元方法求解。在有限元方法中,處理接觸碰撞的方法有兩種:接觸力元方法[13-14]和接觸約束方法[15]。接觸力元方法將接觸作用視為彈簧阻尼器力元,根據(jù)物體間的嵌入量直接由相應函數(shù)給出接觸力,又稱為罰函數(shù)法(Penalty Method,PM)。接觸約束方法將接觸作用視為接觸約束,接觸約束方程與帶Lagrange乘子的動力學方程聯(lián)立求得接觸力,又稱為Lagrange 乘子法或附加約束法(Lagrangian Method,LM)。
本文基于有限元法的三維實體單元模型,分別采用罰函數(shù)法和附加約束法對柔性結構間一次碰撞產(chǎn)生的多次微碰撞過程進行研究。利用點-面接觸對接觸域進行離散,分別推導了罰函數(shù)法和附加約束法的動力學方程,對桿-梁多次微碰撞問題進行仿真,研究了接觸剛度、網(wǎng)格尺寸等參數(shù)對多次微碰撞過程中碰撞次數(shù)、碰撞力峰值和碰撞時間的影響。
1 接觸域處理
在有限元方法中,為了精確描述接觸的作用,對接觸進行細致的空間離散化,在離散后的接觸域上形成多個接觸對,而接觸力元或約束施加在各個接觸對上。碰撞過程中,接觸點對的形成與分離表現(xiàn)了接觸區(qū)域的時變過程。最廣泛使用的接觸域離散形式為點-面接觸對(node to segment)。如圖1所示,把撞擊物體稱為從物體(slave body),被撞擊物體稱為主物體(master body),從物體上的一點i與主物體單元表面si上的最近投影點i′構成接觸對。接觸對間距矢量有如下形式
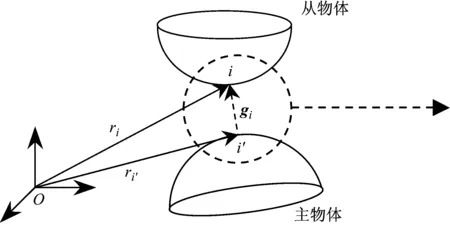
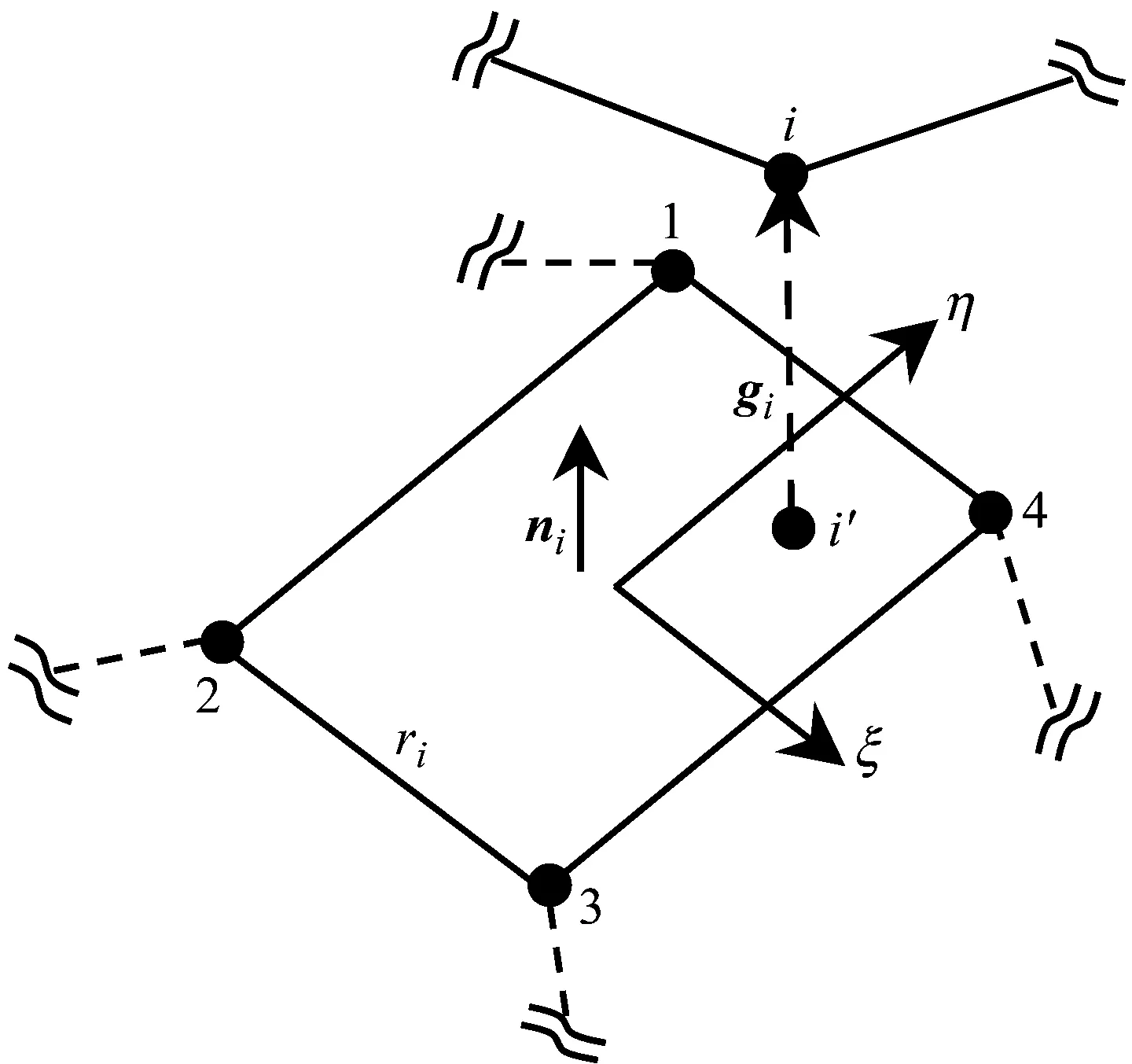
圖1 點-面接觸對Fig.1 A node-to-segment contact pair
gi=ri-ri′=ri0-ri′0+ui-ui′
(1)
式中:ri和ri′分別表示節(jié)點i和i′在慣性坐標系下位置;ui和ui′分別表示表示節(jié)點i和i′的位移。接觸點間的法向距離可以寫為
gNi=ni·gi
(2)
式中:ni主物體表面si上點i′位置的法向矢量。當gNi>0,表示沒有碰撞發(fā)生;當gNi=0,表示碰撞剛剛開始;當gNi<0,則表示接觸點對之間有互相穿透。
2 接觸作用的力學模型
系統(tǒng)中物體的相互作用有兩種力學模型:力元和約束。相應地,目前處理接觸/碰撞過程的方法有兩種:接觸力元方法和接觸約束方法。接觸力元方法將接觸作用視為彈簧阻尼器力元,力元根據(jù)接觸點對嵌入量直接由相應模型給出接觸力,又稱為罰函數(shù)法。接觸約束方法將接觸作用視為接觸約束,接觸約束方程與帶Lagrange乘子的動力學方程形成封閉的方程組,該方法又稱附加約束法。
2.1 罰函數(shù)方法
罰函數(shù)方法把碰撞力作為力元處理,檢測到接觸發(fā)生時,在接觸域內(nèi)的各接觸對間添加相應的接觸力元,直至分離。當碰撞發(fā)生時,從物體上的點i將嵌入主物體表面si,嵌入量δi=-gNi。罰函數(shù)法中給出嵌入與碰撞力的關系,從而通過嵌入量直接計算出碰撞力。罰函數(shù)法將接觸作用視為彈簧力元,接觸力大小表達為
Fi=kδi
(3)
式中:k為彈簧剛度,由主物體上si所在單元的體積模量Ki、單元體積Vi、接觸面面積Ai計算得到
(4)
式中:fs稱為罰因子,用于調(diào)節(jié)接觸剛度。
有限元中,接觸力需要分布到單元相關節(jié)點上。對于從物體接觸點i,節(jié)點力為Fi=kδini,對于主物體接觸單元表面,由節(jié)點j(j=1,2,3,4)組成,接觸作用的等效節(jié)點力表示為
(5)
式中:ξi′,ηi′是i′在表面si的局部坐標,Nj為插值函數(shù),表示為
(6)
接觸對i-si的接觸力可以寫為
(7)
從而在碰撞期間,系統(tǒng)的動力學方程為
(8)
式中:M為質量陣;u為位移矢量陣;Fint和Fext分別為內(nèi)力陣和外力陣;Fc為所有接觸點對的接觸力的組集。
罰函數(shù)方法的優(yōu)點在于不需要求解約束方程,且動力學方程的維數(shù)固定,不隨接觸狀態(tài)改變。其不足之處在于,需要人為選取合適的罰因子,且沒有統(tǒng)一的選取準則,需要根據(jù)經(jīng)驗多次試算才能獲得可靠結果。
2.2 附加約束方法
附加約束方法中,檢測到接觸發(fā)生時,根據(jù)互不穿透的約束條件,施加相應的約束方程。接觸約束方程與帶Lagrange乘子的動力學方程聯(lián)立求解運動學變量和接觸力。當從物體節(jié)點i接觸到主物體表面si時,位置形式的約束方程可以寫為
Φi(u)=ni·gi=0
(9)
把式(1)和式(6)代入式(9)中,得到:
(10)
當更多的節(jié)點進入接觸時,所有的接觸約束方程可以組集為
(11)
式中:m為接觸點對數(shù)。那么系統(tǒng)的動力學方程可寫為
(12)
式中:Φu是接觸約束矩陣的雅可比矩陣;λ是相應的Lagrange乘子。
為了求解式(11),對其二階求到后,得到加速度形式的約束方程
(13)
(14)
不同于罰函數(shù)方法,附加約束方法的優(yōu)點在于不需要人為選取剛度等參數(shù),并且互不嵌入的約束條件是嚴格滿足的。但是附加約束法中的約束方程增加了方程維數(shù),并且隨接觸狀態(tài)改變,另外微分-代數(shù)方程的數(shù)值求解也更加困難。
3 算 例
如圖2所示,為一柔性球頭圓柱桿撞擊兩端固支方形截面橫梁的三維有限元模型。分別使用罰函數(shù)方法和附加約束方法對該碰撞過程進行數(shù)值仿真。碰撞物體的幾何和材料參數(shù)列于表1中。
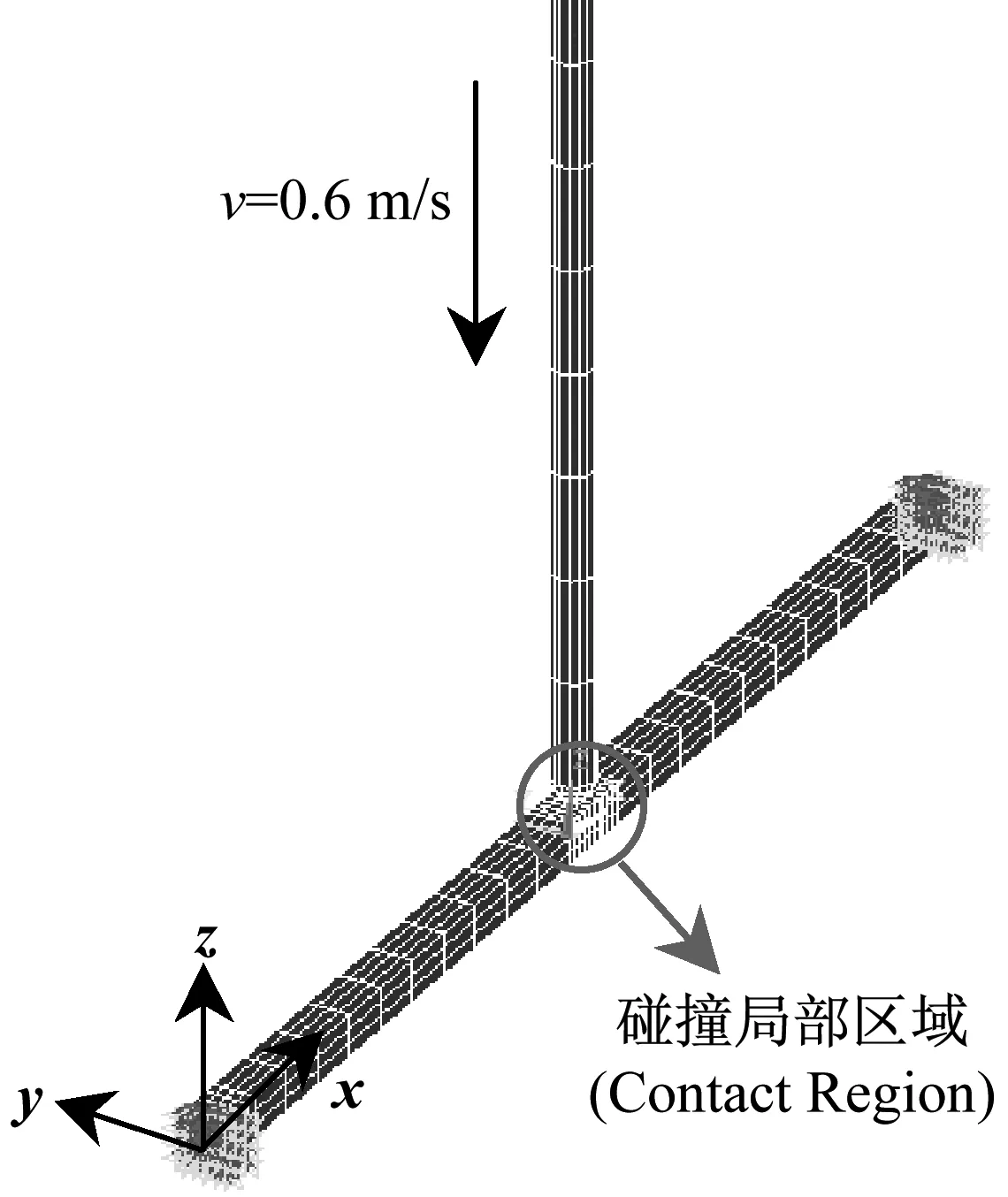
圖2 桿-梁撞擊的三維有限元模型Fig.2 FE model of the rod-beam impact case

表1 幾何與材料參數(shù)Tab.1 Geometrical and material parameters
3.1 罰因子的影響
罰函數(shù)方法中,罰因子的選取決定了接觸剛度的大小。為了研究罰因子的取值對碰撞結果的影響,分別對不同的罰因子進行仿真。不同罰因子下的碰撞力隨時間的歷程如圖3所示。當罰因子取值為0.01時,由于過小的接觸剛度導致碰撞時間明顯過長,并且碰撞力的峰值偏小。隨著罰因子值的增加,碰撞力和碰撞力時間逐漸收斂。罰因子取值0.5和1時,結果已經(jīng)幾乎一致,此時的罰因子是合適的,當繼續(xù)增大罰因子時,有可能因為過大的接觸剛度發(fā)生數(shù)值不穩(wěn)定。另外可以看到,當罰因子取值為0.01和0.1時,整個過程中碰撞力沒有過零,表示整個過程中接觸物體沒有分離;而當罰因子取值為0.5和1時,則可以看到碰撞力有多次過零。可以看到罰因子的選取不僅影響碰撞力峰值及碰撞持續(xù)時間,還影響碰撞過程的碰撞次數(shù)。因此,罰函數(shù)方法必須通過試算獲得合適的罰因子。

圖3 不同罰因子的碰撞力結果Fig.3 Contact force with different penalty factors
3.2 網(wǎng)格尺寸的影響
在使用有限元方法的接觸碰撞問題中,空間離散的網(wǎng)格尺寸對于仿真結果有很大的影響。在遠離碰撞局部的區(qū)域,網(wǎng)格尺寸應該能夠保證彈性波的傳播特征;在碰撞局部區(qū)域,則應使用更細密的網(wǎng)格來反映局部高應力的分布以及接觸域隨時間的演化歷程。本節(jié)將研究碰撞局部的網(wǎng)格尺寸對罰函數(shù)法和附加約束法的影響。
對于罰函數(shù)方法,如圖2所示,對碰撞局部區(qū)域用4種不同尺寸網(wǎng)格離散,而對于每一種網(wǎng)格,類似于3.1中的步驟,均需要重新選取合適的罰因子,同時網(wǎng)格尺寸越小,積分的步長也越小。網(wǎng)格尺寸信息及每種網(wǎng)格下的罰因子及時間步長信息均列于表2中。在每種網(wǎng)格下罰函數(shù)法計算得到的碰撞力曲線如圖4所示,可以看出,罰函數(shù)法的結果非常依賴于碰撞局部的網(wǎng)格尺寸,隨著網(wǎng)格變細,其結果逐步收斂于“精確解”。而對于附加約束方法,我們計算其在網(wǎng)格1下的結果,同樣作于圖4中,將它與罰函數(shù)方法在4種網(wǎng)格下的結果進行比較。我們發(fā)現(xiàn)附加約束法在網(wǎng)格1下的結果已經(jīng)與罰函數(shù)法在網(wǎng)格4下的“精確解”吻合。因此,可以認為罰函數(shù)法的結果精度更依賴于網(wǎng)格尺寸。由于罰函數(shù)法比附加約束法需要更細密的網(wǎng)格,因此在數(shù)值仿真中,罰函數(shù)法帶來更龐大的自由度并且需要更多的積分步數(shù)。兩者在計算耗時上的對比如表3所示,附加約束法在計算效率上有一定優(yōu)勢。總結來說,罰函數(shù)方法非常依賴于接觸局部的網(wǎng)格尺寸,只有當網(wǎng)格尺寸充分小時,才能預測出正確的多次微碰撞過程,包括碰撞力峰值、碰撞時間和碰撞次數(shù)。而附加約束方法在較粗的網(wǎng)格下已經(jīng)能獲得比較理想的結果。
表2 罰函數(shù)法的參數(shù)Tab.2 Parameters of penalty method
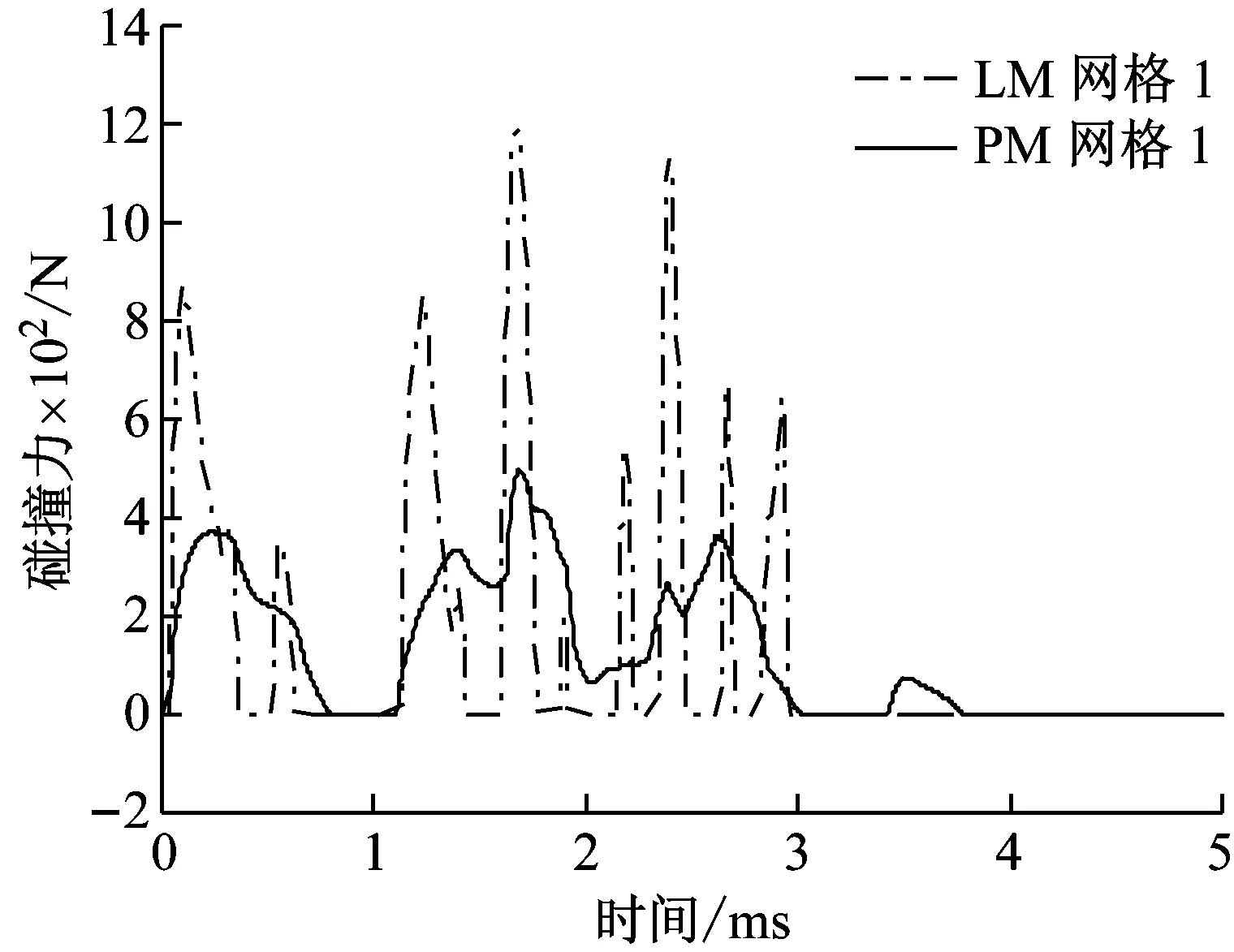
(a)

(b)

(c)
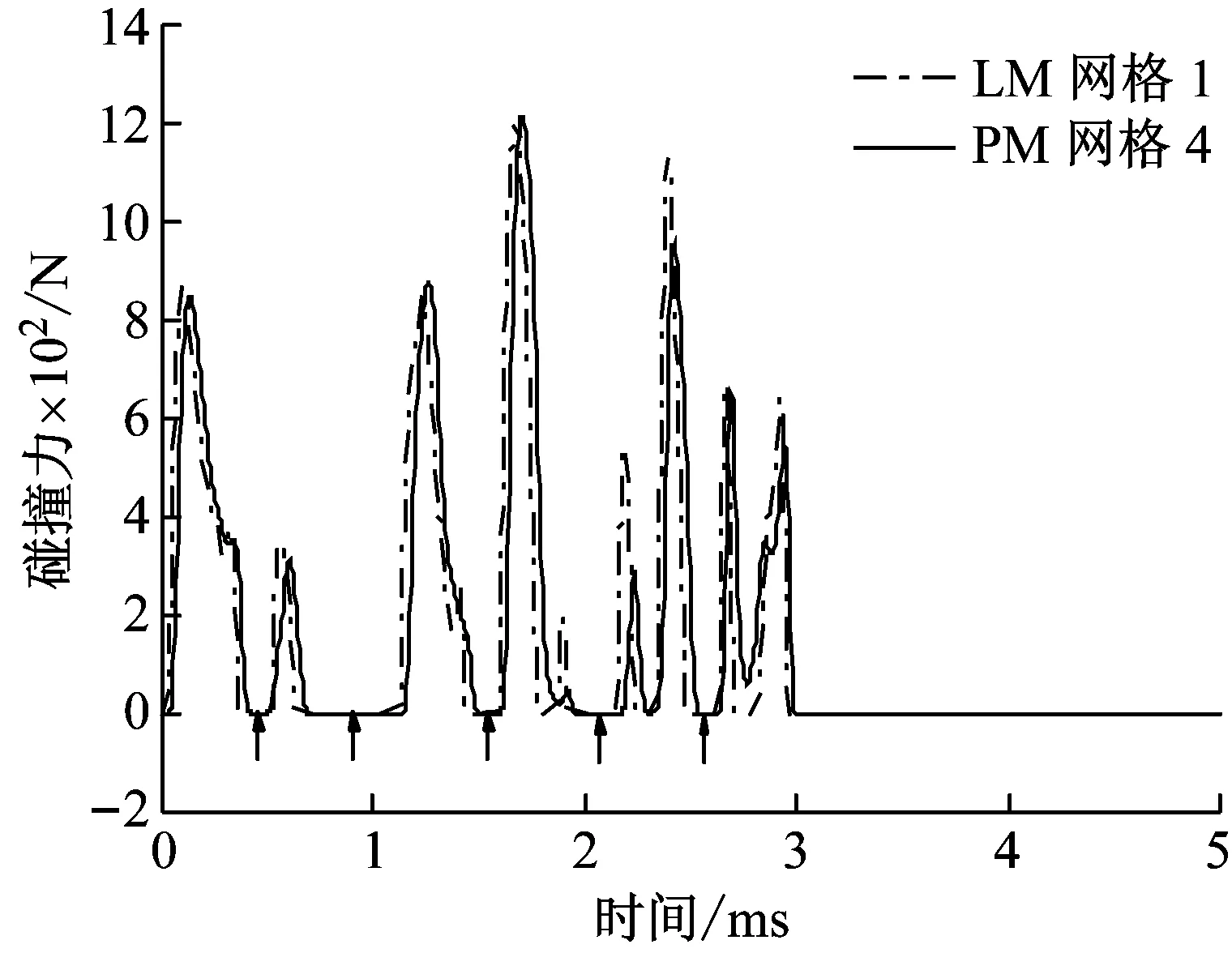
(d)圖4 網(wǎng)格尺寸對仿真精度的影響Fig.4 Influence of mesh size on simulation accuracy
上述過程得到了碰撞力歷程的數(shù)值收斂解,圖4(d)顯示出碰撞過程中碰撞力有多次過零。為了更直觀地展示碰撞過程中接觸點對的“接觸-分離-再接觸”現(xiàn)象,將桿上圓頭的中心撞擊點和梁上相應的被撞擊點的位置關系作于圖5中。可以看出由于彈性振動與碰撞的相互作用,使得桿和梁上的接觸點對發(fā)生了多次分離。另外聯(lián)系圖4(d)看出,接觸點對發(fā)生分離的時刻與碰撞力過零的時刻是一一對應的,說明該例中桿與梁的一次宏觀碰撞的確產(chǎn)生了多次微碰撞過程。

表3 罰函數(shù)法與附加約束法的計算規(guī)模比較Tab.3 Computation scale of the two contact methods

圖5 碰撞過程中接觸點對的位置Fig.5 The position of contact pair during the impact process
4 結 論
柔性體間的多次微碰撞行為會激發(fā)柔性體的高頻振動,往往會對結構造成各種形式的損害。傳統(tǒng)的方法多利用應力波理論求解簡單結構的多次微碰撞問題,為了能正確預測任意形狀柔性體間的多次微碰撞過程,本文基于有限元三維實體模型,分別用罰函數(shù)法和附加約束法對桿-梁碰撞問題進行仿真。對于罰函數(shù)方法,要對多次微碰撞過程中的碰撞力峰值、碰撞時間及碰撞次數(shù)進行準確預測,不僅需要選擇合適的罰因子,還需要細密的網(wǎng)格單元支撐。對于附加約束方法,不需要人為選取剛度參數(shù),并且即使在較粗糙的網(wǎng)格也能獲得可靠的結果。因此在對多次微碰撞問題的動力學仿真中附加約束方法有一定優(yōu)勢。數(shù)值仿真得到的收斂結果表明,由于彈性振動與碰撞的相互作用,一次宏觀碰撞中的確出現(xiàn)了多次“接觸-分離-再接觸”的微碰撞過程。
參 考 文 獻
[1] KLISCH T. Contact mechanics in multibody systems[J]. Multibody System Dynamics, 1999, 2(4):179-188.
[3] FLORES P, KOSHY C, LANKARANI H, et al. Numerical and experimental investigation on multibody systems with revolute clearance joints[J]. Nonlinear Dynamics, 2011, 65(4):383-398.
[4] WYRICK D A, ADAMS D F. Residual strength of a carbon/epoxy composite material subjected to repeated impact[J]. Journal of Composite Materials, 1988, 22(8):749-765.
[5] STOIANOVICI D, HURMUZLU Y. A critical study of the applicability of rigid-body collision theory[J]. Journal of Applied Mechanics, 1996, 63(2):247-248.
[6] NARABAYASHI T, SHIBAIKE K, ISHIZAKA A, et al. Effects of key parameters on energy distribution and kinetic characteristics in collision of bar and beam[J]. Journal of Sound & Vibration, 2007, 308(3):548-562.
[7] 王琪, 莊方方, 郭易圓,等. 非光滑多體系統(tǒng)動力學數(shù)值算法的研究進展[J]. 力學進展, 2013, 43(1):101-111.
WANG Qi, ZHUANG Fangfang, GUO Yiyuan, et al. Advances in the research on numerical methods for non-smooth dynamics of multibody systems[J]. Advances in Mechanics, 2013, 43(1):101-111.
[8] WANG J, LIU C, ZHAO Z. Nonsmooth dynamics of a 3D rigid body on a vibrating plate[J]. Multibody System Dynamics, 2014, 32(2):217-239.
[9] 高玉華. 剛體撞塊撞擊彈性長桿的二次撞擊分析[J]. 力學季刊, 1996(4):334-338.
GAO Yuhua. A prediction analysis of the second impact for an elastic bar impacting on a rigid block[J].Chinese Quarterly of Mechanics, 1996(4):334-338.
[10] 田阿利, 尹曉春. 自由飛行桿撞擊過程中的二次撞擊區(qū)[J]. 振動與沖擊, 2008, 27(1):19-24.
TIAN Ali, YIN Xiaochun.Secondimpactzonefora free-flying rodtoimpactaclampedone[J].Journal of Vibration and Shock, 2008, 27(1):19-24.
[11] 段玥晨, 章定國. 基于彈塑性接觸的柔性多體系統(tǒng)碰撞動力學[J]. 南京理工大學學報, 2012, 36(2):189-194.
DUAN Yuechen, ZHANG Dingguo.Flexible multibody system impact dynamics based on elastic-plastic contact[J]. Journal of Nanjing University of Science and Technology, 2012, 36(2):189-194.
[12] 劉錦陽, 洪嘉振. 閉環(huán)柔性多體系統(tǒng)的多點撞擊問題[J]. 中國機械工程, 2000, 11(6):619-623.
LIU Jinyang, HONG Jiazhen.Impact with multiple contact points of flexible multibodysystem with closed loops[J]. China Mechanical Engineering, 2000, 11(6):619-623.
[13] SEIFRIED R, SCHIEHLEN W, EBERHARD P. The role of the coefficient of restitution on impact problems in multibody dynamics[J]. Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, 2010, 1(K3):1-28.
[14] WEYLER R, OLIVER J, SAIN T, et al. On the contact domain method: a comparison of penalty and Lagrange multiplier implementations[J]. Computer Methods in Applied Mechanics & Engineering, 2012, 205(1):68-82.
[15] 王檢耀, 洪嘉振, 劉鑄永. 接觸碰撞動力學的多變量選取方法[J]. 力學學報, 2014, 46(2):318-322.
WANG Jianyao, HONG Jiazhen, LIU Zhuyong.Multi-variable selection method in contact/impact dynamics[J]. Chinese Journal of Theoretical and Applied Mechanics, 2014, 46(2):318-322.
猜你喜歡
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學學報(2019年6期)2019-08-13 07:04:32
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
