基于動(dòng)態(tài)時(shí)間彎曲的軌道波形匹配方法
2018-06-23 02:54:58朱洪濤南昌大學(xué)機(jī)電工程學(xué)院南昌330031
振動(dòng)與沖擊 2018年11期
關(guān)鍵詞:測量
朱洪濤, 李 姍, 肖 勇, 魏 暉(南昌大學(xué) 機(jī)電工程學(xué)院,南昌 330031)
軌道平直度測量儀(簡稱平直尺)利用激光測距原理,可實(shí)時(shí)將所測軌道波形以數(shù)據(jù)的形式反映出來。目前市場上生產(chǎn)的平直尺,在實(shí)際工程上主要有兩方面的應(yīng)用:一方面是為了測量鋼軌的焊縫,以此來評(píng)價(jià)鋼軌焊縫的焊接質(zhì)量[1];另一方面是為了分析軌道表面的短波不平順,對(duì)某段鋼軌的波形進(jìn)行處理和分析[2]。由于測量采用靜態(tài)測量方法[3],并且因測量裝置的限制,僅通過平直尺的單次測量難以滿足測量要求,故需要進(jìn)行多次測量,再利用匹配技術(shù)對(duì)數(shù)據(jù)進(jìn)行整合和分析,來客觀顯示軌道上的短波變化規(guī)律。
目前在軌道短波的匹配研究中,Kong等[4]采用動(dòng)態(tài)規(guī)劃(DP)算法,對(duì)二維曲線進(jìn)行匹配,但未考慮曲線不完全匹配的情況;Ucoluk等[5]研究了曲線的自動(dòng)匹配問題,但在局部匹配中采用了窮舉法,這使匹配復(fù)雜度較高而匹配效率低下,并且沒有運(yùn)用到實(shí)際測量中進(jìn)行測試,缺乏說服力;余先川等[6]提出基于區(qū)域的匹配,該方法一般通過求解曲線相關(guān)系數(shù)來實(shí)現(xiàn),但計(jì)算量大,運(yùn)行時(shí)間較長;牛小兵等[7]提出了基于特征的匹配方法,可以提取有縮放、平移和旋轉(zhuǎn)不變性的特征點(diǎn),具有快速、準(zhǔn)確的特點(diǎn),但如果特征點(diǎn)的提取不好,則會(huì)產(chǎn)生較大的誤差,嚴(yán)重影響匹配效果。以上這些傳統(tǒng)匹配算法只能對(duì)坐標(biāo)系內(nèi)的曲線進(jìn)行剛性的變換和匹配,無法解決不同坐標(biāo)系下曲線的動(dòng)態(tài)匹配問題。
本文利用二維坐標(biāo)轉(zhuǎn)換公式,將待匹配曲線經(jīng)旋轉(zhuǎn)和平移后,統(tǒng)一到同一坐標(biāo)系下。基于此,提出了一種基于動(dòng)態(tài)時(shí)間彎曲(DTW)的軌道短波匹配方法,通過對(duì)橫坐標(biāo)時(shí)間軸的彎曲和變形,發(fā)現(xiàn)相似波形并構(gòu)造累積代價(jià)矩陣;利用遞歸思想,可計(jì)算兩條曲線的最短彎曲路徑,并求出兩條待匹配曲線之間的單點(diǎn)對(duì)應(yīng)關(guān)系,以此來進(jìn)行精準(zhǔn)的點(diǎn)對(duì)點(diǎn)匹配,從而實(shí)現(xiàn)了軌道短波的精準(zhǔn)動(dòng)態(tài)匹配。
1 系統(tǒng)的構(gòu)成及測量原理
1.1 系統(tǒng)的構(gòu)成
測量系統(tǒng)主要由激光位移傳感器、編碼器、接近開關(guān)、步進(jìn)電機(jī)、步進(jìn)電機(jī)驅(qū)動(dòng)器、STC單片機(jī)及上位機(jī)組成,測量系統(tǒng)的結(jié)構(gòu)圖如圖1所示。
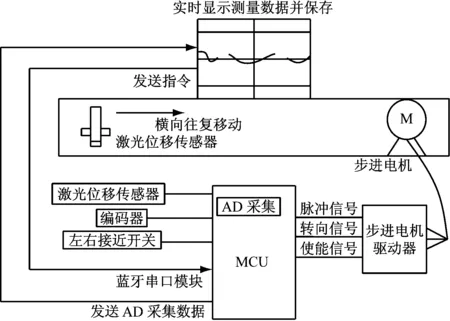
圖1 測量系統(tǒng)結(jié)構(gòu)圖Fig.1 Structure diagram of measuring system
1.2 系統(tǒng)測量原理
設(shè)定激光傳感器在導(dǎo)軌上運(yùn)動(dòng)一次時(shí),所采集的數(shù)據(jù)點(diǎn)為N個(gè)。將第一點(diǎn)的測量值y0作為參考點(diǎn),激光器向后測量的N-1個(gè)點(diǎn)y1至yN-1中,利用第一點(diǎn)的測量值y0依次減去其他被測點(diǎn)yi(i=1,2,…,N-1),則可求出兩點(diǎn)之間的相對(duì)距離y,即
y=y0-yi(i=1,2,…,N-1)
(1)
通過獲取傳感器探頭與被測軌面之間的距離,可以間接表示出所測鋼軌的表面形狀曲線。測量原理圖如圖2所示。
2 匹配前的坐標(biāo)轉(zhuǎn)換
在實(shí)際測量過程中,由于受軌道原始形狀的影響,每次測量的數(shù)據(jù)是在不同坐標(biāo)系下完成的,如圖3所示。所以,為了進(jìn)一步對(duì)數(shù)據(jù)進(jìn)行匹配,首先需要將數(shù)據(jù)進(jìn)行坐標(biāo)系的轉(zhuǎn)換,將所測數(shù)據(jù)統(tǒng)一在同一坐標(biāo)系下。
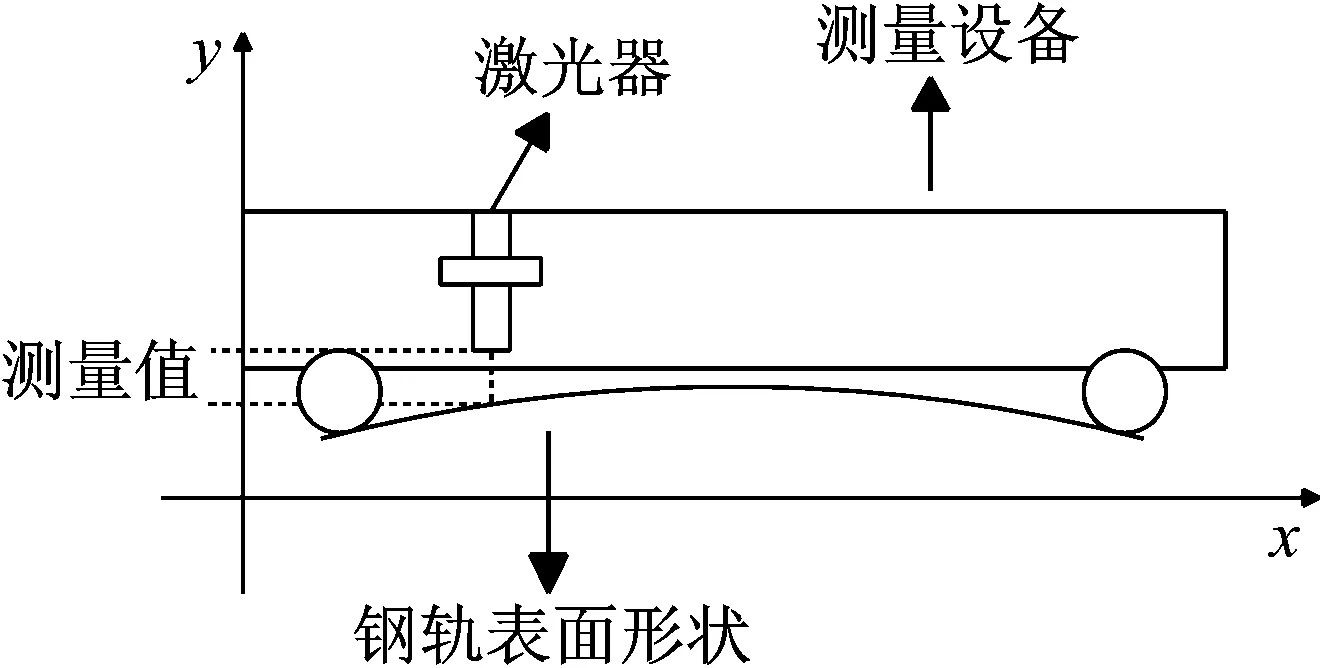
圖2 測量系統(tǒng)原理圖(mm)Fig.2 Schematic diagram of measuring system(mm)
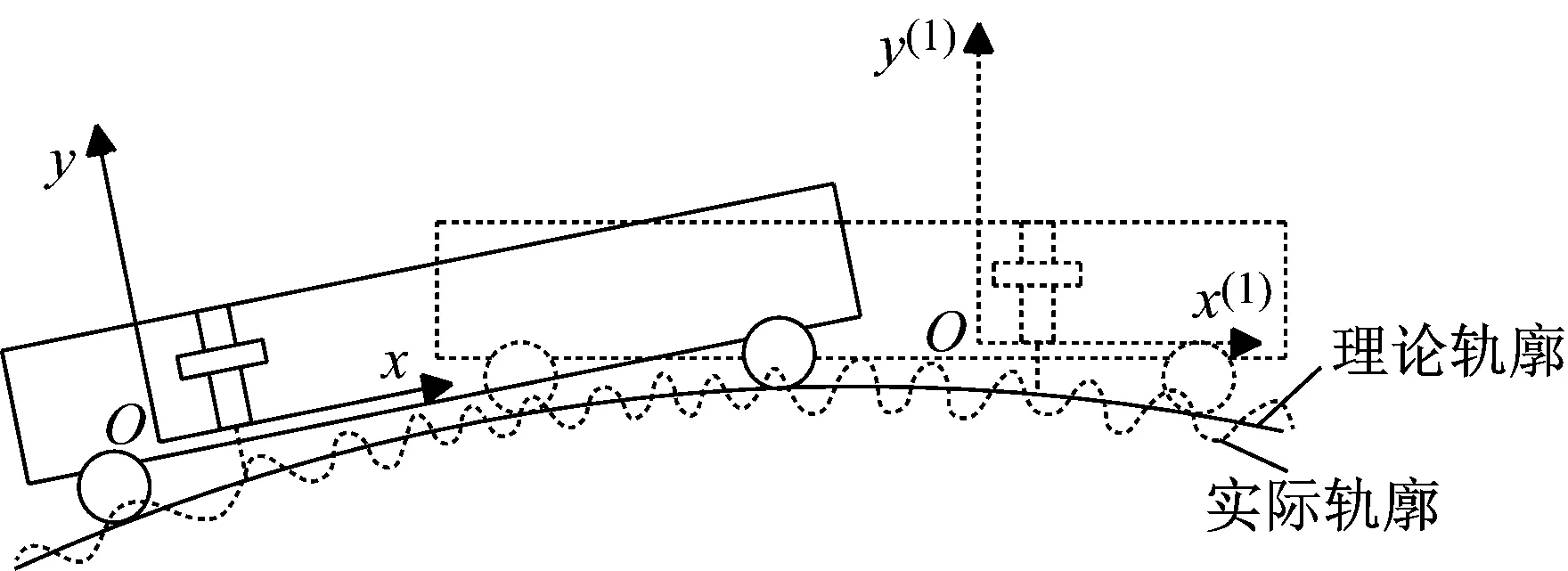
圖3 實(shí)際測量坐標(biāo)圖Fig.3 Practical measurement coordinate diagram
設(shè){o;x,y}和{o;x(1),y(1)}為測量平面的兩組坐標(biāo)系,橫坐標(biāo)表示測量里程,縱坐標(biāo)為軌道短波不平順值。對(duì)于軌道表面的同一測量點(diǎn)a,在不同位置下的測量值因坐標(biāo)系的不同而不同。如圖4所示,坐標(biāo)系{o;x(1),y(1)}相對(duì)于坐標(biāo)系{o;x,y}平移了(x0,y0),且逆時(shí)針旋轉(zhuǎn)了角度θ,使得測量點(diǎn)a在{o;x,y}和{o;x(1),y(1)}兩坐標(biāo)系下的測量值分別為(x,y)和(x1,y1),為了將測量重復(fù)段內(nèi)的數(shù)據(jù)進(jìn)行匹配,須對(duì)坐標(biāo)系進(jìn)行統(tǒng)一和轉(zhuǎn)換。

圖4 不同坐標(biāo)系下的數(shù)值顯示Fig.4 Numerical display in different coordinates
坐標(biāo)轉(zhuǎn)換公式為
x=x1cosθ-y1sinθ+x0
y=x1sinθ+y1cosθ+y0
(2)
將式(2)轉(zhuǎn)化為矩陣表達(dá)式為
(3)


Ai-1=RiAi+Bi-1(i=1,2,…,n)
(4)
根據(jù)迭代思想,將其他i個(gè)坐標(biāo)系轉(zhuǎn)換到第一個(gè)坐標(biāo)系{o;x,y}的轉(zhuǎn)換表達(dá)式為
(5)
3 基于動(dòng)態(tài)時(shí)間彎曲的波形匹配算法
動(dòng)態(tài)時(shí)間彎曲(Dynamic Time Warping,DTW)算法由于具有很好的魯棒性,較高的匹配精度,通常應(yīng)用在語音識(shí)別等模式識(shí)別領(lǐng)域[8-9]。該算法通過對(duì)橫坐標(biāo)時(shí)間軸的扭曲和變換,發(fā)現(xiàn)相似波形,使其特征與參考模板進(jìn)行匹配[10]。由于實(shí)際測量過程中,每次測量方向和角度的變化以及人為或環(huán)境影響的偶然誤差存在,使所測重合部分的數(shù)據(jù)不會(huì)完全相同,測量曲線在匹配過程中會(huì)有一定的變形和偏差。故在匹配過程中,需要對(duì)待匹配曲線的橫坐標(biāo)進(jìn)行彎曲變形后,才能進(jìn)行高精度的動(dòng)態(tài)匹配。引入DTW算法,從而實(shí)現(xiàn)了軌道波形的精準(zhǔn)點(diǎn)對(duì)點(diǎn)匹配。
3.1 動(dòng)態(tài)時(shí)間彎曲算法原理
由測量原理可知,數(shù)據(jù)采集中的橫坐標(biāo)是每隔5 mm測一個(gè)點(diǎn),等距測量可以等效為等時(shí)間間隔測量,故可將橫軸的里程等價(jià)為時(shí)間來衡量。假設(shè)在第i個(gè)坐標(biāo)系{o;x(i),y(i)}內(nèi)的N個(gè)測量數(shù)據(jù)存放在時(shí)間序列P,在第i-1個(gè)坐標(biāo)系{o;x(i-1),y(i-1)}內(nèi)的M個(gè)數(shù)據(jù)存放在時(shí)間序列Q,那么
P=[p1,p2,p3,…,pn,…,pN]
Q=[q1,q2,q3,…,qm,…,qM]
定義距離函數(shù):dij=f(pi,qj)。
其中f表示實(shí)際采用的測距函數(shù),最常用的是二階距離[11],即:
(6)
由式(6)可知,根據(jù)時(shí)間序列P、Q內(nèi)不同數(shù)據(jù)對(duì)象之間點(diǎn)與點(diǎn)的歐氏距離,構(gòu)成了N×M的動(dòng)態(tài)時(shí)間扭曲距離矩陣d
在矩陣d中,相鄰矩陣元素的集合構(gòu)成了一條彎曲路徑,記為W={w1,w2,…,wk},其中W中的第k個(gè)元素wk=(dij)k。彎曲路徑需滿足以下條件[12-13]
(1)有界性:w1=d11,wk=dMN;
(2)連續(xù)性:若wk=(pa,qb),wk-1=(pa′,qb′),則有0≤|a-a′|≤1,0≤|b-b′|≤1;
(3)單調(diào)性:若wk=(pa,qb),wk-1=(pa′,qb′),則有a≥a′,b≥b′;
(4)邊界條件:彎曲路徑中的總元素?cái)?shù)k需滿足max(M,N)≤k≤M+N-1;
由彎曲路徑的必要條件可知,滿足上述條件的彎曲路徑不止一條,根據(jù)窮舉法,可以將所有的彎曲路徑一一列出。但時(shí)間序列P和Q的DTW距離指兩時(shí)間序列間的最短彎曲路徑Wbest[14]
(7)
其中K為消除時(shí)間序列長度不一的影響因子。
為求解式(7),由遞歸思想,構(gòu)造累積代價(jià)矩陣γ,即
(8)
式(8)中,i=1,2,…,N;j=1,2,……,M,γ(0,0)=0,γ(i,0)=γ(0,j)=+∞故時(shí)間序列P和Q的DTW距離為
DTW(P,Q)=γ(N,M)
(9)
3.2 數(shù)據(jù)匹配算法的實(shí)現(xiàn)
由平直尺的測量原理可知,前后兩次測量數(shù)據(jù)的時(shí)間序列P和Q中有一半數(shù)據(jù)是重復(fù)測量所得。若要將相似的時(shí)間序列Pi和Qj匹配,首先通過求解彎曲路徑曲線W的距離,找到經(jīng)過時(shí)間軸的彎曲和變形后兩個(gè)時(shí)間序列之間的最短彎曲路徑Wbest(即DTW距離),并在此過程中確定兩時(shí)間序列各點(diǎn)的最佳對(duì)應(yīng)關(guān)系。如圖5所示。

圖5 最短彎曲路徑下各點(diǎn)對(duì)應(yīng)關(guān)系Fig.5 One-to-one match in the shortest bending
由圖5中的最佳對(duì)應(yīng)關(guān)系確定的最佳彎曲路徑圖,如圖6所示。
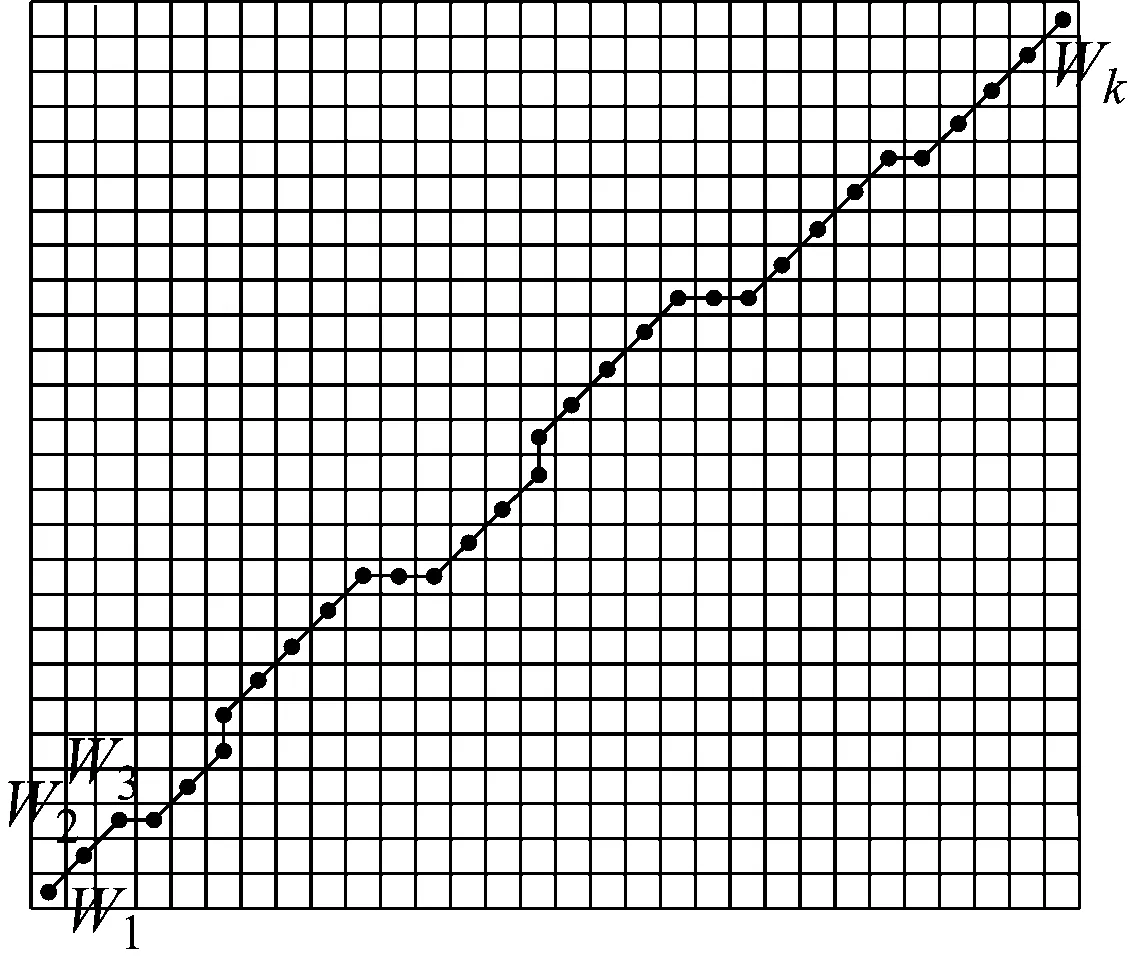
圖6 最佳彎曲路徑圖Fig.6 The optimum bending path diagram
對(duì)于最短彎曲路徑下的各點(diǎn)對(duì)應(yīng)關(guān)系,存在以下幾種情況[15]
①單點(diǎn)對(duì)應(yīng):Pi中的一個(gè)元素和Qj中的唯一元素相對(duì)應(yīng);
②多點(diǎn)對(duì)應(yīng):Pi中的一個(gè)元素和Qj中的多個(gè)元素相對(duì)應(yīng)或Qj中的一個(gè)元素和Pi中的多個(gè)元素相對(duì)應(yīng)。由彎曲路徑的必要條件可知,Qj和Pi中的多個(gè)元素在時(shí)間序列上是連續(xù)的。
對(duì)于單點(diǎn)對(duì)應(yīng)的情況,表明兩時(shí)間序列有唯一最優(yōu)解,兩點(diǎn)已匹配成功。現(xiàn)在假設(shè)



4 數(shù)據(jù)匹配實(shí)驗(yàn)及分析
4.1 數(shù)據(jù)匹配實(shí)驗(yàn)
對(duì)于前后兩次測量的數(shù)據(jù),首先經(jīng)過坐標(biāo)系的旋轉(zhuǎn)和平移,將數(shù)據(jù)統(tǒng)一到同一坐標(biāo)系下。為了保證后期匹配的高精度,則要判斷兩條曲線相似部分是否對(duì)齊,即是否完全統(tǒng)一在同一坐標(biāo)系下。構(gòu)造目標(biāo)函數(shù)H(x)
(10)
其中,y為標(biāo)準(zhǔn)坐標(biāo)系{o;x,y}下的函數(shù),y′為通過坐標(biāo)轉(zhuǎn)換后的函數(shù),n為測量曲線中的數(shù)據(jù)總量。旋轉(zhuǎn)和平移量在迭代過程中不斷變化,使目標(biāo)函數(shù)H(X)的值不斷變化,當(dāng)目標(biāo)函數(shù)H(X)值最小時(shí),則判定為兩條曲線相似部分對(duì)齊,此時(shí)的旋轉(zhuǎn)和平移量認(rèn)為最佳值。由實(shí)際測量可知,相鄰兩次測量的角度偏移量較小,雖然人為因素或環(huán)境因素引起的偶然誤差存在,但對(duì)后期的匹配影響不大,故旋轉(zhuǎn)和平移誤差有較好的魯棒性。
根據(jù)測量原理可確定相似波形段,利用動(dòng)態(tài)時(shí)間彎曲算法求解出相似波形段中的單點(diǎn)對(duì)應(yīng)關(guān)系,進(jìn)而對(duì)數(shù)據(jù)進(jìn)行匹配和處理。匹配流程圖如圖7所示。

圖7 短波匹配流程圖Fig.7 Shortwave matching flow chart
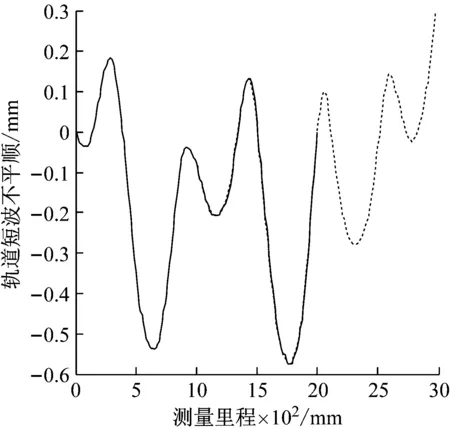
匹配后的圖像如圖8所示。

圖8 軌道波形匹配圖Fig.8 Rail shortwave matching diagram
4.2 匹配算法的比較與評(píng)價(jià)
由動(dòng)態(tài)時(shí)間彎曲算法原理及實(shí)現(xiàn)過程可知,最短彎曲路徑下所對(duì)應(yīng)的DTW值,間接反映了兩條曲線的相似度即匹配的好壞。兩曲線匹配的越好,其相似度越高,最短彎曲路徑越短,對(duì)應(yīng)的DTW數(shù)值越小;兩曲線匹配越差,匹配曲線越不相似,最短彎曲路徑越長,對(duì)應(yīng)的DTW值也越大。理想情況下,兩條匹配曲線完全匹配時(shí)求解的最短彎曲路徑為0,即DTW值為0。
由文獻(xiàn)[16-17]可知,傳統(tǒng)匹配方法中常用的方法是基于區(qū)域的數(shù)據(jù)匹配,該算法通過求解曲線相關(guān)系數(shù)來實(shí)現(xiàn)。本文以傳統(tǒng)匹配算法中的基于區(qū)域的匹配算法為代表,比較動(dòng)態(tài)時(shí)間彎曲算法與傳統(tǒng)匹配方法的匹配精度問題。對(duì)同一測量數(shù)據(jù)分別利用傳統(tǒng)匹配算法和動(dòng)態(tài)時(shí)間彎曲算法匹配,匹配圖像如圖9所示。

(a) 基于區(qū)域的傳統(tǒng)算法匹配
(b) 動(dòng)態(tài)時(shí)間彎曲算法匹配圖9 兩種算法的波形匹配圖Fig.9 Waveforms mosaic based on two algorithms
通過DTW距離計(jì)算式(7)~(9)可知,圖9(a)的DTW值為0.012 4,圖9(b)的DTW值為0.003 3。
利用平直尺對(duì)某段鋼軌進(jìn)行測量。為了不失一般性,在所測60組數(shù)據(jù)中分別利用傳統(tǒng)匹配算法和動(dòng)態(tài)時(shí)間彎曲算法進(jìn)行曲線匹配,并求解匹配后所對(duì)應(yīng)的DTW值。兩種算法的DTW值如圖10所示。
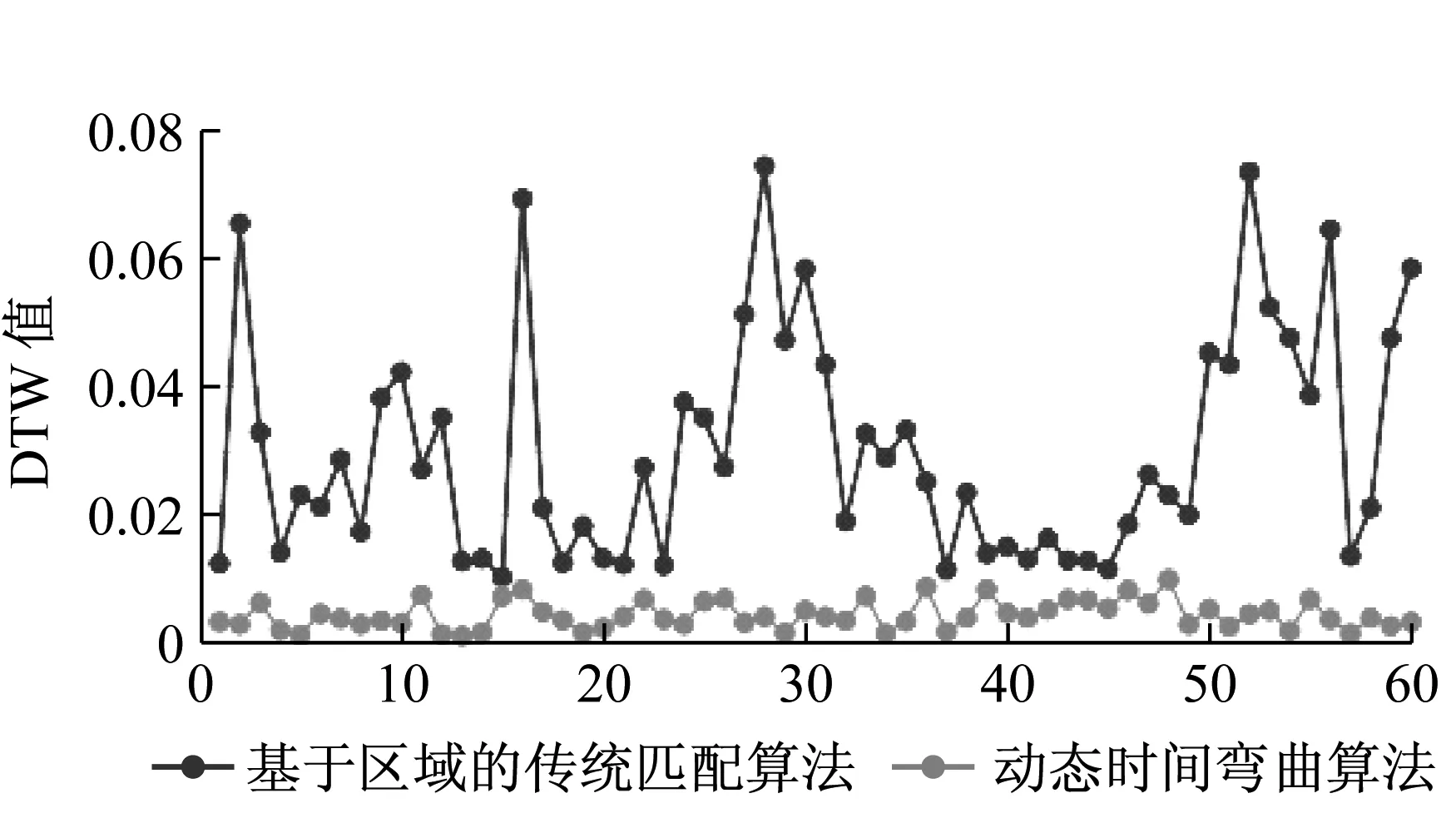
圖10 兩種算法的DTW值Fig.10 The value of DTW by using two algorithms
對(duì)以上60組數(shù)據(jù)進(jìn)行數(shù)據(jù)統(tǒng)計(jì)分析,可求出兩種算法下的DTW均值;對(duì)數(shù)據(jù)標(biāo)準(zhǔn)化處理后,可通過標(biāo)準(zhǔn)差的大小反映兩種算法的穩(wěn)定性[18],如表1所示。
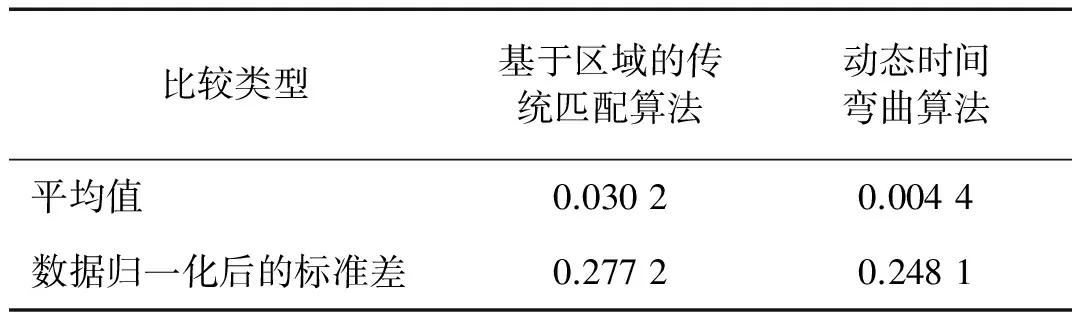
表1 兩種匹配算法的數(shù)值統(tǒng)計(jì)Tab.1 Numerical statistics by using two algorithms
由表1可知,通過傳統(tǒng)算法匹配所求得的DTW均值為0.030 2,約是動(dòng)態(tài)時(shí)間彎曲算法匹配所得DTW均值(0.004 4)的10倍,即通過動(dòng)態(tài)時(shí)間彎曲算法進(jìn)行的數(shù)據(jù)匹配,匹配精度比基于區(qū)域的傳統(tǒng)匹配算法的匹配精度提高約10倍,匹配效果比傳統(tǒng)匹配算法好。并且,將兩組數(shù)據(jù)標(biāo)準(zhǔn)化處理后所求得的標(biāo)準(zhǔn)差表明,利用動(dòng)態(tài)時(shí)間彎曲算法進(jìn)行的數(shù)據(jù)匹配,匹配穩(wěn)定性較好,沒有出現(xiàn)誤差較大的情況。
5 結(jié) 論
本文基于動(dòng)態(tài)時(shí)間彎曲算法對(duì)軌道波形進(jìn)行匹配,通過構(gòu)造累積代價(jià)矩陣,利用遞歸思想,可計(jì)算兩條曲線的最短彎曲路徑,并求出兩條待匹配曲線之間的單點(diǎn)對(duì)應(yīng)關(guān)系,從而進(jìn)行數(shù)據(jù)點(diǎn)與點(diǎn)之間的精準(zhǔn)動(dòng)態(tài)匹配。將傳統(tǒng)匹配中基于區(qū)域的匹配算法與動(dòng)態(tài)時(shí)間彎曲算法作比較,實(shí)驗(yàn)結(jié)果表明:
(1)基于動(dòng)態(tài)時(shí)間彎曲的匹配方法,解決了傳統(tǒng)匹配方法中剛性匹配的問題。通過對(duì)橫坐標(biāo)軸的彎曲變形,可找到待匹配曲線的最佳匹配關(guān)系,實(shí)現(xiàn)精準(zhǔn)的動(dòng)態(tài)匹配。
(2)基于動(dòng)態(tài)時(shí)間彎曲的匹配精度比傳統(tǒng)匹配算法高約10倍,能較好的對(duì)測量數(shù)據(jù)進(jìn)行匹配。
(3)基于動(dòng)態(tài)時(shí)間彎曲算法下的DTW值標(biāo)準(zhǔn)差為0.248 1,比基于區(qū)域的傳統(tǒng)匹配方法標(biāo)準(zhǔn)差小,故基于動(dòng)態(tài)時(shí)間彎曲算法的匹配穩(wěn)定性較好,可信度較高。
(4)本算法還可以運(yùn)用在測量數(shù)據(jù)的重復(fù)性分析、鋼軌輪廓匹配、測量曲線相似比較等方面。
參 考 文 獻(xiàn)
[1] 程小紅. 鋼軌焊接接頭平直度檢測儀研制[D]. 成都: 西南交通大學(xué),2010.
[2] YAN Ziquan, GU Aijun, LIU Weining, et al. Effects of wheelset vibration on initiation and evolution of rail short-pitch corrugation[J]. Journal of Central South University,2012(9):2681-2688.
[3] JELALI M.Performance assessment of control systems in rolling mills-application to strip thick thickness and flatness control[J]. Journal of Process Control, 2007,17:805-816.
[4] KONG W,KIMIA B B. On solving 2D and 3D puzzles using curve matching[C]∥Proceedings of the CVPR.Hawaii, USA,2001.
[5] UCOLUK G, TOROSLUL H. Automatic reconstruction of broken 3-D surface objects[J]. Computers and Graphics, 1999, 23(4):573-582.
[6] 余先川,呂中華,胡丹.遙感圖像配準(zhǔn)技術(shù)綜述[J]. 光學(xué)精密工程,2013(11):2960-2972.
YU Xianchuan,Lü Zhonghua,HU Dan.Reviwe of remote sensing image registration techniques[J].Optics and Precision Engineering, 2013(11):2960-2972.
[7] 牛小兵,林玉池,趙美蓉,等.基于特征的二維圖像匹配法測量幾何量[J].天津大學(xué)學(xué)報(bào),2001(3):396-339.
NIU Xiaobing,LIN Yuchi,ZHAO Meirong, et al.Measurement of geometric parameters based on feature based image mosaic method[J].Journal of TianJin University,2001(3):396-399.
[8] 肖輝,胡運(yùn)發(fā). 基于分段時(shí)間彎曲距離的時(shí)間序列挖掘[J]. 計(jì)算機(jī)研究與發(fā)展,2005(1):72-78.
XIAO Hui,HU Yunfa.Data mining based on segmented time warping distance in time series database[J].Journal of Computer Research and Development,2005(1):72-78.
[9] 李正欣,張鳳鳴,李克武,等. 一種支持DTW距離的多元時(shí)間序列索引結(jié)構(gòu)[J]. 軟件學(xué)報(bào),2014(3):560-575.
LI Zhengxin,ZHANG Fengming,LI Kewu, et al.Index structure for multivariate time series under DTW distance metric[J].Journal of Software,2014(3):560-575.
[10] 鄒朋成,王建東,楊國慶,等. 輔助信息自動(dòng)生成的時(shí)間序列距離度量學(xué)習(xí)[J]. 軟件學(xué)報(bào),2013(11):2642-2655.
ZOU Pengcheng,WANG Jiandong,YANG Guoqing, et al. Distance metric learning based on side information autogeneration for time series[J]. Journal of Software,2013(11):2642-2655.
[11] 楊靖. 基于動(dòng)態(tài)時(shí)間彎曲的時(shí)間序列相似性搜索技術(shù)的研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2013.
[12] 鄒朋成,王建東,楊國慶,等. 輔助信息自動(dòng)生成的時(shí)間序列距離度量學(xué)習(xí)[J]. 軟件學(xué)報(bào),2013(11):2642-2655.
ZOU Pengcheng,WANG Jiandong,YANG Guoqing, et al.Distance metric learning based on side information autogeneration for time series[J].Journal of Software,2013(11):2642-2655.
[13] PREKOPCSAK Z,LEMIRE D. Time series classification by class-specific Mahalanobis distance measures[J]. Advances in Data Analysis and Classification, 2012,6(3):185-200.
[14] GHAREHBAGHI A, ASK P, BABIC A. A pattern recognition framework for detecting dynamic changes on cyclic time series[J]. Pattern Recognition, 2015, 48(3):696-708.
[15] 杜永峰,李萬潤,李慧,等. 基于時(shí)間序列分析的結(jié)構(gòu)損傷識(shí)別[J].振動(dòng)與沖擊,2012,31(12):108-111.
DU Yongfeng,LI Wanrun,LI Hui, et al. Structural damage identification based on time series analysis[J]. Journal of Vibration and Shock,2012,31(12):108-111.
[16] 嚴(yán)大勤,孫鑫. 一種基于區(qū)域匹配的圖像匹配算法[J]. 儀器儀表學(xué)報(bào),2006(增刊1):749-750.
YAN Daqin,SUN Xin.Image mosaics algorithm based on area matching[J].Chinese Journal of Scientific Instrument,2006(Sup1):749-750.
[17] 顧費(fèi)勇. 基于圖像的自適應(yīng)圖像匹配算法研究[D].杭州:浙江大學(xué),2008.
[18] 蔣瑜,陶俊勇,王得志,等. 一種新的非高斯隨機(jī)振動(dòng)數(shù)值模擬方法[J]. 振動(dòng)與沖擊,2012,31(19):169-173.
JIANG Yu,TAO Junyong,WANG Dezhi, et al. A novel approach for numerical simulation of a non-Gaussian random vibration[J].Journal of Vibration and Shock,2012,31(19):169-173.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00
