基于頻響函數法的固定結合部參數辨識研究
2018-06-25 02:44:56田豐慶朱堅民李孝茹上海理工大學機械工程學院上海200093
振動與沖擊 2018年11期
田豐慶, 朱堅民, 李孝茹, 李 堯(上海理工大學 機械工程學院,上海 200093)
機械結構中存在著大量的固定連接,如栓接、鉚接、焊接、粘接等,固定結合部的存在增加了整體結構的阻尼,減小了整體結構的剛度,使整體結構的動態特性變差。因此準確地辨識結合部參數對確定整體結構的動態特性具有重要意義。
固定結合部等效參數的辨識方法主要有模態分析法與頻響函數法[1]。模態分析法的基本思想是將機械結構的動力學方程變換到模態坐標空間,并截去部分高階模態后確定結合部的數學模型[2]。該方法的特點是需要準確確定整體結構的模態參數,對于整體結構模態相對密集的對象難以應用。頻響函數法的基本思想是根據機械結構中子結構之間的連接關系,耦合各子結構的頻響函數確定整體結構的頻響函數,再對結合部參數進行辨識。頻響函數法原理簡單、實驗方便、應用廣泛。

針對上述問題,本文以螺栓連接的兩個金屬梁的栓接結合部為例進行研究,采用頻響函數法建立其動力學模型,提出對結合部中各參數項單獨靈敏度分析、單獨辨識的方法。通過仿真與實驗算例驗證該方法的正確性。
1 基本原理
1.1 頻響函數法辨識固定結合部參數的基本原理
機械結構通常可以拆分為子結構與連接子結構的結合部,如圖1所示,整體結構W拆分為子結構A、B和結合部J。其中e1、e2表示結合部部分,a、b表示結合部以外部分。根據子結構A、子結構B以及整體結構W頻響函數的定義,可得位移與外力的關系式,如式(1)~(3)所示。式中X表示結構的位移矢量,F表示結構的力矢量,H表示頻響函數。下標A、B表示對應的子結構,W表示整體結構。下標a、b、e1、e2表示頻響函數對應的激勵點、響應點,如Hae1表示在e1點激勵 a點響應的頻響函數。上標有*代表此項參數為整體結構的參數,上標無*代表此項參數為子結構的參數。
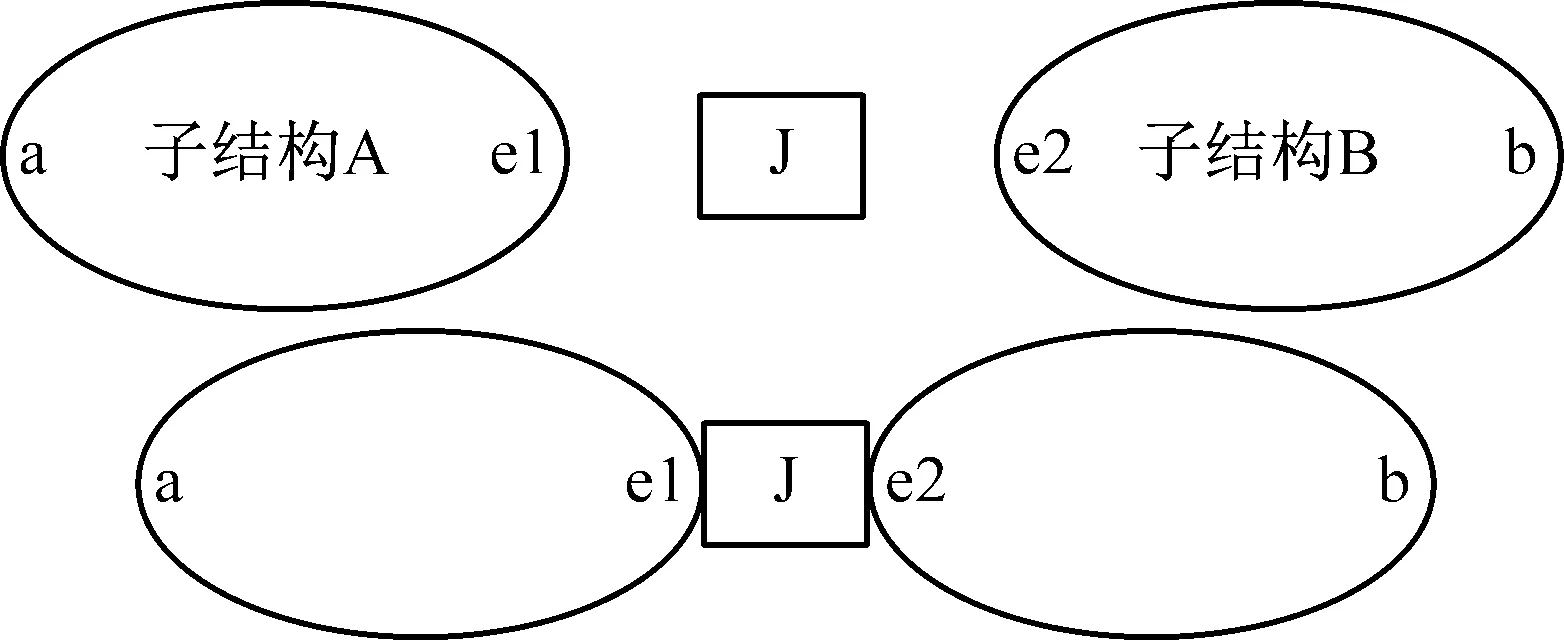
圖1 子結構與整體結構關系示意圖Fig.1 Relationship between substructure and assembly structure
(1)

(2)

(3)
假設結合部不受外力,則結合部之間的力為作用力與反作用力,如式(4)所示。由于結合部的頻響函數HJ與等效阻抗ZJ互逆,可得式(5)。忽略結合部的質量,結合部的動力學公式可以表示為式(6)
Fe1=-Fe2
(4)

(5)
Xe2-Xe1=HJFe1
(6)
聯合式(1)~(6),可得整體結構的原點、跨點頻響函數如式(7)~(10)所示
(7)

(8)

(9)

(10)
由式(7)~(10)可以推導出相應的4個結合部參數的辨識公式,如式(11)~式(14)。這4個辨識公式分為兩組,式(11)與式(14)為第一組,式(12)與式(13)為第二組。第一組的兩個公式都采用整體結構的原點頻響函數作參數,只是對應整體結構的原點不同。因此將第一組的兩個公式等效為一個辨識公式如式(11)。第二組與第一組情況相似,不同的是第二組公式采用了整體結構的跨點頻響函數,可將第二組公式等效為式(12)所示的辨識公式
(11)

(12)

(13)
(14)
根據上述公式辨識結合部參數需要先求取公式中的頻響函數。以式(11)中的頻響函數He1a為例說明,如果a、e1兩節點都只有一個自由度,則He1a意義明確,代表一個頻響函數。如果a、e1兩節點都有兩個自由度,如歐拉梁模型,則He1a代表4個頻響函數組成的頻響函數矩陣。分別為平移振動的頻響函數(平動頻響函數)、扭轉振動的頻響函數(轉動頻響函數)、平移與扭轉振動耦合的頻響函數(耦合頻響函數)。
對子結構而言,根據有限元理論建立子結構的有限元模型,可以計算其所有頻響函數(包括平動、轉動及耦合頻響函數)。對整體結構而言,由于結合部參數未知,無法構建整體結構的有限元模型,需用實驗方法得到所有頻響函數。其中平動頻響函數可以通過實驗測得,但轉動與耦合頻響函數需專門的測量設備[17]。本文采用有限差分法[18]通過兩點分別激勵,并測量其響應的平動頻響函數后再計算出其中一點的所有頻響函數。
1.2 有限差分法計算轉動頻響函數
以梁結構為模型說明轉動頻響函數的求法,計算如圖2中B點激勵B點響應的所有頻響函數。在B點附近設置A點,分別激勵A點、B點,并且在A點、B點測試響應信號,可得平動頻響函數HAA_tt、HAB_tt、HBA_tt、HBB_tt,組成矩陣如式(15),其中字母tt表示平動頻響函數。
設A、B兩點之間的距離為s,確定前向差分公式如式(16)所示。由式(17)可以計算出B點激勵B點響應的所有頻響函數。字母rr表示轉動頻響函數,字母tr、rt表示耦合頻響函數。

圖2 有限差分法求B點頻響函數Fig.2 Finite difference method for FRFs of point B
(15)

(16)

(17)
1.3 結合部參數單獨辨識原理
由辨識公式(11)、(12)可知,如果辨識公式中子結構和整體結構的頻響函數可以確定,則結合部的參數可以通過兩個辨識公式中任意一個計算得到。從理論上講,對應于每個頻率都可計算出一組結合部參數,并且計算結果應該相等。但事實并非如此,計算的結果不相同甚至部分結果相差較大。如何找出相對誤差較小的結合部參數所對應的辨識頻段是準確辨識結合部參數的關鍵。
本文方法的主要思路是:通過僅改變結合部參數中某一項參數的大小得到幾組新參數,如以2倍、1倍與0.5倍參數為例的三組參數。用該三組參數模擬結合部對整體結構進行模態分析,對比三組參數分析得出的固有頻率值,得到該參數由0.5倍變至2倍時引起的每一階固有頻率的相對變化量,用相對誤差表示,相對誤差越大,表示該參數對此階固有頻率值的影響越大,則該參數在此階固有頻率處的靈敏度越高。根據李玲等的研究,在靈敏度高的頻段可以準確地辨識出結合部參數。本文采用上述方法確定某一結合部參數的靈敏模態,并在該模態處辨識參數,并依此方法辨識出所有的結合部參數。
2 仿真算例研究
2.1 集中質量模型
集中質量法在機械結構結合部參數建模中應用廣泛,在集中質量模型中結合部多數采用線性彈簧阻尼單元模擬。本文首先以集中質量模型為例進行研究,構建集中質量模型如圖3所示,整體結構W拆分為子結構A、子結構B及結合部J。結合部采用一組彈簧阻尼單元模擬,用ZJ表示結合部等效阻抗,kJ和cJ分別表示結合部的剛度和阻尼,建立其等效模型,如式(18)所示。
Model 1ZJ=kJ+iwcJ
(18)

圖3 集中質量模型Fig.3 Lumped mass model
集中質量模型中的參數如表1所示。利用有限元理論可計算子結構A、B的頻響函數。
構建整體結構的有限元模型,可求得整體結構前4階的固有頻率分別為228 Hz、449 Hz、781 Hz、853 Hz。
根據1.3節的分析,用3組kJ的不同倍數的結合部參數kJ+iwcJ、2×kJ+iwcJ及0.5×kJ+iwcJ分別模擬結合部并進行模態分析,將計算出的3條頻響函數曲線繪制在圖5中,同時將對應的整體結構固有頻率值列于表2。對每一階模態,用0.5kJ與2kJ作為結合部參數對應的固有頻率的差值除以kJ作為結合部參數對應的固有頻率值,得此kJ由0.5倍~2倍的變化量下所引起的這一階固有頻率值的變化率,用相對誤差表示,見表2。

表1 集中質量模型參數表Tab.1 Parameters of the lumped mass model
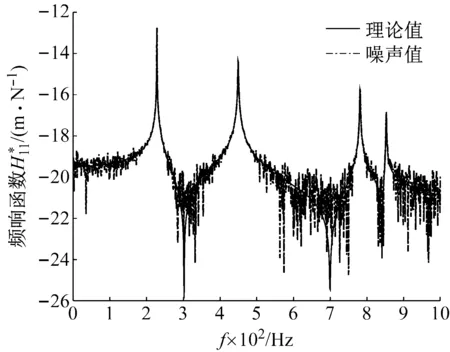
圖4 頻響函數的理論值與噪聲值Fig.4 Theoretical and noisy value of

表2 kJ靈敏度分析表Tab.2 Sensitivity analysis of kJ

圖5 對kJ靈敏度分析Fig.5 Sensitivity analysis of kJ
由表2和圖5可知,剛度kJ在整體結構前4階模態處的靈敏度不相同。在第1階、第3階模態處,不同倍數的kJ對應的固有頻率值變化較小,在這兩階模態處不靈敏。在第2階、第4階模態處,從圖5看出固有頻率值有較大變化,由相對誤差的數值分析可知,kJ的大小變化在第2階模態引起的誤差最大,達到10.2%,因此剛度kJ在整體結構的第2階模態處靈敏度最高。則本算例中剛度kJ在第2階固有頻率(449 Hz)處辨識。
圖6為根據式(11)辨識的kJ值,由圖6可知在每個頻率處所計算出的結合部參數值并不相等,有些與理論值之間還有較大的誤差,但在參數kJ最靈敏的模態頻率(449 Hz)附近,計算值與理論值比較接近。圖7表示的是結合部阻尼參數cJ的辨識情況,其辨識方法與剛度參數的辨識方法相同。
采用式(12)辨識參數的方法與式(11)的辨識方法相同,兩者的辨識結果列于表3。
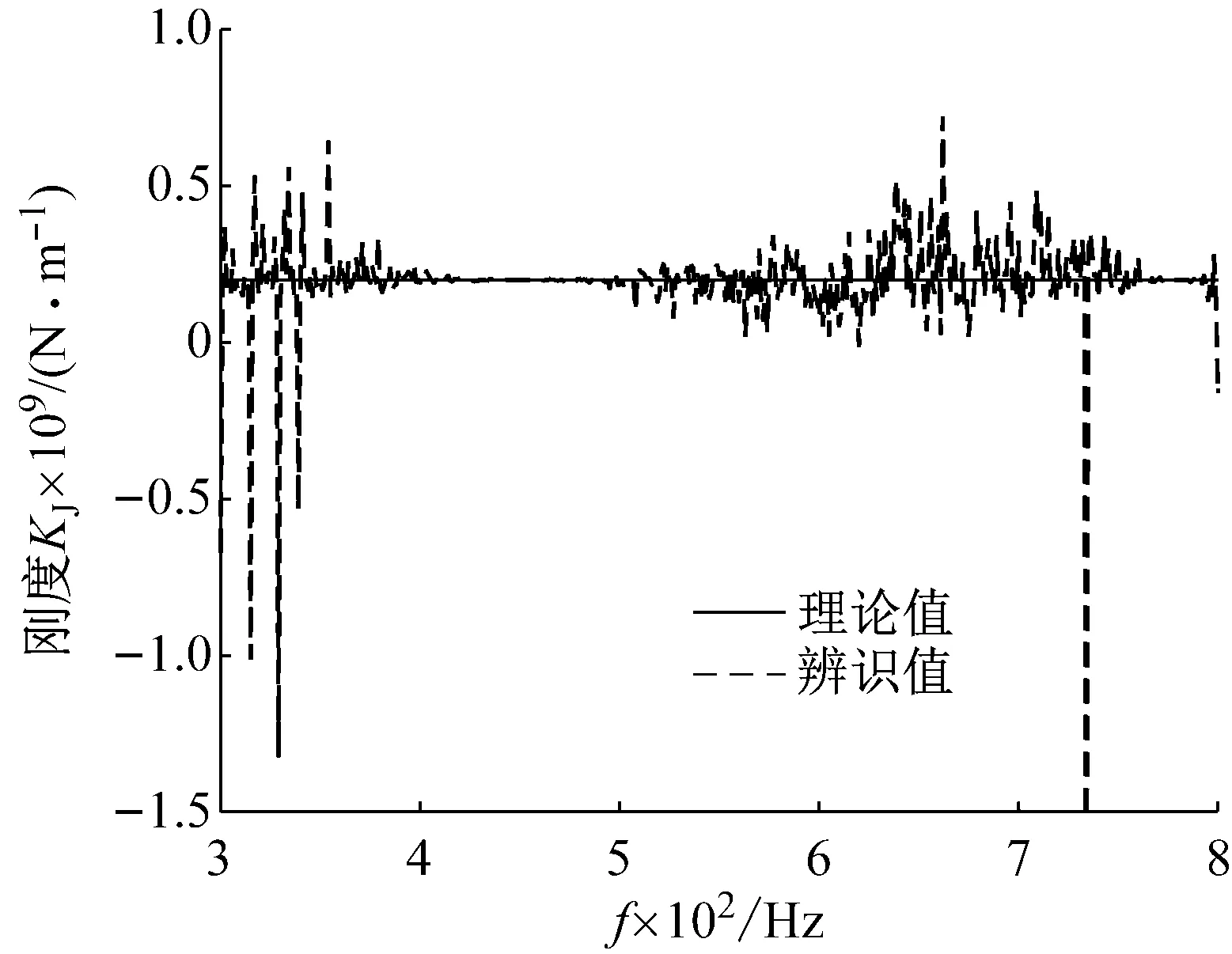
圖6 式(11)的計算出的kJ值Fig.6 The values of kJ calculated by formula (11)

圖7 式(11)計算出的cJ值Fig.7 The values of cJ calculated by formula (11)
由表3可知,式(11)和式(12)的辨識結果差異較小,式(11)的辨識精度略高。這主要是由于辨識公式(11)中采用整體結構的原點頻響函數作為參數,辨識公式(12)中采用整體結構的跨點頻響函數作為參數。對比這兩種頻響函數,原點頻響函數的精度比跨點頻響函數略高,這與文獻[14]的結論一致。
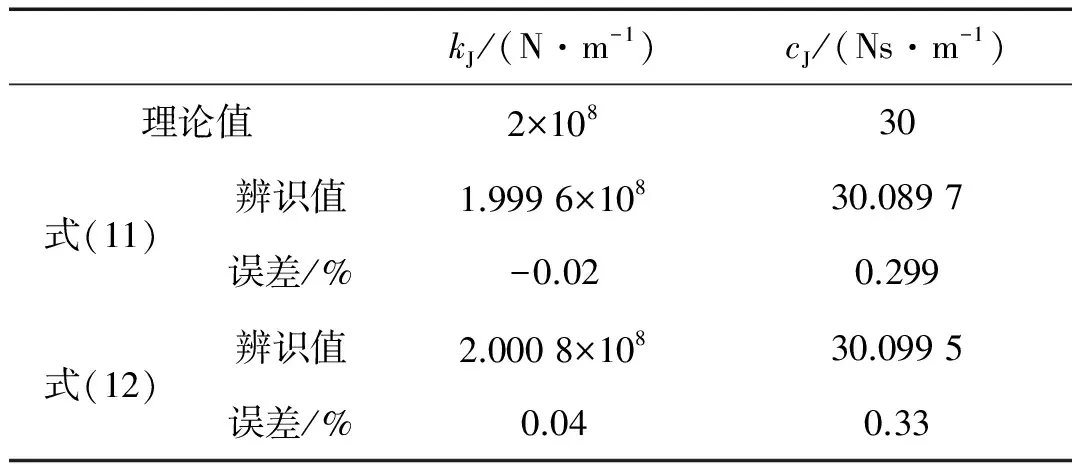
表3 集中質量模型結合部參數辨識結果Tabl.3 Parameter identification result of thejoint in lumped mass model
當結合部等效為單自由度彈簧阻尼單元時,式(11)和式(12)的辨識結果差異較小,具體應用時可根據實際情況中容易獲得的頻響函數選擇合適的辨識公式。
2.2 歐拉梁模型
如圖8所示的兩個子結構是兩端自由的歐拉梁,e1與e2固定連接組成整體結構。結合部采用2節點4自由度的剛度矩陣模擬,建立結合部的等效模型如式(19)所示。式中ZJ表示結合部等效阻抗,ktt表示平動剛度,krr表示轉動剛度,ktr和krt示耦合剛度,c表示對應的阻尼,w表示角頻率。則辨識公式(11)、(12)中的頻響函數為平動、轉動、耦合頻響函數組成的矩陣。
(19)

圖8 歐拉梁模型Fig.8 Euler-Bernoulli beam model
梁的彈性模量為1.97×1011Pa,密度為7 865 kg/m3,根據有限元理論可計算出子結構A、B的所有頻響函數。
基于表4中的結合部參數,建立整體結構的有限元模型,其中耦合參數ktr和krt相等,ctr和crt相等。可得整體結構在0~1 000 Hz以內有四階固有頻率,分別為87 Hz、249 Hz、466 Hz、794 Hz。采用前述靈敏度分析方法,對結合部參數ktt、krt(ktr)和krr分別進行靈敏度分析,分析結果如圖9~11所示。
由圖9可知,平動剛度ktt在整體結構第1、2、3階模態處不靈敏,在第4階模態處最靈敏;由圖11可知,轉動剛度krr在整體結構第1、2、4階模態處不靈敏,在第3階模態處最靈敏;由圖10可知耦合剛度ktr在所考慮的頻段都不靈敏。


圖9 對ktt的靈敏度分析Fig.9 Sensitivity analysis of ktt
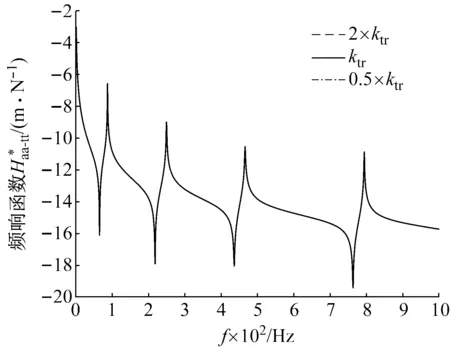
圖10 對ktr的靈敏度分析Fig.10 Sensitivity analysis of ktr

圖11 對krr的靈敏度分析Fig.11 Sensitivity analysis of krr
表4 結合部參數表Tab.4 Parameters of the joint

圖12 式(11)計算出的ktt值Fig.12 ktt calculated by formula (11)

圖13 式(11)計算出的ktr值Fig.13 ktr calculated by formula (11)
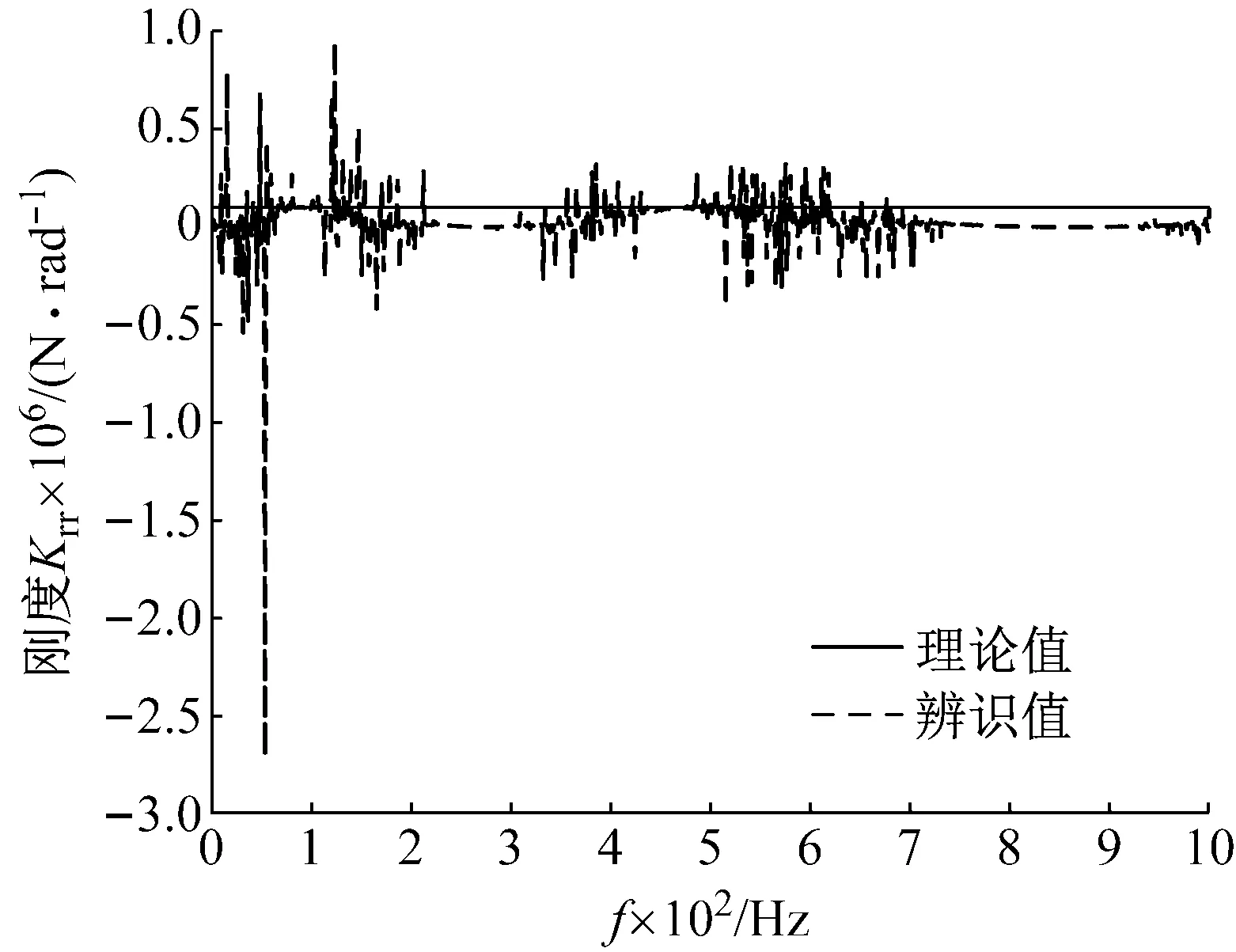
圖14 式(11)計算出的krr值Fig.14 krr calculated by formula (11)
由表5可知,與集中質量模型的算例結果類似,采用式(11)辨識結果的誤差比式(12)的誤差小。
耦合參數在整體結構的所考慮的頻段都不靈敏,即耦合參數的大小變化對整體結構的動態特性影響較小,具體辨識過程中很難準確辨識。表5中耦合參數的誤差較大也印證了這一點。對于此類情況,可忽略結合部的耦合參數,直接構建結合部等效模型如式(20)所示

表5 辨識公式的結果Tab.5 Parameter identification result
(20)

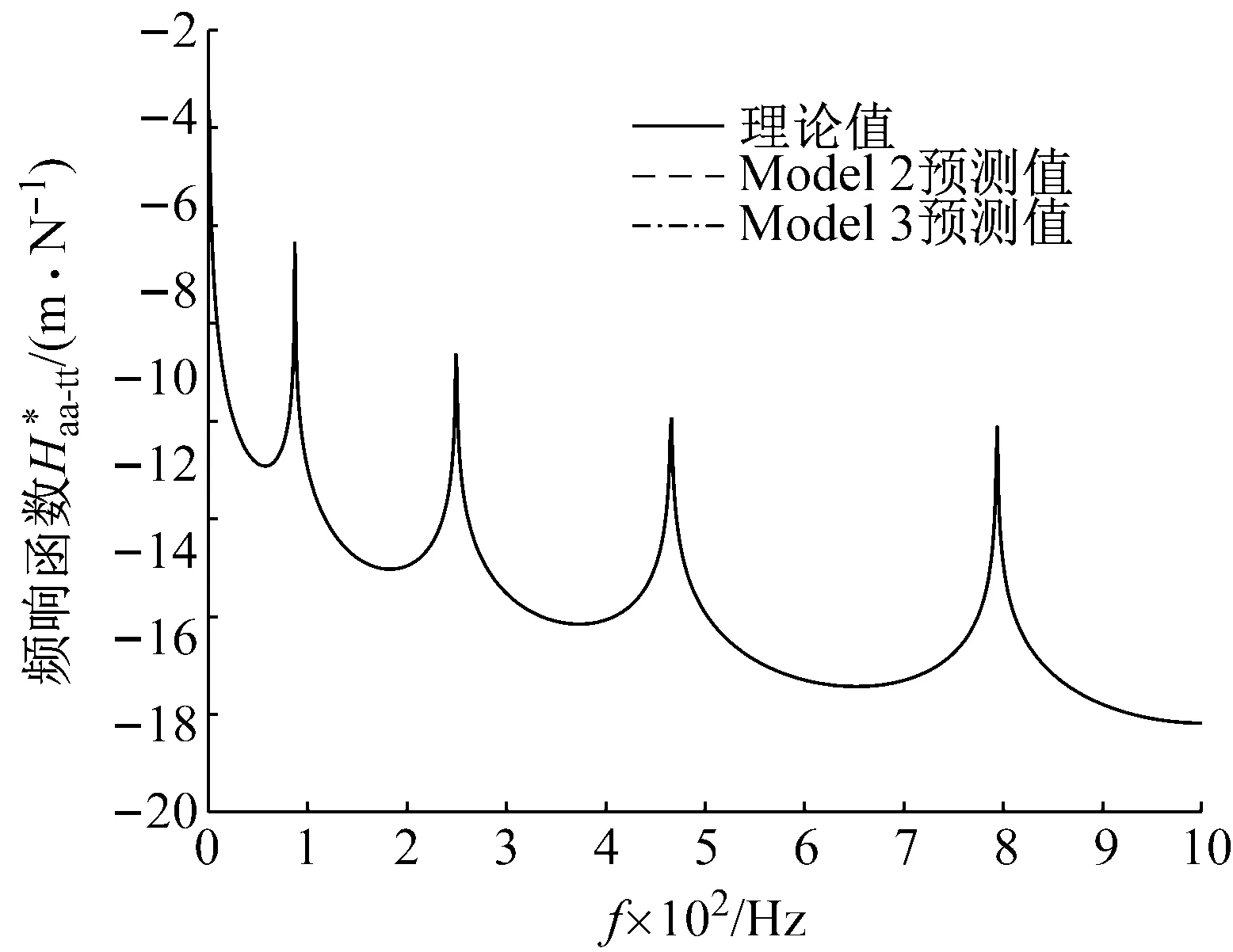
圖15 整體結構頻響函數的預測值與理論值對比圖Fig.15 Comparison between the predicted values and the theoretical values of assembly structure FRFs
3 實驗算例研究
圖17為實驗時測試點分布的具體位置及子結構單元劃分圖。兩個子結構的材料為Q235,通過e1、e2點連接。子結構A的長度為400 mm,子結構B的長度300 mm,梁結構的截面寬為30 mm、高為10 mm,a、b、e1、e2為具體的激勵點與響應點。
采用Model 3模擬整體結構的結合部,選取辨識式(11)辨識結合部參數。
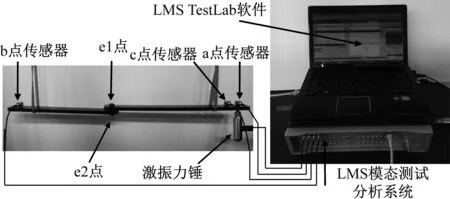
圖16 實驗原理Fig.16 Experimental principle

圖17 實驗測試點分布圖Fig.17 Testing location distribution
3.1 計算子結構頻響函數
實驗材料的密度為7 803 kg/m3,彈性模量為1.95×1011Pa。建立子結構A和子結構B的有限元模型,子結構A劃分為15個單元,子結構B劃分為14個單元,計算出辨識公式(11)中子結構A與子結構B的所有頻響函數。
3.2 計算整體結構a點的頻響函數
在a點附近設置c點,a點距離子結構A的端部為30 mm,a、c兩點之間的距離為s=30 mm。
分別激勵a點、c點,讀取a點、c點的響應,得相應的平動頻響函數曲線,如圖18所示。由式(17)計算得整體結構a點激勵a點響應的所有頻響函數,表示在圖19中。同時可得在0~1 000 Hz以內整體結構有4階固有頻率,分別為92 Hz、300 Hz、564 Hz、900 Hz。
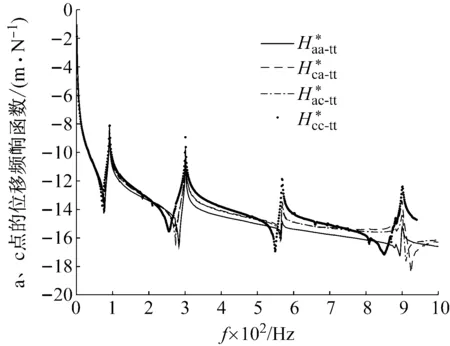
圖18 實驗測試a點、c點的頻響函數Fig.18 Experimental FRFs result of location a and c

圖19 整體結構a點的頻響函數Fig.19 FRFs result of point a to assembly structure
3.3 靈敏度分析
電化學問題離不開電子的行為,說它是電化學理論的靈魂并不過分,電子的行為表現為定向和定量兩個方面。定向方面列表如下:而定量方面可對原電池及電解池的相關問題進行全面的計算。

表6 遺傳算法尋優結果Tab.6 Optimization result of GA
3.4 結合部參數的辨識

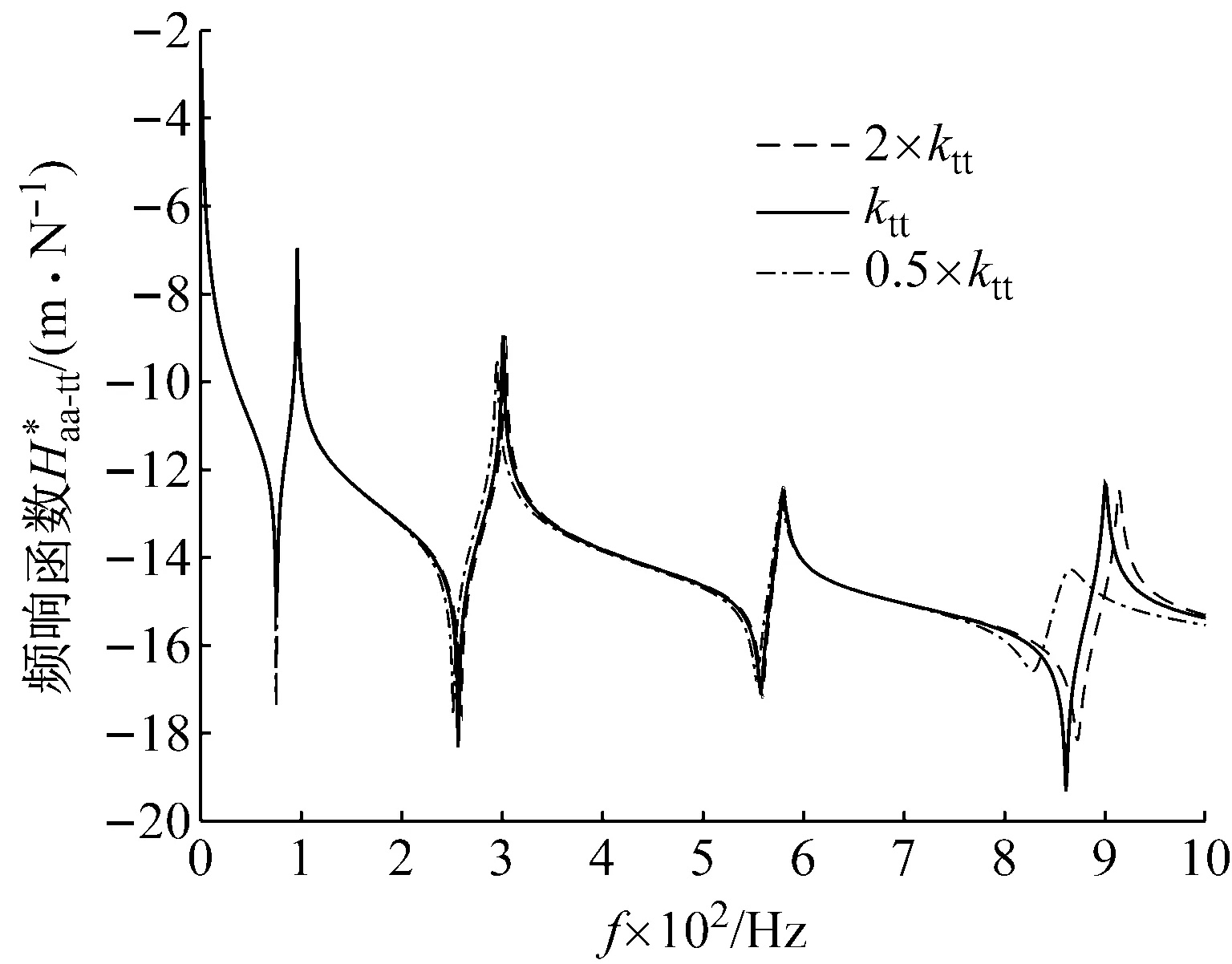
圖20 對ktt靈敏度分析Fig.20 Sensitivity analysis of ktt

圖21 對krr靈敏度分析Fig.21 Sensitivity analysis of krr
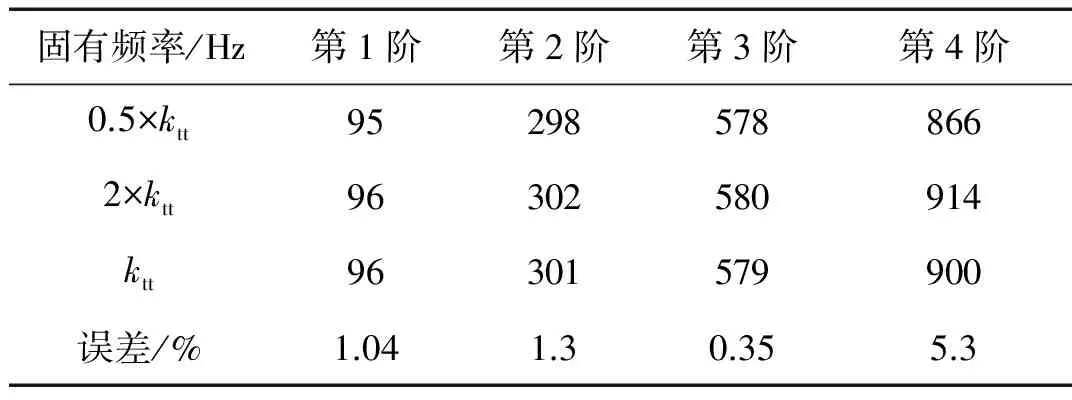
表7 ktt靈敏度分析表Tab.7 Sensitivity analysis of ktt

圖22 整體結構的頻響函數Fig.22 FRFs of assembly structure

表10 遺傳算法與本文方法的辨識結果對比Tab.10 Identification result comparison betweenGA and the proposed method
4 結 論
(1)提出一種對結合部參數辨識的新方法。先通過遺傳算法尋優確定結合部參數的初值,再對結合部各項參數進行單獨靈敏度分析,計算該參數在每一階模態處的靈敏度,在最靈敏的模態處單獨辨識該項參數,最后依此方法辨識所有的結合部參數。
(2)仿真和實驗算例的研究結果表明,基于本文方法辨識的結合部參數所預測的整體結構頻響函數與實驗測試的頻響函數具有較高的一致性,從兩者的固有頻率的對比結果看,最大的相對誤差出現在第1階,為1.09%,參數辨識精度較高。
參 考 文 獻
[1] 蔡力鋼,王鋒,李玲,等.栓接結合部動態特性研究進展[J].機械工程學報,2013,49(9):158-168.
CAI Ligang, WANG Feng, LI Ling, et al. Review on dynamic properties of bolted joints[J]. Journal of Mechanical Engineering, 2013, 49(9):158-168.
[2] 李金峰,王立平.改進的受力狀態映射法在結合部動力學參數辨識中應用[J].振動與沖擊,2016,35(6):488-496.
LI Jinfeng,WANG Liping. Application of an improved force-state mapping method in dynamic parameter identification of joints[J]. Journal of Vibration and Shock, 2016, 35(6):488-496.
[3] OKUBO N, MIYAZAKI M. Development of uncoupling technique and its application[C]//Proceedings of International Modal Analysis Conference. Orlando, FL,1984.
[4] TSAI J S, CHOU Y F. The identification of dynamic characteristics of a single bolt joint[J]. Journal of Sound and Vibration, 1988, 125:487-502.
[5] WANG J H, LIOU C M. Experimental substructure synthesis with special consideration of joint effect[J]. International Journal of Analytical and Experimental Modal Analysis, 1989, 5(1):1-12.
[6] HWANG H Y. Identification techniques of structure connection parameters using frequency response functions[J]. Journal of Sound and Vibration, 1998, 212(3):469-479.

[9] REN Y, BEARDS C. F. Identification of joint properties of a structure using FRF data[J]. Journal of Sound and Vibration, 1995, 186(4):567-587.
[10] YANG T, FAN S H, LIN C S. Joint stiffness identification using FRF measurements[J]. Computers & Structures, 2003, 81: 2549-2556.
[11] MEHRPOUYA M, SANATI M, PARK S S. Identification of joint dynamics in 3D structures through the inverse receptance coupling method[J]. International Journal of Mechanical Sciences, 2016, 105: 135-145.
[12] 李玲,蔡安江,蔡力鋼,等.栓接結合部動態特性辨識方法[J].機械工程學報,2013,49(7):168-175.
LI Ling, CAI Anjiang, CAI Ligang, et al. Identification method for dynamic properties of bolted joints[J]. Journal of Mechanical Engineering, 2013, 49(7):168-175.
[13] 李玲,蔡力鋼,郭鐵能,等.機械結合部動態剛度辨識與實驗研究[J].振動工程學報,2012,25(5):488-496.
LI Ling, CAI Ligang, GUO Tieneng, et al. Identification and experimental research on dynamic stiffness of mechanical joints[J]. Journal of Vibration Engineering, 2012, 25(5):488-496.
[14] 郭鐵能,李玲,蔡力鋼,等.基于頻響函數辨識機械結合部動態參數的研究[J].振動與沖擊,2011,30(5):69-72.
GUO Tieneng, LI Ling, CAI Ligang, et a1. Identifying mechanical joint dynamic parameters based on measured frequency response functions[J]. Journal of Vibration and Shock, 201l, 30(5):69-72.
[15] 李玲,蔡安江,蔡力鋼,等.栓接結合部動態特性參數辨識新方法[J].振動與沖擊,2014,33(14):15-32.
LI Ling, CAI Anjiang, CAI Ligang, et al. New method to identify dynamic characteristics of bolted joints[J]. Journal of Vibration and Shock, 2014, 33(14):15-32.
[16] 董冠華,殷勤,殷國富,等.機床結合部動力學建模與辨識方法的研究[J].機械工程學報,2016,52(5):162-168.
DONG Guanhua, YIN Qin, YIN Guofu, et al. Research on dynamics modeling and identification of machine tool joints[J]. Journal of Mechanical Engineering, 2016, 52(5): 162-168.
[17] KLERK D, RIXEN D, VOORMEEREN S, et al. Solving the RDOF problem in experimental dynamic substructuring[C]//Proceedings of the 26th international Modal Analysis Conference. Orlando, FL, 2008.
[18] DUARTE M L M,EWINS D J. Rotational degrees of freedom for structural coupling analysis via finite difference technique with residual compensation[J]. Mechanical Systems and Signal Processing, 2000, 14(2):205-227.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
