多點復雜載荷作用下結構振動仿真與試驗研究
2018-06-25 02:46:20謝志勇周其斗潘雨村海軍工程大學艦船工程系武漢430033
振動與沖擊 2018年11期
謝志勇, 周其斗, 潘雨村(海軍工程大學 艦船工程系, 武漢 430033)
聲隱身性能對艦船而言,直接關系到其生存能力和自身武備性能的發揮。通常艦船結構內部安裝有各種機械運轉設備等,機械設備通過螺栓等多點安裝于基座面板或浮筏,因而在結構振動和聲輻射研究中多點激勵問題是船舶工程上經常遇到的問題。而船艙中的多源激勵問題通常存在各振源間的相互作用,它們產生的振動噪聲問題必須采用隨機信號的統計分析、頻譜分析、相關分析方法等。由于各激振源間并非獨立,按線性系統的多輸入多輸出理論,結構表面振動的功率譜密度將與各個力源自身的功率譜密度相關,同時與各力源間的互功率譜密度相關,還與各力源至結構表面的傳遞函數有關。正如文獻[1]所指出的,多源激勵下結構振動輻射噪聲的響應譜密度不僅與各激振力的功率譜密度有關,而且與他們的互譜密度相關。
在多源激勵下結構振動輻射噪聲問題研究方面,Allen等[2-4]采用結構有限元和流體邊界元的方法計算結構在湍流邊界層激勵下的輻射噪聲問題。以簡支平板為算例,將平板劃分區域,在各區域上作用單位載荷以計算結構傳遞函數,區域上采用數學模型模擬邊界層作用,計及各片區互譜密度,但此方法并沒有考慮結構與流體相互耦合作用。Tao等[5]從平板的運動方程出發,采用解析的方法考慮了無限大板在分別與輕流體、重流體耦合振動時由于多點激勵產生的聲輻射,其中作用于結構的多個力源間具有相位差并且考慮相關性,主要考慮同相和反相兩種工況,其中反相相當于對平板作用矩激勵,得出結論:遠場總的輻射聲壓級不能由單點力激勵時的輻射聲壓進行簡單疊加而得到。類似,Burroughs等[6-7]采用空間傅氏變換解析法得到周期加筋柱殼結構在不同類型激勵力作用下的輻射聲壓,其中同相、反相徑向激勵、力矩激勵等可視為相位差固定為0°或者180°的多源激勵問題。
陳明等[8]設計了一個多艙段復雜殼體模型,進行單臺設備單獨激勵后所得輻射噪聲非相關疊加與多臺設備同時激勵所得輻射噪聲的對比研究,結果表明,多源激勵下的結構響應和輻射聲場可以近似為單源激勵下結構響應和輻射聲場的非相干疊加,條件為兩個隨機激勵源間相關性不強、輻射聲壓之間的相關系數不大于0.5。此處考慮多個設備激勵時的聲輻射問題,對于諸如單臺設備多個機腳輸入之間具有相位差對聲輻射影響并未予以研究。王雪仁等[9]則利用兩臺激振器開展了多源激勵條件下結構振動響應的試驗研究,認為相位對多點激勵下結構的振動響應有明顯影響,相位因素不可忽略;而激勵源之間的耦合關系由模型尺寸、模態密度、激勵頻率及激勵力大小等多種因素決定。有限元法可正確預測弱耦合或非耦合多點源勵源作用下的結構振動響應。劉濤[10]在1∶2.8大尺度艙段縮比模型內部放置振動電機模擬潛艇主電機振動,在具有明顯線譜特征的振動電機激勵源下,測量殼體在水下的振動及輻射聲場。對于具有四個支撐點的振動電機基座,選擇其中一條對角線上的兩個支撐點作為振動激勵點,但對于各激振點之間的相關性并沒有考慮。葉文榮等[11]采用有限元技術對圓柱殼內多點激勵力位置、相位等參數以徑向均方速度最小為目標進行優化配置時認為多點激勵力的相位變化對結構的振動響應影響較大,工程中應引起重視。周軍偉等[12]認為傳遞函數法中激勵力難于識別,避開求解激勵力而直接由激勵力作用系統各點響應間的傳遞關系試圖實現對系統未知響應的預報評估。
本文以安裝于基座面板上的某激振電機作為激振源,與基座面板通過力傳感器進行多點連接,分別使用力傳感器和加速度計測量激振電機運轉時輸入至結構的激振力和安裝點處的加速度值,結合有限元仿真所得傳遞函數,對多點激勵下的振動響應進行試驗和仿真研究。探討了結構在力型輸入和加速度型輸入條件下,多點激振的振動響應求解方法,試驗研究的結果驗證了多點激振時傳遞函數理論計算結果的正確性。對比研究結果表明采用力型輸入所得結果與實驗結果符合最好,影響加速度型作為輸入條件求解振動響應精度的因素多,并非采用的加速度通道越多越好。
1 基本理論
1.1 多輸入多輸出系統對隨機激勵響應
對于船艙內部的多源激勵情況,存在各激勵源之間的相互作用,一般各激勵源又并非統計獨立,按照多輸入多輸出系統(MIMO)系統理論,船體表面振動的功率譜密度不僅與各個力源的功率譜密度和力源到表面的振動傳遞函數有關,還和力源之間的互功率譜密度相關。
對于多個隨機激勵下的場點響應譜密度函數可表示為
(1)

將式(1)表示成矩陣形式如下
Spp(f)=H*(f)·S(f)·H(f)
(2)
式(1)和式(2)說明多個激振力作用下,場點響應譜密度不僅與各激振力自功率譜密度和傳遞函數相關,而且與各激振力間的互譜密度相關。在求解多激振力作用下的場點響應譜密度時,需要首先獲得各激振點對場點響應的傳遞函數;同時也需要獲得各激振力的自譜密度函數和互譜密度函數。
1.2 多點激振的振動響應求解方法
多點激振的振動響應求解方法的基本思路:以某安裝于基座的激振電機作為振動源,以實測各機腳激振力作為輸入,將有限元仿真計算所得的傳遞函數作為線性系統的傳遞函數(也可以采用實驗的手段獲得),考慮各激振力自譜和互譜,得到結構在多點源勵下的振動響應仿真結果。采用加速度計測量結構的振動響應,將傳遞函數結合實測激振力值作為激勵輸入的仿真計算結果與加速度實際測量結果進行比較研究。在此基礎上進行了結構在力型輸入和加速度型輸入條件下仿真結果與試驗結果的對比研究。
該實驗結果與仿真結果進行對比流程可用圖 1簡要表示,結果的對比在頻率域中展開。

圖1 仿真結果與實測結果對比計算流程圖Fig.1 Flow chart of comparison between calculation and experiment
2 艙段結構與試驗配置
2.1 艙段結構基本參數
以某艙段結構為原型,設計并制造加肋圓柱殼艙段模型結構。模型的幾何尺寸及其材料屬性如表1所示。
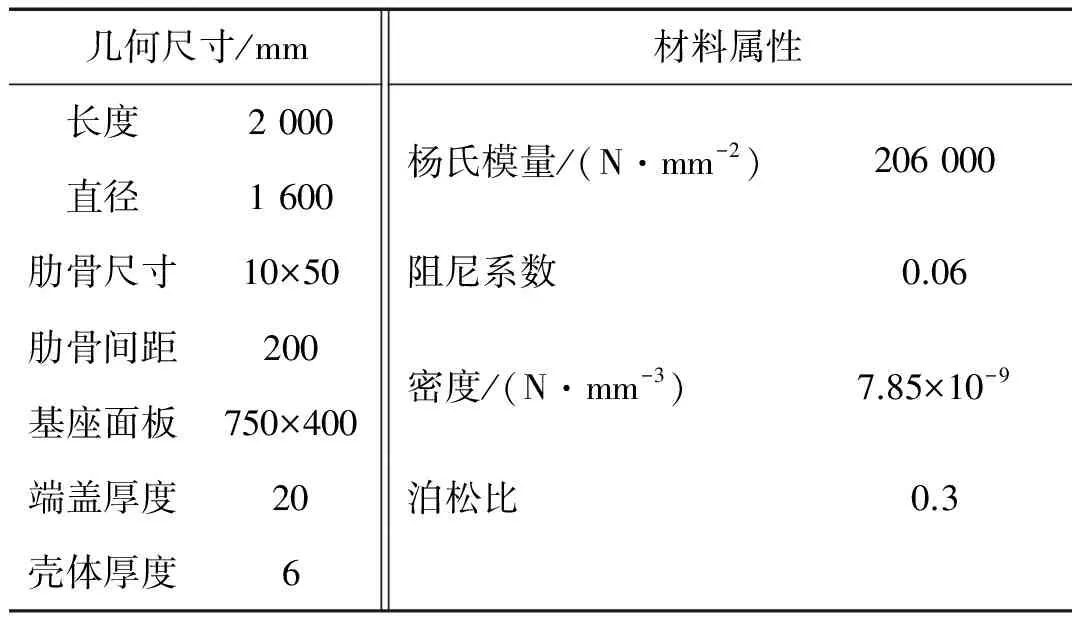
表1 模型幾何尺寸及其材料屬性Tab.1 Model scale and material property
2.2 艙段結構有限元模型
結構有限元模型采用MSC.PATRAN建模,使用CQUAD4單元。有限元模型如圖 2所示,單元尺度為50 mm,單元總數9 353,節點總數9 436,模型經過對自由邊、連續性、重復單元、重復節點等檢查。有限元模型網格尺寸經過多個網格尺度模型的數值收斂計算考核確定。有限元模型正確性通過試驗模態頻率、模態振型和頻響函數的測試結果進行了驗證[13]。

圖2 柱殼結構有限元模型Fig.2 FE model of ribbed cylinder (mesh size 50 mm)
2.3 試驗基本配置
激振源采用帶偏心塊的電機模擬,使用串接的4個力傳感器測量通過機腳輸入至結構的激振力,同時采用加速度計測量柱殼結構上典型測點的加速度響應值。測試過程中基座上力傳感器的安裝情況如圖 3所示,力傳感器與基座連接位置分別定義為①、②、③、④號激勵點,力傳感器上下兩端分別連接電機機腳和基座面板安裝孔。力傳感器、加速度傳感器、放大器及數據采集板卡等均經校準并在有效期內使用。其中力傳感器采用動態正弦力校準方法代替“靜標動用”方法進行標定和計量[14],以保證動態力值測量的準確性。力傳感器配合高性能、測試量程可調的電荷放大器實現力值的高精度測量。同時在基座面板上和電機機腳處均安裝三向加速度傳感器,以測量加速度響應。使用的力傳感器型號為Kistler 9331B,單向加速度傳感器型號為PCB JT352M174,三向加速度傳感器為PCB T356A16。

圖3 電機與力傳感器的安裝布置圖Fig.3 Collocation of vibrator and force sensors
為消除外部環境對試驗產生的影響,艙段結構模型采用軟連接方式懸吊,如圖 4和圖 5所示。采用ABB變頻器對激振電機進行控制,使其運轉在不同的轉速下進而產生不同的激振頻率。實驗過程中的電荷放大器測力系統、PXI機箱數據采集系統和被測艙段結構等的安裝配置情況如圖 4所示。殼體加速度傳感器布置情況如圖 5所示。

圖4 各測試系統布置圖Fig.4 Collocation of test system
3 多點激振力作為輸入的振動響應
3.1 數據處理與程序實現
在變頻器控制的運轉工況下,待電機運行穩定后進行激振力與加速度響應的同步數據采集,根據Nyquist采樣定理,將采樣率設置為10 240 Hz,分析的頻率分辨率設置為1 Hz,變頻器控制頻率175 Hz。對激振信號進行分析求取幅值譜密度、功率譜密度和互譜密度等,采用線性平均結果作為最終的結果,以消除隨機誤差帶來的影響。

圖5 殼體加速度計布置情況Fig.5 The accelerometers collocation of the ribbed cylinder
測試數據的采集和分析均采用LabVIEW軟件進行。通過LabVIEW提供的MATLAB script node功能,在LabVIEW環境下進行混合編程,綜合運用LabVIEW和MATLAB兩種編程語言的優點,編寫了計算程序,程序計算流程如圖 6所示。圖 7為采用MATLAB和LabVIEW混合編程實現譜運算的部分源程序。
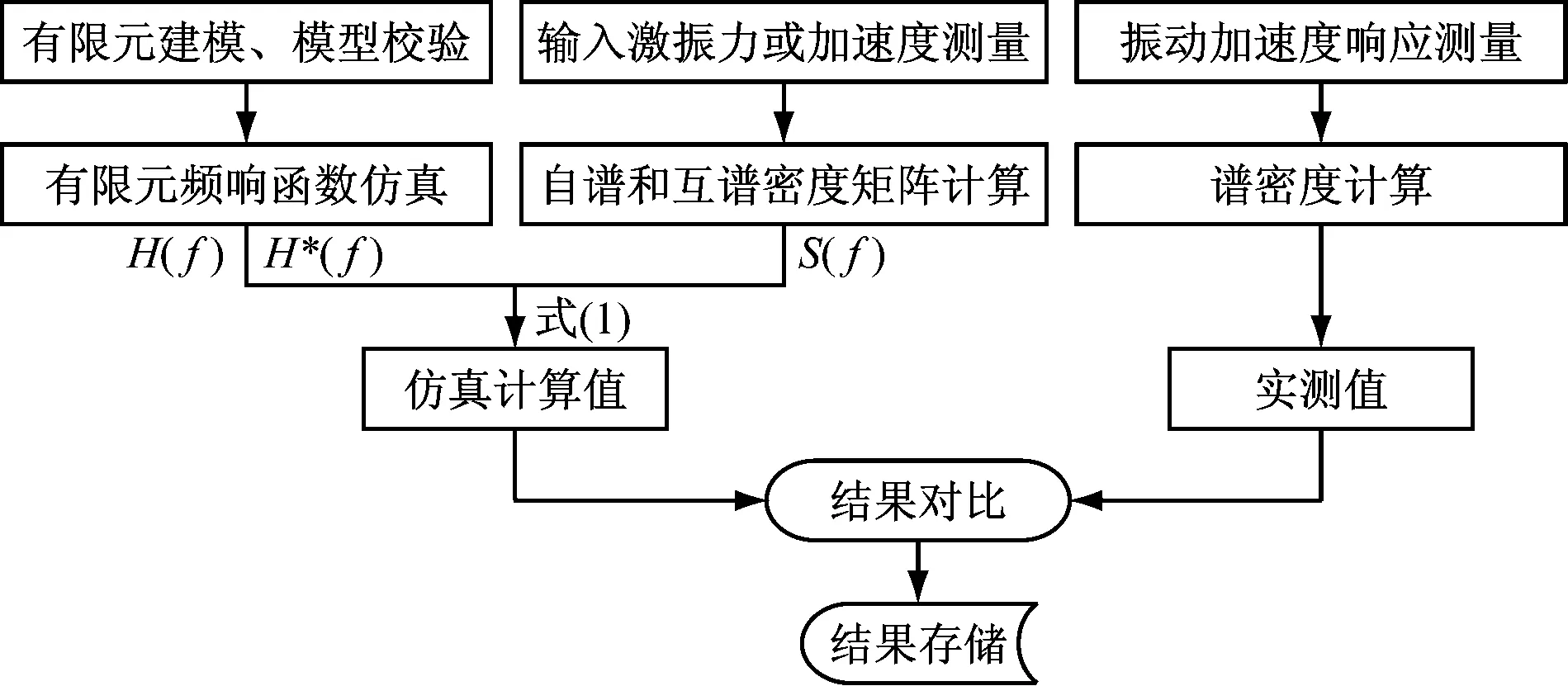
圖6 程序計算流程圖Fig.6 Flow chart of the computational procedure

圖7 LabVIEW和MATLAB混合編程Fig.7 Hybrid program of LabVIEW and MATLAB
3.2 輸入激振力與相差
圖 8為①、②、③、④號激勵點處4個力傳感器實際測量得到的激振力時域信號片斷,從圖中可以看出,四個機腳輸出的激振力大小不同,并且具有一定的相位差,即便是安裝于機腳同一側的力傳感器所測得的力值結果也是如此,而且存在有明顯的毛刺,即激振力成分中含有高頻的頻率成分。在此工況主要激振力頻率下,經計算可得激振力在1號點和2號點之間相位差16°,1號點和3號點之間相位差13°,1號點和4號點之間相位差14°。并且不同激勵頻率作用下的多次實測結果表明,各激勵點激振力在主要激振頻率處的相位差隨激振頻率的不同而不同,且激振力大小隨頻率變化較為劇烈,因此有必要考慮相位差的影響。
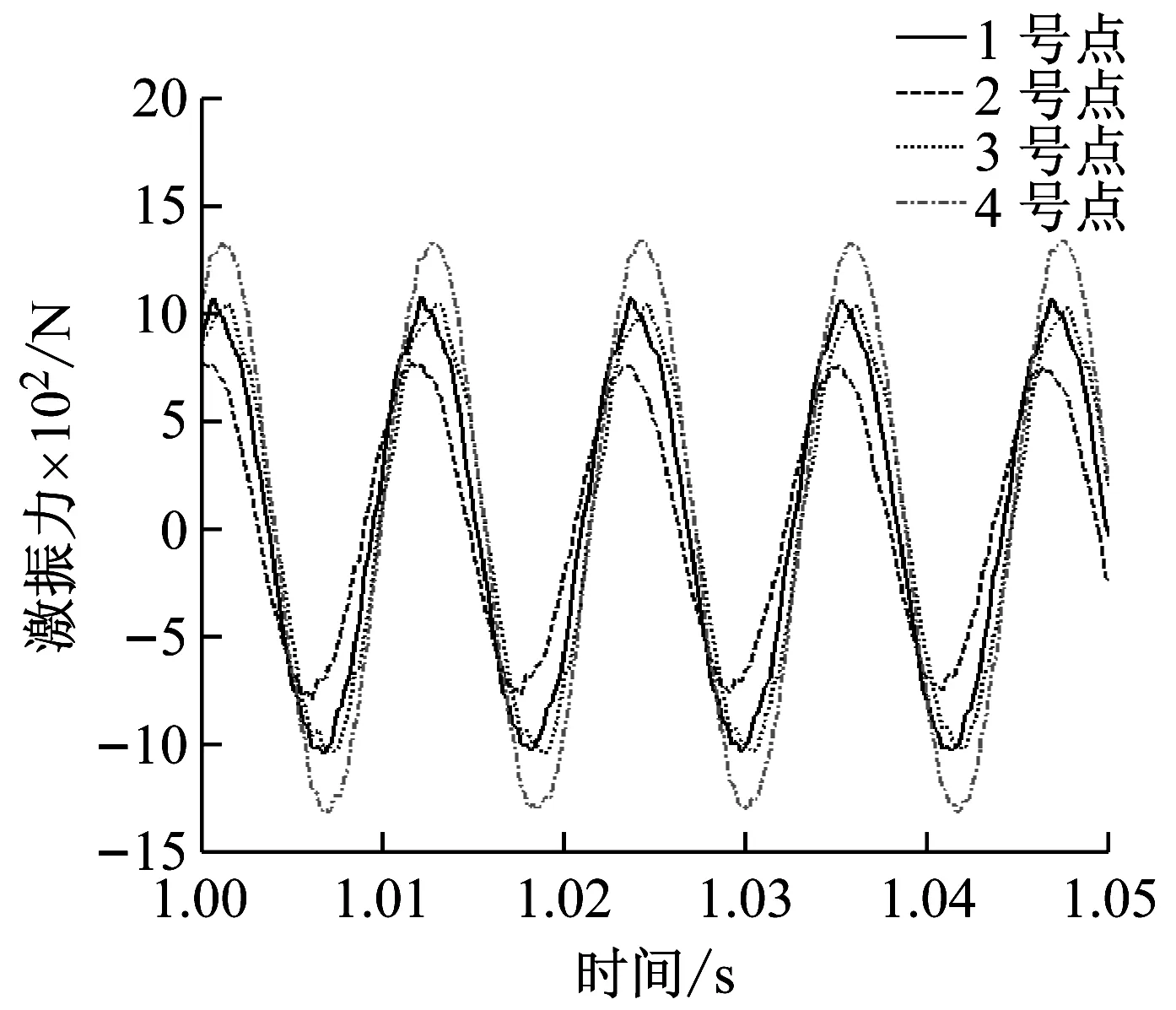
圖8 4個激勵點激振力的時域波形Fig.8 Time waveform of four force signals
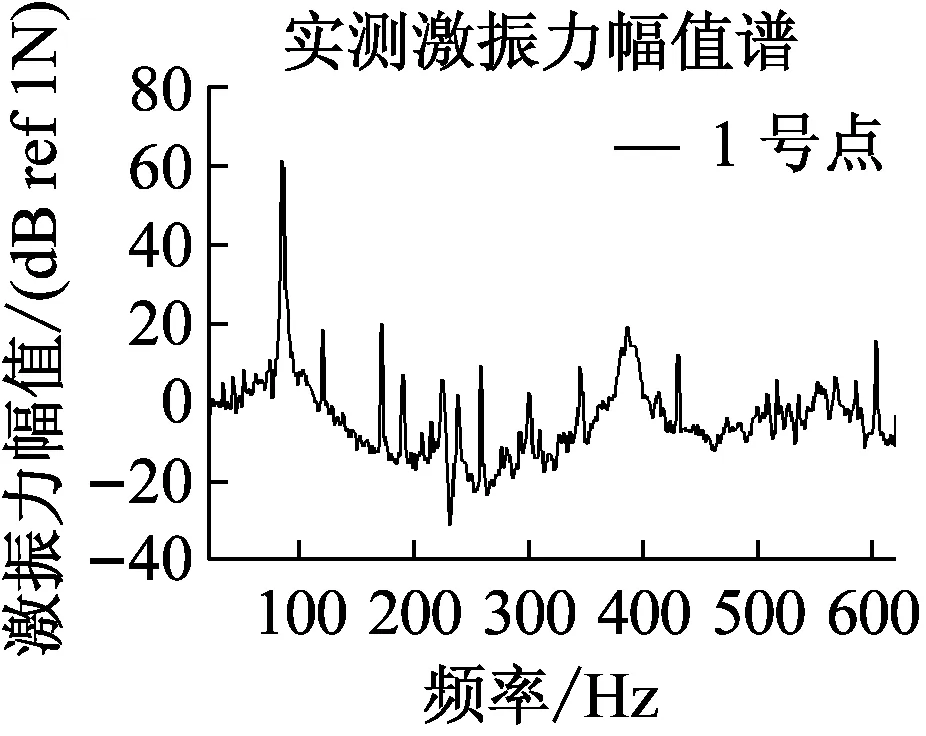
圖 9所示為四個激振點激振力的幅值譜密度,用分貝(dB)表示。譜分析的結果表明,四個激振點處的激振力特性均類似,但是四者的幅值存在差異。從圖上易知,激振力譜具有明顯的線譜特征,主要激振頻率處的激振力幅值比其他頻率大40 dB以上。根據線性系統的疊加原理,結合各激振點的激振力譜和系統的傳遞函數,將由各激振力所引起的響應進行疊加,并且考慮各點輸入激振力之間互相關的影響,就可以求解系統的振動響應。
3.3 振動加速度響應
結構外部典型響應測點的加速度傳感器布置情況如圖 5所示,分別布置在結構的軸向、橫向和周向,以測試各個方向上的加速度響應。選取典型測點:測點O1測量端蓋板軸向響應;測點72和192橫向布置,測量殼體水平橫向響應;測點6位于柱殼結構的頂部,測量殼體垂向響應。軸向定義對應于有限元模型中的Y軸,橫向定義代表有限元模型中的X向,垂向定義代表有限元模型中的Z向。并對圖例作如下定義:以實測力值結果作為輸入結合有限元仿真計算所得到傳遞函數作乘積運算得到的響應值為“仿真值”,圖例為“仿真值”;以實際測點的加速度測量譜分析結果作為該響應點的“實測值”,圖例為“實測值”。
(a)

(b)

(c)
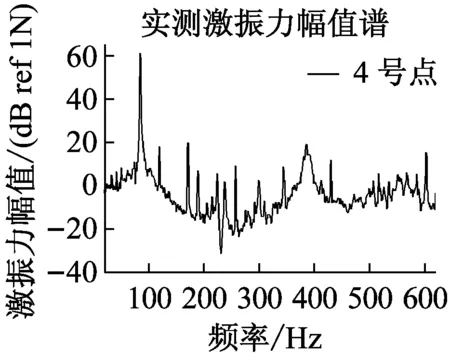
(d)圖9 四個激振點激振力幅值譜(分貝表示)Fig.9 Magnitude spectrum of four force signals (dB)
(a)

(b)

(c)

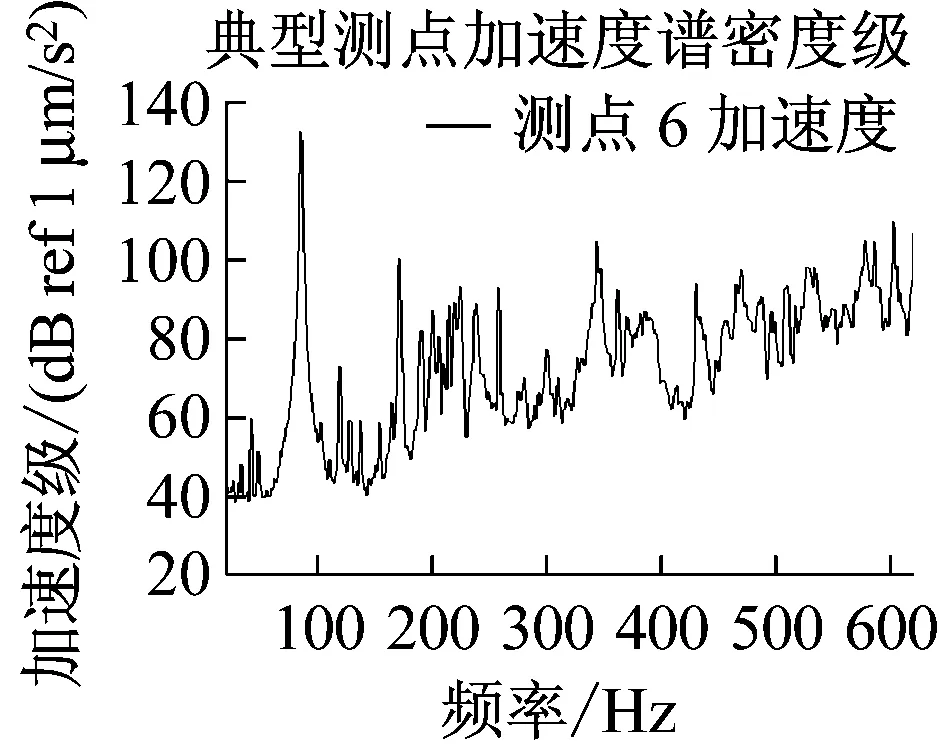
(d)圖10 典型測點加速度響應譜密度級Fig.10 Measured acceleration level at typical points
圖 10給出典型測點6、72、192和O1實際測得的加速度響應譜密度級。測點6位于柱殼結構的頂部,測量方向為垂向,易見該響應曲線具有明顯的譜峰特性,并且具有明顯的高階諧波成分和其他由于機械摩擦等造成的高頻成分。測點72和192測量方向為水平方向,可見該響應結果同樣具有明顯的譜峰特性和高頻分量成分。位于端蓋板上加速度計O1在軸向上的響應值明顯低于柱殼結構周向測點上的響應值。
3.4 實測值與仿真值對比
首先通過有限元仿真的方法獲得各激勵點位置到結構上加速度響應測點的振動傳遞函數,使用的有限元模型及相關參數設置如前所述,然后根據前述的多點激勵仿真結果與實測結果對比的方法得出仿真結果與實測結果。
圖 11~圖 14為典型測點6、72、192和O1實際測得的加速度響應譜密度級與仿真結果對比曲線。
從圖 11~圖 14不難看出,實驗測量結果與仿真結果符合良好,而且在高頻段兩者的振動響應趨勢也能符合良好。結合激振力譜特性和傳遞函數特性,可以較好地分析響應點頻率響應函數的頻譜特性,即傳遞函數相當于在各頻率點處對輸入信號放大倍數不同的放大器,在其共振頻率點處,即使較小的輸入激勵也能引起較大的響應;而在其非共振區域則需要很大的激振力才能引起較大的響應。試驗過程中還發現激振力譜在其激振電機工作頻率外的其余頻率點處激振力是比較小的,但是由于振動頻率響應函數存在共振峰值,因此其合成的加速度響應輸出仍呈現出多譜峰特性,說明系統的響應取決于輸入激振力和系統傳遞函數兩者的幅頻特性,這兩個方面缺一不可。系統傳遞函數的頻率特性一般來說是客觀存在,制造完成后較難更改,如船體結構等。在采用實驗或者有限元仿真的手段獲得船體結構的傳遞函數后,根據傳遞函數幅頻和相頻特性,對將要安裝于其上的機器設備提出關于振動頻率和振動幅值的相關指標,使機器設備的主要激勵頻率與船體結構通道傳遞函數譜峰頻率錯開,避免振源振動峰值通過傳遞函數再次得到放大,這一點可用于指導水下結構減振降噪設計。
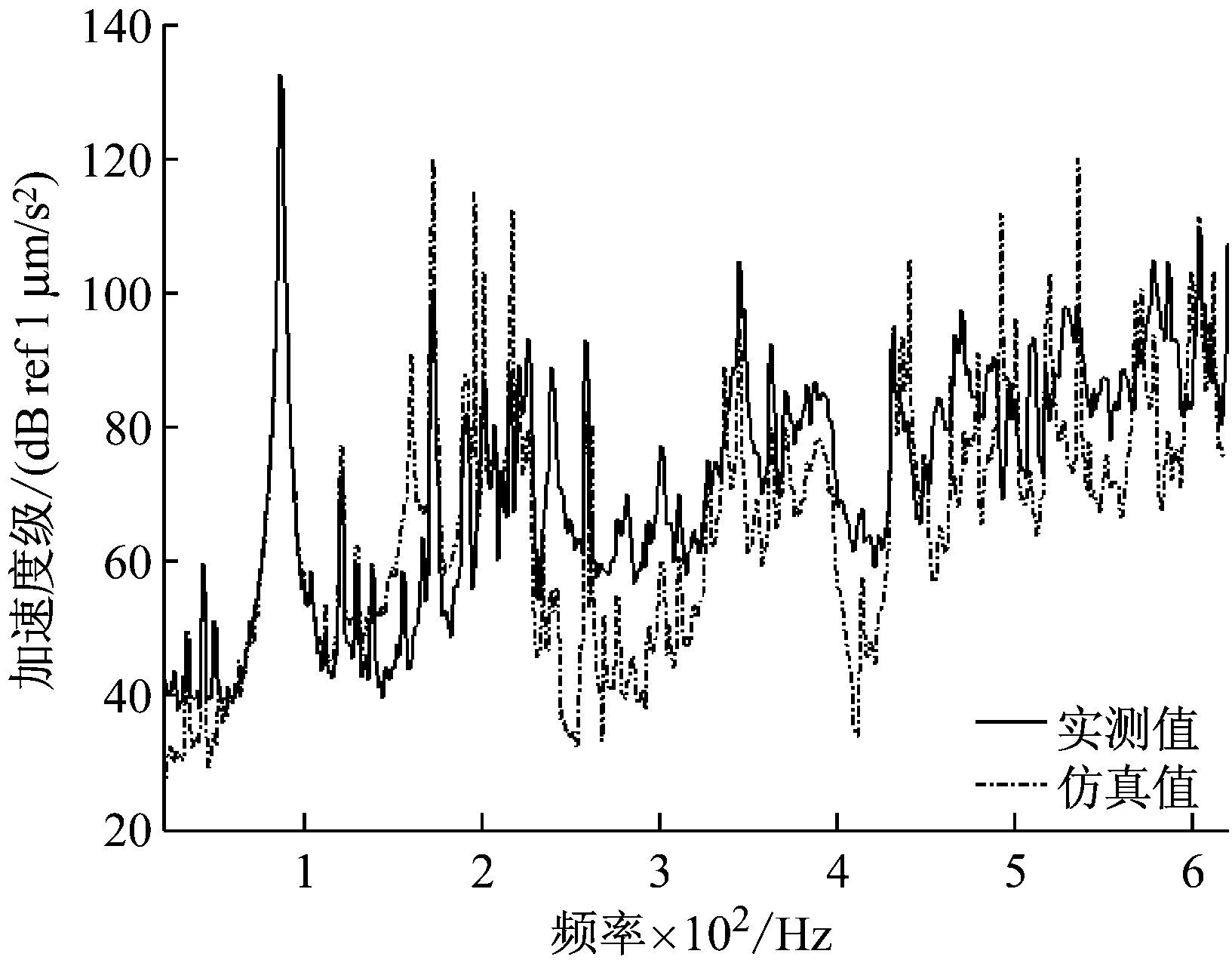
圖11 測點6垂向加速度響應(4個力通道輸入)Fig.11 Response of point 6 under 4 force inputs exerted on the base(20~620 Hz)
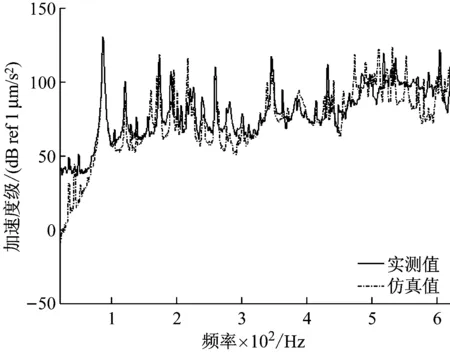
圖12 測點72橫向加速度響應(4個力通道輸入)Fig.12 Response of point 72 under 4 force inputs exerted on the base(20~620 Hz)

圖13 測點192橫向加速度響應(4個力通道輸入)Fig.13 Response of point 192 under 4 force inputs exerted on the base(20~620 Hz)
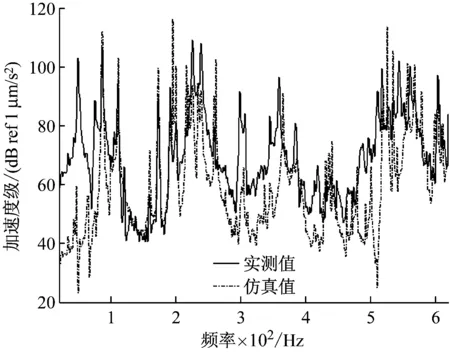
圖14 測點O1軸向響應(4個力通道輸入)Fig.14 Response of point O1 under 4 force inputs exerted on the base(20~620 Hz)
另外由于安裝的力傳感器僅能測量單向的激振力,作為工程上的簡化,從上面的分析結果可以看出,這種簡化在適當的誤差范圍內是能夠滿足工程應用的。
4 多點加速度作為輸入的振動響應
4.1 振源4個三向加速度通道作為輸入
如圖 3所示,在基座激振點力傳感器安裝位置旁同時安裝有三向加速度計用于測量基座位置處輸入至結構的加速度,本節試圖探討以每個激勵點3個方向加速度激勵作為輸入的振動響應問題。與前述采用激振力不同的是,此處采用加速度作為仿真結果的輸入,并且同時考慮“4個作用點×3個作用方向”共計12個通道的輸入,此時的互譜密度矩陣規模相比4個垂直方向的激振力作為輸入而言,達到12×12的互譜密度矩陣規模,計算量和難度要大得多。
其流程是:通過前述有限元仿真獲得各激振點各方向在單位1加速度激勵作用下各測點的頻率響應函數。然后依次按前述方法進行相應編程并且代入實測的加速度輸入信號來獲得仿真的加速度響應譜密度,最后與實測加速度響應譜密度進行比較。采用的實驗工況、有限元模型及相關參數設置同上節。
分別對基座面板上各個激振點處的三向加速度計測量得到的加速度響應信號進行譜分析,給出20~620 Hz頻率范圍內的各激振點位置處三個方向的加速度頻域分析結果如圖 15~圖17所示。從圖上不難看出,在垂向測得的加速度值最大,并且同時具有其他高頻成分和高次諧波,見圖 17,這是由于電機的主要激勵方向為垂向,另外電機內部各部件不平衡或者摩擦均可導致高頻率成分的產生。

圖15 4號激勵點加速度譜密度(軸向)Fig.15 Axis acceleration PSD at location 4
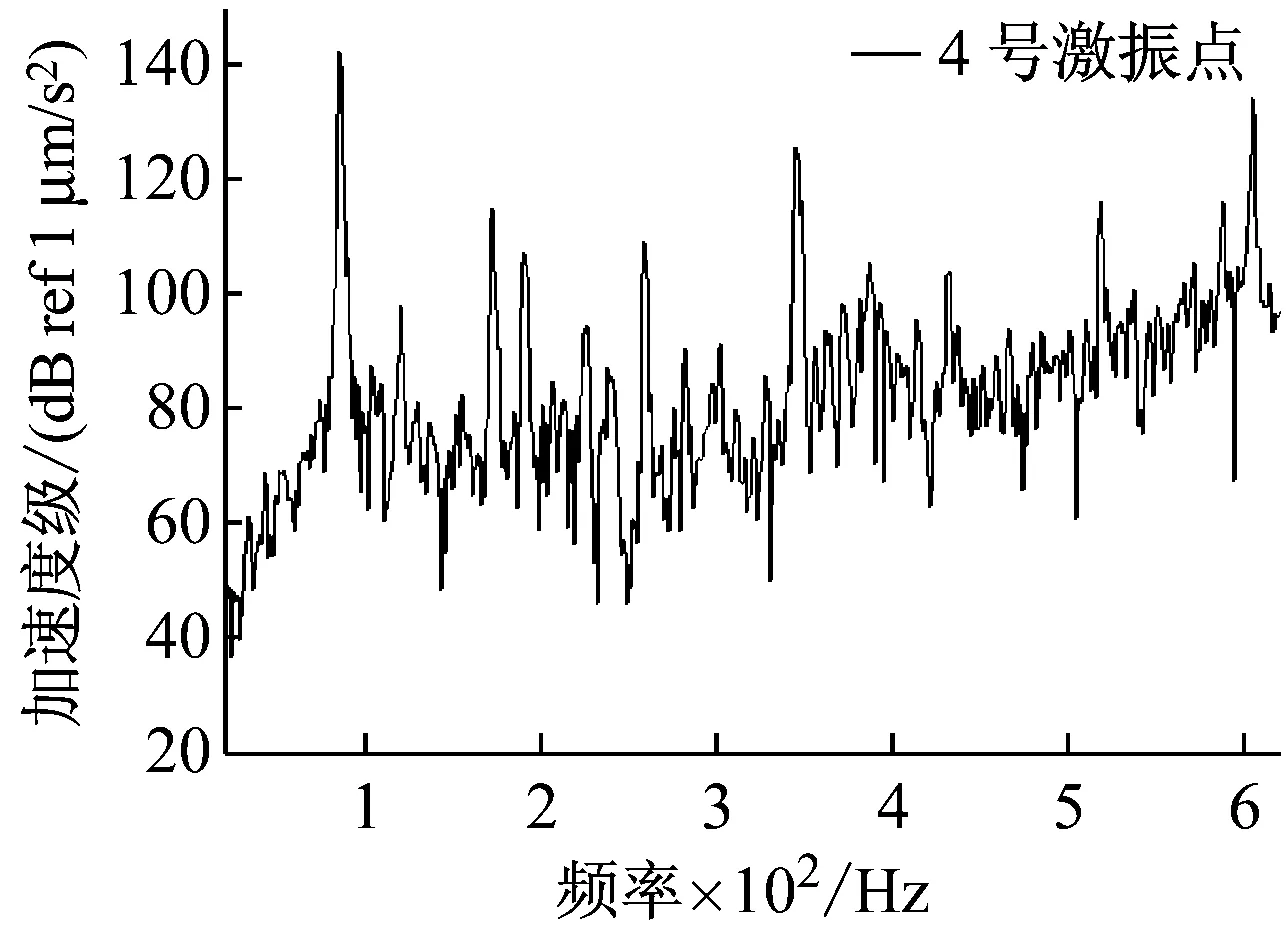
圖16 4號激勵點加速度譜密度(橫向)Fig.16 Transverse acceleration PSD at location 4

圖17 4號激勵點加速度譜密度(垂向)Fig.17 Vertical acceleration PSD at location 4
使用有限元仿真得到傳遞函數,采用實測的方式得到輸入激勵信號,編程完成激勵信號自譜和互譜計算,并綜合傳遞函數計算結果可以得到各測點的加速度響應譜密度。圖 18~圖 21為激振電機在前述運轉工況下,采用基座上12路加速度信號作為輸入,計及自譜和互譜仿真得到的典型測點6、72、192和O1處加速度響應譜密度,并且與實測加速度響應譜密度結果進行對比。

圖18 測點6垂向響應(12個加速度輸入)
Fig.18 Comparision between experiment and calculation acceleration PSD at point 6(12 inputs)

圖19 測點72橫向響應(12個加速度輸入)
Fig.19 Comparision between experiment and calculation acceleration PSD at point 72(12 inputs)
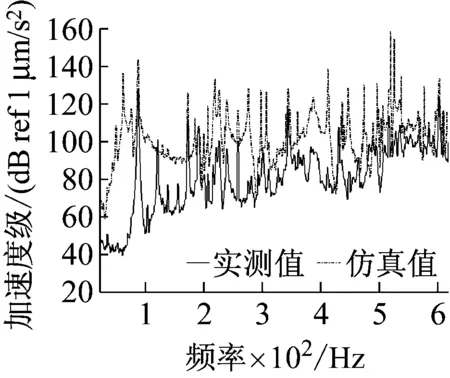
圖20 測點192橫向響應(12個加速度輸入)
Fig.20 Comparision between experiment and calculation acceleration PSD at point 192(12 inputs)

圖21 測點O1軸向響應(12個加速度輸入)
Fig.21 Comparision between experiment and calculation acceleration PSD at pointO1(12 inputs)
從圖 18~圖 21關于測試結果和仿真結果的對比可看出:相比于前節采用4個力傳感器的測量結果作為輸入,采用12個加速度作為輸入所得的結果在軸向測量點O1處的結果要好,但在橫向測點72和192處的結果并沒有得到明顯改善反而變差。原因分析:結合激振點各激勵方向至響應點的傳遞函數特性曲線仿真結果及各通道測得的加速度譜密度可知,振源處的加速度信號,在激振電機的工作頻率外的其余頻率成分,所測得的加速度信號較小,但是各傳遞函數由于其頻率特性并不相同,在其共振頻率處對于極小的加速度輸入也會產生較大的響應,因此即便是很小的加速度測量誤差也會對最終響應的仿真結果產生很大影響,如圖 19和圖 20所示,這主要是由于加速度測量誤差和傳遞函數特性乘積引起。針對此種情況,在實際應用中,考慮到互相關譜密度矩陣的龐大計算量和傳遞函數獲取的難度,能否僅考慮某些主要加速度激勵方向而忽略其余方向來計算其響應?如果可行,將極大地簡化互譜密度矩陣的求解規模,同時減少傳遞函數的求取數量。若輸入的加速度信號信噪比較差的話,舍棄這些通道的輸入信號,還能減少由于這些通道信號輸入導致的隨機誤差。
4.2 振源4個垂向加速度通道作為輸入
為探討上述設想是否可行,采用4個激勵點的垂向加速度激勵作為輸入,在軸向、橫向和垂向典型測點6、72、192和O1處的加速度響應譜密度實測值與仿真值對比曲線分別如圖 22~圖 25所示。
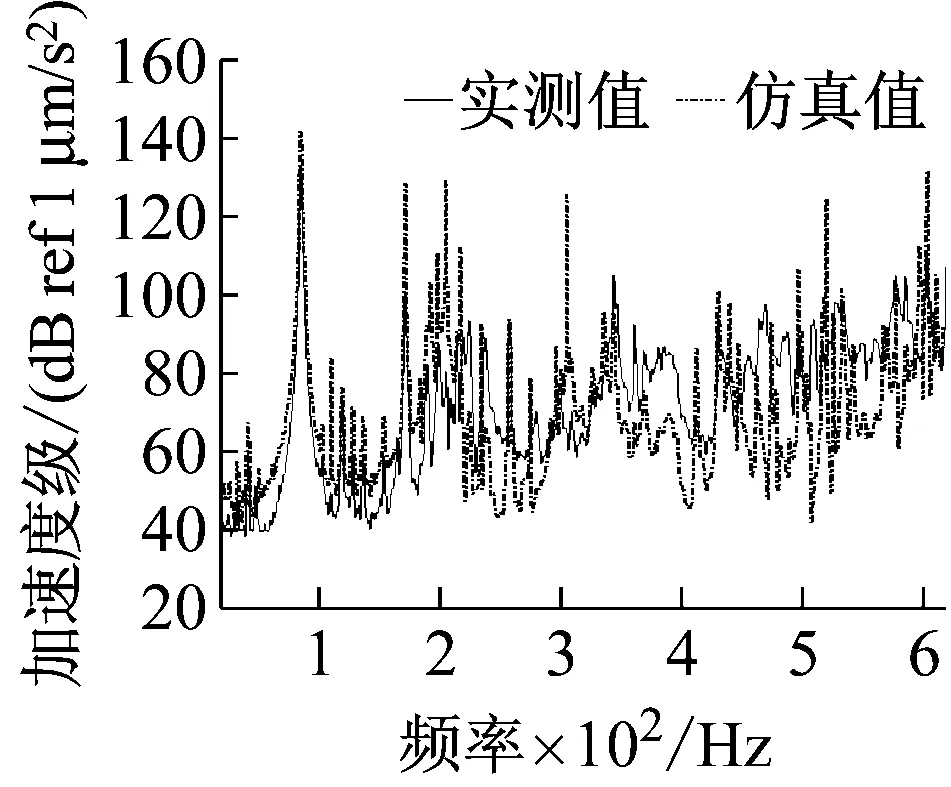
圖22 測點6垂向響應(4個加速度輸入)
Fig.22 Comparision between experiment and calculation acceleration PSD at point 6(4 inputs)
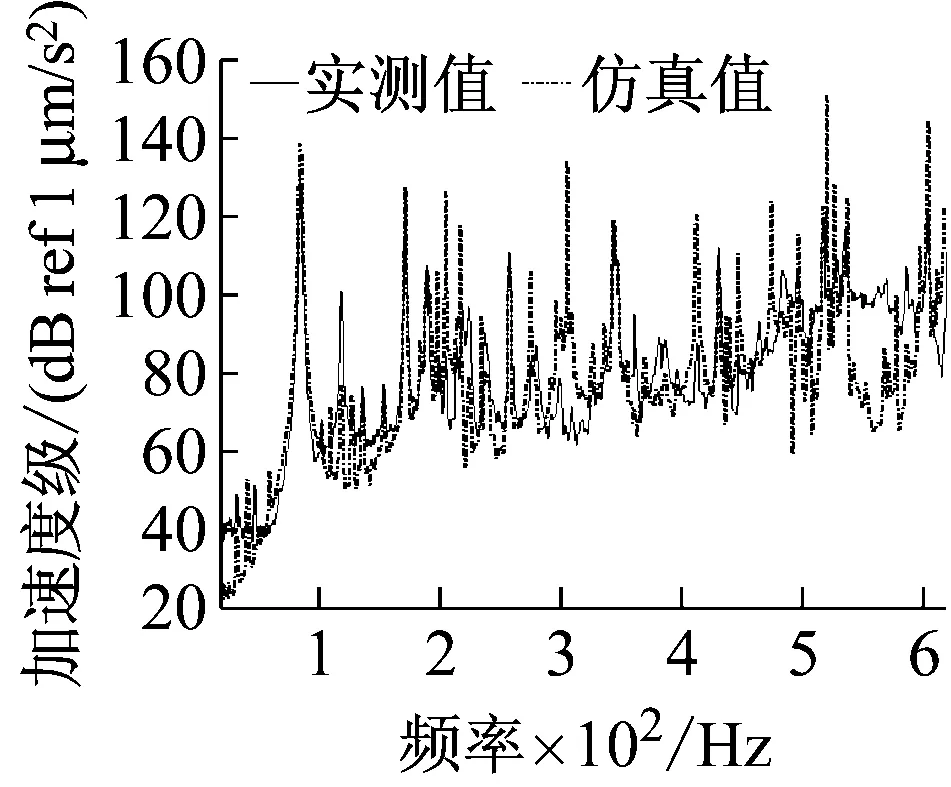
圖23 測點72橫向響應(4個加速度輸入)
Fig.23 Comparision between experiment and calculation acceleration PSD at point 72(4 inputs)

圖24 測點192橫向響應(4個加速度輸入)
Fig.24 Comparision between experiment and calculation acceleration PSD at point 192(4 inputs)

圖25 測點O1軸向響應(4個加速度輸入)
Fig.25 Comparision between experiment and calculation acceleration PSD at pointO1(4 inputs)
可以看出,與前述采用12個加速度通道作為輸入相比,軸向測點O1仿真結果略差,但是橫向測點72和192的計算結果明顯優于12個加速度輸入的結果。這是由于除垂向通道外其余通道本身采集的加速度信號較小,具有較大的隨機誤差,并通過各傳遞函數得到不同程度放大,從而導致總的響應與實際響應值偏差較大,在結果上的反應即表現為:參與互譜計算的通道越多,效果越差。
對于軸向的加速度通道,由于電機自身制造的精度及安裝時的狀態,導致其在軸向的加速度激勵較大,而圖 25中以4個垂向的加速度作為輸入激勵并沒有考慮軸向可能激勵的影響,故仿真的效果較以12個加速度作為輸入所得仿真結果要差,如圖 21所示。因此采用加速度作為輸入,應該結合傳遞函數的特點及所采集到的加速度信號本身信噪比,合適地選擇參與計算的通道個數及其方向。
5 力作為輸入與加速度作為輸入的對比研究
針對前述兩節關于力作為輸入和加速度作為輸入所得到的仿真結果與測試結果的討論,易知采用4個垂直方向的力、12個方向的加速度、4個垂直方向的加速度作為輸入并計及互譜影響,均可得到各測點的加速度響應情況,但得出結果的計算量和計算所得結果的精度有所不同。采用12個加速度作為輸入需要計算的互譜密度矩陣階數為12×12,而且所需要計算的場點響應傳遞函數為12個;采用4個加速度或者4個力作為輸入所要計算的互譜密度矩陣階數為4×4,場點響應傳遞函數的計算量為4個。因而對于輸入通道選擇的多少和物理量(力還是加速度)的選擇將是減少計算量,提高仿真計算精度的關鍵。
圖 26~圖 28為以4個實測力值、4個加速度和12個加速度三種激勵工況下,在典型測點位置處仿真結果和實驗結果對比情況。三個響應測點位置及方向與前述討論相同,分別為6號點垂向、72號點橫向和O1點軸向響應。

圖26 測點6垂向響應實驗與仿真對比
Fig.26 Comparision between experiment and calculation acceleration PSD at point 6
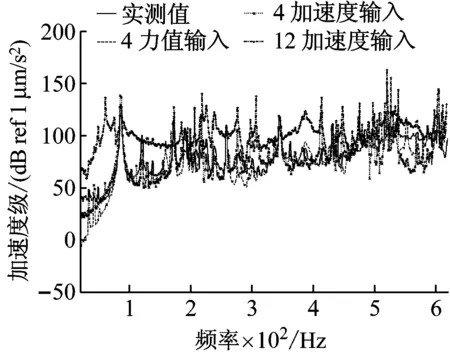
圖27 測點72橫向響應實驗與仿真對比
Fig.27 Comparision between experiment and calculation acceleration PSD at point 72
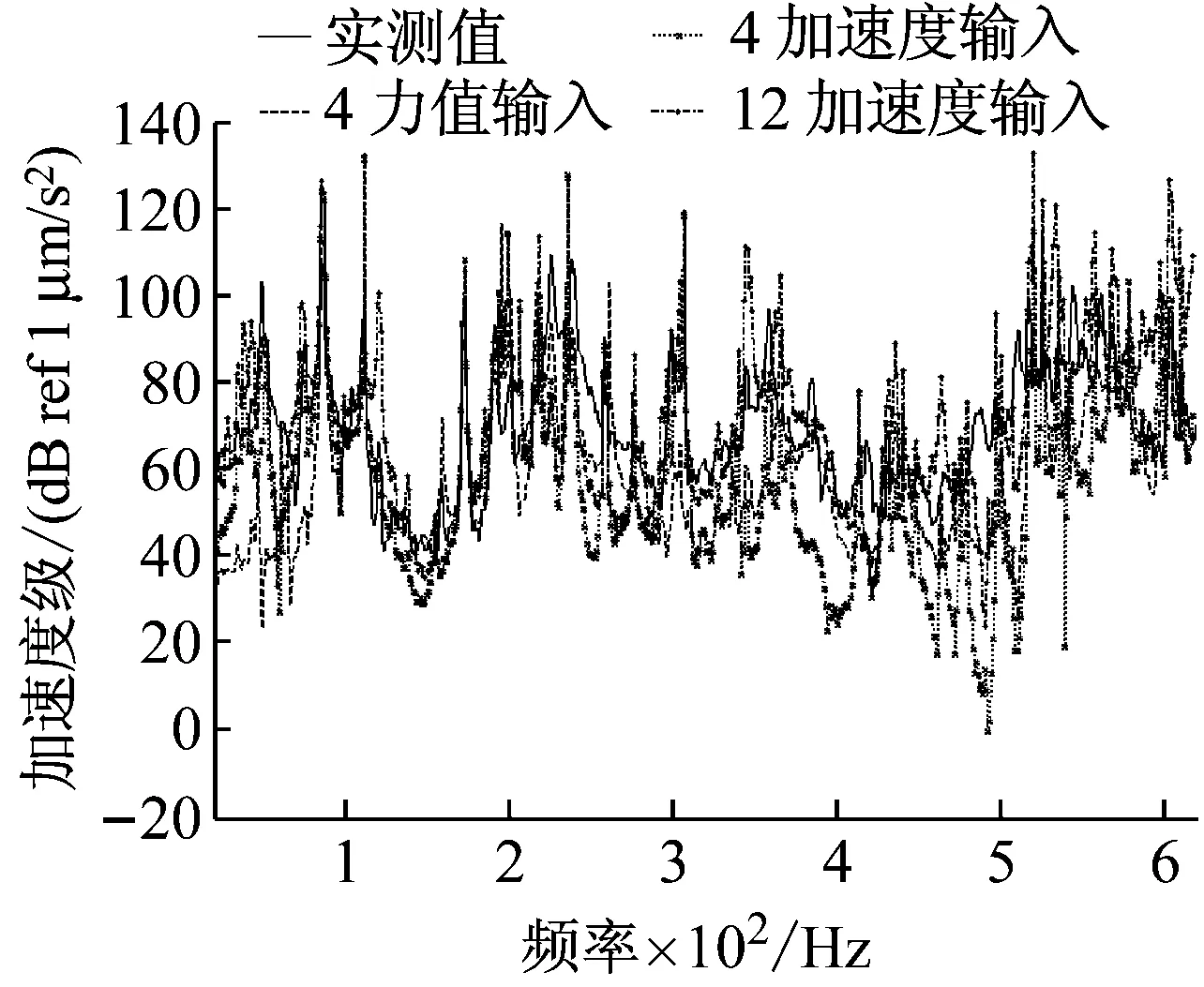
圖28 測點O1軸向響應實驗與仿真對比
Fig.28 Comparision between experiment and calculation acceleration PSD at pointO1
綜合起來,采用實測力值作為數值仿真時的輸入具有最好效果,與實驗值相差最小。采用4個加速度和4個力作為輸入所得的結果相比較而言,加速度作為輸入結果要稍差,可能原因在于加速度測量受傳感器的布置位置影響較大,較小的位置偏移也會帶來較大的測量誤差。采用加速度作為輸入時,由圖 27可知,并非參與計算的加速度輸入通道越多所得結果越好,關鍵還取決于采集的加速度信號質量(信噪比)及布置的測點位置(測點偏移),輸入通道噪聲信號導致的誤差通過系統的傳遞函數會得到不必要的放大,尤其在信噪比不太高的情況下。在工程實際應用中,被試結構在多點復雜載荷激勵條件下各輸入點對結構的作用往往相互耦合,且在某些測試工況下對激振力實現直接測量比較困難,而實現對加速度的測量則要相對容易。如何在激勵源附近布置合適的加速度傳感器,并根據實際結構的不同受力情況和有限元頻響函數的仿真結果,利用合適的加速度通道信號作為輸入來進行分析以減少誤差具有重要意義和工程應用價值,還需要進一步開展相關研究。正確獲取各激振點至各響應點之間的系統傳遞函數是整個仿真計算正確開展的前提,因而需要建立準確的有限元模型并對計算模型進行校核。
6 結 論
在艙段結構基座上安裝激振電機,用串接的力傳感器配合電荷放大器獲取4個激振點位置的激振力,采用加速度計獲取激振點位置處的加速度值,對各路信號進行多通道同步數據采集。采用有限元仿真的手段獲得結構激振點位置在激振力作用下至各響應測點的振動響應傳遞函數。分別采用測量得到的激振點位置4個激振力、12個加速度和4個加速度作為輸入并考慮各輸入激勵的自譜和互譜,綜合振動響應傳遞函數,得到了各測點響應的數值仿真預報結果,并與實驗結果進行了對比,主要結論如下:
(1) 開發了基于MATLAB和LabVIEW混合編程的計算程序,綜合兩種語言的優勢,方便直觀地實現信號處理和譜運算過程。基于隨機過程理論,采用隨機信號分析的方法對測試信號進行分析處理。采用商業有限元軟件獲取振動響應傳遞函數,以實測的加速度信號或者力信號作為輸入,結合傳遞函數進而求得仿真結果。將實測結果與仿真結果進行對比研究,結果表明所建立的基于隨機過程理論的振動響應求解方法準確、可行。
(2) 采用力傳感器所得實測力值作為輸入并計及各激振點輸入力之間的互譜,結合振動響應傳遞函數所得仿真結果與實驗結果符合最好。
(3) 采用實測加速度作為結構振動響應求解的輸入并計及各輸入加速度之間的互譜,綜合頻率響應函數計算結果,可以得到結構的振動響應。對比結果表明計及互譜輸入的通道并非越多越好,需要根據系統傳遞函數和實際測試加速度信號質量合理地選擇輸入通道數目。
參 考 文 獻
[1] 紀剛, 張緯康, 周其斗. 隨機力作用下的水下結構聲輻射分析[J]. 船舶力學,2006,10(2):153-159.
JI Gang, ZHANG Weikang, ZHOU Qidou. Stochastic analysis on radiation from a randomly excited underwater structure[J]. Journal of Ship Mechanics, 2006,10(2):153-159.
[2] ALLEN M J, VLAHOPOULOS N. Integration of finite element and boundary element methods for calculating the radiated sound from a randomly excited structure[J]. Computers and Structures,2000,77: 155-169.
[3] ALLEN M J, VLAHOPOULOS N. Noise generated from a flexible and elastically supported structure subject to turbulent boundary layer flow excitation[J]. Finite Elements in Analysis and Design,2001,37: 687-712.
[4] ALLEN M J, SBRAGIO R, VLAHOPOULOS N. Structural/Acoustic Sensitivity Analysis of a Structure Subjected to Stochastic Excitation[J]. AIAA JOURNAL,2001,39(7):1270-1279.
[5] TAO J S, LIU G R, LAM K Y. Sound radiation of a thin infinite plate in light and heavy fluids subject to multi-point excitation[J]. Applied Acoustics,2001,62:573-587.
[6] BURROUGHS C B. Acoustic radiation from fluid-loaded infinite circular cylinders with doubly periodic ring supports[J]. J Acoust Soc Am,1984,75(3):715-722.
[7] BURROUGHS C B, HALLANDER J E. Acoustic radiation from fluid-loaded ribbed cylindrical shells excited by different types of concentrated mechanical drives[J]. J Acoust Soc Am,1992,91(5):2721-2739.
[8] 陳明,王斌,曹為午. 水下復雜殼體結構在多源激勵下的振動及聲輻射特性研究[J]. 聲學學報,2009,34(6):498-505.
CHEN Ming, WANG Bin, CAO Weiwu. Research on vibration and acoustic radiation of the submerged complicated shell structure with multiple excitations[J]. Acta Acustica, 2009,34(6):498-505.
[9] 王雪仁,繆旭弘,賈地,等. 多源激勵作用下結構振動響應的試驗研究[J]. 振動與沖擊,2011,30(3):246-251.
WANG Xueren, MIAO Xuhong, JIA Di, et al. Experimental study on structural vibration response induced by multi-excitations[J]. Journal of Vibration and Shock, 2011,30(3):246-251.
[10] 劉濤. 水中復雜殼體的聲-振特性研究[D]. 上海:上海交通大學,2002.
[11] 葉文榮,張恒,繆旭弘,等. 多點激勵力下圓柱殼振動響應優化設計[J]. 噪聲與振動控制,2013(2):36-39.
YE Wenrong, ZHANG Heng, MIAO Xuhong, et al. Design of cylindrical shell for dynamic performance optimization under multi-excitations[J]. Noise and Vibration Control, 2013(2):36-39.
[12] 周軍偉,何琳,徐榮武,等. 響應傳導函數在船舶機械噪聲預報中的應用及實驗驗證[J]. 振動與沖擊,2014,33(22):78-82.
ZHOU Junwei, HE Lin, XU Rongwu, et al. Practical application and experimental verification of transmissibility function[J]. Journal of Vibration and Shock, 2014,33(22):78-82.
[13] 謝志勇. 復雜載荷作用下結構振動與噪聲輻射理論及其試驗研究[D]. 武漢:海軍工程大學,2012.
[14] 王宇,張力,洪寶林,等. 正弦力校準中降低質量塊振動響應不均勻影響的設計/方案[J]. 振動與沖擊,2010,29(7):228-231.
WANG Yu, ZHANG Li, HONG Baolin, et al. Mass design plan in sinusoidal force calibration to avoid nonuniform vibration response[J].Journal of Vibration and Shock, 2010,29(7):228-231.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:44
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
