基于聚類的流面自動布局及生成算法
2018-06-26 10:20:10解利軍桂立業何麗莎
計算機工程與應用
2018年12期
唐 燁,解利軍,桂立業,何麗莎,鄭 耀
浙江大學 航空航天學院,杭州 310027
1 引言
流場可視化是科學可視化的經典分支之一。通過直觀的圖像來表示抽象的流場數據[1],既可以加快從數據中獲取信息的速度,又能讓不具備領域專業知識的人理解這些信息。如今在航空航天、氣象、自動化等領域的科學研究過程中,流場可視化已經成為不可或缺的技術。
流面可視化是流場可視化的一種方式,近幾年來越來越流行[2],相比于常用的流線法,流面法更適合表現復雜的流場結構[3],并且展現更豐富的流場局部信息[4]。
1.1 相關概念
流場是一種矢量場。在空間坐標系(x,y,z)中,任意點(x0,y0,z0)都有唯一確定的向量(Vx,Vy,Vz)與之對應,就說在空間(x,y,z)范圍內存在矢量場V。在流場中,該矢量場即速度場。
流線是一個無質量的質點(種子點)在某一穩定流場中以某點為起點,在該流場中運行的軌跡。流線上的每一點都與流場中該點對應的速度相切。假設V(x)是一個三維向量場,在時刻t經過點x0的流線為L(x0,t),其中L(x0,t)滿足公式(1):

類似于流線的概念,流面是某條種子線C的所有種子點以C中的位置為起點在穩定流場中運行的軌跡的集合,設該流面為S,S滿足公式(2),流面S中的點處處與流場中該點處的速度相切[5]。

其中S(s,t)是種子點C中s處的種子點在流場中的運動軌跡,也就是由C中s處的種子點生成的流線,S為C中所有點生成的流線的集合,如圖1所示。
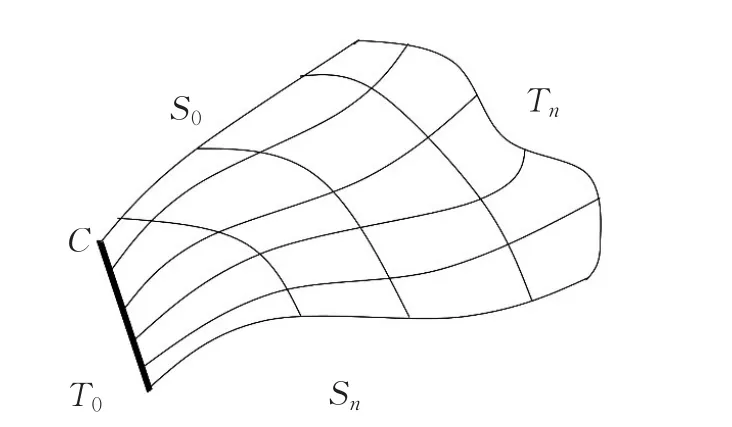
圖1 流面示意圖
1.2 相關工作
Hultquist首先在1992年提出了一種高效的流面生成算法——前沿推進算法。……
登錄APP查看全文