平滑參考調節來提升電力驅動系統的動態響應
2018-07-04 08:12:44
汽車文摘 2018年7期
動態的系統在實際中出現超調現象不是我們期望的,不以犧牲系統響應速度為代價來減少超調量,可以提升系統允許運作的范圍,使系統可以更接近極限工況去工作。關于設定值的調整的先前方法是提出了一種有效的策略去提升設定值的軌跡,通過基于響應的趨勢和它的臨近設定值的點來臨時修正設定值,然而,這項策略是為不遲鈍的固態單元所設計,它不能直接應用于應用程序,例如電子驅動系統,頻繁的步改變設定值可能造成機械應力,這篇文章處理這個問題并且提出了一種交替的策略,基于連續性的改變設定值而不是離散的,提出的方法被運用于電子驅動系統,仿真和實驗的結果證明了提出方法的理想行為。
在控制中,控制參數的選擇對于有限帶寬的物理系統是在響應速度、超調量、閉環系統穩定時間之間的一種權衡,典型的情況是允許某個大小的超調來換取更快響應速度。然而,超調減少了允許的系統的運作范圍,而且,它可能破壞系統的運作限制而導致不穩定的情況,因此,減輕超調帶給響應速度在閉環系統的影響是意義重大的。

Fig 3.運用SSPAACE來提升設定點的軌跡
之前的工作提出了一種叫做SPAACE的策略去提高設定值的跟蹤能力(Fig 3.)。盡管證明了良好的行為,SPAACE不能直接應用于電子驅動系統(Fig 4.),因為有設定點步長的改變可能造成力矩的波動,并且反過來造成機械的疲勞和壓力。在本文中,基于監控交換機制的方法被開發出來,以改善系統的跟蹤能力,減少超調而不影響系統的速度。SSPAACE的設計和應用是很容易的,從其他不同工況的仿真和實驗的結果證明了SSPAACE產生更小的超調,并且修改設定點比SPAACE更加平滑。
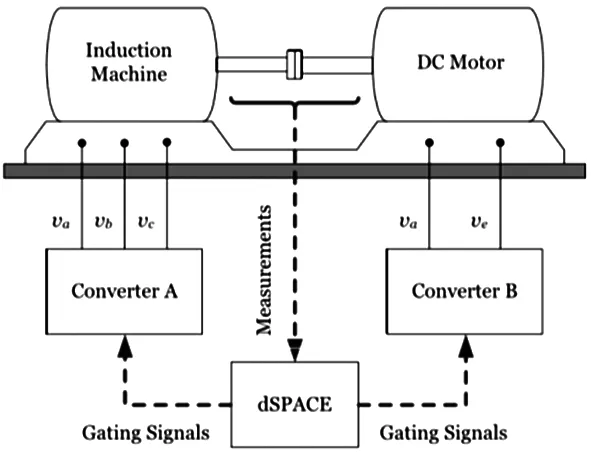
Fig 4.所研究的驅動系統原理圖
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
