基于Simulink的電動(dòng)客車整車控制器軟件層設(shè)計(jì)
2018-07-05 05:58:14蔡瀟揚(yáng)袁所賢
蔡瀟揚(yáng),鮑 寧,袁所賢
(江蘇大學(xué) 汽車與交通工程學(xué)院, 江蘇 鎮(zhèn)江 212013)
目前,環(huán)境問(wèn)題和能源問(wèn)題日益突出,而用新能源汽車逐步取代傳統(tǒng)燃油汽車在一定程度上可以解決這些問(wèn)題,因此各國(guó)都十分重視新能源汽車的發(fā)展。電動(dòng)化、智能化是未來(lái)汽車行業(yè)必然的發(fā)展方向。電動(dòng)汽車有噪聲低、能源利用率高、排放低甚至零排放等優(yōu)點(diǎn),因此成為目前研究的重點(diǎn)[1-4]。純電動(dòng)車整車控制器(VCU)是驅(qū)動(dòng)汽車的大腦,負(fù)責(zé)數(shù)據(jù)的采集處理、邏輯運(yùn)算及控制實(shí)現(xiàn)。車輛運(yùn)用控制策略時(shí),一方面應(yīng)充分滿足駕駛員的駕駛需求,另一方面要考慮成本的合理性,同時(shí)滿足汽車的動(dòng)力性、平順性和其他基本技術(shù)性能要求。整車控制器算法復(fù)雜、開發(fā)周期長(zhǎng)、調(diào)試與驗(yàn)證工作量大,因此本文提出基于Simulink開發(fā)整車控制器來(lái)克服以上缺點(diǎn)[5-6]。
1 軟件整體設(shè)計(jì)方案
整車控制器(VCU)的主要功能是通過(guò)傳感器采集加速踏板、制動(dòng)踏板等數(shù)字/模擬信號(hào),接收各個(gè)子系統(tǒng)電控單元ECU發(fā)送的數(shù)據(jù)信息,對(duì)接收到的數(shù)據(jù)信息進(jìn)行解析,結(jié)合車輛運(yùn)行時(shí)的信息進(jìn)行診斷,并發(fā)出相應(yīng)的指令[7]。按功能來(lái)分,純電動(dòng)客車整車控制器軟件設(shè)計(jì)包括底層驅(qū)動(dòng)軟件設(shè)計(jì)和應(yīng)用層軟件設(shè)計(jì)。底層驅(qū)動(dòng)軟件主要對(duì)模數(shù)轉(zhuǎn)換模塊、通信模塊(包括CAN或LIN通信)、輸入輸出接口等模塊進(jìn)行初始化,用讀寫接口函數(shù)編寫和封裝;應(yīng)用層軟件是整車控制系統(tǒng)的高層管理軟件,根據(jù)車輛的不同狀態(tài),通過(guò)整車控制策略對(duì)整車系統(tǒng)進(jìn)行控制。VCU軟件構(gòu)架設(shè)計(jì)如圖1所示。

圖1 VCU軟件構(gòu)架設(shè)計(jì)
2 VCU軟件集成開發(fā)流程
純電動(dòng)客車整車VCU采用MC9S12XEP100芯片,利用Simulink中S-function函數(shù)編寫VCU的底層驅(qū)動(dòng)模塊,采用Simulink自帶的模塊對(duì)整車軟件層控制策略進(jìn)行建模,通過(guò)底層驅(qū)動(dòng)模塊與應(yīng)用層模型的集成,利用Simulink中Code generation生成軟件層C代碼,包括底層驅(qū)動(dòng)代碼、上層算法代碼以及MC9S12XEP100所需要的文件。將文件編譯調(diào)試生成可執(zhí)行的S19目標(biāo)工程文件。最后利用BootLoader下載工具將其下載至VCU硬件,如圖2所示。

圖2 VCU集成開發(fā)流程
3 整車控制策略研究
整車控制策略在考慮駕駛員動(dòng)作情況下采集加速踏板開度、制動(dòng)踏板、鑰匙門、行車開關(guān)等模擬量信號(hào)以及電機(jī)溫度、功率、電池溫度、輸出電流、輸出電壓等信號(hào)的同時(shí),綜合分析駕駛員的駕駛意圖,并結(jié)合行駛工況、電池剩余電量(SOC)等影響因素對(duì)電機(jī)進(jìn)行轉(zhuǎn)矩合理分配。此外,對(duì)電機(jī)的工作區(qū)域進(jìn)行限定并控制電池SOC值在一定的范圍,可延長(zhǎng)電機(jī)的使用壽命和確保電池保持高效狀態(tài),使純電動(dòng)汽車的續(xù)駛里程得到提升。當(dāng)整車系統(tǒng)發(fā)生故障時(shí),整車控制器通過(guò)對(duì)接收到的報(bào)文信息進(jìn)行分析并與車輛預(yù)先設(shè)定的工作模式進(jìn)行比較,對(duì)電機(jī)、繼電器等零部件進(jìn)行保護(hù)或者對(duì)控制失效的零部件故障進(jìn)行診斷、處理。圖3是整車行駛控制策略邏輯。

圖3 整車行駛控制策略邏輯
3.1 工作模式
電動(dòng)輕型客車依據(jù)整車的運(yùn)行工況和動(dòng)力總成不同狀態(tài)主要分為7種工作模式,并可根據(jù)整車運(yùn)行條件進(jìn)行模式切換,各模式及其控制功能[8-9]如表1所示。
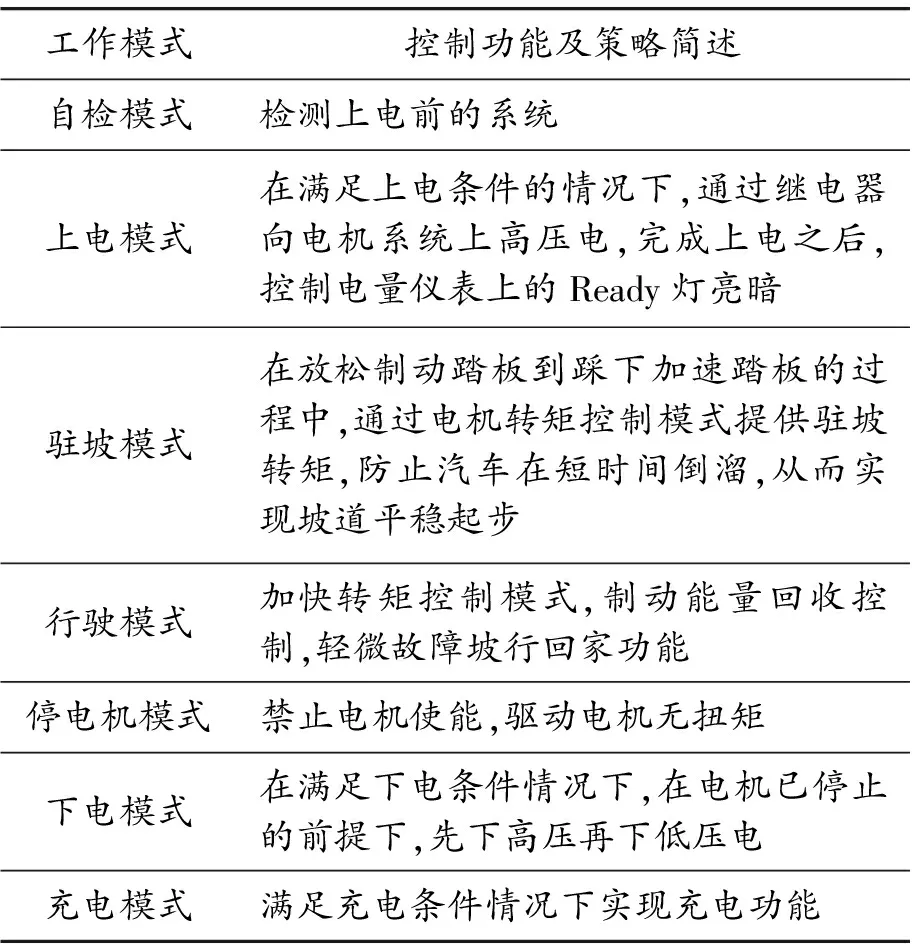
表1 整車工作模式及控制功能
3.2 加速扭矩控制策略
本文采用線性踏板控制策略,即在轉(zhuǎn)速不變的情況下通過(guò)控制使轉(zhuǎn)矩隨油門踏板開度增加而線性增加,相對(duì)于非線性踏板控制策略,可以在中高負(fù)荷下滿足駕駛員駕駛樂趣的要求和在低負(fù)荷情況下提升車輛的操縱穩(wěn)定性[10]。針對(duì)所選取的控制策略對(duì)本項(xiàng)目的純電動(dòng)輕型客車進(jìn)行道路測(cè)試實(shí)驗(yàn),用曲線標(biāo)定駕駛感覺,并結(jié)合電機(jī)的外特性曲線繪制出純電動(dòng)車的動(dòng)力特性圖,也就是加速轉(zhuǎn)矩MAP,如圖4所示。圖4中最下面的曲線表示的是在加速踏板回位時(shí),電機(jī)滑行制動(dòng)轉(zhuǎn)矩的大小,從而達(dá)到對(duì)傳統(tǒng)汽車發(fā)動(dòng)機(jī)的倒拖阻轉(zhuǎn)矩的模擬,并相應(yīng)地將制動(dòng)能量轉(zhuǎn)化為電能儲(chǔ)存到蓄電池中。
3.3 制動(dòng)能量回收控制策略
本文制動(dòng)能量回收控制策略的設(shè)計(jì)針對(duì)的是本項(xiàng)目使用的前軸驅(qū)動(dòng)的純電動(dòng)輕型客車,其控制策略中選擇電液并聯(lián)式作為制動(dòng)能量回收方案,即通過(guò)車速、電池SOC、制動(dòng)踏板開度的值來(lái)調(diào)整電機(jī)制動(dòng)回饋轉(zhuǎn)矩,在不改變?cè)兄苿?dòng)系統(tǒng)機(jī)械結(jié)構(gòu)的情況下使其在合理范圍內(nèi)。但是需要對(duì)原有液壓制動(dòng)系統(tǒng)做適當(dāng)?shù)母倪M(jìn)才能正常實(shí)現(xiàn)其控制策略,也就是說(shuō)通過(guò)增加制動(dòng)踏板的位移傳感器,整車控制器將傳感器檢測(cè)到的踏板開度作為其控制策略的判斷條件[11]。
4 故障診斷控制策略
純電動(dòng)汽車要求整車控制器能合理分配能量,最大限度地提高車載電池能量的利用效率。而整車控制器(VCU)是實(shí)現(xiàn)這些系統(tǒng)控制的關(guān)鍵設(shè)備。VCU故障診斷與處理策略非常重要,其安全、穩(wěn)定的運(yùn)行可以在確保車輛行駛安全的同時(shí)提高各控制系統(tǒng)之間數(shù)據(jù)傳遞的效率和準(zhǔn)確性。系統(tǒng)故障包括電機(jī)、電池及兩者的控制器故障,電壓系統(tǒng)故障,各部分附件故障等[12]。針對(duì)不同部件存在的故障提出不同的故障診斷及處理策略,如表2所示。
5 底層驅(qū)動(dòng)模塊
Matlab用戶通過(guò)S-function函數(shù)在Simulink模型中創(chuàng)建自制驅(qū)動(dòng)模塊,利用S-function編寫MC9S12XEP100的底層驅(qū)動(dòng)模塊,并將它們封裝成Simulink的模塊。可以通過(guò) Matlab、C/C++、Ada或者Fortran語(yǔ)言來(lái)對(duì)S-function函數(shù)進(jìn)行編寫。本文通過(guò)C語(yǔ)言來(lái)編寫S-function,在 Simulink中完成底層驅(qū)動(dòng)封裝。先利用C語(yǔ)言編寫C-MEX S-function用于基本的仿真,然后利用TLC語(yǔ)言編寫TLC文件來(lái)控制代碼的自動(dòng)生成[13-15],保證代碼的有效性及規(guī)律性。編寫過(guò)程如圖5所示。
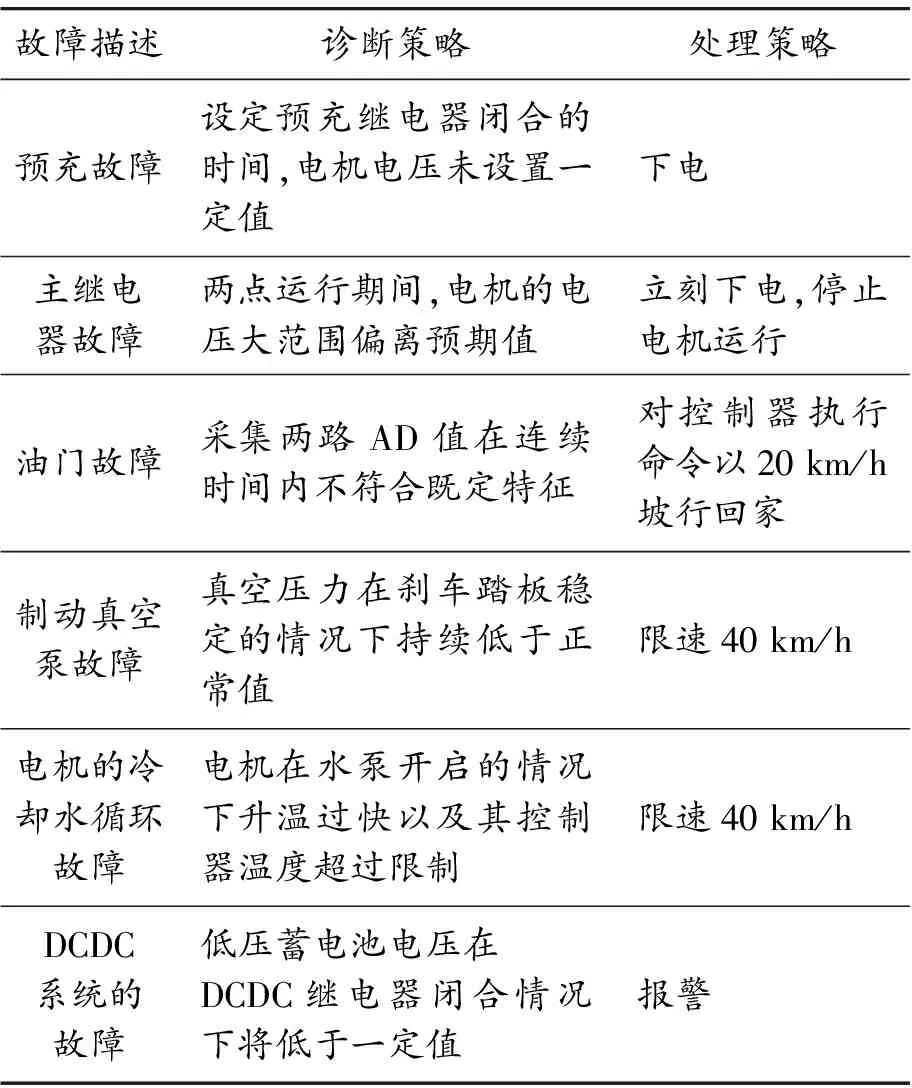
表2 故障診斷及處理策略
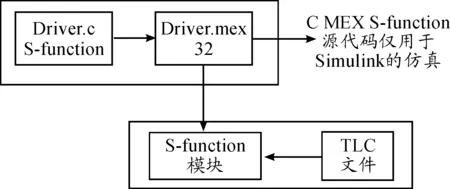
圖5 S-Function編寫底層函數(shù)的過(guò)程
6 VCU軟件設(shè)計(jì)
純電動(dòng)輕型客車VCU軟件層是利用Simulink工具開發(fā)的,在Simulink環(huán)境下進(jìn)行仿真驗(yàn)證,最終利用Simulink中Code generation按鈕將整車控制策略模型生成C代碼。將生成的C代碼導(dǎo)入到編譯環(huán)境后可以與底層驅(qū)動(dòng)一起編譯成MC9S12XEP100芯片的可執(zhí)行代碼。將文件編譯生成可執(zhí)行的S19目標(biāo)工程文件,最后利用BootLoader把文件下載到VCU硬件,完成軟件層的設(shè)計(jì),如圖6、7所示。

圖6 整車控制模型

圖7 Bootloader下載程序示意圖
7 VCU的策略驗(yàn)證及道路測(cè)試
將VCU安裝于本項(xiàng)目中已改裝完成的純電動(dòng)輕型客車上。依據(jù)GB/T15089—2001規(guī)定,該測(cè)試車輛屬于Ml類車輛。根據(jù)GB/T18385—2005規(guī)定,該車輛進(jìn)行相關(guān)性能測(cè)試時(shí)應(yīng)滿足以下道路條件:① 平直道路;② 道路平整干燥;③ 附著系數(shù)良好。該車采用的永磁同步電機(jī)為25 kW/192 V,磷酸鐵鋰電池組為175 Ah/192 V。表3為整車及其部件參數(shù),圖8為電機(jī)外特性曲線。

圖8 驅(qū)動(dòng)電機(jī)外特性曲線
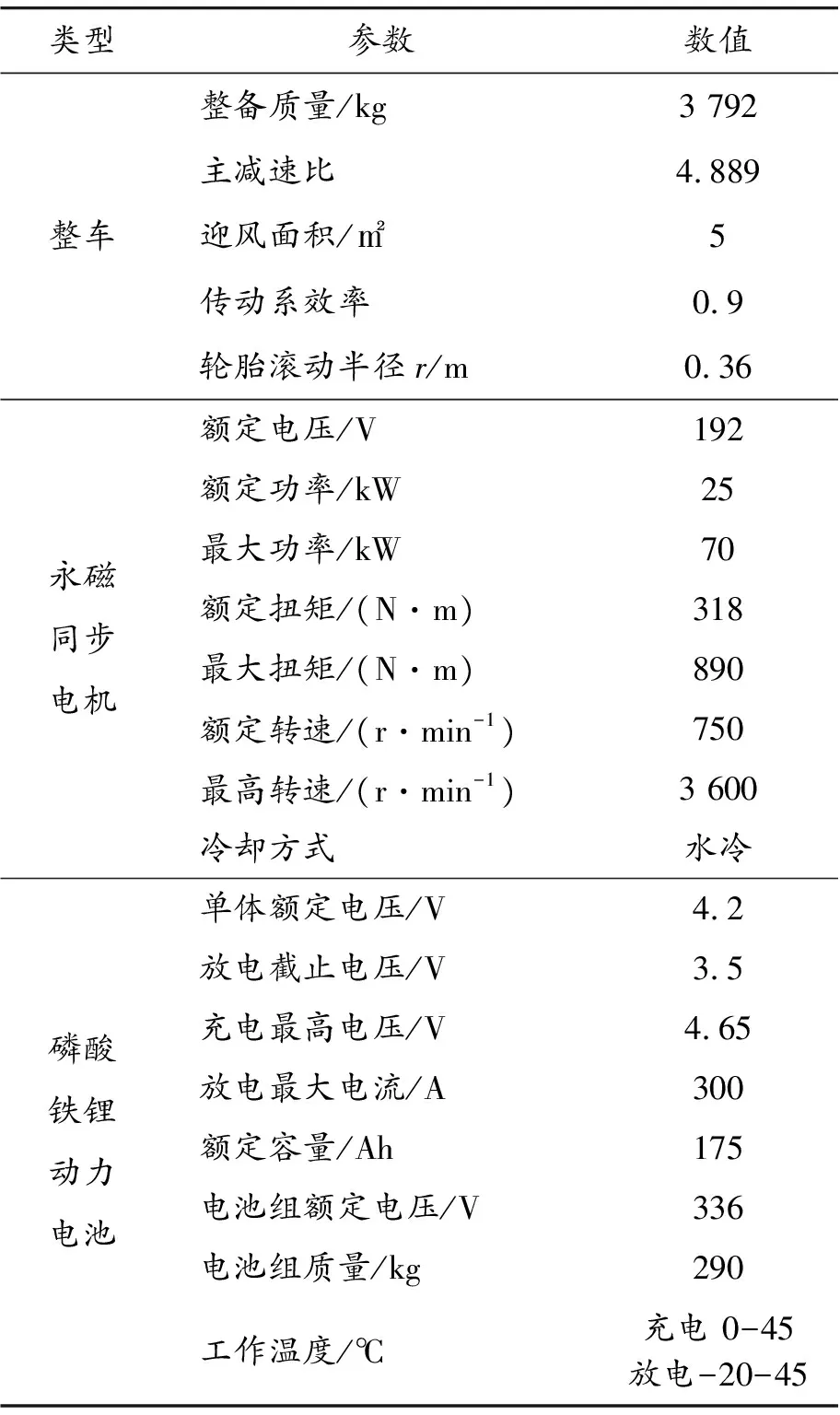
類型參數(shù)數(shù)值整車整備質(zhì)量/kg3 792主減速比4.889迎風(fēng)面積/m25傳動(dòng)系效率0.9輪胎滾動(dòng)半徑r/m0.36永磁同步電機(jī)額定電壓/V192額定功率/kW25最大功率/kW70額定扭矩/(N·m)318最大扭矩/(N·m)890額定轉(zhuǎn)速/(r·min-1)750最高轉(zhuǎn)速/(r·min-1)3 600冷卻方式水冷磷酸鐵鋰動(dòng)力電池單體額定電壓/V4.2放電截止電壓/V3.5充電最高電壓/V4.65放電最大電流/A300額定容量/Ah175電池組額定電壓/V336電池組質(zhì)量/kg290工作溫度/℃充電 0-45放電-20-45
7.1 車輛加速及最高車速試驗(yàn)
駕駛員在試驗(yàn)起始位置啟動(dòng)車輛,然后通過(guò)將加速踏板踩到底,將車輛加速達(dá)到最高車速,并在此過(guò)程中記錄車速、電機(jī)輸出轉(zhuǎn)矩、電池電流和電壓等相關(guān)信息。完成上述試驗(yàn)后,再以相反的方向重復(fù)進(jìn)行相同的試驗(yàn)。取2次測(cè)得的時(shí)間平均值即為加速時(shí)間。如圖9所示,車輛從靜止加速達(dá)到最高車速需要20 s,達(dá)到最高車速之后經(jīng)過(guò)35.48 s以最高車速行駛1 000 m。因此,經(jīng)計(jì)算該車試驗(yàn)最高車速為86.7 km/h。
7.2 轉(zhuǎn)矩控制策略試驗(yàn)
如圖10所示,試驗(yàn)車在空擋時(shí),司機(jī)松開制動(dòng)踏板,車輛倒溜(車速為負(fù));掛前進(jìn)擋后,車輛進(jìn)入駐坡模式,不會(huì)出現(xiàn)上述狀況;在加速階段,隨加速踏板開度加大,目標(biāo)扭矩增加,車速平穩(wěn)上升。
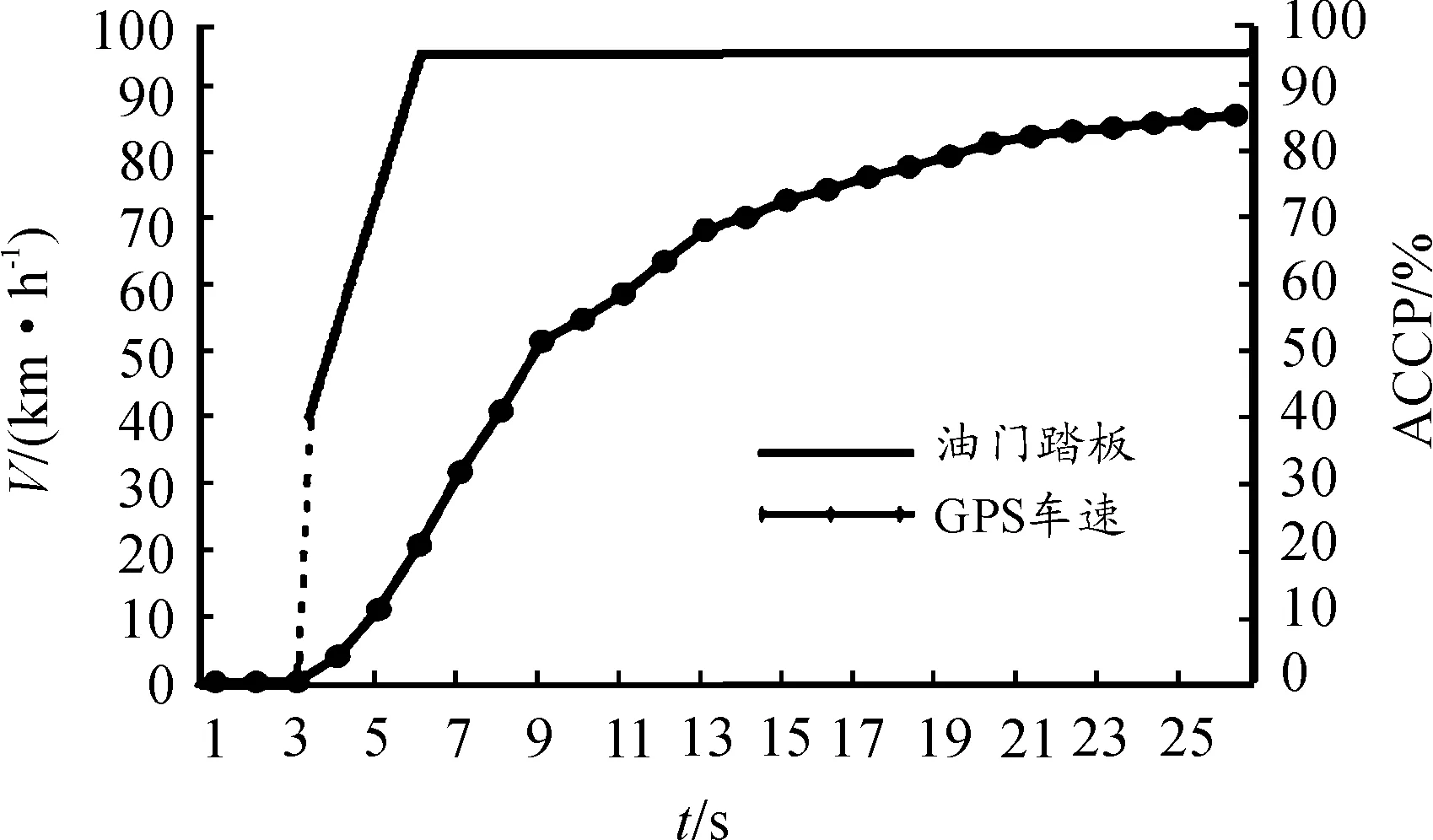
圖9 加速性能測(cè)試
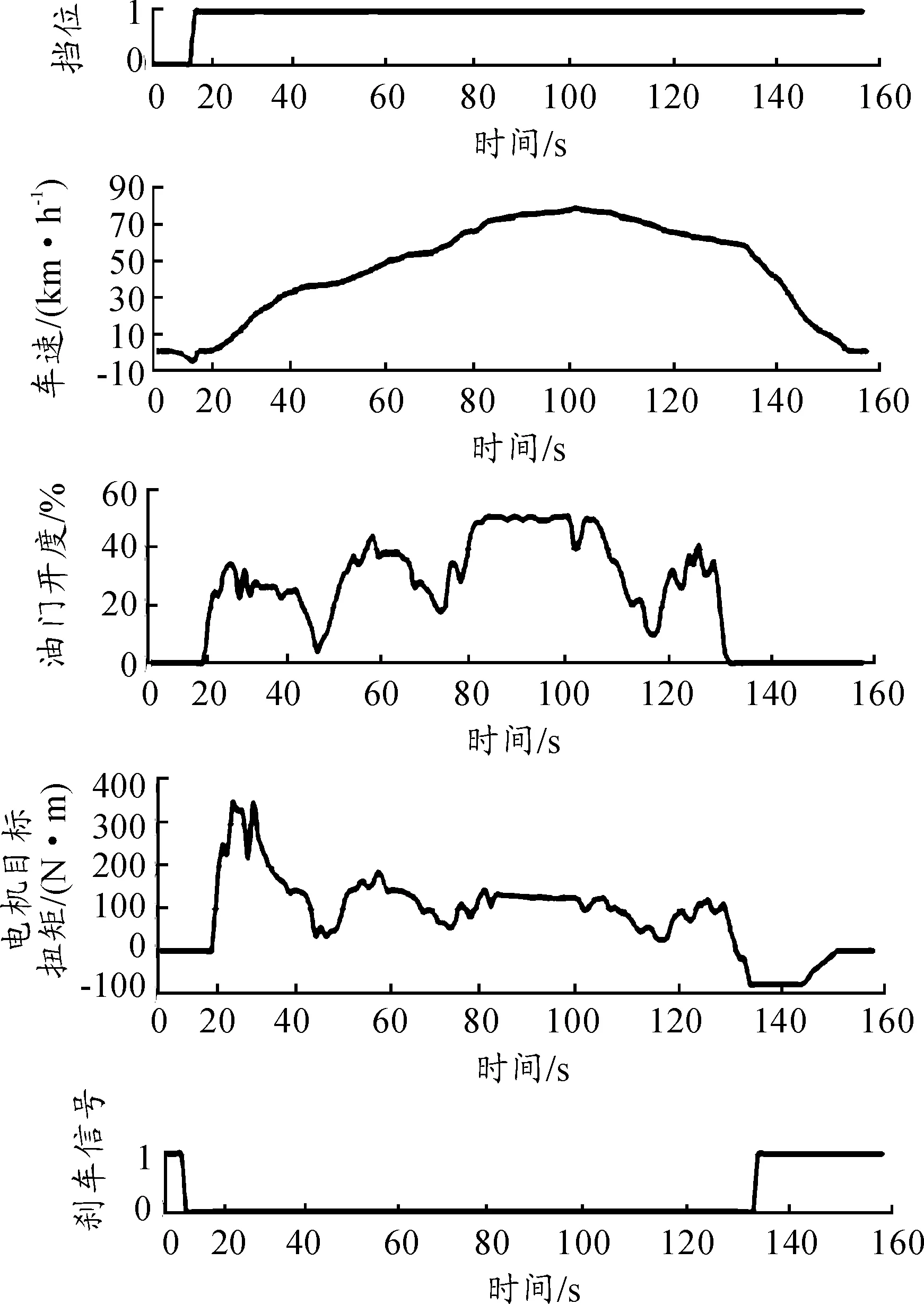
圖10 輕客起步試驗(yàn)性能曲線
7.3 車輛制動(dòng)能量回收試驗(yàn)
如圖11所示,該測(cè)試曲線顯示了在輕踩制動(dòng)踏板時(shí)制動(dòng)能量回收過(guò)程。由于制動(dòng)踏板存在空行程,圖中前15 s液壓系統(tǒng)并沒有工作。當(dāng)司機(jī)輕微制動(dòng)時(shí),制動(dòng)踏板處于空行程中,并未產(chǎn)生作用,液壓系統(tǒng)未處在工作狀態(tài)。車輛在15 s后進(jìn)入滑行制動(dòng),當(dāng)制動(dòng)踏板行程逐步增大到閾值時(shí),判定需要進(jìn)行控制,此時(shí)車輛開啟制動(dòng)模式,車輛進(jìn)入滑行能量回饋模式。從26 s之后,在液壓制動(dòng)力和制動(dòng)回饋力兩者作用下,由滑行回饋模式切換到制動(dòng)回饋模式,車速也迅速下降。車速和制動(dòng)回饋力兩者之間存在正相關(guān),即車速不斷下降,相應(yīng)制動(dòng)回饋力也在降低。當(dāng)車速降至0時(shí),制動(dòng)回饋則不再起作用。制動(dòng)前車輛速度為59.6 km/h,經(jīng)過(guò)14.86 s,制動(dòng)后車速為6.4 km/h,制動(dòng)的總距離為129.0 m。車輛輕微制動(dòng)電量實(shí)際消耗0.38 Ah,回饋電量為0.15 Ah,相比無(wú)能量回饋測(cè)試電量降低28.3%。

圖11 輕踩踏板制動(dòng)能量回收
圖12描述了司機(jī)深踩制動(dòng)踏板時(shí),車輛的滑行能量回饋和制動(dòng)能量回饋過(guò)程。其中,從6.1 s到6.5 s,車輛處在滑行能量回饋模式,制動(dòng)踏板開關(guān)信號(hào)在6.5 s時(shí)被觸發(fā),此時(shí)車輛切換到制動(dòng)能量回饋模式。整個(gè)制動(dòng)過(guò)程共歷時(shí)6.4 s,車速則由制動(dòng)前的59.6 km/h減速到最終車速5 km/h,制動(dòng)過(guò)程行駛的總距離為58.65 m,實(shí)現(xiàn)的電量回饋量為0.09 Ah,深踩制動(dòng)踏板過(guò)程實(shí)際電量消耗0.44 Ah,相比無(wú)能量回饋時(shí)的測(cè)試,電量節(jié)約16.7%,制動(dòng)過(guò)程中最大減速度為-3.1 m/s2。
另外,在車輛高速行駛且需要制動(dòng)時(shí),為確保車輛安全制動(dòng),制動(dòng)能量回饋被禁止。圖13是高速制動(dòng)中禁止制動(dòng)能量回饋曲線,在5 s時(shí)加速踏板收回,車輛處在滑行制動(dòng)模式,在8 s時(shí)車速較高,禁止滑行能量回饋和制動(dòng)能量回饋,車輛僅在液壓制動(dòng)力的作用下制動(dòng),制動(dòng)回饋模式在車速降至60 km/h時(shí)起作用。該試驗(yàn)過(guò)程共歷時(shí)14.24 s,從試驗(yàn)制動(dòng)前車速為78.8 km/h到試驗(yàn)完成制動(dòng)后車速為5 km/h,制動(dòng)過(guò)程行駛的總距離為185.6 m,實(shí)際電量消耗0.68 Ah,滑行過(guò)程回饋電量為0.10 Ah,制動(dòng)過(guò)程回饋電量為0.07 Ah。
在電池SOC較高情況下,滑行與制動(dòng)能量回饋被禁止的制動(dòng)過(guò)程如圖14的測(cè)試所示。圖中電池SOC為0.97,加速踏板在2.6 s時(shí)收回,VCU發(fā)出電機(jī)停機(jī)指令,電機(jī)自由轉(zhuǎn)動(dòng),使車輛不進(jìn)入滑行回饋模式。之后分別在3.7 s和8.6 s時(shí)對(duì)車輛制動(dòng),VCU發(fā)送停機(jī)指令,僅在液壓制動(dòng)力作用下車輛車速逐漸下降。

圖12 深踩踏板制動(dòng)能量回收

圖13 高速時(shí)制動(dòng)能量回收

圖14 高SOC值時(shí)制動(dòng)能量回收
8 結(jié)束語(yǔ)
本文對(duì)整車控制策略進(jìn)行研究,并在Simulink中完成整車控制策略的建模,利用代碼自動(dòng)生成功能完成軟件層的設(shè)計(jì)。參照有關(guān)標(biāo)準(zhǔn),測(cè)試了該電動(dòng)汽車動(dòng)力性、最高運(yùn)行車速等參數(shù)。對(duì)整車行駛控制策略進(jìn)行了驗(yàn)證,并對(duì)該車制動(dòng)能量回收策略進(jìn)行了測(cè)試分析。研究結(jié)果證明:利用Simulink開發(fā)整車控制器完全可行,這對(duì)于電動(dòng)車的研發(fā)是很有意義的。利用Simulink將試驗(yàn)仿真后再生成C代碼導(dǎo)入并編譯成可執(zhí)行代碼,無(wú)需直接進(jìn)行代碼的輸寫,可在一定程度上減少調(diào)試和驗(yàn)證的工作量,縮短開發(fā)周期,降低開發(fā)成本。
[1] 冉振亞,楊超,曹文明.基于Matlab/Simulink的電動(dòng)汽車驅(qū)動(dòng)系統(tǒng)起動(dòng)過(guò)程的模糊控制與仿真[J].客車技術(shù)與研究,2004,26(4):1-3.
[2] 殷國(guó)棟,金賢建,張?jiān)?分布式驅(qū)動(dòng)電動(dòng)汽車底盤動(dòng)力學(xué)控制研究綜述[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2016,30(8):13-19.
[3] 安曉峰,尹磊,陳立建.電動(dòng)汽車的故障診斷系統(tǒng)[J].客車技術(shù)與研究,2016,38(3):48-51.
[4] 陳燎,程云峰,盤朝奉.具備能量回收功能的電動(dòng)汽車?yán)m(xù)駛里程研究[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2016,30(8):27-30.
[5] RAMASWANY D,RYAN M.Development of an ECU for a Hybrid Electric Vehicle [C]//2004 SAE World Congress Detroit.Michigan:[s.n.],2004:8211-8216.
[6] DUOBA M,NG H,LARSEN R.Characterization and Comparison of Two Hybrid Electric Vehicles(HEVs)-Honda Insight and Toyota Priu[J].Applied Physics Letters,2001,99(25):2463.
[7] MUTOH N, HAYANO Y.Electric braking control methods for electricvehicles with independently driven front and rear wheels[J].IEEE Trans Ind Electron, 2007,54(2):1168-1176.
[8] MUTOHETAL N.Driving characteristics of an electric vehicle system with independently driven front and rear wheels[J].IEEE Trans Ind Electron, 2006,53(3):803-813.
[9] The Math Works Inc.Simulink Coder Target Language Compiler[EB/OL].[2013-10-22].http://www.docin.com/p-402305023.html.
[10] FREESCALE.KL25 Sub-Family Reference Manual REV[EB/OL].[2013-05-20].https://www.taodocs.com/p-50743441.html.
[11] 袁所賢.純電動(dòng)輕型客車整車控制器的設(shè)計(jì)[D].鎮(zhèn)江:江蘇大學(xué),2016.
[12] 戴能紅,姜朋昌,孫飛,等.純電動(dòng)客車整車控制策略設(shè)計(jì)與驗(yàn)證[J].汽車工程師,2015(11):31-33.
[13] 張祥,楊志剛,張彥生.Matlab/Simulink模型到C/C++代碼的自動(dòng)實(shí)現(xiàn)[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2006,20(11):111-113.
[14] 劉偉,周亞勛,彭雷,等.基于Simulink下的水輪機(jī)調(diào)速器的仿真[J].重慶理工大學(xué)學(xué)報(bào)(自然科學(xué)),2016,30(12):90-94.
[15] 張華,王健偉.基于Simulink與Trucksim聯(lián)合仿真的多輪獨(dú)立電驅(qū)動(dòng)客車驅(qū)動(dòng)力控制及分配[J].客車技術(shù)與研究,2017,39(4):1-4.
[16] 劉杰.基于模型的設(shè)計(jì)及其嵌入式實(shí)現(xiàn)[M].北京:北京航空航天大學(xué)出版社,2010.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
能源工程(2020年6期)2021-01-26 00:55:22
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實(shí)用技術(shù)(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測(cè)與儀表(2016年20期)2016-04-11 11:38:24
 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2018年6期
重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))2018年6期
- 重慶理工大學(xué)學(xué)報(bào)(自然科學(xué))的其它文章
- Analytical Properties of Solutions and First Integrals of a Class of the Third-Order Autonomous Systems
- 基于WSID的交通信息采集系統(tǒng)
- mRuby2在原核細(xì)胞中的表達(dá)及純化
- 基于MOVES的城市道路交叉口組織優(yōu)化排放分析
- 環(huán)境溫度對(duì)電動(dòng)汽車?yán)m(xù)駛里程影響的試驗(yàn)研究
- 充電倍率對(duì)高功率型磷酸鐵鋰動(dòng)力電池循環(huán)壽命影響的研究