礦山機械電氣系統的設計
2018-07-06 07:09:08武勃
機械管理開發 2018年6期
武 勃
(西山煤電(集團)有限責任公司發電分公司, 山西 太原 030024)
引言
礦山機電電車主要由機械傳動系統以及電氣控制系統組成,其電氣控制系統是保證電機車能夠安全高效運行的關鍵,而其所處的環境比較惡劣[1],但又是必不可少的運輸工具,因此必須設計一個穩定高效的控制系統,用來確保礦山機車能夠長時間平穩運行且維修方便[2-3]。
1 礦山機電電車電氣系統的總體設計
如圖1所示,通過以dsPIC35F6110A單片機為基礎設計其動力傳輸系統,可以實現與礦山機電電車的實際系統相匹配,同時對機車的軟硬件系統分別進行設計。礦山機電電氣系統硬件由異步電機、主回路、下位機以及驅動部分構成;系統軟件則主要是監測系統以及控制系統。考慮到礦山機電所在地區的硬件條件限制,礦山機電電氣系統采用蓄電池或者電線為其供電。以dsPIC35F6110A單片機作為下位機的控制核心組件。控制組件由放大電路、PWM電路、電壓及電流檢測、過流及過載保護裝置等組成[4-5]。
礦山機電電氣系統的軟件,由位于上位機的監控軟件以及位于下位機處的機車控制軟件構成。監控軟件使用CAN交換協議與下位機車控制軟件進行及時通訊,與此同時也可在下位機上設置電機的運行參數以及狀態顯示,通過實時的后臺監控,用來掌握電氣系統的具體運行參數并對可能產生的故障進行分析。
下位機機車控制軟件通過采用矢量控制方式,用來改變速度和力矩。上位機和下位機兩個部分組成的系統可以實現對礦山機電電車的實際控制,礦山機電電氣系統的軟件結構圖如圖2所示。

圖1 礦山機電電氣系統硬件結構布置示意圖
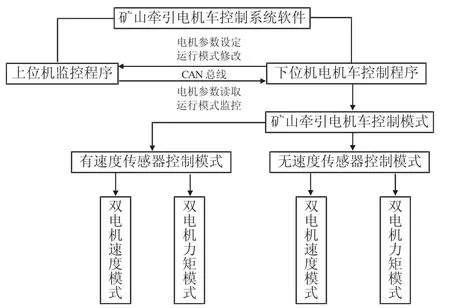
圖2 系統軟件結構組成示意圖
1.1 主電路系統設計
圖3 為電氣系統主回路設計圖,該系統設計采用的是直流供電模式。該主電路可細分為預充電電路、放電電路以及由多個NPN型三極管所組成的逆變電路。其中預充電電路中的電容C1和C2是高頻電容,用以濾除電源中的高頻干擾信號,C3是極性母線電容,直流電源DC對C3進行充電。放電電路中,單片機通過對三極管T7基極施加高電平使之導通并通過電阻R2進行放電。逆變電路共包含六個NPN型三極管,每個三極管的集電極與發射極通過反向并聯二極管實現擊穿保護。單片機通過六個引腳輸出PWM信號控制每個三極管基極電流,進而實現直流電源到三相交流電的逆變轉換。系統回路采用的則是拓撲結構形式的主回路,用以保證三相異步電機可以與供電系統相匹配。
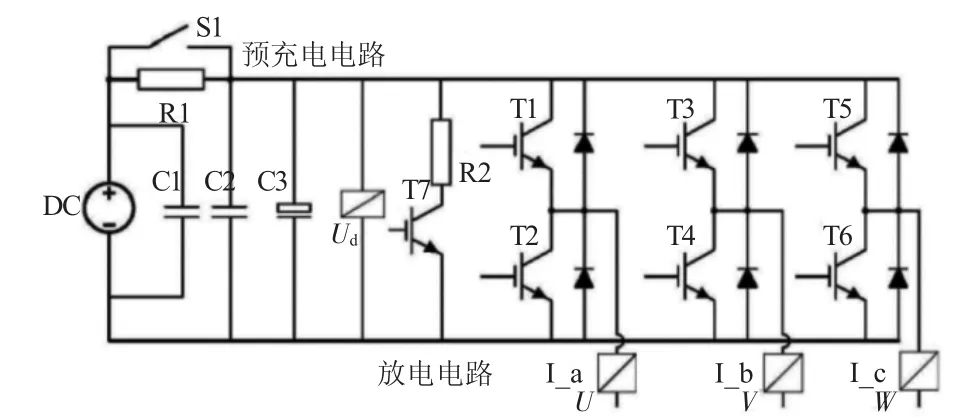
圖3 電氣系統的主回路設計示意圖
1.2 下位機電路硬件設計
如圖4所示,硬件部分以dsPIC35F6110A單片機為核心基礎,電壓和電流檢測則是運用AD轉換裝置作為輸入信號,司機通過IO口進行操作,通訊及放電電路與dsPIC35F6110A單片機進行鏈接通訊,通訊協議通過dsPIC35F6110A單片機轉成測速電信息、PWM信號、故障和保護電路信號,再經由反饋電路對信息進行二次調節。

圖4 系統下位機電路設計布置示意圖
1.3 下位機軟件設計
下位機接收來自于上位機的反饋信息,下位機的硬件設計主要解決通信接口,控制電路的設計以及模擬信號采樣電路設計,設計時需考量被檢測信號的通道數、變化速度、分辨率、測量精度、速度,所以下位機必須通過矢量算法進行控制。
1.4 上位機軟件設計
上位機采用的是Microsoft Visual C++Vision 6作為系統開發平臺,通過上位機來實現的主要功能是基于操作平臺的人機信息傳遞,以達到對礦用機電電車快速、精確控制的目的。礦山電車中電流、電壓、轉速等顯示、保存及其他功能是通過上位機軟件直接讀取顯示。
上位機軟件設計包括了軟件開始控制界面及相關參數控制修改界面,如圖5所示。

圖5 上位機軟件數據修改界面
從圖5可以明顯看出上位機系統不僅可以檢測出通訊狀態、查詢系統可能存在的故障,還可以對通訊狀態進行修改,采用RAM和EEPROM功能可以實現對數據直觀顯示的功能,對于操作者來說,可以對其調試、修改。
2 結語
本文礦山機械電氣系統的設計包括基于單片機進行總體的電路設計以及數據處理。該系統實現了對礦山機電電車的矢量控制和力矩控制,經實驗測試和分析驗證這套系統不僅符合礦山機械的使用要求,而且始終處于一種良好的狀態。
[1]張迪.礦山采掘機械設備的維修與管理[J].內蒙古煤炭經濟,2018(3):74-75.
[2]劉和平,鄭群英,江渝,等.dsPIC通用數字信號控制器原理及應用—基于dsPIC30F系列[M].北京:北京航空航天大學出版社,2007.
[3]楊居義.單片機課程設計指導[M].北京:清華大學出版社,2009.
[4]鈴木雅臣.晶體管電路設計[M].北京:科學出版社,2004.
[5]胡鄧華,馮剛,孫際哲.基于STC單片機的數字采控電路設計
[J].現代電子技術,2018(8):53-56.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
礦產勘查(2020年7期)2020-12-25 02:43:42
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02