門架起升高度指示系統設計應用
2018-07-13 06:02:54何群星
中國儲運 2018年7期
文/何群星
1.現狀
20世紀40年代,搬運軍事物資的需要,促進了叉車技術的迅速發展。我國自上世紀60年代通過測繪仿制日本叉車,開創了我國的叉車事業。經過五十年的發展,我國的叉車行業技術水平已逐步達到了國際領先水平。叉車作為機動工業車輛的典型機種,由于其具有機體緊湊、軸距較短、轉向靈活和偏轉角大等突出優點,廣泛應用于港口倉庫、貨物集散、貨艙內堆碼、拆垛作業等。
隨著經濟的快速發展,土地成本增高日益突顯,為有效利用土地,5米以上的高位貨架越來越多,有些甚至超過8米,高起升的門架,因為起升高度高,駕駛員必須仰著頭操作,但即使仰著操作也會因視線不好,很難準確對準貨架,進行裝卸操作,經常仰著操作駕駛員也非常容易疲勞;對倉庫貨架的排布,燈光照明提出的要求很高,無形中削減了高位貨架帶來的經濟利益。研究可以用于在高起升架上應用的高度指示系統越發重要,對于提高叉車的競爭力以及適應性具有重要的意義。
2.電瓶叉車高度指示系統設計思想
2.1 傳統操作的缺點分析
叉車傳統貨物裝卸操作均由操作人員肉眼確認貨架位置,采取相應的起升與下降操作,這種操作在低起升的門架及光線充足的條件下完全可以實現,如若在夜間操作或者光線條件不太好的天氣操作高位貨架,會大大地降低操作人員的效率,同時還加速操作人員的疲勞程度。在此環境下,對于高起升的門架提出了新的要求,要對起升高度做一個精確的識別,高度指示系統被應用到叉車行業。

圖1 高起升門架的結構圖
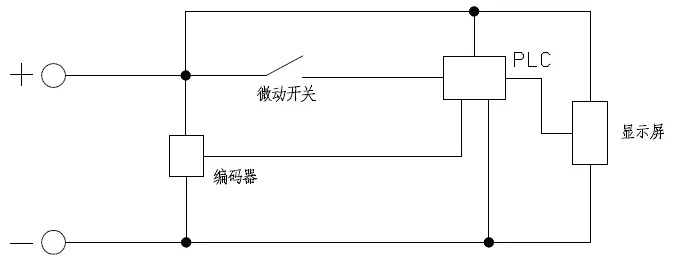
圖2 高度指示系統電氣原理圖
2.2 高度指示系統的設計理念
根據高起升門架的結構(如圖1所示),其運行規律為自由缸先起升,達到設計高度L1,帶到內門架以及中門架同步起升,且同步達到設計高度。考慮到內門架及中門架的同步性,以及高度相同的因素,確定測量中門架的運行高度,來測定門架的起升高度。
3.電瓶叉車高度指示系統設計
3.1 高度指示系統電氣原理
由微動開關來判斷內門架及中門架是否開始運行,由編碼器完成對中門架當前起升高度的測量,并且通過微動開關的信號來控制PLC是否接收編碼器的信號(如圖2所示)。當微動開關閉合,確定內門架及中門架開始起升,編碼器開始統計中門架的起升高度,PLC開始采集編碼器傳輸過來的信號,并通過計算公式(1)來確定門架當前高度,并通過顯示屏顯示。

圖3 高度指示系統結構圖

H:當前門架起升高度;
L1:全自由缸起升的設計高度;
R:編碼器內壁直徑;
N:編碼器轉動圈數。
還有一種操作是起升一會后停止,再進行起升或下降的操作,PLC通過編碼器的正反向功能來確認是起升還是下降,如果是正向的轉動,則圈數在原有基礎上進行疊加,如果是負向的,則在原有基礎上往下減,以此來實現高度的無差別顯示。
由公式(1)可以看出,此系統的最低顯示高度是L1,此功能只有在門架起升高度大于L1的時候才體現出來。
3.2 高度指示系統實現的架構

圖4 輪軸總成拆解圖
測量就可以實現整個設想,在中門架上安裝了一個聯動裝置(如圖3)來完成對N的測量,其中主要組成部分是拉線跟輪軸總成(如圖4)。將輪軸總成安裝在固定的外門架中橫梁上,確保輪軸總成不會隨門架的運行而運動,在中門架上安裝一拉線,此拉線繞過輪軸總成中的輪子(如圖4),并且通過壓縮彈簧來實現輪子隨拉線的移動而做出相應距離的轉動;而安裝在輪軸總成中的編碼器通過軸(如圖4)與輪子保持同軸轉動,從而實現對N的測量,也即完成對中門架的起升高度的測量,根據同步性,內門架的起升高度也完成測量。
另外,微動開關的動作可以通過圖3中的壓板與安裝在外門加上橫梁的微動開關實現。
4.結論
此高度指示系統其指示精度可達到0.01米,完全滿足工作要求。該門架起升高度指示系統已經在我公司1-2T系列前移式叉車上試裝,高度顯示效果良好。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
