基于電場信息的交流架空線路無人機巡線安全距離仿真研究
2018-07-23 08:09:22重慶大學弘深學院武子恒梁書豪
電子世界 2018年13期
關鍵詞:模型
重慶大學弘深學院 武子恒 蔣 仕 梁書豪
0.引言
近年來隨著無人機技術的發展,其在電力線路巡檢方面的應用也日益廣泛[1-3]。在巡線過程中,為了收集線路運行情況和故障信息,無人機需要靠近導線和桿塔甚至沿著輸電線巡航,其內部的電子元件就有可能在作業環境電磁場干擾下出現異常從而影響測量數據精確度[4],甚至會導致無人機操作不受控制使其與線路和桿塔的撞擊,對無人機、輸電線和桿塔等造成破壞,甚至造成電力系統的故障,危及系統運行安全,無人機巡線的避障策略和和其巡線作業中安全距離界定的研究就顯得尤為重要。而避障和安全距離研究的前提是獲得無人機與線路的距離,目前的無人機大多采用激光雷達測距[5-6]、紅外測距[7]、超聲波測距[8]等方法,但是激光雷達測距設備成本高、壽命短,紅外測距容易受到陽光等環境因素的干擾,超聲波測距結果易受到復雜地形和周圍環境的影響。
輸電線路通電后在其周圍空間產生的交變電場是其固有特性,而且電場強度與場-源距離之間存在著定量的關系[9],而這些電場信息在無人機的安全距離評測中尚未得到充分利用。電場強度的測量無需定點瞄準、不存在測量盲點也不受光線強度和環境溫度的影響,,通過電場強度信息可以確定無人機與導線之間的距離信息。
本文針對交流架空線無人機巡線時與線路的距離測量和安全距離界定提出了基于電場仿真分析的研究方法,建立了包含輸電線路、桿塔和無人機的仿真模型,對輸電線、桿塔和無人機周圍空間以及無人機表面的電場強度進行分析,并研究無人機位置處電場強度與其距離導線距離的關系,并對其耐受電場的分析得到無人機巡線的安全距離標準,旨在對無人機巡線的工程實踐提供參考依據,提高無人機巡線的安全水平。
1.仿真模型
1.1 輸電線和桿塔模型
本文主要針對220kV和500kV的交流架空輸電線路進行研究,其電場強度較大,對無人機巡檢影響較為明顯。根據GB50545-2010和《國家電網輸變電工程通用設計(2011版)》的相關標準和不同電壓等級線路實際運行情況,設置了相應的導線型號、對地高度和桿塔的相關參數,如表1所示。
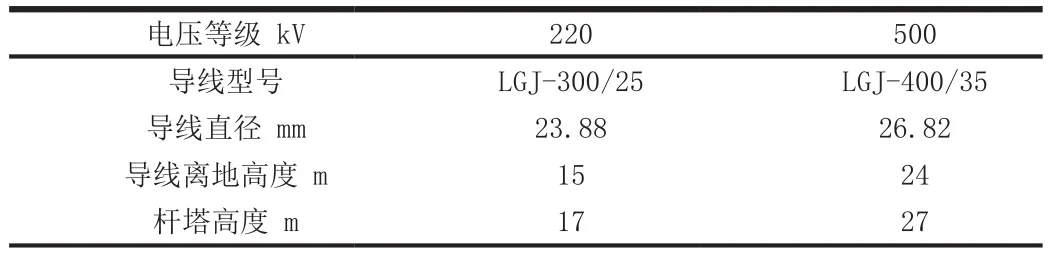
表1 220kV和500kV輸電線和桿塔模型相關參數
為簡化仿真模型,將模型中的分裂導線用等效導線代替,其等效半徑計算式為:
式中:Req為分裂導線等效半徑,R為分裂半徑,m為分裂數,r為分裂子導線半徑。
根據以上數據和簡化,搭建220kV和500kV的輸電線路和桿塔模型,如圖1(a)和(b)所示。
本文截取桿塔周圍沿線X軸方向長度10m,桿塔Y軸方向長度共15m的區域作為研究對象,涵蓋了無人機在桿塔附近巡檢作業正常區域,將其置于三維坐標系內,便于觀察電場的空間分布特性。

圖1 桿塔的仿真模型
1.2 無人機模型
將四旋翼無人機作為研究對象,為簡化Maxwell的網格剖分,提高計算速度,我們對無人機模型進行簡化,即忽略無人機上的螺絲、螺帽等細小零部件,并將無人機機身作實心模型處理,,無人機簡化模型如圖2所示。
無人機簡化模型,機身(含旋翼)對角線長85cm,機身(含旋翼)高度20cm,機身材料采用碳纖維[10],設置相關電氣參數,相對介電常數為7,電導率為100 S/m。

圖2 無人機的簡化模型
2.電場仿真結果及分析
如圖3所示,在圖1所示的模型中分別加入四臺無人機模型,其中兩臺編號為1、3的無人機在Y方向上距離邊相導線5m,另外兩臺變化為2、4的無人機Y方向上距離邊相導線10m。對以上模型進行仿真分析,導線周圍空間的電場分布分別如圖3和圖4所示。
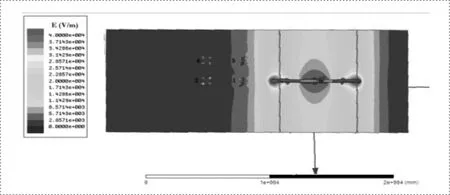
圖3 220kV模型俯視圖的電場強度分布

圖4 500kV模型俯視圖的電場強度分布
分析以上結果得出,220kV線路電場強度的最大值為57kV/m,500kV線路電場強度的最大值為113kV/m,均位于兩個邊相導線與絕緣子的交點處。如圖3和圖4所示,從整體的電場分布上來看,電場強度分布大致關于X軸對稱。從無人機所在位置局部的電場分布來看,對比無人機所處位置及其關于X軸對稱位置的電場強度,無人機使其附近電場分布發生畸變,導致電場強度增大。
為了深入研究無人機對電場分布的影響,接下來取中心位于桿塔所在橫截面,距離邊相導線5m的編號為1的無人機表面為研究對象,繪制出其表面的電場強度分布圖,如圖5所示。

圖5 (a)220kV線路無人機表面電場強度分布
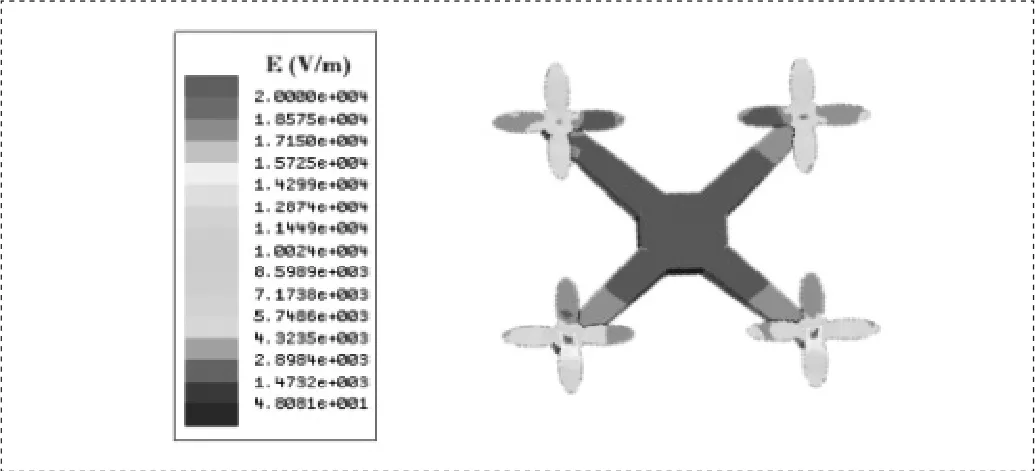
圖5 (b)500kV線路無人機表面電場強度分布
由圖5可知,無人機表面的電場強度分布不均勻,220kV線路中無人機表面最大場強為17.45kV/m,500kV/m線路中無人機表面最大場強為40.51kV/m,旋翼葉片邊緣和轉軸連接處等尖端位置場強分布集中,數值較大,遠超過其位置處本身空間電場的數值。
3.交流架空線路無人機巡線安全距離的確定
為了進一步確定無人機對其周圍空間電場分布的影響,進而確定無人機巡線的安全距離,在1.1所述仿真模型中,在距離邊相導線2.5m、4.5m、6.5m、8.5m、10.5m和12.5m處分別放置無人機模型,如圖6所示。

圖6 無人機距離導線不同距離模型圖
分別在220kV和500kV下對上述模型進行仿真分析,得到6架無人機機身表面電場強度的最大值數據,見表2、3。
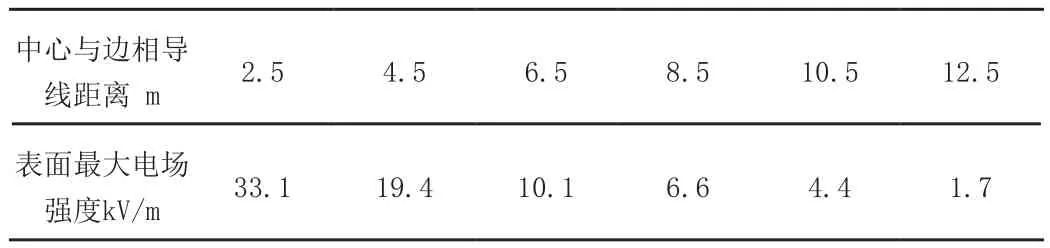
表2 距離邊相導線距離不同的無人機機身表面電場強度的最大值(220kV)
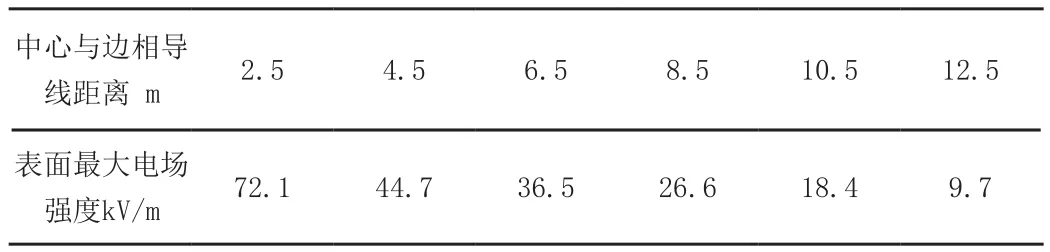
表3 距離邊相導線距離不同的無人機機身表面電場強度的最大值(500kV)
將上述數據繪制成表面最大電場強度和中心距邊相導線距離的折線圖,如圖7所示。

圖7 無人機表面最大電場強度和中心距邊相導線距離的折線圖
通過上述結果可以看出,無人機表面的最大電場強度隨著與邊相導線距離的增大而減小,大致呈二次曲線規律。一般而言,在10kV/m的電場強度下,電子元器件的性能就會受到影響[11],從數據中可以看出,220kV模型中在距離6.5 m左右,無人機表面場強的最大值就達到了10kV/m,而對于500kV模型而言,這一距離則是12.5 m左右。
考慮到無人機巡檢系統的導航定位精度一般為3 m[12-13],并考慮操作人員進行避障操作時反應時間等帶來的誤差,我們設置2.5m的裕度,因此,利用無人機對交流220kV和500 kV交流架空輸電線路開展巡檢作業時,最小安全距離宜分別設置為12m和18m。
4.結論
本文建立了有桿塔的交流架空輸電線路模型,和碳纖維材料的四旋翼無人機模型,充分考慮了桿塔的存在和無人機機身材料的影響,分析了220kV和500kV的電壓等級下桿塔附近的電場分布和無人機表面的電場分布,分別考慮了無人機和邊相導線的距離和無人機機身不同位置對電場強度的影響。
仿真分析發現無人機會使其周圍電場強度分布產生畸變,畸變作用使無人機附近電場強度增大;無人機與邊相導線的距離越大,其表面電場強度越小,電場強度大致和距離成二次函數的關系;無人機表面的電場分布極不均勻,旋翼葉片和轉軸連接處等尖端處場強分布集中,數值較大,因此在無人機設計和選用時,應該盡量光滑無尖端和毛刺,電場測量裝置也應盡量避開尖端處,以免電場畸變對測量和安全距離的判定造成影響。
結合上述分析結果,本文綜合考慮了無人機巡檢系統的導航定位精度和操作測量誤差等因素,分別將220kV和500kV線路中巡線無人機的安全距離確定為12m和18m。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19